1. Область техники, к которой относится изобретения
Настоящее изобретение относится к роботам-уборщикам и, в частности, к способу компенсации погрешности угловой координаты робота-уборщика, сводящему к минимуму погрешность угловой координаты робота-уборщика.
2. Предшествующий уровень техники
Обычно работа робота-уборщика состоит из операций нахождения зоны уборки вдоль поверхности стены помещения (например, жилой комнаты или внутреннего помещения) в доме и возвращения в первоначальное положение; осуществления уборки при движении по маршруту уборки в определенной зоне уборки; и передвижения к зарядному устройству и автоматической подзарядки аккумулятора робота-уборщика по завершении уборки.
Таким образом, точное вычисление координат местоположения робота-уборщика в процессе каждой операции уборки (направление осей 'х' и 'у' или направление поворота) является критическим фактором, определяющим эффективность уборки. В частности, величина погрешности угловой координаты робота-уборщика при осуществлении операции уборки по определенной схеме имеет большое значение для эффективности уборки.
Существуют различные способы определения местоположения робота-уборщика.
Например, один из способов определения абсолютного местоположения робота-уборщика заключается в использовании GPS (сокр. От Global Positioning System - глобальная спутниковая система определения местоположения). Однако несмотря на свое преимущество при определении абсолютного местоположения, данный способ имеет недостаток, заключающийся в том, что если GPS применяется в ограниченном пространстве, таком как здание, точность GPS падает. То есть, GPS по существу нельзя использовать в здании.
Другой способ заключается в получении угловой скорости и линейной скорости от датчика положения (не показан), установленного в роботе-уборщике, и интегрировании полученных угловой скорости и линейной скорости для определения относительного местоположения робота-уборщика.
Однако хотя использование датчика положения и снижает расходы на применение робота-уборщика, возникает погрешность угловой координаты, обусловленная состоянием нижней поверхности, погрешностями при сборке робота-уборщика, скольжением и т.д., и, кроме того, есть трудности с вычислением погрешности угловой координаты.
Третий способ заключается в определении угловой координаты робота-уборщика путем интегрирования угловой скорости гиродатчика. Например, гиродатчик выдает 2,5 вольт, когда робот-уборщик не поворачивается. При повороте робота-уборщика с угловой скоростью 90° /с по часовой стрелке гиродатчик выдает 5,0 вольт. При повороте робота-уборщика с угловой скоростью 90° /с против часовой стрелки гиродатчик выдает 0 вольт. Если гиродатчик выдает 1,25 вольт, это означает, что робот-уборщик поворачивается с угловой скоростью 45° /с против часовой стрелки.
Однако в настоящем изобретении после проведения различных экспериментов и применения метода проб и ошибок был отмечен важный факт, заключающийся в том, что когда угловую координату робота-уборщика вычисляют по данным гиродатчика, значение ухода гиродатчика со временем изменяется, и если измененные значения ухода не скомпенсировать, погрешности угловой координаты робота-уборщика будут накапливаться.
То есть, хотя гиродатчик для измерения скорости поворота (угловой скорости) имеет преимущество, состоящее в том, что не возникает погрешности датчика положения в отношении состояния нижней поверхности, в случае внешнего воздействия или столкновения с предметом накопление погрешностей угловой координаты, связанных со значением ухода гиродатчика, снижает эффективность уборки, производимой роботом-уборщиком.
В то же самое время в патенте США №.5440216 описаны обычные технические средства в отношении робота-уборщика, а в патенте США №.5646494 описан гиродатчик робота-уборщика.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Поэтому целью настоящего изобретения является создание способа компенсации погрешности угловой координаты робота-уборщика, обеспечивающего уменьшение погрешности угловой координаты робота-уборщика путем компенсации значения ухода гиродатчика робота-уборщика.
Другой целью настоящего изобретения является создание способа компенсации погрешности угловой координаты робота-уборщика, позволяющего минимизировать погрешность угловой координаты робота-уборщика путем компенсации значения ухода гиродатчика робота-уборщика при любой временной остановке робота-уборщика.
Еще одна цель настоящего изобретения заключается в создании способа компенсации погрешности угловой координаты робота-уборщика, позволяющего минимизировать погрешность угловой координаты робота-уборщика путем компенсации значения ухода гиродатчика робота-уборщика после временной остановки робота-уборщика, когда робот-уборщик начинает операции уборки.
