Область техники
Изобретение относится к машиностроению, в частности к транспортным средствам, способным перемещаться по произвольно ориентированной поверхности, и может быть использовано для создания различного рода роботов, предназначенных для работы в труднодоступных местах и зонах с повышенной опасностью.
Предшествующий уровень техники
Известно транспортное средство для перемещения по произвольно ориентированной поверхности, описанное в патенте РФ №2092369 с приоритетом от 18.03.96 г. и опубликованном 10.10.97 г., (МПК В 62 D 57/032). Указанное транспортное средство содержит две связанные между собой платформы, вакуумные захваты, выполненные с эластичной юбкой, механизм управления захватами, обеспечивающий строго заданный уровень вакуумирования, и колесный привод одной из платформ.
Данное устройство весьма быстроходно и маневренно. Однако оно имеет сложную систему управления захватами. К тому же оно недостаточно надежно из-за сложности системы в целом и в том числе поддержания строго заданного уровня вакуумирования захватов.
Известно транспортное средство для перемещения по произвольно ориентированной поверхности, описанное в патенте РФ №2057046 с приоритетом от 09.03.92 г., опубликованном 27.03.96 г. (МПК В 62 D 57/032). Это транспортное средство содержит платформу, вакуумные захваты, шаговый механизм их перемещения и механизм управления захватами.
Данное устройство несколько проще и соответственно надежнее предыдущего аналога. Однако оно также имеет сложную систему перемещения управления захватами и недостаточно надежно. К тому же оно не отличается, как и большинство шаговых механизмов, быстроходностью.
Известно транспортное средство для перемещения по произвольно ориентированной поверхности, описанное в патенте РФ №2042558 с приоритетом от 09.03.92 г., опубликованном 27.08.95 г. (МПК В 62 D 57/032). Это транспортное средство содержит две связанные между собой платформы, вакуумные захваты, шаговый механизм их перемещения и механизм управления захватами. Оба механизма используют в своей работе пневмоцилиндры.
Управление описанным устройством также достаточно сложно. Устройство не отличается быстроходностью. К тому же оно и недостаточно надежно, как за счет сложности системы, так и за счет сложности создания вакуума в захватах с помощью пневмоцилиндров - любая помеха, например вибрация, может привести к отказу захвата.
Известно транспортное средство для перемещения по произвольно ориентированной поверхности, описанное в SU 852698 А с приоритетом от 07.08.1981 г. (МПК В 62 D 55/08), содержащее платформу, вакуумные захваты, механизм перемещения захватов и устройство управления ими. При этом механизм перемещения захватов платформы выполнен в виде гусеничного движителя, в котором траки гусениц снабжены вакуумными захватами, а устройство управления вакуумными захватами выполнено в виде вакуумного насоса с распределительными механизмами для каждой гусеницы, соединенными гибкими шлангами с вакуумными захватами этой гусеницы. Это устройство выбрано в качестве прототипа. Данное транспортное средство более быстроходно и надежно, чем вышеописанные. Однако система управления транспортным средством весьма сложна.
Раскрытие изобретения
Технический результат - упрощение системы управления транспортным средством.
Заявленный технический результат достигается тем, что в транспортном средстве для перемещения по произвольно ориентированной поверхности, содержащем платформу, вакуумные захваты, механизм перемещения захватов и устройство управления ими, при этом механизм перемещения захватов платформы выполнен в виде гусеничного движителя, в котором траки гусениц снабжены вакуумными захватами, а устройство управления вакуумными захватами выполнено в виде вакуумного насоса с распределительными механизмами для каждой гусеницы, соединенными гибкими шлангами с вакуумными захватами этой гусеницы, согласно изобретению распределительный механизм выполнен в виде двух прилегающих друг другу торцами и установленных соосно элементов, при этом один из элементов выполнен подвижным и снабжен числом отверстий под гибкие шланги, равным числу вакуумных захватов на гусенице, а другой - неподвижным, закрепленным на платформе, с отверстиями, соединенными с вакуумным насосом или атмосферой, при этом подвижный элемент связан с ведущим колесом гусеницы, причем отверстия со стороны торцев, обращенных к подвижным элементам, выполнены с сегментными выемками, угловые размеры которых и их расположение подобраны с возможностью вакуумирования в момент касания вакуумного захвата с поверхностью и далее - до отрыва вакуумного захвата от поверхности.
