Изобретение относится к способам проверки логических модулей антиблокировочных систем, в частности на железнодорожном транспорте.
Известен способ испытания систем управления торможением, согласно которому моделируют тормозной момент и момент сцепления, сравнивают эти моменты и в зависимости от результата сравнения подают на исполнительный механизм сигнал торможения либо отпуска. При достижении количеством совершенной тормозным моментом работы заданной величины прекращают моделирование торможения, получают при этом осциллограммы изменения давления в тормозной системе и значения времени торможения и длины тормозного пути (а. с. СССР N 171616, кл. С 01 М, В 64 С, 1965).
Известен более эффективный способ испытания систем управления торможением, заключающийся в том, что посредством сигнала, пропорционального угловой скорости вращения колеса, управляют физической моделью колеса, имитируя торможение. При этом повышают тормозное давление в физической модели тормозной системы и по превышению тормозным давлением величины, соответствующей срыву сцепления, уменьшают сигнал угловой скорости вращения колеса и, как следствие, замедляют вращение физической модели колеса, которая посредством инерционного датчика переключает физическую модель тормозной системы на режим отпуска и выходной сигнал последней изменяет сигнал угловой скорости вращения колеса и таким образом ускоряет вращение физической модели колеса, имитируя уменьшение скольжения, далее цикл повторяется (а. с. СССР N 200849, кл. С 01 М 17/00, 1967). Такой способ не обеспечивает достаточной точности моделирования угловой скорости колеса транспортного средства при его торможении.
Указанный недостаток не имеет место при испытании логических модулей противоблокировочных систем по способу, заключающемуся в том, что на входы испытуемого логического модуля, выходы которого подключают к соответствующим входам физической модели тормозной системы транспортного средства, подают сигналы, пропорциональные линейным скоростям вращения колес транспортного средства, причем посредством управляющего воздействия изменяют в цикле испытания эти сигналы, имитируя замедление транспортного средства при торможении. Одновременно увеличивают тормозное давление в физической модели тормозной системы и, как следствие, скольжение колеса, в результате чего логический модуль, при достижении скольжением порога его (модуля) срабатывания переключает на режим отпуска физическую модель тормозной системы, снижая тормозное давление, и выходной сигнал физической модели тормозной системы изменяет сигнал линейной скорости вращения колеса, моделируя уже уменьшение скольжения колеса, благодаря чему получают отклик логического модуля, а система приходит в исходное состояние (а. с. СССР N 595650, кл. С 01 М 17/00, В 60 Т 17/22, 1978). Недостаток этого способа - низкая достоверность моделирования скольжения и антиблокировочного цикла, т. к. сигнал обратной связи система получает с датчика тормозного давления, а не с датчика скольжения. Таким образом, не учитывается коэффициент сцепления колеса с опорной поверхностью (рельсом), при изменении которого будет изменяться скольжения. Также не учитывается задержка, вносимая механическими элементами тормозной системы транспортного средства.
Цель изобретения - повышение точности проверки эффективности функционирования логического модуля антиблокировочной системы торможения.
Поставленная цель достигается тем, что посредством модуля скоростей формируют сигнал, пропорциональный скорости транспортного средства, и сигнал, величину которого изменяют пропорционально скорости скольжения колеса. Сигнал на выходе модуля скоростей формируют путем модуляции сигнала линейной скорости транспортного средства сигналом скорости скольжения колеса, а при появлении выходного сигнала проверяемого логического модуля измеряют уровни сигналов, соответствующих текущим значениям скорости и ускорения скольжения колеса и скорости и ускорения транспортного средства, для сравнения с нормативными значениями. Сигнал скорости скольжения колеса формируют, изменяя во времени его величину по функциональной, например кубической зависимости. Выходной сигнал проверяемого логического модуля передают на управляющий вход модели тормозного механизма с регулируемой временной задержкой, уровень сигнала линейной скорости транспортного средства изменяют по закону, заданному в начале цикла проверки, а при проверке логического модуля с числом каналов, равным числу контролируемых колес. Сигналы скоростей скольжения колес формируют детерминированно для каждого колеса.
