Изобретение относится к системам управления тормозами транспортных средств, в частности к способам и устройствам, регулирующим тормозное усилие колесного тормоза в зависимости от различных транспортных или дорожных условий, например способы и устройства для ограничения или изменения распределения тормозного усилия между колесами.
Известен способ автоматического управления колесными тормозами (SU 1009843, МПК В 60 Т 8/00. В.Р.Асадченко, В.Ф.Пестерев. Способ автоматического управления колесными тормозами. - Опубл. 07.04.83. - Бюл. 13), заключающийся в том, что он позволяет периодически на каждом участке торможения устанавливать давление в тормозных цилиндрах в соответствии с силой сцепления.
Недостатком способа является недоиспользование сил сцепления колеса с контактной поверхностью и их взаимный повышенный износ.
Известен способ адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой (SU 1772022, МПК В 60 Т 8/00. В.Г.Иноземцев, В.Р.Асадченко, В.Ф.Пестерев, В.В.Ляной, Л.В.Козюлин и М.В.Яковлев. Способ адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой. - Опубл. 30.10.92. - Бюл. №40) - прототип, заключающийся в том, что антиблокировочной системой осуществляют установленным темпом повышение давления рабочей среды в соответствующем тормозном цилиндре задающего колесного тормоза до превышения допустимой величины скольжения колеса (юза или срыва сцепления) и запоминают давление, при котором это произошло, после чего это давление установленным темпом понижают, выполняя антиблокировочный цикл, до перехода задающего колеса (или оси) к ускорению его вращения, а затем удерживают давление на достигнутом уровне до возникновения допустимой величины скольжения (выхода из юза), после чего осуществляют повышение давления ускоренным темпом до уровня, на установленную величину меньшего (установленный уровень понижения давления после антиблокировочного цикла для задающего колеса), чем запоминаемый уровень давления, при котором в предшествующем антиблокировочном цикле скольжение превысило допустимую величину, и удерживают давление на таком уровне в течение времени прохождения транспортным средством установленного отрезка тормозного пути, после чего установленным темпом вновь осуществляют повышение давления до превышения допустимой величины скольжения задающего колеса и далее антиблокировочный цикл повторяют, при этом в установленном режиме ведут торможение одного задающего колеса (или оси) транспортного средства, а все другие контролируемые колеса (или оси) тормозят индивидуально аналогичным образом, при этом верхний уровень давления в их тормозных цилиндрах всегда ограничивают величиной, на установленное значение меньшей (установленный уровень понижения давления для контролируемых колес) предшествующего ей верхнего уровня давления в тормозном цилиндре задающего колеса (для других подвижных единиц в транспортном средстве с учетом различной нагрузки, приходящейся на колесо или ось, и параметров их тормозных систем). Если срыв сцепления (юз) возникнет преждевременно (самопроизвольно) до проезда установленного отрезка пути задающим или контролируемым колесами, то давление в соответствующем тормозном цилиндре изменяют по антиблокировочному циклу с понижением уровня запоминаемого давления до достигнутого перед последним входом в юз задающего колеса.
При этом на участках с пониженным сцеплением вводится пропорциональная связь между уровнем запоминаемого давления, достигнутым задающим колесом или осью, и устанавливаемым отрезком тормозного пути для удержания давления. Кроме того, колеса или оси транспортного средства используют по очереди в качестве задающих. В начале движения транспортного средства выявляют колесо или ось, находящиеся в наихудших условиях по скольжению, и используют их в качестве задающего. После прохождения транспортным средством в режиме торможения установленного участка пути выявляют колесо (или ось), бывшее ранее задающим и имевшее на предыдущем участке пути наибольшее скольжение, и используют его в качестве задающего колеса (или оси). По указанному способу в качестве задающих используют колеса или оси, которые за время прохождения установленной величины участка тормозного пути накопили суммарное скольжение меньше критического.
Недостатком данного способа является то, что, хотя он и позволяет определить максимальный уровень сцепления колеса с контактной поверхностью, но не обеспечивает антиблокировочной системе возможность индивидуальной, зависящей от свойств сцепления, подстройки под этот уровень, например, путем корректировки установленной величины понижения давления и установленного отрезка тормозного пути его выдержки. Это объясняется тем, что пропорциональная связь между уровнем запоминаемого давления и установленным отрезком тормозного пути для удержания давления на участках с любым сцеплением не является оптимальной, так как случайный процесс реализации сцепления колес с контактной поверхностью подчиняется не линейной закономерности, а нормальному (Гауссову) закону распределения вероятности (Исаев И.П. Случайные факторы и коэффициент сцепления. - М.: Транспорт, 1970. 184 с.).
