Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана.
Известно изобретение - аэродинамический стабилизатор-наводчик груза подъемного крана (Журнал "Строительные и дорожные машины", 1998, №1, с.17-19), содержащий многолопастную воздушную крыльчатку с быстроходным электроприводом. На корпусе стабилизатора по окружности расположены всасывающие и выхлопные отверстия. Отверстия могут перекрываться заслонками с электромагнитным приводом. Устройство содержит также датчик углового отклонения от вертикали и микропроцессорный блок управления стабилизацией и наводкой. Стабилизатор-наводчик груза имеет инфракрасные детекторы для приема управляющих сигналов, излучаемых ручным пультом управления, который находится у монтажника. Гашение свободных колебаний груза и его перемещение в горизонтальной плоскости в определенных пределах достигается периодическим изменением направления вектора тяги воздушной крыльчатки стабилизатора. Стабилизатор навешивают на крюк крана как сменное оборудование или при длительном использовании крепят непосредственно к крюковой обойме. Для навешивания грузозахватных приспособлений в нижней части стабилизатора имеется стандартный крюк.
Аэродинамический стабилизатор-наводчик груза позволяет сократить скорость и время наводки и установки монтируемого блока в проектное положение.
Недостатками данного устройства является следующее.
1. Использование стабилизатора-наводчика груза преимущественно направлено на гашение колебаний груза при строительстве высотных сооружений.
2. Следует отметить значительную дороговизну устройства (8-10% от стоимости строительного крана).
3. Сложность конструкции.
Другим известным изобретением является поворотное грузозахватное устройство, выпускаемое фирмой "Пайнер" (ФРГ), содержащее асинхронный двигатель, статорная часть которого закреплена на валу, который через подпятник опирается на подвесную скобу, навешиваемую на переходное кольцо. В свою очередь, переходное кольцо навешивается на крюк каната строительного крана. Роторная часть электродвигателя закреплена в корпусе, опирающемся на вал через подшипники качения, а выходной конец последнего, выполненный в виде замкнутой петли, используется для навески собственно грузозахватного устройства для груза. Питание роторной части электроэнергией осуществляется через гибкий кабель и кольцевые токосъемники (Вайнсон А.А., Андреев А.Ф. Крановые грузозахватные устройства: Справочник. - М.: Машиностроение, 1982. - С.40-41).
Поворотное устройство позволяет ориентировать монтируемый груз в необходимое положение.
Недостатками изобретения является следующее.
1. Невозможность стабилизировать раскачивание груза в вертикальной плоскости.
2. Отсутствие в устройстве автоматического регулирования процессом уравновешивания груза на канате строительного крана.
Наиболее близким к предлагаемому изобретению относится устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, статорная часть которого жестко закреплена на валу, опирающемся через подпятник на подвесную скобу, связанную через переходное кольцо с крюком крана, а роторная часть, питание которой осуществляется через гибкий кабель и кольцевые токосъемники, закреплена в корпусе, опирающемся на вал через подшипники качения, причем выходной конец вала выполнен в виде замкнутой петли для навески груза; на валу установлен дополнительно асинхронный двигатель с возможностью вращения вала в сторону, противоположную вращению первого асинхронного двигателя, на корпусах асинхронных двигателей жестко закреплены расположенные взаимно перпендикулярно в горизонтальной плоскости две пары металлических стержней, на которых с возможностью перемещения по ним установлены грузила, при этом датчик углового отклонения груза от вертикали через микропроцессорный блок управления соединен с асинхронными двигателями (Патент РФ №2224708 от 27.02.04 г., М. кл. В 66 С 13/06).
Недостатками данного изобретения является следующее.
1. Масса подвешиваемого груза ограничивает прецессионное движение вала.
2. В устройстве отсутствует датчик периода колебаний, необходимый для управления длительностью прецессии.
3. Использование второго асинхронного двигателя влечет за собой увеличение массы конструкции устройства и его стоимость.
