По настоящей заявке испрашивается приоритет по предварительной заявке № 60/941273 США, поданной 31 мая 2007 г. под названием “Distance dependent error mitigation in real-time kinematic (RTK) positioning”, которая полностью включена в настоящую заявку путем ссылки.
Эта заявка связана с заявкой № 12/119450 на патент США, поданной 12 мая 2008 г. под названием “Partial search carrier-phase integer ambiguity resolution”, реестр поверенного № 60877-5018-US, и эта заявка полностью включена в настоящую заявку путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
В общем, раскрытые осуществления относятся к техническим решениям, связанным с системами определения местоположения, такими как глобальная система позиционирования (GPS) или европейская система Галилео, а более конкретно к способам уменьшения атмосферных ошибок в измерениях кода и фазы несущей.
УРОВЕНЬ ТЕХНИКИ
В глобальной системе определения местоположения, такой как глобальная система позиционирования (GPS), используют группу спутников для определения положения или навигации объектов на земле. В настоящее время каждый спутник в глобальной системе позиционирования передает два сигнала несущей частоты, L1 и L2, на частотах 1,5754 ГГц и 1,2276 ГГц и длинах волн 0,1903 м и 0,2442 м соответственно. В следующем поколении глобальных навигационных спутниковых систем (GNSS), таких как модернизированная глобальная система позиционирования и система Галилео, будет предоставляться третий сигнал несущей частоты, L5. В глобальной системе позиционирования L5 будет иметь частоту 1,1765 ГГц и длину волны 0,2548 м.
В глобальной системе позиционирования приемник глобальной системы позиционирования (GPS-приемник) обычно выполняет измерения двух видов: измерения псевдодальности и измерения фазы несущей.
Измерение псевдодальности (или измерение кода) является основной наблюдаемой величиной в GPS-системе, которую можно получать в GPS-приемниках всех типов. Используются С/А или Р коды, модулируемые на сигнал несущей частоты. При наличии измерений глобальной системы позиционирования (GPS-измерений) дальность или расстояние между GPS-приемником и каждым из множества спутников вычисляется путем умножения времени пробега сигналов (от спутника к приемнику) на скорость света. Эти дальности обычно называют псевдодальностями, поскольку GPS-измерения могут включать в себя ошибки вследствие различных приводящих к ошибке факторов, таких как ошибка синхронизации часов спутника, эфемеридная ошибка, ионосферные и тропосферные явления преломления, шум слежения приемника и ошибка вследствие многолучевого распространения и т.д. Для исключения или уменьшения этих ошибок при многих применениях глобальной системы позиционирования используют дифференциальные режимы работы. Дифференциальная глобальная система позиционирования (DGPS) обычно включает в себя базовый опорный GPS-приемник, пользовательский GPS-приемник и механизм связи между пользовательским и опорным приемниками. Опорный приемник размещают на известном месте и используют для формирования поправок, относящихся к некоторым или всем перечисленным выше факторам ошибки. Поправки, формируемые на опорной станции, или исходные данные, измеряемые на опорной станции, или поправки, формируемые третьей стороной (например, компьютером или сервером), основанные на информации, принимаемой с опорной станции (и, возможно, также с других опорных станций), поступают в пользовательский приемник, в котором после этого поправки или исходные данные используются для надлежащей коррекции своего вычисленного местоположения.
Измерение фазы несущей получают при интегрировании восстанавливаемой несущей сигнала, когда он поступает на приемник. Когда приемник начинает отслеживать фазу несущей сигнала, то вследствие неизвестного количества целых циклов при прохождении между спутником и приемником имеется целоцикловая неоднозначность в измерении фазы несущей. Чтобы получить высокую точность измерения фазы несущей, эта целоцикловая неоднозначность должна быть разрешена. Целоцикловые неоднозначности также известны как «целочисленные неоднозначности» после того, как они разрешены, или как «плавающие неоднозначности» до того, как они разрешены. В дифференциальных режимах работы используют измерения фазы несущей и часто их называют режимами работы определения местоположения/навигации с кинематикой в реальном времени.
Высокоточное определение положения в режиме кинематики реального времени глобальной системы позиционирования широко используют для многих геодезических и навигационных применений на суше, на море и в воздухе. Расстояние от пользовательского приемника до ближайшего опорного приемника может находиться в пределах от нескольких километров до сотен километров. По мере увеличения разнесения приемников (то есть расстояния между опорным приемником и мобильным приемником, положение которого определяют) проблема учета зависящих от расстояния систематических ошибок возрастает и, как следствие, надежное разрешение неоднозначности становится еще более сложной проблемой. Основная проблема заключается в том, что остаточными систематическими ошибками или ошибками после получения двойных разностей можно пренебрегать в целях разрешения неоднозначности только тогда, когда расстояние между двумя приемниками меньше чем около 10 км. При больших расстояниях зависящие от расстояния ошибки, такие как орбитальная ошибка и ионосферные и тропосферные задержки, становятся существенной проблемой. Определение того, насколько длительным должен быть период наблюдения для получения надежного разрешения неоднозначности, является проблемой при определении местоположения в режиме кинематики реального времени глобальной системы позиционирования. Чем больше требуется период наблюдения, тем больше «мертвое» время, в течение которого точное определение местоположения невозможно. Процесс разрешения неоднозначности необходим на начальной стадии навигации и/или геодезических работ на основе глобальной системы позиционирования и всякий раз, когда многие из сигналов глобальной системы позиционирования блокируются или ослабляются так, что происходят проскальзывания циклов или временные прекращения измерений. Контроль качества определения местоположения в режиме кинематики реального времени глобальной системы позиционирования является критическим и необходимым во время всех процессов: сбора данных, обработки данных и передачи данных. Процедуры контроля качества применяют при определении местоположения в режиме кинематики реального времени глобальной системы позиционирования на основе фазы несущей и в дифференциальной глобальной системе позиционирования на основе псевдодальности. Контроль качества и критерий достоверности для разрешения неоднозначности представляют существенную проблему при точном определении местоположения в режиме кинематики реального времени глобальной системы позиционирования.
СУЩНОСТЬ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Способ уменьшения зависящих от расстояния атмосферных ошибок в измерениях кода и фазы несущей включает в себя оценивание остаточной тропосферной задержки, множества остаточных ионосферных задержек и значения неоднозначности. Затем оцененное положение мобильного приемника обновляют в соответствии с этими оценками.
В одном варианте осуществления остаточную тропосферную задержку моделируют как состояние в фильтре Калмана. В одном осуществлении множество остаточных ионосферных задержек моделируют как состояния в фильтре Калмана. Функции обновления состояния фильтра Калмана включают в себя, по меньшей мере, один, зависящий от длины базовой линии фактор. Зависящий от длины базовой линии фактор соответствует расстоянию между опорным приемником и мобильным приемником.
В одном варианте осуществления множество значений неоднозначности сохраняют во множестве состояний в фильтре Калмана. Затем эти состояния обновляют в соответствии с функцией обновления состояния, которая включает в себя, по меньшей мере, один динамический фактор шума.
Оценка источников атмосферной ошибки ограничивает зависящие от расстояния ошибки средств режима кинематики реального времени глобальной системы позиционирования и делает возможными перспективные применения с точными оценками положения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
Фиг.1 - иллюстрация глобальной навигационной спутниковой системы;
Фиг.2 - блок-схема компьютерной системы, которая может быть использована для осуществления способа уменьшения атмосферных ошибок в измерениях кода и фазы несущей;
Фиг.3А и 3В - блок-схемы последовательности действий, иллюстрирующие способ уменьшения атмосферных помех в измерениях кода и фазы несущей в соответствии с некоторыми осуществлениями; и
Фиг.4 - блок-схема, иллюстрирующая компоненты в глобальной навигационной спутниковой системе в соответствии с некоторыми вариантами осуществления.
Одинаковые позиции приписаны соответствующим частям на всех чертежах.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
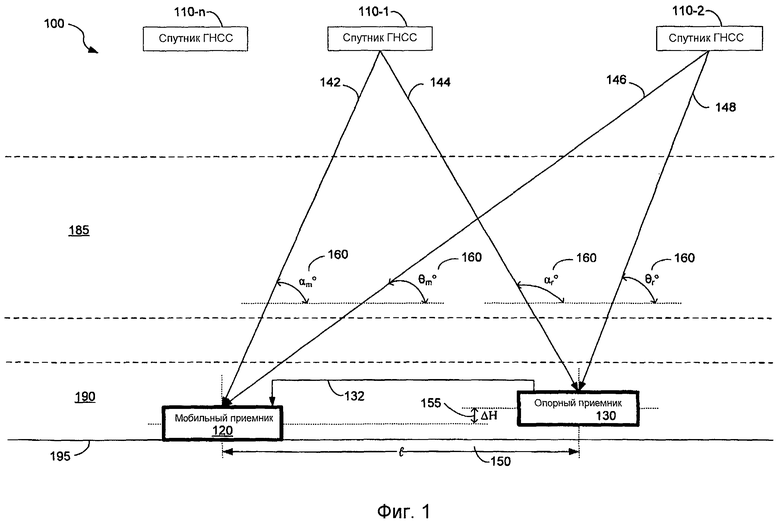
На фиг.1 показана глобальная навигационная спутниковая система 100 в соответствии с вариантом осуществления настоящего изобретения. Глобальная навигационная спутниковая система (ГНСС) включает в себя множество спутников 110-1, 110-2, …, 110-n, где n является количеством спутников в пределах видимости мобильного приемника 120 и опорного приемника 130, который обычно расположен на известном, заранее определенном месте. Множество спутников 110-n или любой один или несколько из них в дальнейшем в этом документе иногда называются спутником (спутниками) 110.
Мобильным приемником 120 выполняются измерения кода и фазы несущей частоты сигналов 142 и 146 глобальной системы позиционирования, принимаемых со спутников 110. Опорным приемником 130 выполняются измерения кода и фазы несущей частоты сигналов 144 и 148 глобальной системы позиционирования, принимаемых со спутников 110, и образуются поправки 132 к этим измерениям, основанные по меньшей мере частично на предварительно определенном местоположении опорного приемника. Затем поправки 132 передаются на мобильный приемник 120. Хотя в описании этого документа часто используются термины «глобальная система позиционирования» (ГСП) и «сигналы глобальной системы позиционирования» и т.п., настоящее изобретение в равной степени является применимым в других конфигурациях глобальной навигационной спутниковой системы, а сигналы со спутников глобальной навигационной системы являются применимыми в этих системах.
Длина 150 базовой линии и разность 155 высот между мобильным приемником 120 и опорным приемником 130 равны  и ΔН метров соответственно. Длина 150 базовой линии представляет горизонтальную составляющую расстояния между мобильным приемником 120 и опорным приемником 130. Что касается мобильного приемника 120, то возвышение 160 спутника для сигналов 142 и 146 глобальной системы позиционирования составляет αm° и θm° соответственно. Что касается опорного приемника 130, то возвышение 160 спутника для сигналов 144 и 148 глобальной системы позиционирования составляет αr° и θr° соответственно.
и ΔН метров соответственно. Длина 150 базовой линии представляет горизонтальную составляющую расстояния между мобильным приемником 120 и опорным приемником 130. Что касается мобильного приемника 120, то возвышение 160 спутника для сигналов 142 и 146 глобальной системы позиционирования составляет αm° и θm° соответственно. Что касается опорного приемника 130, то возвышение 160 спутника для сигналов 144 и 148 глобальной системы позиционирования составляет αr° и θr° соответственно.
Сигналы 142, 144, 146, 148 глобальной системы позиционирования передаются спутниками 110 через ионосферу 185 и тропосферу 190 Земли.
Тропосфера 190 простирается от земной поверхности 195 до высоты около 16 км и состоит из сухих газов и водяных паров. Сигналы 142, 144, 146, 148 глобальной системы позиционирования преломляются тропосферой 190. Величина тропосферной задержки зависит от угла 160 возвышения спутника (от приемника до спутника). Тропосферная задержка равна приблизительно 2,3 м по зенитному направлению (угол возвышения 90°) и возрастает сверх 25 м для угла 160 возвышения, составляющего 5°. Сухой компонент можно моделировать с высокой точностью, но компонент с небольшой влажностью моделировать намного труднее. Дифференциальная тропосферная задержка, преимущественно по причине влажного компонента, обычно изменяется от около 0,2 до около 0,4 частей на миллион длины 150 базовой линии. Пространственные и временные характеристики остаточной тропосферной задержки можно описать вероятностными законами или статистическими моделями. В таком случае влияния тропосферы на распространение радиоволн можно прогнозировать по изменяющимся пространственным размерностям и временным масштабам в соответствии с заданной функцией плотности вероятности или стохастически в значениях пространственной и временной корреляции флуктуаций. В одном варианте осуществления остаточная тропосферная задержка может рассматриваться как процесс Гаусса-Маркова первого порядка.
Ионосфера 185 начинается с около 50 км над земной поверхностью 195 и продолжается до высоты 1000 км или выше. Солнечное излучение в ионосфере 185 вызывает ионизацию атомов, так что свободные электроны существуют в достаточных количествах, чтобы существенно влиять на распространение радиоволн. Ионосфера 185 создает набег фазы несущей, который обуславливает уменьшение значений измерений фазы несущей, но задерживает во времени кодовую модуляцию, что приводит к повышению значений измерений кода. Величина ионосферной задержки зависит от частоты сигнала и от действия солнечного излучения. Поэтому ионосферная задержка различается для дневного времени и ночного времени и от одного сезона к другому. Днем ионосферная задержка обычно достигает первого максимума приблизительно в 14:00 местного времени, второго максимума приблизительно в 22:00 местного времени и спадает до минимума непосредственно перед восходом солнца. В экстремальных ситуациях ионосферная задержка может достигать 15 м по зенитному направлению и быть больше 200 м при возвышениях, близких к горизонту. Обычно ионосфера является источником наибольшей погрешности в случае дифференциальной обработки, и задержка изменяется от одной части на миллион длины 150 базовой линии во время периодов низкой ионосферной активности на средних широтах до более, чем 10 частей на миллион на низких геомагнитных широтах в середине дня. Спутники глобальной системы позиционирования широковещательно передают в реальном времени поправочные данные (например, коэффициенты Клобучара), которые позволяют в одночастотных приемниках удалять, усреднять около 50% эффектов ионосферной рефракции.