Поэтому предложенная линейная связь будет вызывать более частые преждевременные срывы сцепления (юз) задающих, а также других контролирумых колес (или колесных пар), недоиспользование сцепления колес с контактной поверхностью и их повышенный износ.
Зависимость установленного значения понижения давления после антиблокировочного цикла от нагрузки, приходящейся на колесо или ось, и параметров тормозных систем транспортных средств также не может оптимизировать процесс реализации сцепления из-за существенных колебаний уровня последнего на участке торможения.
Кроме этого, все колеса (или оси) транспортного средства используют по очереди в качестве задающих, что нецелесообразно применять для многоосных транспортных средств или поездов, потому что для каждой их последующей колесной пары (колеса), тормозящейся с проскальзыванием, уровень сцепления на участке существенно возрастает (Развитие локомотивной тяги. Под ред. Н.А.Фуфрянского, А.Н.Бевзенко - 2-е изд. - М.: Транспорт, 1988. 344 с.).
Ориентируя передние колесные пары на этот уровень задающих задних колесных пар при неизменном установленном уровне понижения давления по отношению к задающему, будет возникать более частый преждевременный переход их в юз до проследования устанавливаемого отрезка пути, что приведет к потере эффективности торможения и повышению износа колес и контактной поверхности.
Отсутствие преждевременных срывов сцепления задающего или контролируемых колес (юза) является признаком чрезмерно большого понижения давления от запоминаемого или укороченного установленного отрезка пути выдержки этого давления после антиблокировочного цикла. Наоборот, слишком частые самопроизвольные срывы сцепления - признак недостаточного понижения давления от запоминаемого и большой длины установленного отрезка пути. Для оптимального использования сцепления необходимо иметь определенное количество преждевременных срывов сцепления задающего и контролируемых колес на установленное число антиблокировочных циклов задающего колеса. Это соотношение устанавливается различным для каждого вида подвижного состава и участков пути торможения.
Целью изобретения является повышение реализуемого уровня сцепления колеса с контактной поверхностью, увеличение тормозной эффективности транспортного средства и уменьшение износа колес и контактной поверхности.
Указанная цель достигается тем, что устанавливают зависимость уровня понижения давления после антиблокировочного цикла и длины установленного отрезка пути от частоты преждевременных срывов сцепления задающих и контролируемых колес, а также ограничивают число задающих колес.
Сущностью изобретения является то, что в начале торможения устанавливают для задающего колеса максимальное значение установленного отрезка пути и минимальное значение понижения давления в тормозном цилиндре после антиблокировочного цикла, задают и контролируют допустимый диапазон количества преждевременных срывов сцепления, приходящихся на установленное количество антиблокировочных циклов, при несоответствии изменяют дискретно (на установленную величину) поочередно длину установленного отрезка пути и уровень понижения давления, доводят соотношение преждевременных срывов сцепления и количества антиблокировочных циклов до требуемого, тормозят контролируемые колеса аналогично в указанном режиме, изменяя дискретно индивидуально только минимально заданный уровень понижения давления после антиблокировочного цикла, ограничивают число задающих колес, находящихся в головной части многоосного транспортного средства и определяющих уровень сцепления на участке торможения, устанавливают допустимые границы износа колес.