Для исключения возможности «провисания» траков гусениц последние целесообразно снабдить роликами, взаимодействующими с опорами, закрепленными на платформе.
Краткое описание фигур чертежа
На фиг.1 схематично показано транспортное средство (вид сбоку).
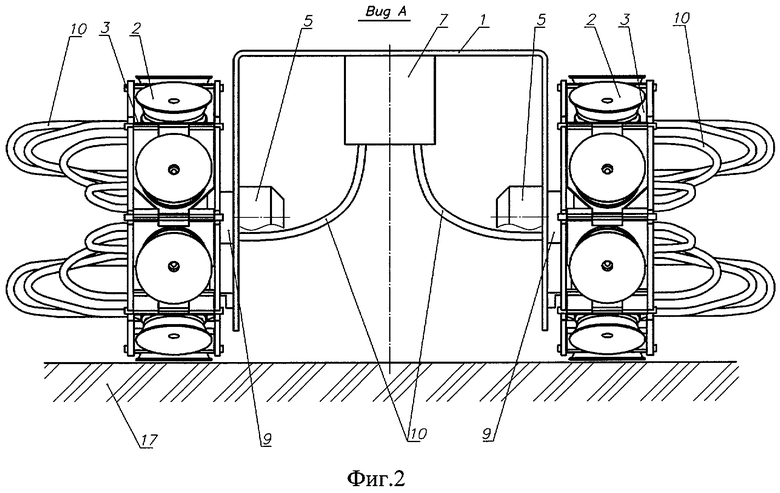
На фиг.2 - вид А на фиг.1.
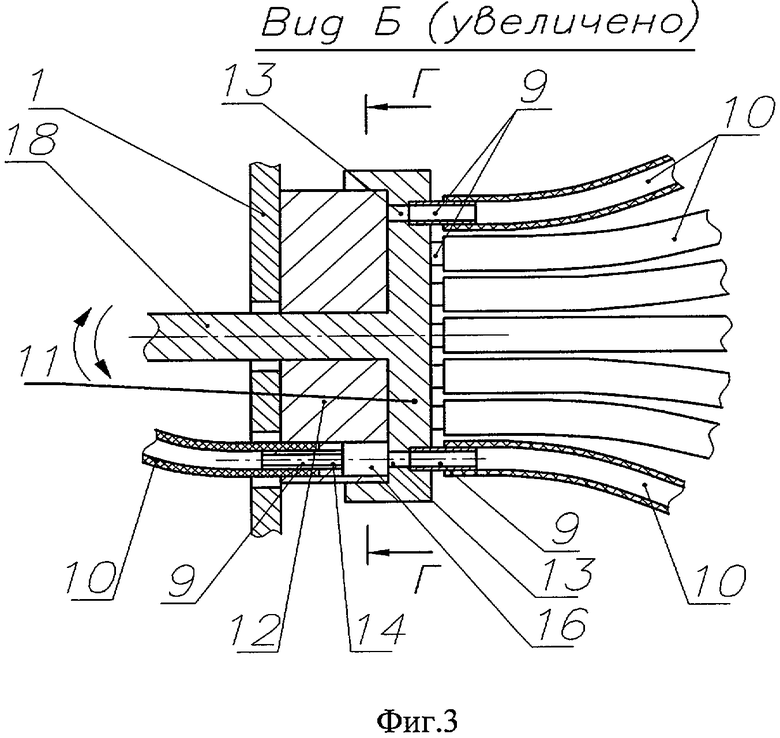
На фиг.3 - вид Б на фиг.1 с разрезом по оси.