Задачей изобретения является повышение эффективности гашения колебаний в двух взаимно перпендикулярных вертикальных плоскостях за счет расширения его конструктивных особенностей.
Поставленная задача достигается тем, что
1. Устройство для гашения колебаний груза, подвешенного на канате строительного крана, содержащее асинхронный двигатель, вращающийся относительно вертикальной оси, и датчик углового отклонения груза от вертикали, связанный с микропроцессорным блоком управления, содержит корпус, внутри которого через подшипники, симметрично расположенные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама, на общем с горизонтальной рамой валу соосно установлены редуктор прецессионного электродвигателя и тормоз, причем с горизонтальной рамой внутренним образом шарнирно соединена вертикальная рама посредством подшипников, симметрично расположенных относительно центральной поперечной горизонтальной оси, с возможностью поворота относительно центральной продольной горизонтальной оси устройства, на общем с вертикальной рамой валу соосно установлены другие редуктор прецессионного электродвигателя и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства, а также вертикальная рама связана с упомянутым асинхронным двигателем, имеющим с ней общую вертикальную ось.
2. Устройство по п.1 содержит внутри корпуса жестко закрепленый датчик периода колебаний, а снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
Новые существенные признаки.
1. Устройство содержит корпус.
2. Внутри корпуса установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама.
3. Горизонтальная рама установлена через подшипники, симметрично расположенные в стенках корпуса относительно центральной вертикальной оси устройства.
4. На общем с горизонтальной рамой валу установлены редуктор прецессионного электродвигателя и тормоз.
5. Вал, редуктор, прецессионный электродвигатель и тормоз имеют с горизонтальной рамой общую ось, совпадающую с центральной поперечной горизонтальной осью устройства.
6. Вертикальная рама установлена внутри горизонтальной рамы посредством подшипников с возможностью поворота относительно центральной продольной горизонтальной оси устройства.
7. Подшипники расположены на горизонтальной раме симметрично относительно центральной поперечной горизонтальной оси устройства.
8. На общем с вертикальной рамой валу установлены другие редуктор прецессионного электродвигателя и тормоз.
9. Вал, редуктор, прецессионный двигатель и тормоз имеют с вертикальной рамой общую ось, совпадающую с центральной продольной горизонтальной осью устройства.
10. Вертикальная рама связана с асинхронным двигателем, имеющим с ней общую вертикальную ось.
11. Внутри корпуса жестко закреплен датчик периода колебаний.
12. Снаружи корпуса в верхней его части жестко закреплены подвеска, а в нижней - грузовой крюк.
Перечисленная совокупность признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Технический результат обеспечивается наличием в устройстве горизонтальной и вертикальной рам с асинхронным двигателем, установленным в последней. Величина, направление и длительность принудительной прецессии асинхронного двигателя определяется датчиками угла и периода колебаний грузового подвеса и осуществляется прецессионными электродвигателями по командам микропроцессорного блока. С помощью жестко закрепленной снаружи верхней части корпуса подвески устройство навешивается на грузозахватный орган крана, а жестко закрепленный снаружи корпуса в его нижней части грузовой крюк предназначен для навешивания перемещаемого груза.
Устройство для гашения колебаний груза, подвешенного на канате строительного крана, изображено на фиг.1 - схема общего вида устройства.
Устройство содержит корпус 1, в котором через подшипники 2, симметрично расположенные относительно центральной вертикальной оси 3 устройства, установлена с возможностью поворота относительно центральной горизонтальной оси 4 устройства горизонтальная рама 5. Снаружи корпуса 1 на общем с горизонтальной рамой 5 валу 6 соосно установлены редуктор 7 прецессионного электродвигателя 8 и тормоз 9. С горизонтальной рамой 5 внутренним образом шарнирно связана вертикальная рама 10 посредством подшипников 11, расположенных на горизонтальной раме 5 симметрично относительно центральной поперечной горизонтальной оси 4 устройства. Вертикальная рама 10 установлена с возможностью поворота относительно центральной продольной горизонтальной оси 12 устройства. На общем с вертикальной рамой 10 валу 13 соосно установлены: редуктор 14 прецессионного электродвигателя 15 и тормоз 16, имеющие с последней общую ось, совпадающую с центральной продольной горизонтальной осью 12 устройства. Вертикальная рама 10 подвижно связана через подшипники 17 с асинхронным двигателем 18, имеющим с ней общую вертикальную ось 3. Внутри корпуса 1 жестко закреплены датчик угла 19, датчик периода колебаний 20 и микропроцессорный блок 21. Снаружи корпуса 1 в верхней его части жестко закреплены подвеска 22, а в нижней - грузовой крюк 23.