И еще одной целью настоящего изобретения является создание способа компенсации погрешности угловой координаты робота-уборщика, позволяющего минимизировать погрешность угловой координаты робота-уборщика путем компенсации значения ухода гиродатчика робота-уборщика, когда робот-уборщик временно останавливается на месте для изменения своего направления с данного места по истечении установленного времени.
И другой целью настоящего изобретения является создание способа компенсации погрешности угловой координаты робота-уборщика, в котором при временной остановке робота-уборщика получают выборочное среднее значение ухода гиродатчика, и если выборочное среднее значение намного отличается от действительного значения ухода гиродатчика, то робот-уборщик временно останавливают, а значение ухода гиродатчика робота-уборщика компенсируют, чтобы минимизировать погрешность угловой координаты робота-уборщика.
Для достижения этих и иных преимуществ, а также согласно цели настоящего изобретения, как явствует из нижеследующего описания примеров его осуществления, предлагается способ компенсации погрешности угловой координаты робота-уборщика, включающий нахождение значения ухода датчика для определения угловой скорости робота-уборщика; компенсацию найденного значения ухода и коррекцию угловой координаты робота-уборщика на основе скомпенсированного значения ухода.
Для достижения этих целей также предлагается способ компенсации погрешности угловой координаты робота-уборщика, включающий нахождение значения ухода гиродатчика после остановки робота-уборщика на заданное время, в течение которого робот-уборщик находится в режиме компенсации ухода; получение среднего значения для найденных значений ухода и стандартного отклонения; усреднение значения ухода при устраненных шумах на основе среднего значения и стандартного отклонения; принятие усредненного значения ухода в качестве нового значения ухода гиродатчика; и компенсацию погрешности угловой координаты робота-уборщика на основе нового значения ухода гиродатчика.
Вышеуказанные и другие цели, признаки, аспекты и преимущества настоящего изобретения будут более понятны из нижеследующего подробного описания настоящего изобретения в совокупности с прилагаемыми чертежами.
Краткое описание чертежей
Чертежи, прилагаемые для более ясного понимания сущности изобретения и включенные в состав и являющиеся частью данного описания, показывают примеры осуществления изобретения и вместе с описанием служат для объяснения его принципов.
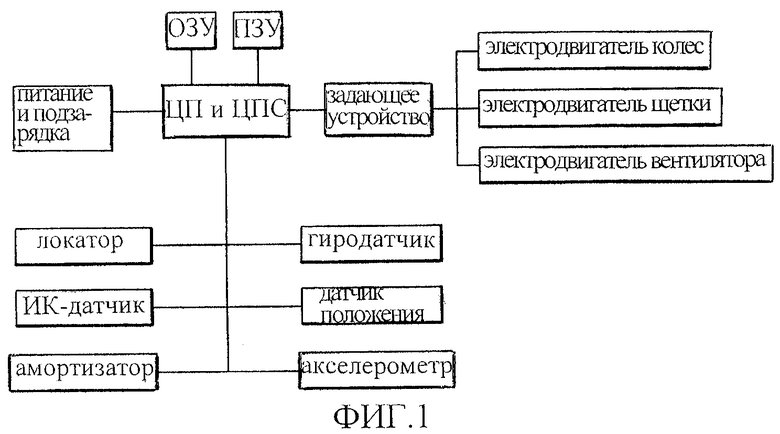
На фиг.1 представлена блок-схема, показывающая общую конструкцию робота-уборщика;
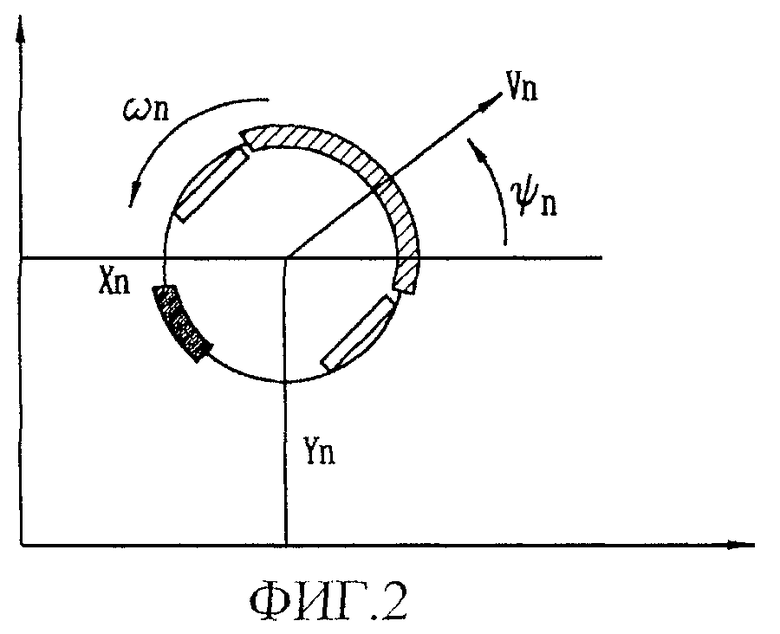
на фиг.2 - система координат, применяемая для компенсации значения ухода гиродатчика робота-уборщика в соответствии с предпочтительными примерами осуществления настоящего изобретения;
на фиг.3 - схема последовательности операций способа компенсации погрешности угловой координаты робота-уборщика согласно предпочтительному примеру осуществления настоящего изобретения; и
на фиг.4А-4D - процессы компенсации угла поворота на основе нового значения ухода гиродатчика согласно предпочтительному примеру осуществления настоящего изобретения.
Подробное описание предпочтительных примеров осуществления изобретения
Ниже приводятся подробные ссылки на предпочтительные примеры осуществления настоящего изобретения, которые показаны на прилагаемых чертежах.
Далее будет описан способ компенсации погрешности угловой координаты робота-уборщика, в котором погрешность угловой координаты робота-уборщика уменьшают за счет минимизации погрешности угловой координаты робота-уборщика путем компенсации значения ухода датчика угловой скорости робота-уборщика в соответствии с предпочтительным примером осуществления настоящего изобретения.
На фиг.1 представлена блок-схема общей конструкции робота-уборщика. Будет описана конструкция обычного робота-уборщика в части, имеющей отношение к настоящему изобретению, в то же время описание конструкции обычного робота-уборщика в части, не имеющей прямого отношения к настоящему изобретению, не приведено.
Прежде всего, координаты (Xn, Yn, ψ n) обычного робота-уборщика корректируют каждый раз при взятии выборки с помощью нижеследующего уравнения (I):
где Xn, Yn, ψ n координаты робота-уборщика, Vn - линейная скорость движения робота-уборщика; ω n - угловая скорость робота-уборщика, Δ t - время взятия выборки.
Линейную скорость движения робота-уборщика (Vn) получают с помощью известных из уровня техники акселерометра или датчика положения. ψ n+1 - текущий угол поворота робота-уборщика, ψ n - предыдущий угол поворота робота-уборщика и ω n·Δt - угол поворота в соответствии с текущей угловой скоростью.
На фиг.2 представлена система координат, применяемая для компенсации значения ухода гиродатчика робота-уборщика согласно предпочтительному примеру осуществления настоящего изобретения. То есть, когда робот-уборщик устанавливают в исходное положение, центр робота-уборщика принимают за исходную точку оси координат. На этот момент принимают, что направлением движения робота-уборщика вперед является ось X, а перпендикулярное направление - 90° к оси Х при движении против часовой стрелки, представляет собой ось Y. Координаты робота-уборщика при n-й выборке выражаются символами Xn, Yn, и ψ n означает угол между осью Х и направлением движения робота вперед.
Угловую скорость (ω n) робота-уборщика вычисляют по величине выходного сигнала гиродатчика. То есть, угловую скорость (ω n) робота-уборщика вычисляют по нижеследующему уравнению (2), а угловую координату робота-уборщика вычисляют по сумме вычисленных угловых скоростей (ω n).

где Gn - действительная величина выходного сигнала гиродатчика, Gуход - величина выходного сигнала гиродатчика при угловой скорости робота-уборщика, равной 0, то есть, значение ухода гиродатчика [мВ], и С – масштабный вектор [град/с/мВ] для преобразования величины выходного сигнала гиродатчика в угловую скорость.
Однако поскольку значение ухода гиродатчика меняется в зависимости от времени и внешних условий, изменившееся значение ухода гиродатчика должно компенсироваться для точного вычисления угловой координаты робота-уборщика.
То есть, как указывалось выше, в ходе различных экспериментов и применения метода проб и ошибок при работе над настоящим изобретением был отмечен важный факт, заключающийся в том, что когда угловую координату робота-уборщика вычисляют с использованием гиродатчика, то с течением времени значение ухода гиродатчика меняется, и если не скомпенсировать изменившееся значение ухода, это приведет к накоплению погрешностей угловой координаты робота-уборщика.