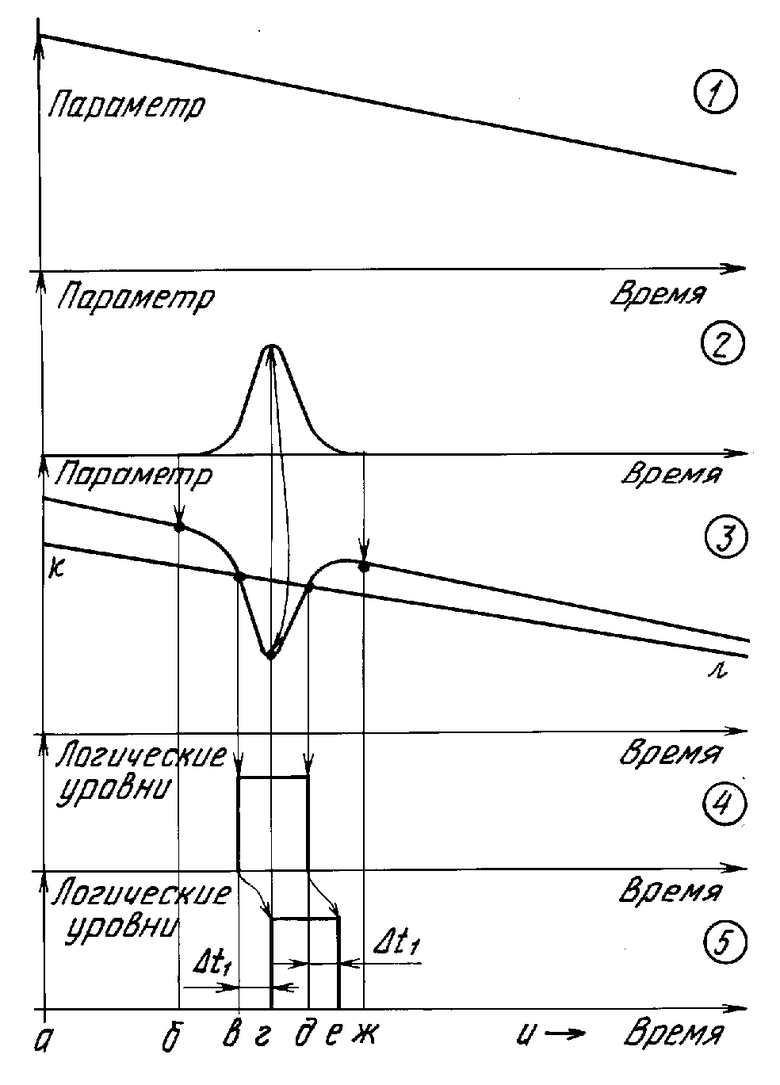
На чертеже показан цикл проверки логического модуля
1 - сигнал скорости транспортного средства, 2 - сигнал скольжения; 3 - сигнал линейной скорости колеса; - отклик логического модуля; 5 - выходной сигнал электронной модели тормозного механизма;
а - начало моделирования торможения транспортного средства; б - начало моделирования развития юза; в - срабатывание логического модуля; г - переключение электронной модели тормозного механизма в режим отпуска, начало моделирования ликвидации юза; д - выключение логического модуля; е - переключение электронной модели тормозного механизма в исходное состояние - в режим торможения; ж - окончание моделирования ликвидации юза; и - конец цикла проверки логического модуля, отрезки а-б, ж-и - моделирование безъюзового торможения; отрезок б-г - моделирование развития юза; отрезок г-ж - моделирование ликвидации юза; линия к-л - порог срабатывания логического модуля; Δt1, Δt2 - задержка, вносимая электронной моделью тормозного механизма.