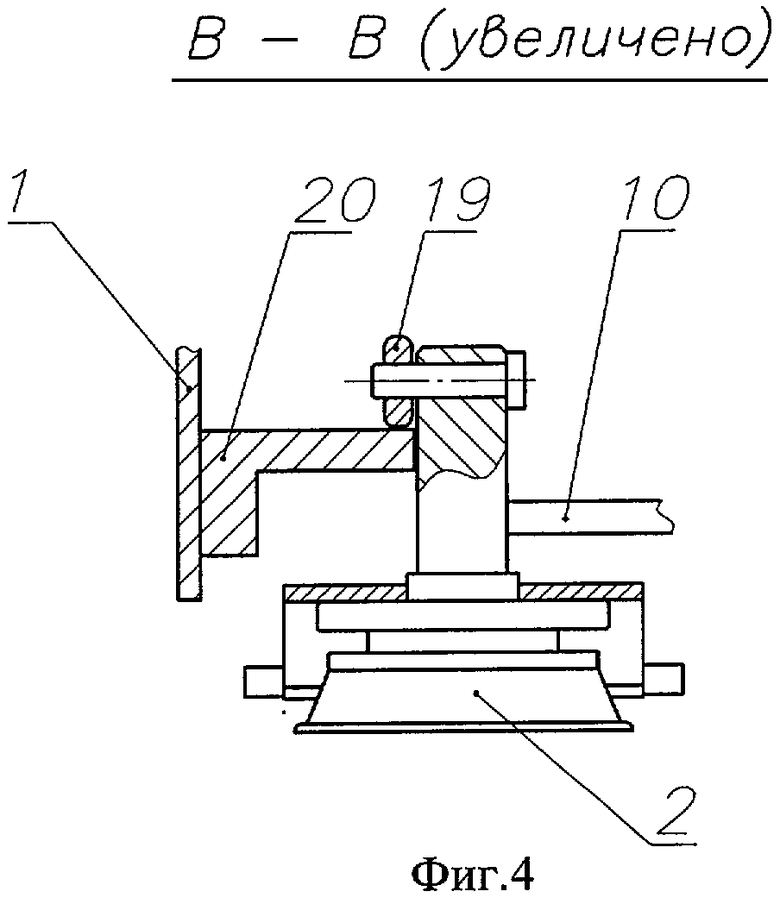
На фиг.4 - сечение В-В на фиг.1.
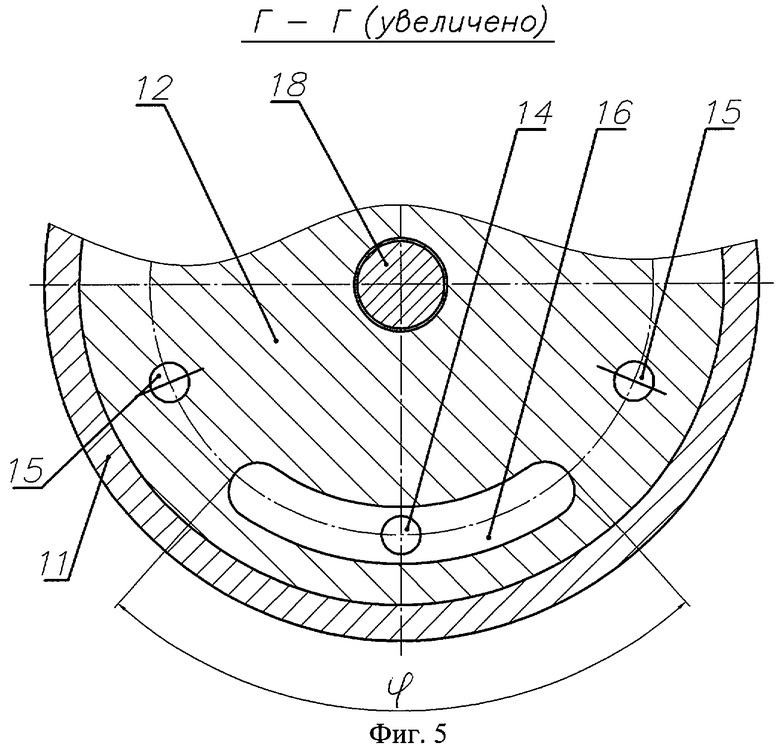
На фиг.5 - сечение Г-Г на фиг.3.
Варианты осуществления изобретения
Транспортное средство содержит платформу 1, вакуумные захваты 2, механизм перемещения захватов 2 и устройство управления захватами 2.