Устройство работает следующим образом.
Гашение колебаний груза происходит автоматически по команде микропроцессорного блока 21, обрабатывающего сигналы датчиков угла 19 отклонения груза от вертикали и датчика периода колебаний 20. В зависимости от того, в какую сторону произошло отклонение груза от вертикали, автоматически приводятся в действие электродвигатели 8 и (или) 15 в сторону прецессии.
При отклонении грузового подвеса на угол β относительно оси 3 прецессия вертикальной рамы 10 с асинхронным двигателем 18 создается через редуктор 14 прецессионным электродвигателем 15, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и датчика периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 16 вала 13 вертикальной рамы 10. Следствием прецессионного движения вертикальной рамы 10 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
Когда угол прецессии вертикальной рамы 10 от среднего положения достигнет предельного значения α=(30÷60)°, электродвигатель 15 отключается через микропроцессорный блок 21. Одновременно включается тормоз 16.
По окончании четверти периода колебаний датчик периода колебаний 20 сообщает сигнал на микропроцессорный блок 21, который формирует управляющие сигналы тормозу 16 и электродвигателю 15. Последний начинает вращаться в обратную сторону и по окончании полупериода колебаний приведет ось асинхронного двигателя 18 в вертикальное положение.
При отклонении грузового подвеса на угол α в плоскости осей 3 и 4 (вокруг оси 12) прецессия горизонтальной рамы 5 с асинхронным двигателем 18, закрепленным в вертикальной раме 10, создается через редуктор 7 электродвигателем 8, управляемым микропроцессорным блоком 21, обрабатывающим сигналы датчика угла 19 и периода колебаний 20. Одновременно по сигналу микропроцессорного блока 21 растормаживается тормоз 9 вала 6 вертикальной рамы 10. Следствием прецессионного движения горизонтальной рамы 5 с асинхронным двигателем 18 является гироскопический стабилизирующий момент.
Когда угол прецессии β горизонтальной рамы 5 от среднего положения достигнет предельного значения β=(30÷60)°, электродвигатель 8 отключается микропроцессорным блоком 21. Одновременно включается тормоз 9.
По окончании четверти периода колебаний датчик периода колебаний 20 дает сигнал на микропроцессорный блок 21, который формирует управляющие сигналы тормозу 9 и электродвигателю 8. Последний начинает вращаться в обратную сторону и по окончании полупериода колебаний приведет ось 3 асинхронного двигателя 18 в вертикальное положение.
Перечень позиций на чертеже к заявке
УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА
1 - корпус;
2 - подшипники;
3 - ось устройства центральная вертикальная;
4 - ось устройства центральная поперечная горизонтальная;
5 - рама горизонтальная;
6 - вал;
7 - редуктор;
8 - электродвигатель прецессионный;
9 - тормоз;
10 - рама вертикальная;
11 - подшипники;
12 - ось устройства центральная продольная горизонтальная;
13 - вал;
14 - редуктор;
15 - электродвигатель прецессионный;
16 - тормоз;
17 - подшипники;
18 - двигатель асинхронный;
19 - датчик угла;
20 - датчик периода;
21 - подвеска;
22 - крюк грузовой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА | 2001 |
|
RU2224708C2 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ И НАВОДКИ ПОДНЯТОГО КРАНОМ ГРУЗА | 1997 |
|
RU2141926C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Грузовая тележка для крана мостового типа | 1975 |
|
SU517554A1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168431C2 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Способ гашения колебаний груза и устройство для его осуществления | 1989 |
|
SU1801923A1 |
Изобретение относится к области машиностроения и может быть использовано преимущественно для уменьшения раскачивания груза на канате строительного крана. Устройство для гашения колебаний груза, подвешенного на канате строительного крана содержит корпус, внутри которого через подшипники, симметрично установленные относительно центральной вертикальной оси устройства, установлена с возможностью поворота относительно центральной поперечной горизонтальной оси устройства горизонтальная рама. На общем с горизонтальной рамой валу установлены редуктор прецессионного двигателя и тормоз. С горизонтальной рамой внутренним образом соединена вертикальная рама с возможностью поворота относительно центральной поперечной горизонтальной оси устройства. На общем с вертикальной рамой валу соосно установлены другие редуктор и тормоз, имеющие с вертикальной рамой общую ось, совпадающую с центральной продольной осью устройства. Вертикальная рама связана с асинхронным двигателем, имеющим с ней общую вертикальную ось. Внутри корпуса жестко закреплен датчик периода колебаний, а снаружи в верхней части корпуса закреплены подвеска, а в нижней - грузовой крюк. Технический результат - повышение эффективности гашения колебаний и расширение конструктивных особенностей. 1 з.п. ф-лы, 1 ил.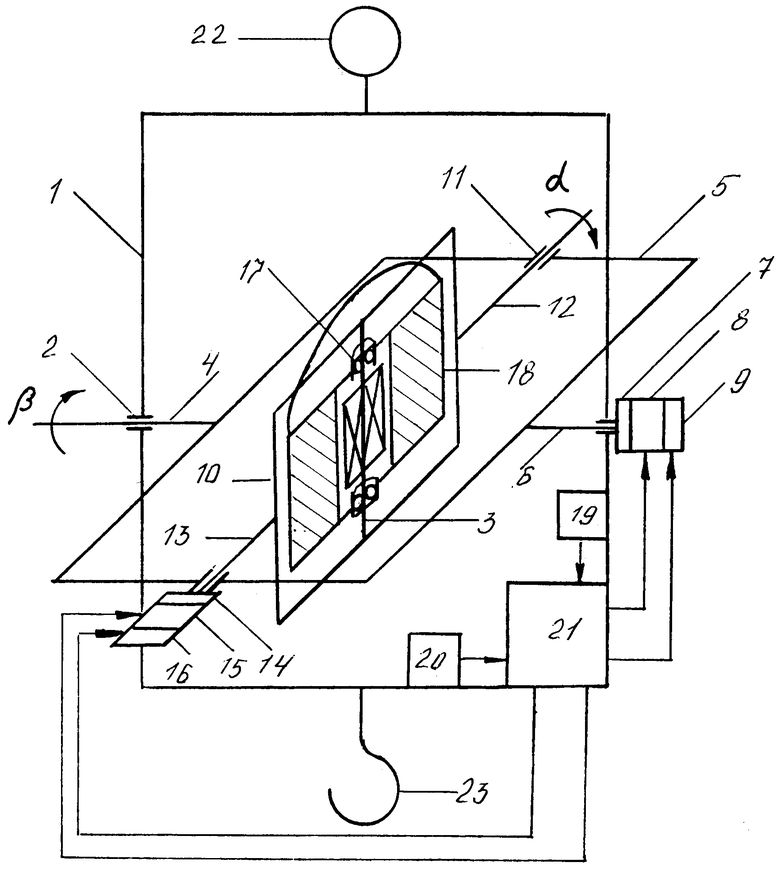
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА | 2001 |
|
RU2224708C2 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ И НАВОДКИ ПОДНЯТОГО КРАНОМ ГРУЗА | 1997 |
|
RU2141926C1 |
| Способ прогнозирования аварийного давления горных пород при работе на удароопасных участках подземных выработок | 1984 |
|
SU1273549A1 |