Изобретение осуществляется следующим образом. Моделируется цикл торможения с помощью модуля скоростей и модели тормозного механизма, при котором в начале цикла проверки модель тормозного механизма приводят в режим торможения. Затем формируют посредством модуля скоростей сигнал, физически тождественный реальному сигналу, пропорциональному линейной скорости вращения колеса, и подают его на вход проверяемого логического модуля. Величину этого сигнала изменяют по заданной зависимости, моделируя замедление транспортного средства с возрастанием или отсутствием абсолютного скольжения колеса, при появлении сигнала на выходе проверяемого логического модуля, свидетельствующего о достижении контролируемым параметром порогового уровня, указанный выходной сигнал передают на управляющий вход модели тормозного механизма и тем самым переводят ее в режим отпуска. С помощью сигнала обратной связи, формируемого моделью тормозного механизма, переключают модуль скоростей на формирование сигнала линейной скорости вращения колеса, изменение которого соответствует уменьшению абсолютного скольжения колеса. Модель тормозного механизма переводят в исходное состояние, причем для повышения точности проверки посредством модуля скоростей формируют сигнал, пропорциональный скорости транспортного средства, и сигнал, величину которого изменяют пропорционально скорости скольжения колеса. Сигнал на выходе модуля скоростей формируют путем модуляции сигнала линейной скорости транспортного средства сигналом скорости скольжения колеса. При появлении выходного сигнала проверяемого логического модуля измеряют уровни сигналов, соответствующих текущим значениям скорости и ускорения скольжения колеса и скорости и ускорения транспортного средства, для сравнения с нормативными значениями. Сигнал скорости скольжения колеса формируют, изменяя во времени его величину по функциональной, например кубической зависимости. Выходной сигнал проверяемого логического модуля передают на управляющий вход модели тормозного механизма с регулируемой временной задержкой. Уровень сигнала линейной скорости транспортного средства изменяют по закону, заданному в начале цикла проверки. При проверке логического модуля с числом каналов, равным числу контролируемых колес, сигналы скоростей скольжения колес формируют детерминированно для каждого колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления колесными тормозами по условиям сцепления | 1982 |
|
SU1047755A1 |
| Устройство для автоматического регулирования колесного тормоза по условиям движения | 1987 |
|
SU1505811A1 |
| Способ адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой | 1990 |
|
SU1772022A1 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЕСНЫМИ ТОРМОЗАМИ ПО УСЛОВИЯМ СЦЕПЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ С АДАПТИВНЫМ АЛГОРИТМОМ | 2005 |
|
RU2284273C1 |
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| Устройство для выявления юза и боксования колес транспортного средства | 1984 |
|
SU1230877A1 |
| Противоблокировочное устройство пневматического тормоза колесного транспортного средства | 1986 |
|
SU1497082A1 |
| Устройство для выявления юза и буксования колес транспортного средства | 1983 |
|
SU1098839A1 |
| Устройство для выявления юза колес транспортного средства | 1980 |
|
SU935329A1 |
| АНТИБЛОКИРОВОЧНОЕ УСТРОЙСТВО "РОДИНА" ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2254247C1 |
Использование: на колесных транспортных средствах. Сущность изобретения: в антиблокировочной системе моделируется изменение непосредственно скольжения, при этом закон изменения максимально приближается к реальному и учитываются временные характеристики исполнительных тормозных механизмов. Способ включает моделирование торможения, моделирование возникновения скольжения, получение отклика логического модуля, временную задержку, моделирование ликвидации скольжения. Моделируются развитие и ликвидация скольжения, причем сигнал линейной скорости колеса получают путем модуляции сигнала скорости транспортного средства сигналом скольжения колеса. Сигнал скольжения изменяется по функциональной нелинейной зависимости от времени. Вводится регулируемая временная задержка начала моделирования ликвидации скольжения. Моделируются разгон транспортного средства, развитие и ликвидация буксования путем изменения знака ускорения транспортного средства и знака скольжения. 4 з. п. ф-лы. 1 ил.