Например, если состояние, при котором скоростное искажение в 0,1 [град/с], вызванное изменением значения ухода гиродатчика, длится в течение 10 минут, то возникает погрешность угловой координаты, в сумме равная 60 [град]=(0,1× 60× 10). Как результат, самодвижущийся робот-уборщик, который осуществляет уборку по картографической информации, не сможет осуществлять уборку из-за погрешности угловой координаты, равной 60 [град].
Ниже следует подробное описание способа компенсации погрешности угловой координаты робота-уборщика согласно предпочтительному примеру осуществления настоящего изобретения со ссылками на фиг.3 и фиг.4A-4D.
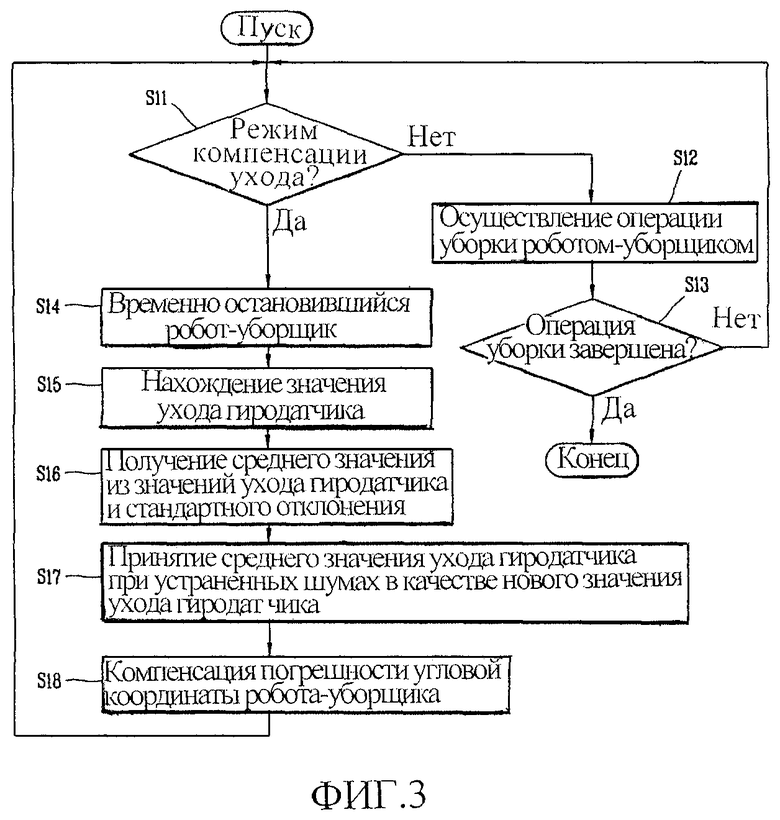
На фиг.3 представлена схема последовательности операций способа компенсации погрешности угловой координаты робота-уборщика согласно предпочтительному примеру осуществления настоящего изобретения.
Вначале, когда режим работы робота-уборщика меняют на режим компенсации ухода гиродатчика, чтобы скорректировать значение ухода гиродатчика, робот-уборщик выполняет операцию коррекции погрешности угловой координаты робота-уборщика. В этом случае предпочтительно также применять режим компенсации ухода и для коррекции погрешности угловой координаты робота-уборщика при его временной остановке (шаг S11).
В то же самое время режим работы робота-уборщика не является режимом компенсации ухода для коррекции значения ухода гиродатчика, так как робот-уборщик выполняет операцию уборки или операцию подзарядки (шаг S12).
Затем определяется, завершена ли операция уборки робота-уборщика. Если операция уборки не завершена, то происходит возврат к шагу S11, чтобы определить, находится ли робот-уборщик в режиме компенсации ухода (шаг S13).
Режим компенсации ухода осуществляют при временной остановке робота-уборщика или в различных ситуациях по мере необходимости. То есть, только когда робот-уборщик находится в остановленном состоянии, значение ухода гиродатчика может быть скомпенсировано без прерывания операции уборки и операции подзарядки. Соответственно, согласно настоящему изобретению, предпочтительно временно останавливать робот-уборщик в нижеследующих трех случаях и осуществлять режим компенсации ухода (шаг S13).
Во-первых, когда робот-уборщик начнет уборку, предпочтительно осуществлять режим компенсации ухода после того, как робот-уборщик временно остановится.
Например, после временной остановки робота-уборщика режим компенсации ухода осуществляют тогда, когда робот-уборщик осуществляет уборку вдоль стены (например, стены жилой комнаты в доме), а также тогда, когда операцию уборки выполняют по определенной схеме на основе карты, или тогда, когда робот-уборщик передвигается к зарядному устройству, а аккумулятор робота-уборщика подзаряжается после завершения операции уборки.
Во-вторых, режим компенсации ухода предпочтительно осуществлять через заданные временные интервалы. Например, режим компенсации ухода осуществляют по истечении заданного времени (например, 10 минут), а робот-уборщик временно останавливают, в то время как операцию уборки осуществляют на каждом шаге. То есть, когда робот-уборщик временно останавливают, чтобы изменить его направление из текущего положения по истечении заданного времени, значение ухода гиродатчика компенсируют, что приводит к минимизации погрешности угловой координаты робота-уборщика.
В-третьих, режим компенсации ухода предпочтительно осуществлять, когда робот-уборщик временно останавливают для изменения направления в процессе операции уборки. Например, когда робот-уборщик поворачивается в своем первоначальном положении, чтобы изменить свое направление, а также при кратковременной остановке для изменения направления поворота в начальной точке и в конечной точке. В этот момент выходной сигнал гиродатчика соответствует действительному значению ухода гиродатчика при угловой скорости, равной 0. Одновременно получают выборочное среднее значение ухода гиродатчика, и, если разница между полученным средним выборочным значением и значением ухода гиродатчика, использованным для вычисления угловой скорости, очень большая, предпочтительно останавливать робот-уборщик на заданное время и осуществлять режим компенсации. Выборочное среднее значение ухода гиродатчика получают по нижеследующему уравнению
где S - число выборок величин выходных сигналов гиродатчика, которые могут быть взяты, когда робот-уборщик мгновенно останавливается; Gi - величина выходного сигнала гиродатчика при мгновенной остановке робота-уборщика и Gуход, выборка - средняя величина выходного сигнала гиродатчика при мгновенной остановке робота-уборщика.
Соответственно, если разность между средним значением (Gуход, выборка) ухода гиродатчика, вычисленным по уравнению (3), и значением ухода (Gуход) гиродатчика, используемого для вычисления действительной угловой скорости, очень значительна, это означает, что действительное значение ухода гиродатчика изменилось. Когда значение ухода гиродатчика изменяется, робот-уборщик временно останавливают и осуществляют компенсацию ухода.
Далее, если режим работы робота-уборщика меняется на режим компенсации ухода, робот-уборщик оставляют в неподвижном состоянии (шаг S14) и определяют значение ухода гиродатчика. То есть, когда робот-уборщик временно остановлен, отбирают заданное число величин выходного сигнала гиродатчика (шаг S15). В этом случае, когда робот-уборщик остановлен (то есть, когда угловая скорость равна 0), величина выходного сигнала гиродатчика становится значением ухода гиродатчика. При этом, поскольку при измерении всегда существует шумовая составляющая, и значение ухода меняется со временем, предпочтительнее использовать среднее значение и стандартное отклонение для получения точного значения ухода гиродатчика.
При определении значения ухода гиродатчика получают среднее из полученных значений ухода гиродатчика и стандартное отклонение. Среднее значение и стандартное отклонение вычисляют по нижеприведенному уравнению (4). То есть, уравнение (4) служит для получения средней величины выходного сигнала гиродатчика и стандартного отклонения при временной остановке робота-уборщика.

где mG,1 - средняя величина выходного сигнала гиродатчика, N - число выборок сигнала гиродатчика, Gi - величина выходного сигнала гиродатчика, σ G,1 - стандартное отклонение величины выходного сигнала гиродатчика (шаг S16).
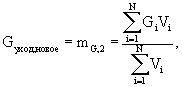
Затем значения ухода гиродатчика за вычетом шума усредняют на основе стандартного отклонения, а в качестве усредненного значения ухода принимают новое значение ухода гиродатчика (Gуход, новое). Новое значение ухода гиродатчика (Gуход, новое) вычисляют по нижеследующему уравнению (5). То есть, уравнение (5) служит для получения среднего значения ухода гиродатчика без учета вероятного шума, а полученное среднее значение становится новым значением ухода гиродатчика (шаг S17).
где mG,2 - среднее значение ухода гиродатчика без учета шума, a Gi - значение ухода гиродатчика. Когда угловая скорость равна 0, величина выходного сигнала гиродатчика соответствует значению ухода гиродатчика.
Кроме того, если значение ухода гиродатчика представляет собой вероятный шум, величина Vi равна 0 или, в противном случае, равна 1. То есть, если |Gi-mG,1|<k1·σ G,1, то Vi равно 1, и если |Gi-mG,1|≥ k1·σ G,1, то Vi равно 0. В то же самое время угловую скорость (ω n) вычисляют на основе нового значения ухода гиродатчика (Gуход, новое). А именно - угловая скорость ω n=C(Gn-Gуход, новое).
После чего угловые скорости (ω n), вычисленные на основе нового значения ухода гиродатчика, складывают с накоплением и по уравнению Ψ n+1=Ψ nω n·Δt вычисляют угол поворота робота-уборщика. Затем вычисленный угол поворота вычитают из ранее вычисленного угла поворота, а полученный в результате вычитания угол поворота компенсируют, чтобы тем самым уменьшить погрешность угловой координаты робота-уборщика. Это означает, что всегда при определении нового значения ухода гиродатчика угол поворота компенсируют в соответствии с изменением ухода гиродатчика, тем самым уменьшая погрешность угловой координаты робота-уборщика (шаг S18).
Далее будет подробно описан способ расчета угла поворота робота-уборщика на основе нового значения ухода гиродатчика и компенсации вычисленного угла поворота со ссылками на фиг.4А-4D.
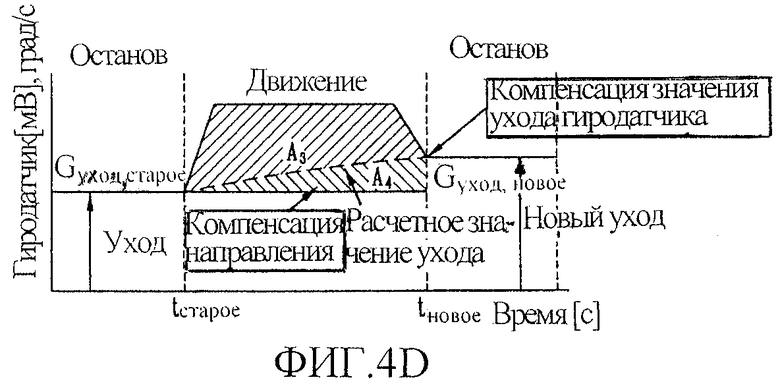
На фиг.4А-4D показаны процессы компенсации угла поворота на основе нового значения ухода гиродатчика согласно предпочтительному примеру осуществления настоящего изобретения.
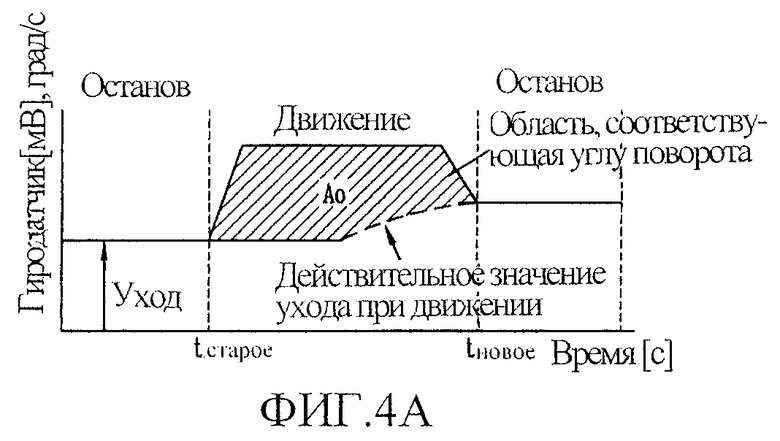
Согласно фиг.4А, когда робот-уборщик движется в положение останова, в процессе его движения значение ухода гиродатчика меняется в течение временного интервала от tстарое до tновое. Заштрихованная область показывает действительный угол поворота робота-уборщика. Однако, если значение ухода гиродатчика меняется при движении робота-уборщика в течение временного интервала от tстарое до tновое, величина изменения не может быть известна. Таким образом, заштрихованная область на фиг.4А может быть точно получена с помощью гиродатчика.