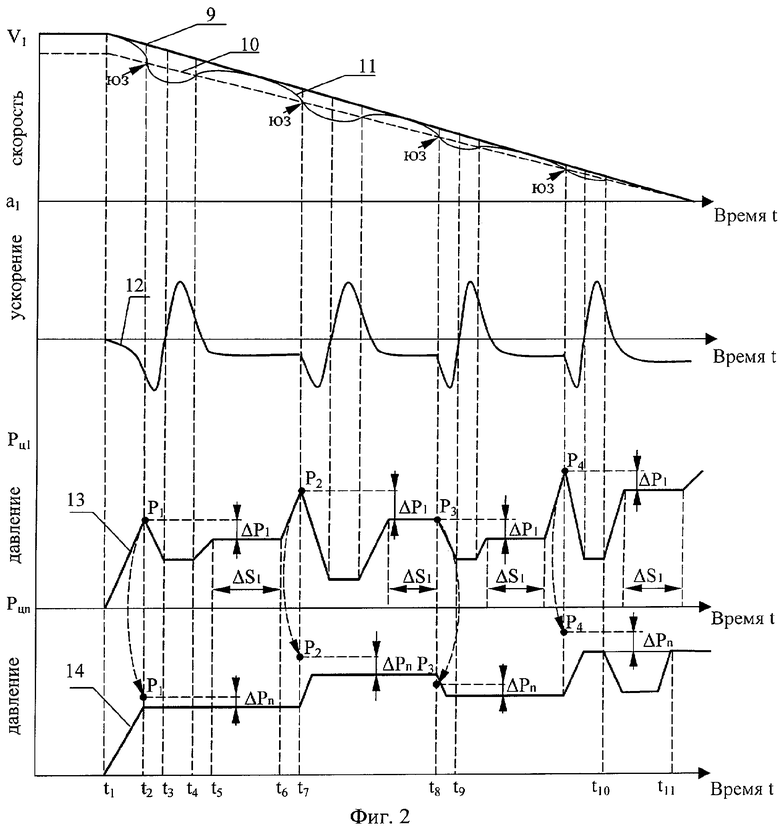
На фиг.1 и 2 соответственно приведены схема расположения основных узлов и связей антиблокировочной системы на многоосном транспортном средстве и диаграммы процессов, происходящих при торможении с этой системой.
Схема на фиг.1 включает N подвижных единиц 1 (1.1, 1.2,... 1.N) многоосного транспортного средства, объединенных информационными каналами связи 2, при этом регулятор давления рабочей среды 3 (например, трехпозиционный сбрасывающий клапан) управляет давлением в тормозном цилиндре 4 каждого колеса (или колесной пары) 5 указанного транспортного средства, оснащенного датчиками ускорения 6 и скорости 7, данные о параметрах движения от которых поступают на управляющий сбрасывающим клапаном 3 бортовой компьютер 8, каждый из которых связан в единую информационную сеть и в совокупности определяют антиблокировочную систему адаптивного управления колесными тормозами по условиям сцепления.
На фиг.2 представлены диаграммы процессов, происходящих при торможении с антиблокировочной системой на участке торможения до остановки транспортного средства за время t. Здесь кривой 9 отображено изменение во времени линейной скорости транспортного средства при торможении, кривой 10 определяются граничные значения допустимого скольжения колеса (перехода в юз и выхода из него), кривой 11 - изменение окружной скорости задающего колеса при возникновении и ликвидации его повышенного скольжения (юза), кривой 12 - изменение ускорения задающего колеса, кривой 13 - изменение давления рабочей среды в тормозном цилиндре задающего, например 1-го, колеса (или оси), кривой 14 - изменение давления рабочей среды в тормозных цилиндрах для других контролируемых колес.
Предлагаемый способ осуществляется следующим образом. В начале торможения (t1-t2) определенным темпом повышают давление рабочей среды во всех тормозных цилиндрах от 1-го до n-го. В момент времени t2, когда скольжение одного, например 1-го, колеса становится выше допустимого, повышение давления прекращают, запоминают достигнутый уровень и начинают его понижать установленным темпом, для 1-го колеса до тех пор, пока оно не перейдет к ускорению вращения (t3), а для остальных - до величины, на установленное значение ΔРn меньшей достигнутого перед переходом в юз задающего колеса. После антиблокировочного цикла (t2-t5) и выдержки времени прохождения установленного отрезка тормозного пути (t5-t6) с давлением, меньшим на установленную величину ΔP1 запоминаемого, давление в тормозном цилиндре для 1-го колеса вновь повышают до возникновения его избыточного скольжения (юза) и осуществляют очередной антиблокировочный цикл для задающего колеса. В момент времени t7 устанавливают в других тормозных цилиндрах давление меньше достигнутого для задающего колеса на установленную величину ΔРn.
