Изобретение относится к весоизмерительной технике и может быть использовано для дозирования сыпучих материалов и порционного взвешивания больших масс сыпучих продуктов, например зерна в элеваторе.
Известен способ весового дозирования сыпучих материалов с предварительным дозированием, что повышает точность взвешивания (см., напр., Авт. свид. СССР №81051, Мкл. G 01 G 13/04, заявл. 15.04.49 г.) По существу любое взвешивающее устройство, имеющее питатель порционного действия, напр. ковшовый транспортер, осуществляет предварительное объемное дозирование (см., напр., Гаузнер С.И. и др. Измерение массы, объема и плотности. М. Изд. стандартов, 1972 г., стр.608).
Недостатком этих технических решений является то, что эти способы взвешивания не учитывают при предварительном дозировании изменения физических параметров взвешиваемого продукта, что усложняет процесс весового дозирования, т.е. цель предварительного дозирования достигается лишь частично.
Известен способ весового порционного дозирования, по которому непрерывно измеряют плотность потока материала и скорость измерения этой величины, по которым измеряют массу материала в падающем столбе потока материала, а затем суммируют с сигналом, пропорциональным массе материала в грузоприемном узле, по результату суммирования определяют вес дозируемой порции (см., напр., Авт. свид. СССР №1755058, Мкл. G 01 G 13/04, заявл. 20.07.90 г.).
Недостатками этого технического решения являются сложность, недостаточная точность и малая производительность, что обусловлено наличием двух предварительных дозаторов различной производительности, причем окончательную досыпку материала осуществляют при работе только одного досыпочного потока, и сложностью расчетного алгоритма, включающего тринадцать коэффициентов. Кроме того, величину давления падающего материала на весоприемное устройство определяют косвенным путем, через ускорение свободного падения. Погрешность измерения при этом способе измерения обратно пропорциональна удельному весу материала.
Известен также способ весового автоматического дозирования сыпучих материалов, по которому определяют силу воздействия падающего потока материала на весоприемное устройство, а массу материала, поступающего на весоизмерительное устройство, вычисляют как разность фактической силы давления потока на весоприемное устройство и сигнала коррекции, "уровень которого устанавливается задатчиком" уровня динамического давления (см., напр., авт. свид. СССР №1527511, Мкл. G 01 G 13.04, заявл. 29.03.88). Естественно, что этот способ не предусматривает автоматической коррекции дозирования, которая бы учитывала изменения физических параметров материала. По этому способу требуемая точность достигается применением основного и досыпочного питателей. Последний работает медленно, что увеличивает время дозирования. Это обстоятельство отмечено в описании изобретения.
Целью изобретения является упрощение реализующего устройства, повышение точности и скорости дозирования сыпучих продуктов. С этой целью в способе порционного взвешивания сыпучих продуктов в потоке с предварительным дозированием при взвешивании каждой предварительно дозированной порции продукта измеряют скорость нарастания силы давления продукта на весоприемное устройство, запоминают величину скорости нарастания силы давления в период ее линейного нарастания при взвешивании первой порции, вычисляют отношение скорости нарастания силы давления продукта на весоприемное устройство в период ее линейного нарастания при взвешивании каждой последующей порции к запомненной скорости нарастания силы давления продукта при взвешивании первой порции и изменяют предварительно дозируемую величину порции продукта обратно пропорционально этому отношению в очередном последующем цикле дозирования, при взвешивании каждой порции определяют момент достижения первого нулевого значения скорости нарастания силы давления продукта на весоприемное устройство, начиная с которого величину истинного значения веса порции определяют как математическое ожидание среднего значения давления на весоприемное устройство после загрузки этой порции.
Соответственно в устройство для порционного взвешивания, содержащее установленные последовательно предварительный дозатор и весоприемное устройство с тензометрическим преобразователем давления, блок индикации, введены вычислитель, измеритель заполнения предварительного дозатора, регулятор заполнения предварительного дозатора, выходы преобразователя давления и измерителя заполнения предварительного дозатора подключены соответственно к первому и второму входам вычислителя, первый выход которого подключен ко входу регулятора заполнения предварительного дозатора, второй выход вычислителя подключен ко входу блока индикации, третий и четвертый выходы вычислителя подключены соответственно к управляющим входам предварительного и весового дозаторов.