Механизм перемещения захватов 2 выполнен в виде гусеничного движителя с двумя гусеницами 3, в котором траки 4 гусениц 3 снабжены вакуумными захватами 2. Гусеницы 3 приводятся в движение от реверсивных электродвигателей 5 с помощью колес 6. В принципе, любое из двух колес 6 гусеницы 3 может быть выполнено ведущим.
Устройство управления вакуумными захватами 2 выполнено в виде вакуумного насоса 7, установленного на платформе 1, с распределительными механизмами 8 для каждой гусеницы 3. Распределительные механизмы соединены с помощью штуцеров 9 гибкими шлангами 10 с насосом 7 и вакуумными захватами 2.
Распределительные механизмы 8 могут быть выполнены в виде набора управляемых клапанов, соединяющих по определенной программе вакуумные захваты 2 с насосом 7 и атмосферой (вариант на чертеже не показан).
Наиболее простым видится выполнение распределительных механизмов 8 в виде двух прилегающих друг другу торцами и установленных соосно элементов 11 и 12. Элементы 11 выполнены подвижными и снабжены отверстиями 13 числом, равным числу вакуумных захватов 2 на гусенице 3. Элементы 12 - неподвижны и закреплены на платформе 1. В них выполнены отверстия 14 и 15, соединенные с вакуумным насосом 7 или атмосферой. Отверстия 14 со стороны торцов, обращенных к подвижным элементам 11, выполнены с сегментными выемками 16. Угловые размеры (угол ϕ на фиг.5) сегментов 16 и их расположение, подобраны так, что вакуумирование происходит в момент касания вакуумного захвата 2 с поверхностью 17, и, далее, поддерживается до отрыва вакуумного захвата 2 от поверхности. Для снятия разрежения при отрыве в неподвижном элементе 12 имеются отверстия 15, сообщенные с атмосферой, с которыми в этот момент совмещаются отверстия 13 подвижного элемента 11. Таких отверстий два, так как транспортное средство может совершать обратный ход.
Подвижные элементы 11 связаны с ведущими колесами 6 гусениц 3 через вал 18, например, с помощью цепной передачи (на чертеже не показано), обеспечивающей синхронное вращение гусениц 3 и соответствующего элемента 11.
Для исключения возможности «провисания» траков 4 гусениц 3 последние целесообразно снабдить роликами 19, установленными на траках 4 и взаимодействующими с опорами 20, закрепленными на платформе 1.
Транспортное средство работает следующим образом.
Вращение от двигателей 5 передается на ведущие колеса 6, что вызывает движение гусениц 3. С помощью цепной передачи (не показана) вращение ведущих колес 6 передается через вал 16 на подвижные элементы 11, заставляя их вращаться в ту же сторону, что и ведущие колеса 6 с гусеницей 3. Передаточное отношение цепной передачи таково, что при одном обороте гусеницы 3 подвижный элемент 11 также совершает один оборот. Отверстия 13 подвижных элементов 11 при их вращении на некоторое время сообщаются с отверстиями 14 и 15 неподвижных элементов 12, соединяя вакуумные захваты 2 через гибкие шланги 10, либо с вакуумным насосом 7, либо с атмосферой. Вакуумирование происходит в момент касания вакуумных захватов 2 с поверхностью, и далее оно поддерживается до отрыва вакуумного элемента 2 от поверхности. Поворот и обратный ход транспортного средства осуществляются с помощью двигателей 6. При перемещении по горизонтальным или мало наклонным поверхностям вакуумный насос 7 можно отключать.
Промышленная применимость
Изобретение может быть использовано для создания различного рода роботов, предназначенных для работы в труднодоступных местах и зонах с повышенной опасностью, например для работы на АЭС.