Если избыточное скольжение (срыв сцепления) задающего колеса возникает раньше, чем закончится установленный отрезок пути ΔS1 или завершится антиблокировочный цикл, то давление в тормозном цилиндре задающего колеса изменяют по антиблокировочному циклу с понижением запоминаемого уровня давления до достигнутого перед входом его в юз, а давление в остальных тормозных цилиндрах уменьшают на установленную величину ΔРn (t8-t9). При возможном входе в юз незадающего колеса индивидуально выполняется указанный антиблокировочный цикл (t10-t11), a тормозной цилиндр, при его завершении, наполняется до величины, на установленное значение ΔРn меньшей достигнутой перед выполнением ближайшего антиблокировочного цикла для задающего колеса.
В процессе торможения установленную минимальную величину ΔP1 понижения давления и длину максимального установленного отрезка пути ΔS1 для задающей колесной пары дискретно поочередно корректируют таким образом, чтобы на определенное количество антиблокировочных циклов задающего колеса приходилось установленное количество его самопроизвольных переходов к избыточному скольжению (срывов сцепления) до проследования установленных отрезков пути.
Например, если преждевременных срывов сцепления задающего колеса больше, чем установлено для данного участка торможения, то вначале на установленную величину уменьшают длину отрезка пути выдержки пониженного давления. Если количество преждевременных срывов сцепления после установленного числа антиблокировочных циклов уменьшилось недостаточно для заданного диапазона, то увеличивают на определенную величину уровень понижения давления после антиблокировочного цикла и так далее до тех пор, пока количество самопроизвольных срывов сцепления не попадет в заданный диапазон. Такую же регулировку, но с обратным изменением параметров установленного отрезка пути и величины понижения давления осуществляют для увеличения числа преждевременных срывов сцепления.
Аналогично производят корректировку установленной величины ΔРn и для каждого контролируемого колеса в зависимости от частоты самопроизвольных срывов сцепления, приходящихся на определенное количество антиблокировочных циклов задающего колеса.
В качестве задающих используют ограниченное количество колес или осей в головной части многоосного транспортного средства по очереди в зависимости от наибольшей величины накопленного скольжения. После достижения колесом установленного критического значения скольжения его исключают из задающих и устанавливают допустимые границы износа таких колес.
Описанный способ адаптивного управления колесными тормозами по условиям сцепления позволяет периодически, на каждом участке торможения, устанавливать давление в тормозных цилиндрах транспортного средства в соответствии с силой сцепления и более точно подстраиваться под нее индивидуально путем постоянной корректировки установленного уровня понижения давления и длины установленного отрезка пути, а также ограничением количества задающих колес. Это повышает реализуемый уровень сцепления колеса с контактной поверхностью и тормозную эффективность транспортного средства и уменьшает износ колес и контактной поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой | 1990 |
|
SU1772022A1 |
| Устройство для автоматического управления колесными тормозами по условиям сцепления | 1982 |
|
SU1047755A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ЮЗА ТОРМОЗЯЩЕГО КОЛЕСА | 2003 |
|
RU2237587C1 |
| Устройство для автоматического регулирования колесного тормоза по условиям движения | 1987 |
|
SU1505811A1 |
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| СПОСОБ ПРОВЕРКИ ЭФФЕКТИВНОСТИ ФУНКЦИОНИРОВАНИЯ ЛОГИЧЕСКОГО МОДУЛЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМЫ ТОРМОЖЕНИЯ | 1990 |
|
RU2011582C1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2225303C1 |
| Вариатор торможения по фактическому сцеплению колеса и дороги | 1991 |
|
SU1794124A3 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
Изобретение относится к системам управления тормозами транспортных средств, в частности к способам и устройствам, регулирующим тормозное усилие в зависимости от различных условий. Способ управления колесными тормозами по условиям сцепления антиблокировочной системой с адаптивным алгоритмом включает повышение установленным темпом давления рабочей среды в тормозном цилиндре, осуществление антиблокировочного цикла, установление давления в тормозном цилиндре, выдерживание этого давления, повышение давления, повторение указанных операций, начиная с антиблокировочного цикла, торможение, определение очередности выбора колес, используемых в качестве задающих, последовательное исключение их из задающих согласно величине накопленного критического скольжения. В начале торможения устанавливают для задающего колеса максимальное значение установленного отрезка пути и минимальное значение понижения давления в тормозном цилиндре после антиблокировочного цикла. Задают и контролируют допустимый диапазон количества преждевременных срывов сцепления, приходящихся на установленное количество антиблокировочных циклов. При несоответствии изменяют дискретно на установленную величину поочередно длину установленного отрезка пути и уровень понижения давления. Доводят соотношение преждевременных срывов сцепления и количества антиблокировочных циклов до требуемого. Тормозят контролируемые колеса аналогично в указанном режиме, изменяя дискретно индивидуально только минимально заданный уровень понижения давления после антиблокировочного цикла. Ограничивают число задающих колес, находящихся в головной части многоосного транспортного средства и определяющих уровень сцепления на участке торможения, устанавливают допустимые границы износа колес. Техническим результатом является повышение реализуемого уровня сцепления колеса с контактной поверхностью, увеличение тормозной эффективности транспортного средства и уменьшение износа колес. 2 ил.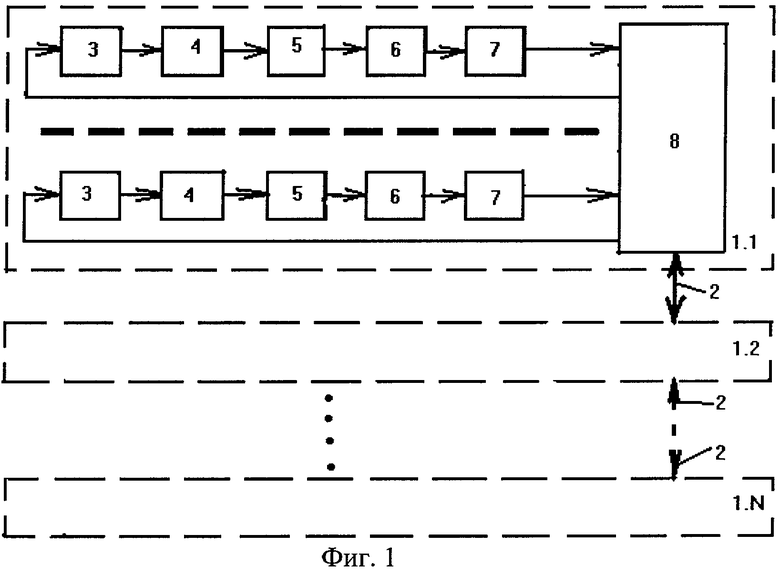
Способ управления колесными тормозами по условиям сцепления антиблокировочной системой с адаптивным алгоритмом, включающий повышение установленным темпом давления рабочей среды в тормозном цилиндре задающего колеса до превышения допустимой величины скольжения, осуществление антиблокировочного цикла, установление давления в тормозном цилиндре на заданное значение меньше того, при котором произошло превышение допустимой величины скольжения, выдерживание этого давления в течение времени проследования установленного отрезка пути, повышение давления до превышения допустимой величины скольжения колеса, повторение указанных операций, начиная с антиблокировочного цикла, торможение в указанном режиме одного задающего колеса или оси, а остальные контролируемые колеса тормозят индивидуально, согласуя максимальный уровень давления в их тормозных цилиндрах с тем, который достигался в предыдущем антиблокировочном цикле задающим колесом, определение очередности выбора колес, используемых в качестве задающих, последовательное исключение их из задающих согласно величине накопленного критического скольжения, отличающийся тем, что в начале торможения устанавливают для задающего колеса максимальное значение установленного отрезка пути и минимальное значение понижения давления в тормозном цилиндре после антиблокировочного цикла, задают и контролируют допустимый диапазон количества преждевременных срывов сцепления, приходящихся на установленное количество антиблокировочных циклов, при несоответствии изменяют дискретно на установленную величину поочередно длину установленного отрезка пути и уровень понижения давления, доводят соотношение преждевременных срывов сцепления и количества антиблокировочных циклов до требуемого, тормозят контролируемые колеса аналогично в указанном режиме, изменяя дискретно индивидуально только минимально заданный уровень понижения давления после антиблокировочного цикла, ограничивают число задающих колес, находящихся в головной части многоосного транспортного средства и определяющих уровень сцепления на участке торможения, устанавливают допустимые границы износа колес.
| Способ адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой | 1990 |
|
SU1772022A1 |
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ТУЛОВИЩА ЧЕЛОВЕКА ВО ВРЕМЯ ХОДЬБЫ | 2002 |
|
RU2219836C1 |