Сущность изобретения поясняется чертежами.
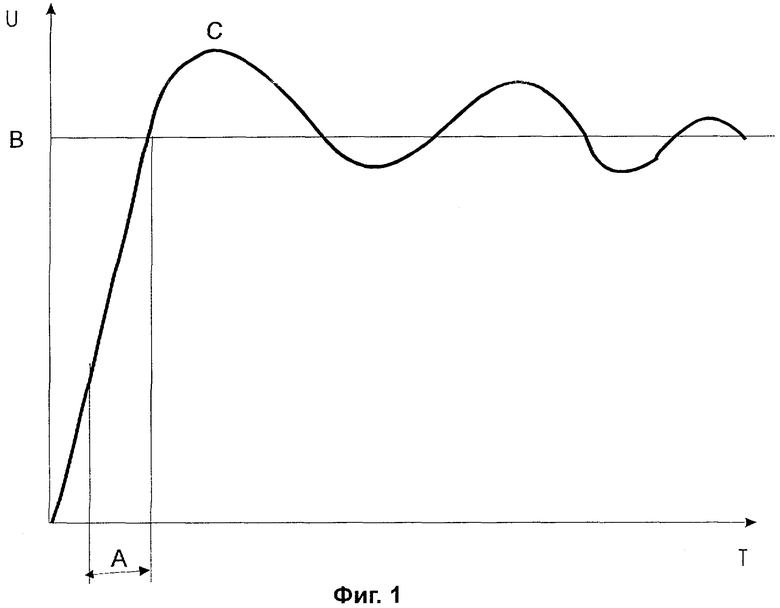
На фиг.1 показана временная диаграмма давления продукта на весоприемное устройство при его загрузке взвешиваемым продуктом, на фиг.2 показан пример реализации устройства, работающего по предлагаемому способу.
Устройство для порционного взвешивания содержит установленные последовательно предварительный дозатор 1 и весоприемное устройство 2 с тензометрическим преобразователем 3 давления, блок 4 индикации, вычислитель 5, измеритель 6 заполнения предварительного дозатора 1, регулятор 7 заполнения предварительного дозатора 1, выходы преобразователя 3 давления и измерителя 6 заполнения предварительного дозатора 1 подключены соответственно к первому 8 и второму 9 входам вычислителя 5, первый выход 10 которого подключен ко входу регулятора 7 заполнения предварительного дозатора 1, второй выход 11 вычислителя 5 подключен ко входу блока 4 индикации, третий 12 и четвертый 13 выходы вычислителя 5 подключены соответственно к выходным шиберам 14 и 15 предварительного 1 и весового 2 дозаторов.
В предлагаемом устройстве предлагаемый способ реализуется в процессе работы следующим образом:
В исходном состоянии устройство не содержит какого-либо продукта, а предварительный дозатор 1 с помощью регулятора 7 заполнения дозатора 1 устанавливается на требуемое количество сыпучего продукта. В частности, эта регулировка для объемного дозатора может быть обеспечена, например, контролем уровня его заполнения или изменением его рабочего объема.
Необходимо подчеркнуть, что в соответствии с изобретением только весоприемное устройство 2 (дозатор) должно быть выполнено весовым, а предварительный дозатор 1 может иметь различное выполнение. Заявитель считает необходимым отметить, что существо предложения не изменится, если в устройстве будут использованы несколько поочередно работающих предварительных дозаторов. Объемный дозатор приведен только в качестве простейшего примера реализации.