В изготовленном опытном образце каждая гусеница состоит из 16 траков с присосками. Ведущие колеса имеют по 8 впадин, в которых при вращении колес размещаются оси сочленяющие траки, и при одном обороте гусеницы колеса совершают по два оборота. Передаточное отношение от одного из колес к подвижному диску составляет 1:2. Испытания устройства дали положительный результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА | 2005 |
|
RU2289696C1 |
| Движитель повышенной проходимости на пневмогусенице на воздушной подушке | 2016 |
|
RU2675725C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ | 1992 |
|
RU2065418C1 |
| РЕГУЛЯТОР РАСХОДА ГАЗА | 1991 |
|
RU2010298C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1996 |
|
RU2092369C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОДВИЖНОСТИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА НА ГРУНТАХ С ВЫСОКОЙ АДГЕЗИЕЙ И САМОХОДНОЕ ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2028242C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 2003 |
|
RU2260543C2 |
| Мобильный технологический комплекс зачистки и мойки жестких резервуаров | 2016 |
|
RU2616051C1 |
| СПОСОБ ПЕРЕХОДА ТРАНСПОРТНЫХ СРЕДСТВ С КОЛЕСНОГО ХОДА НА КОЛЕСНО-СЦЕПНОЙ И ОБРАТНО И УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖИТЕЛЕЙ | 2012 |
|
RU2500566C2 |
Изобретение относится к машиностроению, в частности к транспортным средствам, способным перемещаться по произвольно ориентированной поверхности, и может быть использовано для создания различного рода роботов, предназначенных для работы в труднодоступных местах и зонах с повышенной опасностью. Транспортное средство для перемещения по произвольно ориентированной поверхности содержит платформу, вакуумные захваты, механизм перемещения захватов и устройство управления ими. Механизм перемещения захватов платформы выполнен в виде гусеничного движителя, в котором траки гусениц снабжены вакуумными захватами. Устройство управления вакуумными захватами выполнено в виде вакуумного насоса с распределительными механизмами для каждой гусеницы, соединенными гибкими шлангами с вакуумными захватами этой гусеницы. Распределительный механизм выполнен в виде двух прилегающих друг к другу торцами и установленных соосно элементов. Один из элементов выполнен подвижным и снабжен числом отверстий под гибкие шланги, равным числу вакуумных захватов на гусенице, другой - неподвижным, закрепленным на платформе, с отверстиями, соединенными с вакуумным насосом или атмосферой. Подвижный элемент связан с ведущим колесом гусеницы. Отверстия со стороны торцев, обращенных к подвижным элементам, выполнены с сегментными выемками, угловые размеры которых и их расположение подобраны с возможностью вакуумирования в момент касания вакуумного захвата с поверхностью и далее - до отрыва вакуумного захвата от поверхности. Траки гусениц могут быть снабжены роликами, взаимодействующими с опорами, закрепленными на платформе. Технический результат - упрощение системы управления транспортным средством. 1 з.п. ф-лы, 5 ил.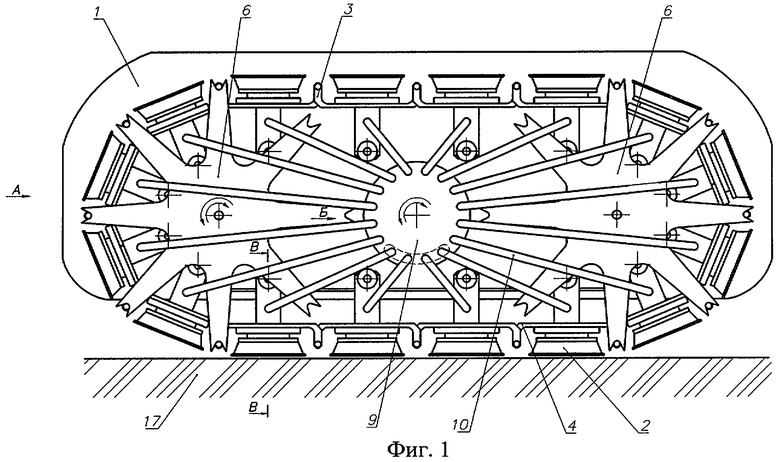
| Вакуумно-гусеничный движитель | 1979 |
|
SU852698A1 |
| Устройство для передвижения по гладкой плоской поверхности,произвольно ориентированной в пространстве | 1982 |
|
SU1109331A1 |
| Устройство для контроля знаний обучаемых | 1986 |
|
SU1336082A1 |
| US 3991842 A, 16.11.1976. | |||