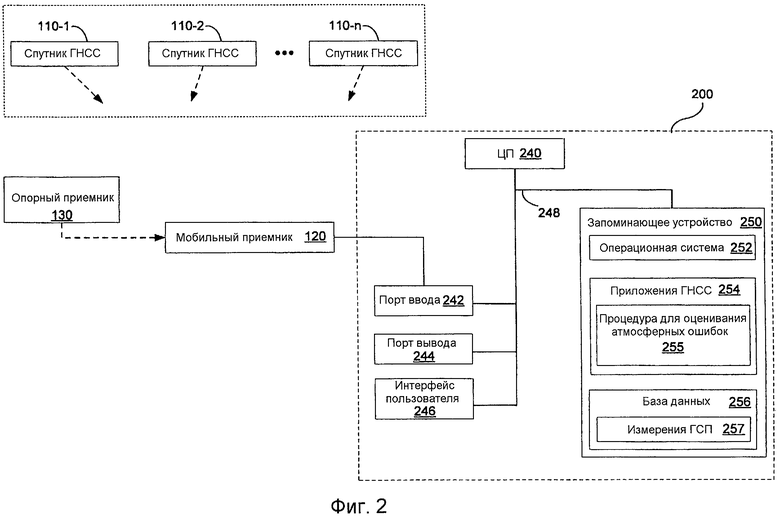
На фиг.2 показана компьютерная система 200, которая может быть использована для осуществления способа уменьшения атмосферных ошибок в соответствии с одним осуществлением настоящего изобретения. Вычислительная система 200 связана с мобильным приемником 120, с которого на вычислительную систему 200 поступают измерения кода глобальной системы позиционирования и фазы несущей, основанные на сигналах спутников.
В некоторых вариантах осуществления мобильный приемник 120 и вычислительная система 200 объединены в одно устройство внутри одного корпуса, такое как портативное, переносное или даже носимое устройство отслеживания местоположения или установленная на транспортном средстве или иная мобильная система определения местоположения и/или навигации. В других вариантах осуществления мобильный приемник 120 и компьютерная система 200 не объединены в одно устройство.
Как показано на фиг.2, компьютерная система 200 включает в себя центральный блок 240 обработки (ЦП), запоминающее устройство (ЗУ) 250, порт 242 ввода, порт 244 вывода и (при желании) интерфейс 246 пользователя, соединенные друг с другом одной или несколькими коммуникационными шинами 248. Запоминающее устройство 250 может включать в себя быстродействующее оперативное запоминающее устройство и может включать в себя энергонезависимое запоминающее устройство большой емкости, такое как одно или несколько запоминающих устройств на магнитном диске, запоминающие устройства на оптическом диске, устройства флэш-памяти или другие энергонезависимые полупроводниковые запоминающие устройства. Предпочтительно, чтобы в запоминающем устройстве 250 сохранялись операционная система 252, база 256 данных и прикладные процедуры 254 ГНСС. Прикладные процедуры ГНСС могут включать в себя процедуры 255 для реализации способа снижения атмосферных ошибок в соответствии с некоторыми осуществлениями настоящего изобретения, описанными более подробно ниже. Операционная система 252 и прикладные программы и процедуры 254 и 255, сохраняемые в запоминающем устройстве 250, выполняются ЦП 240 компьютерной системы 200. Предпочтительно, чтобы в запоминающем устройстве 250 также сохранялись данные структур, используемых во время выполнения прикладных процедур 254 и 255 ГНСС, включая измерения 257 кода глобальной системы позиционирования и/или фазы несущей, а также данные других структур, рассмотренных в этом документе.
Порт 242 ввода используется для приема данных от мобильного приемника 120 и порт 244 вывода используется для вывода данных и/или результатов вычислений. Кроме того, данные и результаты вычислений могут быть показаны на экране дисплейного устройства интерфейса 246 пользователя.
На фиг.3А и 3В показан способ 300 навигации, который включает в себя действия по уменьшению атмосферных ошибок в измерениях кода и фазы несущей частоты, основанных на сигналах, принимаемых со спутников. Хотя интерпретация фильтров Калмана находится за пределами объема этого документа, вычислительная система 200 обычно включает фильтр Калмана для обновления положения и других аспектов состояния пользовательского приемника 120 глобальной системы позиционирования, также называемого состоянием фильтра Калмана. Фактически состояние фильтра Калмана включает в себя много состояний, каждое из которых представляет аспект местоположения GPS-приемника (например, X, Y и Z или широту, долготу и зенитные составляющие местоположения) или движения (например, скорость и/или ускорение), или состояние вычислительного процесса, который используется в фильтре Кальмана.
Фильтр Калмана обычно представляет собой процедуру или набор процедур, выполняемых процессором. Фильтр Калмана выполняется неоднократно (например, один раз в секунду), каждый раз с использованием новых измерений кода (также называемых измерениями псевдодальности) и измерений фазы несущей, для обновления состояния фильтра Калмана. Хотя уравнения, используемые для фильтра Калмана, являются сложными, фильтры Калмана широко используют в области навигации, и по этой причине только те аспекты фильтров Калмана, которые имеют отношение к потребностям настоящего изобретения, будут рассматриваться во всех подробностях. Следует подчеркнуть, что хотя фильтры Калмана широко используют в GPS-приемниках и в других навигационных системах, многие аспекты этих фильтров Калмана меняются от одной реализации к другой. Например, фильтры Калмана, используемые в некоторых GPS-приемниках, могут включать в себя состояния, которые не включаются в другие фильтры Калмана, или могут использовать несколько иные уравнения по сравнению с уравнениями, используемыми для других фильтров Калмана.
Аспект фильтров Калмана, который имеет отношение к настоящему рассмотрению, заключается во включении значений в состояние фильтра Калмана для представления тропосферной задержки и ионосферной задержки сигналов, принимаемых со спутников в пределах видимости, и статус этих значений. Кроме того, состояние фильтра Калмана может включать в себя значения неоднозначности для измерений фазы несущей со множества спутников.
Как установлено выше в отношении фиг.1, сигналы принимают со спутников 110 и поправки 132 принимают с опорного приемника 130. Действие 310 включает в себя получение измерений кода и фазы несущей. Результаты двойных разностных измерений кода и фазы несущей формируют 320 для исключения многих из систематических ошибок, имеющихся в измерениях глобальной системы позиционирования. Наблюдаемые величины кода и фазы несущей при двойных разностных измерениях в единицах метров можно образовать в виде:


где нижний индекс i означает частоту, то есть L1, L2 или L5; Pi и ϕi представляют собой наблюдаемые величины кода и фазы несущей соответственно; ∇Δ является оператором двойной разности; ρ представляет собой геометрическое расстояние от спутника до приемника; ∇ΔТ является остаточной дифференциальной тропосферной систематической ошибкой, которая может быть представлена в виде функции остаточной зенитной тропосферной задержки совместно с отображающей функцией, которая описывает зависимость от угла возвышения; ∇ΔI представляет собой двойную дифференциальную ионосферную систематическую ошибку; ∇ΔО является поправкой на влияние двойной дифференциальной орбитальной задержки, которая может быть получена из сетевой системы с режимом кинематики в реальном времени (RTK) или территориальной системы дифференциальных поправок (WAAS), такой как StarRire™ Network от Navcom Technology Inc.; λi и fi представляют собой длину волны и частоту i-й несущей частоты соответственно; ∇ΔNi является целочисленной неоднозначностью двойной разности для i-й несущей частоты; и члены  и
и  представляют кодовые и фазовые ошибки соответственно, в том числе обусловленные случайными шумами приемников, и любые немоделируемые систематические ошибки, такие как ошибки вследствие многолучевого распространения, остаточные орбитальные ошибки и т.д.
представляют кодовые и фазовые ошибки соответственно, в том числе обусловленные случайными шумами приемников, и любые немоделируемые систематические ошибки, такие как ошибки вследствие многолучевого распространения, остаточные орбитальные ошибки и т.д.
Линеаризацию двойных разностных наблюдений фазы несущей можно представить следующей системой уравнений:

где V является вектором невязки после подбора в эпоху k; Z представляет собой невязки до подбора, которые основаны на измерениях двойной разности для текущей эпохи; Н является матрицей плана; и Х представляет собой оцененный вектор состояния, включающий в себя три составляющие местоположения, остаточные ионосферные и тропосферные систематические ошибки и двойные или тройные неоднозначности частоты. Значения оцененного вектора Х состояния сохраняются в состояниях фильтра Калмана.
В одном варианте осуществления фильтр Калмана включает в себя множество состояний, включая, но без ограничения ими: три состояния местоположения, при этом каждое соответствует отличающемуся направлению или размерности; состояние остаточной тропосферной задержки; и N-1 состояний остаточной ионосферной задержки. При желании состояние фильтра Калмана может включать в себя три состояния скорости, при этом каждое соответствует отличающемуся направлению или размерности, и при желании может включать в себя три состояния ускорения, при этом каждое соответствует отличающемуся направлению или размерности. В некоторых вариантах осуществления состояние фильтра Калмана включает в себя N-1 двойных разностных состояний неоднозначности сигнала L1 и N-1 двойных разностных состояний неоднозначности сигнала L2, где N является количеством спутников, по которым получают измерения.
В одном варианте осуществления получают проекции фильтра Калмана и обновления состояний. Если предполагается, что оценками фильтра Калмана после (k-1) эпох являются  с дисперсией
с дисперсией  , то прогнозированный вектор состояния в эпоху k может быть получен из уравнений (4) и (5) состояния:
, то прогнозированный вектор состояния в эпоху k может быть получен из уравнений (4) и (5) состояния:

где  является прогнозированным вектором состояния фильтра Калмана в эпоху k, предсказанным на основании состояния фильтра Калмана в эпоху (k-1);
является прогнозированным вектором состояния фильтра Калмана в эпоху k, предсказанным на основании состояния фильтра Калмана в эпоху (k-1);  представляет собой матрицу переходов, которая связывает Xk-1 с Xk; и Wk является динамической матрицей. Wk включает в себя значения остаточной тропосферной задержки, остаточной ионосферной задержки и значение неоднозначности.
представляет собой матрицу переходов, которая связывает Xk-1 с Xk; и Wk является динамической матрицей. Wk включает в себя значения остаточной тропосферной задержки, остаточной ионосферной задержки и значение неоднозначности.
При использовании векторов измерения в эпоху k обновленное состояние и матрица дисперсий выражаются с помощью следующих уравнений:

где K представляет собой матрицу усиления; R является ковариацией дисперсии для наблюдаемых величин; и I представляет собой единичную матрицу.
Как показано на фиг.3А, способ 300 включает в себя оценивание 330 атмосферных ошибок в измерениях кода и фазы несущей, которое может включать в себя два или большее количество действий, описанных далее.
Оценивают 340 остаточную тропосферную задержку. В одном осуществлении это включает в себя представление тропосферной задержки в виде остаточной тропосферной зенитной задержки и отображающей функции 342 для получения задержки при любом заданном угле 160 возвышения спутника. Все отклонения атмосферных условий от стандартных условий включают в остаточную тропосферную зенитную задержку (RTZD). После применения модели тропосферной задержки остаточная двойная дифференциальная тропосферная задержка может быть аппроксимирована как:

где εp и εq представляют собой средние углы возвышения спутника относительно мобильного приемника 120 и опорного приемника 130 для спутников p и q соответственно; спутник q является спутником 110 на самой большой высоте; и спутник p является любым другим спутником 110, с которого приемник принимает измеряемые сигналы. В одном осуществлении для всех видимых спутников используют единственную оценку остаточной тропосферной зенитной задержки. Значение остаточной тропосферной зенитной задержки является составляющей состояния фильтра Калмана (то есть составляющей тропосферной задержки) и обновляется в каждую эпоху с помощью функции обновления состояния Калмана. Поэтому не имеет значения, какое возвышение 160 имеет спутник, ∇ΔТ в уравнениях (1) и (2) будет масштабироваться показателем отображающей функции мобильного приемника 120 и местоположением опорного приемника 130 с использованием уравнения (9).
В одном варианте осуществления оценивание 340 остаточной тропосферной задержки включает в себя моделирование остаточной тропосферной задержки (например, остаточной тропосферной зенитной задержки) в качестве состояния в фильтре Калмана и использование функции обновления состояния, которая включает в себя по меньшей мере один, зависящий от длины 150 базовой линии фактор (то есть соответствующий расстоянию между опорным приемником и мобильным приемником, местоположение которого определяют). В некоторых вариантах осуществления оценивание остаточной тропосферной задержки 340 включает в себя использование функции обновления состояния с по меньшей мере одним фактором, основанным на длине 150 базовой линии и разности 155 высот между опорным и мобильным приемниками 344. В некоторых из этих осуществлений матрица ϕk,k-1 переходов и динамическая модель Qk имеют вид:


где 1/βтроп является временем корреляции влажного компонента тропосферы, которое обычно составляет от 600 до 1800 с;  представляет собой дисперсию влажного компонента тропосферы и является функцией длины
представляет собой дисперсию влажного компонента тропосферы и является функцией длины  базовой линии и разности ΔН высот;
базовой линии и разности ΔН высот;  является дисперсией для горизонтального влажного компонента, обычно составляет от 0,1 частей на миллион до 0,5 частей на миллион длины
является дисперсией для горизонтального влажного компонента, обычно составляет от 0,1 частей на миллион до 0,5 частей на миллион длины  базовой линии; и
базовой линии; и  является дисперсией для вертикального влажного компонента, обычно составляет от 1 части на миллион до 10 частей на миллион длины
является дисперсией для вертикального влажного компонента, обычно составляет от 1 части на миллион до 10 частей на миллион длины  базовой линии. Qk и ϕk,k-1 представляют собой доли остаточной тропосферной задержки в Wk из уравнения (5) и в Φk,k-1 из уравнения (4) соответственно. В некоторых осуществлениях
базовой линии. Qk и ϕk,k-1 представляют собой доли остаточной тропосферной задержки в Wk из уравнения (5) и в Φk,k-1 из уравнения (4) соответственно. В некоторых осуществлениях  придают фиксированное значение, такое как 0,1 частей на миллион, и 1/βтроп придают фиксированное значение, такое как 600 с. В некоторых других осуществлениях значения
придают фиксированное значение, такое как 0,1 частей на миллион, и 1/βтроп придают фиксированное значение, такое как 600 с. В некоторых других осуществлениях значения  и 1/βтроп вычисляют на основании информации, доступной для мобильного приемника, такой как длина базовой линии между мобильным приемником и опорным приемником. В некоторых осуществлениях значения и 1/βтроп получают из просмотровой таблицы, используя длину базовой линии между мобильным приемником и опорным приемником (или значение, связанное с длиной базовой линии) в качестве указателя в просмотровой таблице.
и 1/βтроп вычисляют на основании информации, доступной для мобильного приемника, такой как длина базовой линии между мобильным приемником и опорным приемником. В некоторых осуществлениях значения и 1/βтроп получают из просмотровой таблицы, используя длину базовой линии между мобильным приемником и опорным приемником (или значение, связанное с длиной базовой линии) в качестве указателя в просмотровой таблице.
Оценивают 350 по меньшей мере одну остаточную ионосферную задержку. В одном осуществлении после того, как результаты измерений кода и фазы несущей корректируют с помощью передаваемой ионосферной модели и вычисляют последовательные разности с учетом поправок 132 от опорного приемника 130, остающуюся ионосферную задержку оценивают в фильтре Калмана как элемент вектора состояния. В одном варианте осуществления оценивание 350 остаточной ионосферной задержки включает в себя моделирование остаточной ионосферной задержки в качестве состояния в фильтре Калмана и использование функции обновления состояния, которая включает в себя по меньшей мере один зависящий от длины 150 базовой линии фактор. В другом варианте осуществления используют 354 функцию обновления состояния с по меньшей мере одним фактором, основанным на локальном времени и активности ионосферы. В этом осуществлении матрица ϕ k-1,k переходов и динамическая модель Q k функции обновления состояния имеют вид:

где 1/βион представляет собой время корреляции дифференциальной ионосферной систематической ошибки, обычно от 30 до 300 с; σн-ион и σв-ион представляют дисперсию дифференциальных наклонных и вертикальных ионосферных систематических ошибок, и σв-ион является функцией локального времени и активности ионосферы;  является длиной 150 базовой линии; Е представляет собой возвышение 160 спутника; Н является высотой ионосферного слоя 185, которая может предполагаться, например, равной 350 км; и R, средний радиус земли, составляет 6371 км. σв-ион обычно изменяется от 0,5 частей на миллион до 2 частей на миллион длины 150 базовой линии. Qk и ϕk,k-1 представляют собой доли остаточной ионосферной задержки в Wk из уравнения (5) и в Φk,k-1 из уравнения (4) соответственно. В некоторых вариантах осуществления σв-ион придают фиксированное значение, такое как 1 часть на миллион и 1/βион придают фиксированное значение, такое как 30 с. В некоторых осуществлениях значения σв-ион и 1/βион вычисляют на основании информации, имеющейся в мобильном приемнике, такой как локальное время, вычисленное на основании предварительного решения глобальной системы позиционирования с использованием гринвичского среднего времени или системной шкалы времени глобальной системы позиционирования и вычисленной долготы приемника. В некоторых осуществлениях значения
является длиной 150 базовой линии; Е представляет собой возвышение 160 спутника; Н является высотой ионосферного слоя 185, которая может предполагаться, например, равной 350 км; и R, средний радиус земли, составляет 6371 км. σв-ион обычно изменяется от 0,5 частей на миллион до 2 частей на миллион длины 150 базовой линии. Qk и ϕk,k-1 представляют собой доли остаточной ионосферной задержки в Wk из уравнения (5) и в Φk,k-1 из уравнения (4) соответственно. В некоторых вариантах осуществления σв-ион придают фиксированное значение, такое как 1 часть на миллион и 1/βион придают фиксированное значение, такое как 30 с. В некоторых осуществлениях значения σв-ион и 1/βион вычисляют на основании информации, имеющейся в мобильном приемнике, такой как локальное время, вычисленное на основании предварительного решения глобальной системы позиционирования с использованием гринвичского среднего времени или системной шкалы времени глобальной системы позиционирования и вычисленной долготы приемника. В некоторых осуществлениях значения  и 1/βтроп получают из просмотровой таблицы.
и 1/βтроп получают из просмотровой таблицы.
В отличие от остаточной тропосферной систематической ошибки остаточную тропосферную задержку оценивают для каждого спутника за исключением опорного спутника 352. Поэтому должно быть N-1 оценок остаточной ионосферной систематической ошибки и N-1 значений состояния фильтра Калмана, представляющих N-1 оценок остаточной ионосферной систематической ошибки.
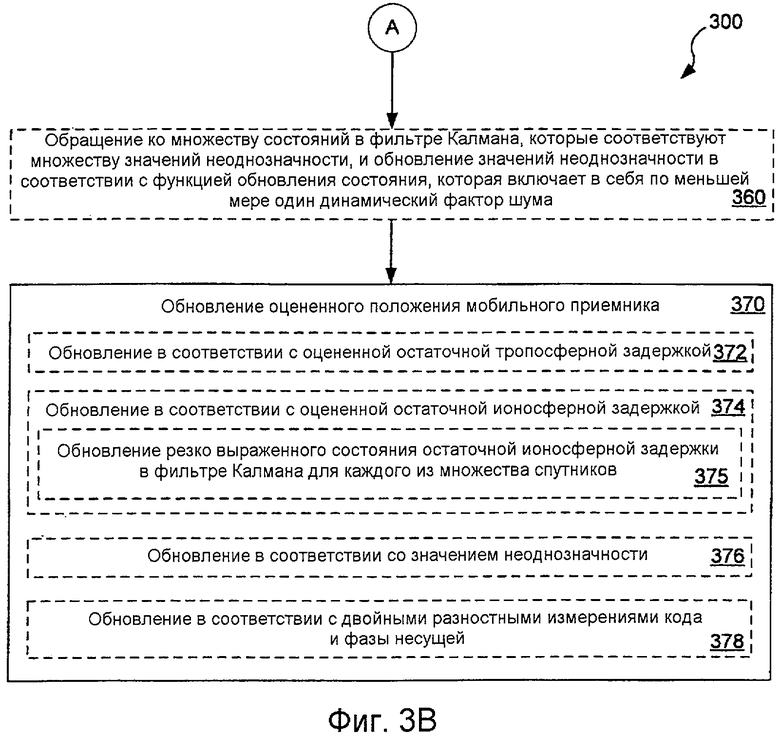
В некоторых вариантах осуществления способ также включает в себя обращение 360 ко множеству состояний в фильтре Калмана, соответствующих множеству значений неоднозначности. Затем эти состояния обновляют в соответствии с функцией обновления состояния, которая включает в себя по меньшей мере один динамический фактор шума. Матрица ϕ k-1,k и динамическая модель Q k функции обновления состояния имеют вид:


где δ amb небольшое значение динамического шума, такое как 0,001 цикла. Q k и ϕ k,k-1 представляют доли значения неоднозначности в W k из уравнения (5) и в Φk,k-1 из уравнения (4) соответственно.
В некоторых вариантах осуществления способ 300 навигации включает в себя обновление 370 оцененного положения мобильного приемника 120. Обычно оцененное положение обновляют 378 в соответствии с результатами двойных разностных измерений кода и фазы несущей, а также в соответствии с другой информацией, доступной для мобильного приемника (или для вычислительной системы, которая определяет местоположение мобильного приемника). В некоторых осуществлениях оцененное положение обновляют 372 в соответствии с оцененной остаточной тропосферной задержкой. В некоторых осуществлениях оцененное положение обновляют 374 в соответствии с оцененной остаточной ионосферной задержкой. В некоторых из этих осуществлений резко выраженное состояние остаточной ионосферной задержки в фильтре Калмана обновляют 375 для каждого из множества спутников 110 (например, для всех спутников в пределах видимости за исключением одного, расположенного наиболее высоко на небе). В некоторых осуществлениях оцененное положение обновляют 376 в соответствии со значениями неоднозначности в состоянии фильтра Калмана.