По команде "пуск" срабатывает регулятор 7 заполнения (показанный в виде шибера на чертеже) и сыпучий продукт из бункера заполняет объем предварительного дозатора 1. При этом сигнал с выхода измерителя 6 заполнения дозатора 1 поступает на вход 9 вычислителя 5, который формирует команду на закрытие регулятора 7 заполнения и открывает выходное отверстие предварительного дозатора 1 сигналами, поступающими соответственно с его выходов 10 и 12, так что сыпучий материал падает в весоприемное устройство 2. При этом давление продукта на весоприемное устройство 2 контролируется тензометрическим преобразователем 3 и поступает на вход 8 вычислителя 5, где вычисляется и запоминается скорость нарастания давления, т.е. производная от величины сигнала на линейном участке "А" временной диаграммы фиг.1, который соответствует активной загрузке весового дозатора 2. Так как давление падающего продукта на весоприемное устройство носит ударный характер, то выходной сигнал преобразователя 3 по окончании загрузки весового дозатора 2 имеет вид затухающего колебания. В вычислителе 5 определяют момент "С" - это момент первого нулевого значения скорости нарастания давления продукта на весоприемное устройство. Нулевое значение скорости нарастания веса означает, что вес продукта в весоприемном устройстве 2 не увеличивается, т.е. процесс перегрузки продукта из предварительного дозатора 1 в весоприемное устройство 2 завершен. В этот момент формируется команда на закрытие выходного отверстия предварительного дозатора 1 и открывание регулятора 7 соответствующими командами, поступающими с выходов 12 и 10 вычислителя 5, что обеспечивает заполнение предварительного дозатора 1 новой порцией продукта. С этого же времени вычисляется нулевой уровень, точнее математическое ожидание "В" колебаний сигнала преобразователя 3. Вычисление этого уровня, соответствующего фактическому весу порции продукта, может производиться различными методами, и выбор метода не имеет отношения к предлагаемому техническому решению. Следует заметить только, что вычисление этого уровня с необходимой точностью может быть произведено до успокоения измерительной системы весоприемного устройства 2, что обеспечивает более быстрое завершение процесса взвешивания порции продукта. По окончании определения истинного значения веса порции продукта вычислитель 5 выдает соответствующую команду с выхода 13 на выходной шибер 15 весового дозатора 2 на удаление продукта из весового дозатора 2, а сигнал с выхода 11 обеспечивает индикацию веса порции продукта в блоке 12 индикации. Последующие циклы работы устройства отличаются от вышеизложеного только тем, что вычислитель 5 производит вычисление отношения скорости нарастания давления продукта на весоприемное устройство при взвешивании данной порции на линейном участке "А" временной диаграммы к запомненной скорости нарастания давления продукта на этом же участке при взвешивании первой порции и изменяет предварительно дозируемую величину порции продукта обратно пропорционально этому отношению с помощью команды, подаваемой с выхода 10 на регулятор 7 заполнения предварительного дозатора 1. Так как изменение плотности продукта, например, за счет изменения влажности приводит к изменению веса порции продукта и одновременно к сответствующему изменению скорости нарастания силы давления на весоприемное устройство (участок "А" на фиг.1), то изменение объема предварительного дозатора 1 в соответствии с указанными операциями предлагаемого способа поддерживает величину веса порции продукта постоянной, что позволяет дополнительно сократить время определения истинного значения веса порции и повысить стабильность веса порций продукта. В связи с тем, что выполнение вычислителя 5 может быть реализовано различными, как аппаратными, так и программными, методами известными путями с помощью известных средств, причем различное его выполнение не имеет отношения к существу данного предложения, конкретная реализация вычислителя 5 в заявке не приводится.