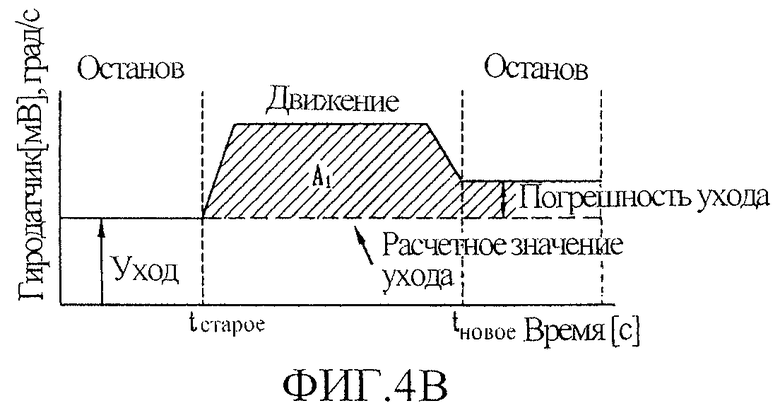
Как показано на фиг.4В, ввиду изменения значения ухода возникает погрешность угловой координаты, и робот-уборщик не может осуществлять операцию уборки из-за этой погрешности. Заштрихованная область на фиг.4В показывает угол поворота робота-уборщика, полученный путем вычисления угловых скоростей при условии, что значение ухода гиродатчика является постоянной величиной, и сложения вычисленных угловых скоростей с накоплением.
В то же самое время, погрешность угловой координаты представлена областью, получаемой путем вычитания заштрихованной области на фиг.4А из заштрихованной области на фиг 4В. То есть, погрешность угловой координаты (Еrr1=А1-А0) в соответствии с уходом гиродатчика постепенно увеличивается со временем.
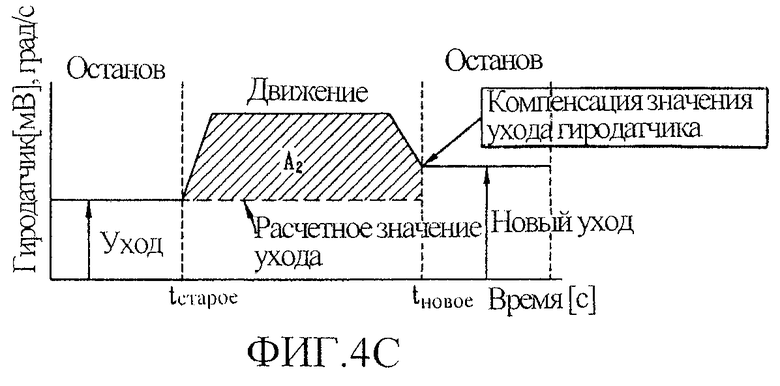
Согласно фиг.4С угол поворота вычисляют на основе значения ухода (Gуход) гиродатчика в течение временного интервала (tновое~tcтарое) до определения нового значения ухода гиродатчика (Gуход, новое), что однако не отражает значения ухода гиродатчика, изменившегося в течение временного Интервала (tновое~tстарое).
Для отражения изменившегося значения ухода гиродатчика погрешность угловой координаты робота-уборщика компенсируют на основе нового значения ухода гиродатчика. Погрешность угловой координаты при уходе гиродатчика Еrr2=А2-А0, а ее величина меньше, чем погрешность углового положения, указанная на фиг.4В.
Соответственно, как показано на фиг.4D, когда предыдущее значение ухода гиродатчика (Gуход, пред) линейно изменяется на новое значение ухода гиродатчика, вычисляют угол поворота в соответствии со значением ухода гиродатчика в течение временного интервала (tновое~tстарое), вычисленный угол поворота вычитают из угла поворота в соответствии с ранее вычисленным значением ухода гиродатчика, и полученный в результате вычитания угол поворота компенсируют, таким образом уменьшая погрешность угловой координаты робота-уборщика. Скомпенсированный угол поворота получают по нижеследующему уравнению (6):

где Ψ n+1 - скомпенсированный угол поворота робота-уборщика, Ψ n+1,пред - угол поворота робота-уборщика до компенсации и Ψ компенсация - поправочный угол поворота робота-уборщика, Ψ компенсация соответствует А4 на фиг.4D, и в этом случае, погрешность угловой координаты в соответствии с уходом гиродатчика равна Еrr3=А3-А0=(A2-А4)-А0. То есть, погрешность угловой координаты робота-уборщика можно выразить надлежащим образом в соответствии с фиг.4A-4D в виде: Еrr1>Err2>Еrr3.
Кроме того, согласно настоящему изобретению погрешность угловой координаты робота-уборщика может быть уменьшена путем компенсации значения ухода различных датчиков, следящих за угловой скоростью робота-уборщика.
Как указано выше, способ компенсации погрешности угловой координаты робота-уборщика в соответствии с настоящим изобретением имеет следующие преимущества.
Например, значение ухода гиродатчика, следящего за угловой скоростью робота-уборщика, находят всегда, когда робот-уборщик временно останавливается, и компенсируют найденное значение ухода гиродатчика, вследствие чего погрешность угловой координаты робота-уборщика может быть уменьшена.
Кроме того, значение ухода гиродатчика робота-уборщика находят, когда оно резко изменяется при временной остановке робота-уборщика по истечении некоторого времени или когда изменяется шаг уборки. Соответственно, значение ухода может быть точно найдено, и таким образом погрешность угловой координаты в соответствии с изменением ухода гиродатчика может быть минимизирована.
Поскольку настоящее изобретение может быть осуществлено в нескольких видах без отступления от его сущности или существенных признаков, следует иметь в виду, что вышеописанные примеры осуществления не ограничены какими-либо подробностями, содержащимися в вышеприведенном описании, если это особо не оговорено, но скорее должны пониматься в широком смысле в соответствии с их сущностью и объемом, приведенных в формуле изобретения, а следовательно, все изменения и модификации, находящиеся в пределах данной формулы или эквивалентных признаков, должны пониматься как охваченные прилагаемой формулой изобретения.
Изобретение относится к роботам-уборщикам. Описывается способ компенсации погрешности угловой координаты робота-уборщика для уменьшения погрешности угловой координаты робота-уборщика путем компенсации ухода гиродатчика робота-уборщика. Способ включает нахождение значения ухода датчика для определения угловой скорости робота-уборщика, компенсацию найденного значения ухода и коррекцию угловой координаты робота-уборщика на основе скомпенсированного значения ухода. Технический результат - уменьшение погрешности угловой координаты робота-уборщика путем компенсации значения ухода гиродатчика робота-уборщика. 2 н. и 19 з.п. ф-лы, 4 ил.
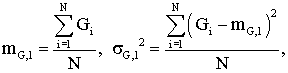
где mG,1 - средняя величина выходного сигнала гиродатчика; N - число выборок для гиродатчика; Gi - величина выходного сигнала гиродатчика; σ G,1 - стандартное отклонение величины выходного сигнала гиродатчика.
где mG,2 - среднее значение ухода при устраненных шумах; Gi - величина выходного сигнала гиродатчика, при этом, если |Gi-mG,1|<k1·σ G,1, то Vi равно 1, а если |Gi-mG,1|≥ k1·σ G,1, то Vi равно 0.
где S - число выборок величин выходного сигнала гиродатчика, которое может быть взято при мгновенной остановке робота-уборщика, Gi - величина выходного сигнала гиродатчика при мгновенной остановке робота-уборщика, Gуход, выборка - среднее значение для величин выходного сигнала гиродатчика при мгновенной остановке робота-уборщика.
где mG,1 - средняя величина для величин выходного сигнала гиродатчика, N - число выборок для гиродатчика, Gi - величина выходного сигнала гиродатчика, σ G,1 - стандартное отклонение величины выходного сигнала гиродатчика.
где mG,2 – среднее значение для величин выходного сигнала при устраненных шумах, Gi - величина выходного сигнала гиродатчика, и, если |Gi-mG,1|<k1·σ G,1, то Vi, равно 1, а если |Gi-mG,1|≥ k1·σ G,1, то Vi равно 0.
где Ψ n+1 - скомпенсированный угол поворота робота-уборщика, Ψ n+1, пред. - угол поворота робота-уборщика до компенсации и Ψ компенсация - поправочный угол поворота робота-уборщика.
| US 5646494 А, 08.07.1997 | |||
| ГОРЕНШТЕЙН И.А | |||
| и др | |||
| Инерциальная навигация | |||
| - М.: Сов | |||
| радио, 1962, с | |||
| Автоматическая акустическая блокировка | 1921 |
|
SU205A1 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
| US 5440216 A, 08.08.1995 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 6527071 B1, 04.03.2003 | |||
| Устройство управления самоходным средством | 1988 |
|
SU1689921A1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 1995 |
|
RU2107897C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| Способ измерения дрейфа гироинерциальных систем | 1991 |
|
SU1838761A3 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |