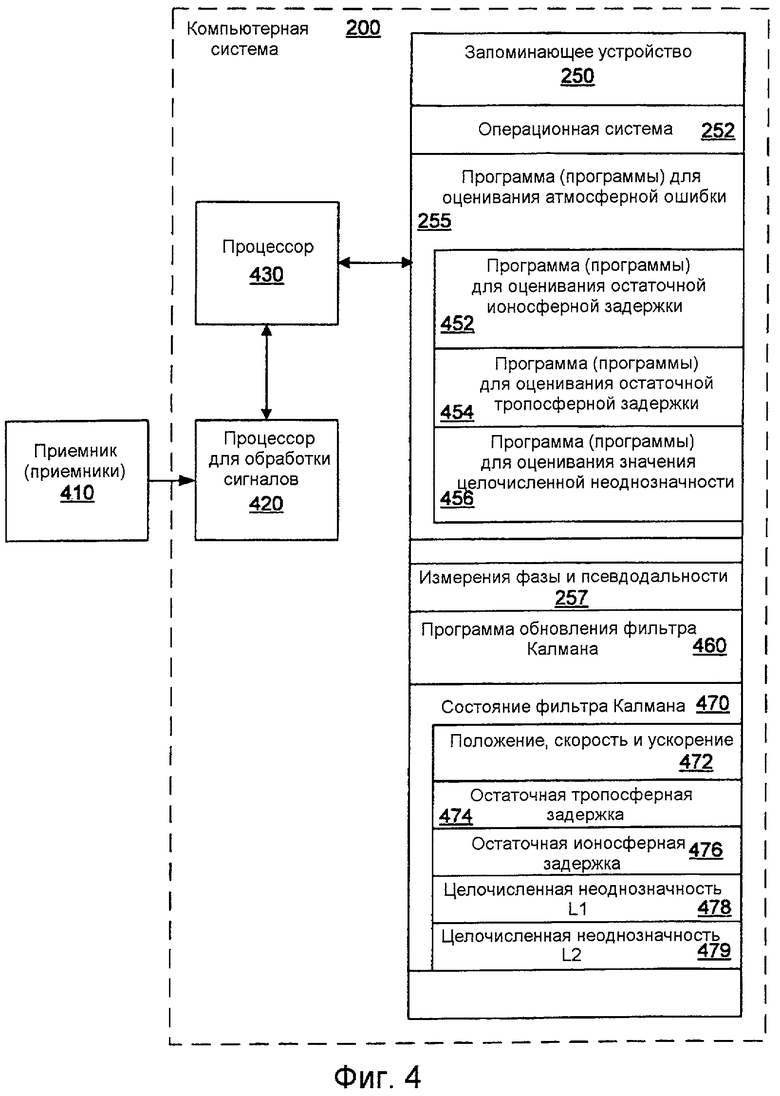
На фиг.4 показан вариант осуществления компьютерной системы 200. Компьютерная система 200 включает в себя процессор 420 для обработки сигналов, по меньшей мере один процессор 430 и запоминающее устройство 250. Запоминающее устройство 250, которое может включать в себя быстродействующее оперативное запоминающее устройство и также может включать в себя энергонезависимое запоминающее устройство, такое как одно или несколько запоминающих устройств на магнитных дисках, электронно-перепрограммируемое постоянное запоминающее устройство и/или флэш-память, включает в себя операционную систему 252, измерения 257 кода и фазы несущей, программу 460 обновления фильтра Калмана, состояние 470 фильтра Калмана и по меньшей мере один программный модуль 255 оценивания атмосферной ошибки, выполняемого процессором 430. В состоянии 470 фильтра Калмана сохраняется множество значений состояний: положение 472, значение 474 остаточной тропосферной задержки, множество (например, N-1) значений 476 остаточной ионосферной задержки, множество (например, N-1) значений 478 целочисленной неоднозначности сигнала L1 и множество (например, N-1) значений 479 целочисленной неоднозначности сигнала L2, каждое из которых рассмотрено выше. По меньшей мере один программный модуль 255 оценивания атмосферной ошибки включает в себя по меньшей мере одну программу 552 оценивания остаточной ионосферной ошибки, по меньшей мере одну программу 554 оценивания остаточной тропосферной задержки и по меньшей мере одну программу 556 оценивания значений целочисленной неоднозначности.
В некоторых вариантах осуществления может быть больше одного процессора 430. В других осуществлениях компьютерная система 200 может включать в себя специализированную интегральную схему, которая выполняет некоторые или все функции программного модуля 255 оценивания атмосферной ошибки.
В некоторых вариантах осуществления компьютерная система 200 связана с приемником 410, таким как мобильный приемник 120 (фиг.1). В других осуществлениях компьютерная система 200 и приемник 410 объединены в одном устройстве.
Приведенное выше описание было изложено с целью пояснения применительно к конкретным осуществлениям. Однако иллюстративные рассмотрения, приведенные выше, не предполагаются исчерпывающими или ограничивающими изобретение точными раскрытыми осуществлениями. В свете изложенных выше идей возможны многочисленные модификации и варианты. Осуществления были выбраны и описаны для наилучшего пояснения принципов изобретения и его практических применений с тем, чтобы дать возможность специалистам в данной области техники наилучшим образом использовать изобретение и различные осуществления с различными модификациями, пригодными для конкретного предполагаемого использования.
Изобретение относится к области радиотехники, а именно к уменьшению атмосферных ошибок в измерениях кода и фазы несущей, основанных на сигналах, принимаемых со множества спутников, и может быть использовано в глобальной навигационной спутниковой системе. Технический результат заключается в ограничении зависящих от расстояния ошибок средств режима кинематики реального времени глобальной системы позиционирования путем оценки источников атмосферной ошибки. Для этого остаточную тропосферную задержку и множество остаточных ионосферных задержек моделируют (блок 340) как состояния в фильтре Калмана. Функции обновления состояния фильтра Калмана включают в себя по меньшей мере один зависящий от длины базовой линии фактор, при этом длина базовой линии является расстоянием между опорным приемником и мобильным приемником (блок 340). Множество значений неоднозначности моделируют как состояния в фильтре Калмана. Функция обновления состояния фильтра Калмана для состояний неоднозначности включает в себя динамический фактор шума (блок 360 на фиг.3В). Оцененное положение мобильного приемника обновляют (блок 370) в соответствии с остаточной тропосферной задержкой (блок 372), множеством остаточных ионосферных задержек (блок 374) и/или множеством значений неоднозначности (блок 376). 4 н. и 22 з.п. ф-лы, 5 ил.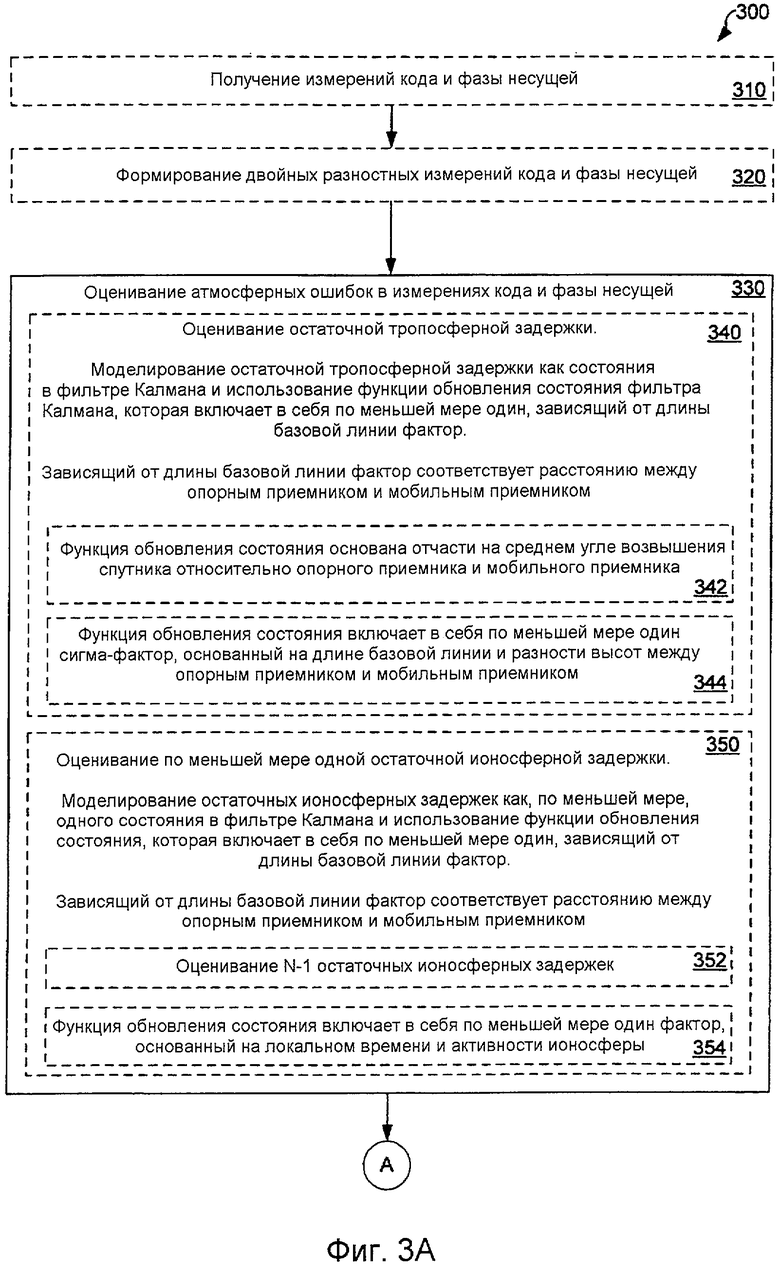
1. Способ уменьшения атмосферных ошибок в измерениях кода и фазы несущей, основанных на сигналах, принимаемых со множества спутников в глобальной навигационной спутниковой системе, и этот способ содержит этапы, на которых: оценивают остаточную тропосферную задержку, остаточную тропосферную задержку моделируют как состояние в фильтре Калмана, и при этом функция обновления состояния фильтра Калмана для остаточной тропосферной задержки включает в себя, по меньшей мере, один, зависящий от длины базовой линии фактор, при этом, по меньшей мере, один зависящий от длины базовой линии фактор соответствует длине базовой линии между опорным приемником и мобильным приемником; и обновляют оцененное положение мобильного приемника в соответствии с оцененной остаточной тропосферной задержкой и измерениями кода и фазы несущей, при этом оцененное положение мобильного приемника моделируют как состояния координат в фильтре Калмана, причем функция обновления состояния фильтра Калмана включает в себя динамическую модель Qk для остаточной тропосферной задержки, заданную следующим образом:
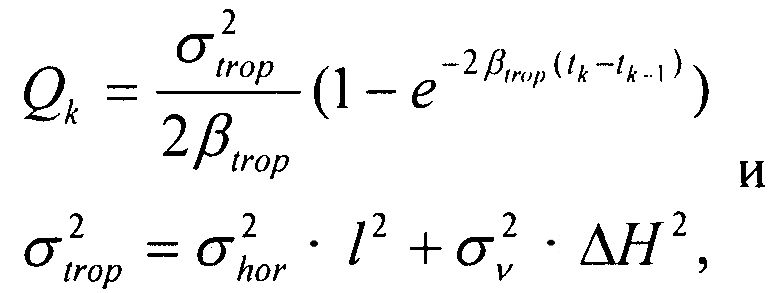
где l/βtrop содержит время корреляции влажного компонента тропосферы остаточной тропосферной задержки;  содержит дисперсию влажного компонента тропосферы остаточной тропосферной задержки и является функцией длины l базовой линии и разности ΔН высот между опорным приемником и мобильным приемником;
содержит дисперсию влажного компонента тропосферы остаточной тропосферной задержки и является функцией длины l базовой линии и разности ΔН высот между опорным приемником и мобильным приемником;  содержит дисперсию для горизонтального влажного компонента остаточной тропосферной задержки, и
содержит дисперсию для горизонтального влажного компонента остаточной тропосферной задержки, и  содержит дисперсию для вертикального влажного компонента остаточной тропосферной задержки.
содержит дисперсию для вертикального влажного компонента остаточной тропосферной задержки.
2. Способ по п.1, в котором получают измерения кода и фазы несущей на основании сигналов, принимаемых со множества спутников, в опорном приемнике и мобильном приемнике; вычисляют значения двойных разностей на основании полученных измерений для формирования двойных разностных измерений кода и фазы несущей; и обновляют оцененное положение мобильного приемника в соответствии с оцененной остаточной тропосферной задержкой и результатами двойных разностных измерений кода и фазы несущей.
3. Способ по п.1, в котором фильтр Калмана включает в себя множество состояний, в том числе одно состояние, которое масштабирует остаточную тропосферную задержку.
4. Способ по п.1, в котором функция обновления состояния фильтра Калмана для остаточной тропосферной задержки основана отчасти на среднем угле возвышения спутника относительно опорного приемника и мобильного приемника.
5. Способ по п.1, в котором функция обновления состояния фильтра Калмана для остаточной тропосферной задержки включает в себя, по меньшей мере, один фактор, основанный на длине базовой линии и разности высот между опорным приемником и мобильным приемником.
6. Способ по п.1, в котором дополнительно: оценивают, по меньшей мере, одну остаточную ионосферную задержку, причем, по меньшей мере, одну остаточную ионосферную задержку моделируют как, по меньшей мере, одно состояние в фильтре Калмана, и при этом функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор; и обновляют оцененное положение мобильного приемника в соответствии с, по меньшей мере, одной оцененной остаточной ионосферной задержкой и измерениями кода и фазы несущей.
7. Способ по п.6, в котором получают измерения кода и фазы несущей на основании сигналов, принимаемых со множества спутников, в опорном приемнике и мобильном приемнике; вычисляют значения двойных разностей на основании полученных измерений для формирования двойных разностных измерений кода и фазы несущей; и обновляют оцененное положение мобильного приемника в соответствии с оцененной остаточной тропосферной задержкой, по меньшей мере, одной оцененной остаточной ионосферной задержкой и результатами двойных разностных измерений кода и фазы несущей.
8. Способ по п.6, в котором обновление включает в себя обновление индивидуального состояния остаточной ионосферной задержки в фильтре Калмана для каждого из множества спутников.
9. Способ по п.6, в котором функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один фактор, основанный на локальном времени и активности ионосферы.
10. Способ по п.1, в котором дополнительно: оценивают N-1 остаточных ионосферных задержек, N-1 остаточных ионосферных задержек моделируют как N-1 состояний в фильтре Калмана, и при этом функция обновления состояния фильтра Калмана для N-1 остаточных ионосферных задержек включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор для каждого из N-1 состояний, при этом N представляет собой количество спутников, с которых принимают сигналы и по которым выполняют измерения кода и фазы несущей; и обновляют оцененное положение мобильного приемника в соответствии с N-1 оцененными остаточными ионосферными задержками и измерениями кода и фазы несущей.
11. Способ по п.10, в котором получают измерения кода и фазы несущей на основании сигналов, принимаемых со множества спутников, в опорном приемнике и мобильном приемнике; вычисляют значения двойных разностей на основании полученных измерений для формирования двойных разностных измерений кода и фазы несущей; и обновляют оцененное положение мобильного приемника в соответствии с оцененной остаточной тропосферной задержкой, оцененными N-1 остаточными ионосферными задержками и двойными разностными измерениями кода и фазы несущей.
12. Способ по п.10, в котором обновление включает в себя обновление индивидуального состояния остаточной ионосферной задержки в фильтре Калмана для каждого из множества спутников.
13. Способ по п.10, в котором функция обновления состояния фильтра Калмана для N-1 остаточных ионосферных задержек включает в себя, по меньшей мере, один фактор, основанный на локальном времени и активности ионосферы.
14. Способ уменьшения атмосферных ошибок в измерениях кода и фазы несущей, основанных на сигналах, принимаемых со множества спутников в глобальной навигационной спутниковой системе, и этот способ содержит этапы, на которых: оценивают, по меньшей мере, одну остаточную ионосферную задержку, по меньшей мере, одну остаточную ионосферную задержку моделируют как, по меньшей мере, одно состояние в фильтре Калмана, и при этом функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор, при этом, по меньшей мере, один зависящий от длины базовой линии фактор соответствует расстоянию между опорным приемником и мобильным приемником; и обновляют оцененное положение мобильного приемника в соответствии с, по меньшей мере, одной оцененной остаточной ионосферной задержкой и измерениями кода и фазы несущей, при этом оцененное положение мобильного приемника моделируют как состояние в фильтре Калмана.
15. Способ по п.14, в котором получают измерения кода и фазы несущей на основании сигналов, принимаемых со множества спутников, в опорном приемнике и мобильном приемнике; вычисляют значения двойных разностей на основании полученных измерений для формирования двойных разностных измерений кода и фазы несущей; и обновляют оцененное положение мобильного приемника в соответствии с, по меньшей мере, одной оцененной остаточной ионосферной задержкой и двойными разностными измерениями кода и фазы несущей.
16. Способ по п.14, в котором обновление включает в себя обновление индивидуального состояния остаточной ионосферной задержки в фильтре Калмана для каждого из множества спутников.
17. Способ по п.14, в котором функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор и зависящий от возвышения спутника фактор.
18. Способ по п.14, в котором функция обновления состояния фильтра Калмана включает в себя динамическую модель Qk для остаточной тропосферной задержки, заданную следующим образом:
где l/βtrop является временем корреляции влажного компонента тропосферы остаточной тропосферной задержки; является дисперсией влажного компонента тропосферы остаточной тропосферной задержки и является функцией длины l базовой линии и разности ΔН высот между опорным приемником и мобильным приемником; является дисперсией для горизонтального влажного компонента остаточной тропосферной задержки, и является дисперсией для вертикального влажного компонента остаточной тропосферной задержки.
19. Способ уменьшения атмосферных ошибок в измерениях кода и фазы несущей, основанных на сигналах, принимаемых со множества спутников в глобальной навигационной спутниковой системе, и этот способ содержит этапы, на которых: оценивают N-1 остаточных ионосферных задержек, N-1 остаточных ионосферных задержек моделируют как N-1 состояний в фильтре Калмана, и при этом функция обновления состояния фильтра Калмана для N-1 остаточных ионосферных задержек включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор для каждого из N-1 состояний, при этом N представляет собой количество спутников, с которых принимают сигналы и по которым выполняют измерения кода и фазы несущей, и при этом, по меньшей мере, один зависящий от длины базовой линии фактор соответствует расстоянию между опорным приемником и мобильным приемником; и обновляют оцененное положение мобильного приемника в соответствии с N-1 оцененными остаточными ионосферными задержками и измерениями кода и фазы несущей, при этом оцененное положение мобильного приемника моделируют как состояние в фильтре Калмана.
20. Способ по п.19, в котором получают измерения кода и фазы несущей на основании сигналов, принимаемых со множества спутников, в опорном приемнике и мобильном приемнике; вычисляют значения двойных разностей на основании полученных измерений для формирования двойных разностных измерений кода и фазы несущей; и обновляют оцененное положение мобильного приемника в соответствии с оцененными N-1 остаточными ионосферными задержками и двойными разностными измерениями кода и фазы несущей.
21. Способ по п.19, в котором обновление включает в себя обновление индивидуального состояния остаточной ионосферной задержки в фильтре Калмана для каждого из множества спутников.
22. Способ по п.19, в котором функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор и зависящий от возвышения спутника фактор.
23. Способ по п.19, в котором функция обновления состояния фильтра Калмана включает в себя динамическую модель Qk для остаточной тропосферной задержки, заданную следующим образом:
где l/βtrop является временем корреляции влажного компонента тропосферы остаточной тропосферной задержки; является дисперсией влажного компонента тропосферы остаточной тропосферной задержки и является функцией длины l базовой линии и разности ΔН высот между опорным приемником и мобильным приемником; является дисперсией для горизонтального влажного компонента остаточной тропосферной задержки, и является дисперсией для вертикального влажного компонента остаточной тропосферной задержки.
24. Устройство для уменьшения атмосферных ошибок в измерениях кода и фазы несущей, основанных на сигналах, принимаемых со множества спутников в глобальной навигационной спутниковой системе, устройство, содержащее: мобильный приемник;
фильтр Калмана для оценки, по меньшей мере, одной остаточной ионосферной задержки, причем, по меньшей мере, одна остаточная ионосферная задержка смоделирована как, по меньшей мере, одно состояние в фильтре Калмана, и при этом функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор, причем, по меньшей мере, один зависящий от длины базовой линии фактор соответствует расстоянию между опорным приемником и мобильным приемником; и процессор для обновления оцененного положения мобильного приемника в соответствии с, по меньшей мере, одной оцененной остаточной ионосферной задержкой и измерениями кода и фазы несущей, при этом оцененное положение мобильного приемника моделировано как состояние в фильтре Калмана.
25. Устройство по п.24, в котором функция обновления состояния фильтра Калмана для, по меньшей мере, одной остаточной ионосферной задержки включает в себя, по меньшей мере, один зависящий от длины базовой линии фактор и зависящий от возвышения спутника фактор.
26. Устройство по п.24, в котором функция обновления состояния фильтра Калмана включает в себя динамическую модель Qk для остаточной тропосферной задержки, заданную следующим образом:
где l/βtrop является временем корреляции влажного компонента тропосферы остаточной тропосферной задержки; является дисперсией влажного компонента тропосферы остаточной тропосферной задержки и является функцией длины l базовой линии и разности ΔН высот между опорным приемником и мобильным приемником; является дисперсией для горизонтального влажного компонента остаточной тропосферной задержки, и является дисперсией для вертикального влажного компонента остаточной тропосферной задержки.
| Способ получения бутена-1 | 1987 |
|
SU1498745A1 |
| СПОСОБ РАЗРЕШЕНИЯ ФАЗОВЫХ НЕОДНОЗНАЧНОСТЕЙ | 2005 |
|
RU2295737C1 |
| L.Dai, D.Eslinger, T.Sharpe "Innovative Algorithms to Improve Long Range RTK Reliability and Availability", Proceedings of the 2007 National Technical Meeting of the Institute of Navigation, c.c.860-872, 24.01.2007 | |||
| ГИДРОДИНАМИЧЕСКИЙ РЕАКТОР | 2005 |
|
RU2370707C2 |