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРЦИОННОГО ВЗВЕШИВАНИЯ СЫПУЧИХ ПРОДУКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369846C1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1500852A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| СПОСОБ ВЕСОВОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2005 |
|
RU2287136C1 |
| Способ управления процессом порционного дозирования сыпучего материала | 1985 |
|
SU1307242A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕСА | 2004 |
|
RU2286554C2 |
| Устройство автоматического управления весовым порционным дозатором | 1987 |
|
SU1495757A1 |
| РЕГУЛЯТОР ПРОЦЕССА ПОРЦИОННОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1991 |
|
RU2065199C1 |
| Автоматическое устройство управления весовым порционным дозатором | 1991 |
|
SU1837265A1 |
| Весовой дозатор непрерывногодЕйСТВия | 1978 |
|
SU794390A1 |
Изобретение относится к весоизмерительной технике и может быть использовано для дозирования сыпучих продуктов в потоке и порционного взвешивания больших масс сыпучих продуктов. Способ заключается в следующем. При взвешивании каждой предварительно дозированной порции продукта измеряют скорость нарастания силы давления продукта на весоприемное устройство и запоминают величину скорости нарастания силы давления в период ее линейного нарастания при взвешивании первой порции. Далее вычисляют отношение скорости нарастания силы давления продукта на весоприемное устройство в период ее линейного нарастания при взвешивании каждой последующей порции к запомненной скорости нарастания силы давления продукта при взвешивании первой порции. При этом изменяют предварительно дозируемую величину порции продукта обратно пропорционально этому отношению в очередном последующем цикле дозирования. При взвешивании каждой порции определяют момент достижения первого нулевого значения скорости нарастания силы давления продукта на весоприемное устройство, начиная с которого величину истинного значения веса порции определяют как математическое ожидание среднего значения давления на весоприемное устройство после загрузки этой порции. Устройство для осуществления способа содержит установленные последовательно в потоке предварительный дозатор и весовой дозатор с тензометрическим преобразователем силы, блок индикации, вычислитель, измеритель заполнения предварительного дозатора, регулятор заполнения предварительного дозатора. Выходы преобразователя давления и измерителя заполнения предварительного дозатора подключены соответственно к первому и второму входам вычислителя, первый выход которого подключен ко входу регулятора заполнения предварительного дозатора, второй выход вычислителя подключен ко входу блока индикации, третий и четвертый выходы вычислителя подключены соответственно к управляющим входам предварительного и весового дозаторов. Технический результат заключается в упрощении конструкции и повышении скорости дозирования сыпучих продуктов. 2 н.п. ф-лы, 2 ил.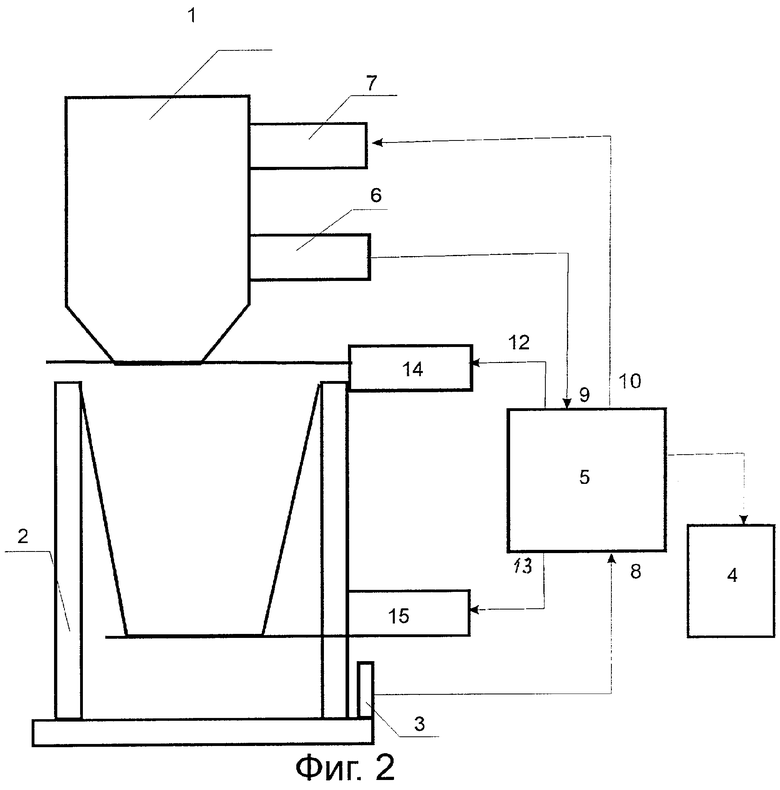
| Способ весового автоматического дозирования сыпучих материалов и устройство для его осуществления | 1988 |
|
SU1527511A1 |
| Способ весового порционного дозирования и устройство для его осуществления | 1990 |
|
SU1755058A1 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1174769A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |

