Изобретение относится к системам управления самолетом.
Известно устройство для ограничения параметров движения самолета, содержащее датчики углов атаки, расположенные в каждом крыле самолета, задатчик критического угла атаки, блок формирования команд, включающий вычитающий элемент, и последовательно соединенные схему сравнения и усилительно-преобразующее устройство, причем выходы датчиков угла атаки подключены к входам схемы сравнения и входам вычитающего элемента, и выход задатчика критического угла атаки соединен с входом схемы сравнения.
Известно также устройство для предотвращения выхода самолета на критический угол атаки, содержащее датчик угла атаки, датчик угловой скорости рыскания, задатчики критического угла атаки и критической угловой скорости рыскания, блок сравнения и блок формирования команд на отклонение органов управления самолетом.
Однако эти устройства не обеспечивают полного использования маневренных свойств самолета и могут допустить зарождение штопора самолета.
Цель изобретения - увеличение возможности более полного использования маневренных свойств самолета с одновременным предотвращением входа самолета в штопор.
Это достигается тем, что в устройство введен датчик угла скольжения, и блок формирования команд содержит сумматор и логическое устройство, включенное между схемой сравнения и усилительно-преобразующим устройством, другие входы логического устройства соединены с выходами датчика угла скольжения, сумматора вычитающего элемента, задатчика критического угла атаки, входы сумматора подключены к выходам датчиков углов атаки.
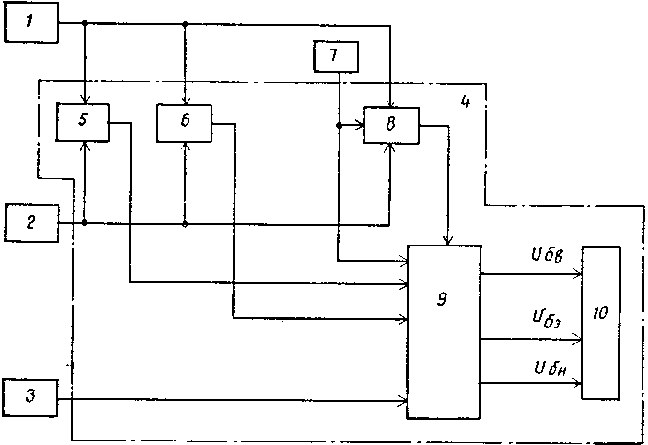
На чертеже представлена блок-схема предлагаемого устройства.
Схема содержит датчики 1,2 углов атаки, расположенные в каждом крыле самолета, датчик 3 угла скольжения, блок 4 формирования команд, сумматор 5, вычитающий элемент 6, задатчик 7 критического угла атаки, схему 8 сравнения, логическое устройство 9, усилительно-преобразующее устройство 10, сигналы на отключение руля высоты Uδв, руля направления Uδн, элеронов Uδэ.
Выходы датчиков 1,2 угла атаки подключены к входам сумматора 5, вычитающего элемента 6, схемы 8 сравнения, входы логического устройства 9 подключены к выходам сумматора 5, вычитающего элемента 6, задатчика 7, схемы 8 сравнения, датчика 3 угла скольжения, входы усилительно-преобразующего устройства 10 соединены с выходами логического устройства 9, выход задатчика 7 соединен с входом схемы 8 сравнения.
Устройство работает следующим образом.
Сумматор 5 формирует сигнал, пропорциональный значению угла атаки при отсутствии скольжения и при нулевой скорости крена самолета, в соответствии с зависимостью
αβ=0,ωx=0=  (αI+αII) , (1) где α - угол атаки самолета;
(αI+αII) , (1) где α - угол атаки самолета;
αI - сигнал датчика угла атаки, расположенного на одном крыле;
αII - сигнал датчика угла атаки, расположенном на другом крыле;
β - угол скольжения;
ωx - скорость крена самолета.
Вычитающий элемент 6 формирует сигнал, пропорциональный приращению угла атаки за счет наличия угла скольжения и скорости крена, в соответствии с зависимостью
Δαβ,ωx=  (αI+αII) , (2)
(αI+αII) , (2)
Логическое устройство 9 формирует сигнал приращения угла атаки только за счет угловой скорости крена в соответствии с зависимостью
Δαωx= Δαβ,ωx-Δαβ , (3) где Δαβ - сигнал датчика 3 угла скольжения, пропорциональный приращению угла атаки только за счет наличия угла скольжения и получаемый путем соответствующего масштабирования сигнала с датчика угла скольжения.
При совпадении сигнала критического угла атаки, задаваемого задатчиком 7, с сигналом любого из датчиков 1 или 2 угла атаки схема 8 сравнения выдает сигнал в логическое устройство 9. При поступлении этого сигнала (что указывает на наличие предельного режима полета по углу атаки) в логическом устройстве 9 происходит последовательное сравнение выходного сигнала сумматора 5 с сигналом задатчика 7 и сигнала Δαωx с сигналом датчика 3 угла скольжения.
При совпадении сигнала αβ=0,ωx=0 с сигналом задатчика 7 формируется команда на отключение только руля высоты Uδв. При их несовпадении и в случае, когда Δαβ>Δαωx , формируется команда на отклонение только руля направления Uδн, а в случае, когда Δαβ<Δαωx , формируется сигнал на отклонение только элеронов Uδэ, когда Δαβ= Δαωx , то формируются сигналы на отклонение рулей направления и элеронов (Uδн и Uδэ). Усилительно-преобразующее устройство преобразует эти сигналы и выдает команды на отклонение управляющих органов самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА АТАКИ САМОЛЕТА | 1976 |
|
SU601893A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2701628C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА СО СТАТИЧЕСКИМ АВТОПИЛОТОМ И С ОГРАНИЧЕНИЕМ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2695474C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ САМОЛЕТА, содержащее датчики углов атаки, расположенные в каждом крыле самолета, задатчик критического угла атаки, блок формирования команд, включающий вычитающий элемент и последовательно соединенные схему сравнения и усилительно-преобразующее устройство, причем выходы датчиков углов атаки подключены к входам схемы сравнения и входам вычитающего элемента, и выход задатчика критического угла атаки соединен с входом схемы сравнения, отличающееся тем, что, с целью увеличения маневренности самолета с одновременным предотвращением входа самолета в штопор, в него введен датчик угла скольжения, и блок формирования команд содержит сумматор и логическое устройство, включенное между схемой сравнения и усилительно-преобразующим устройством, другие входы логического устройства соединены с выходами датчика угла скольжения, сумматор вычитающего элемента, задатчика критического угла атаки, входы сумматора подключены к выходам датчиков угла атаки.
