Изобретение относится к способам автоматического адаптивного управления колесными тоомозами посредством изменения давления рабочей среды в тормозных цилиндрах в зависимости от силы сцепления и может быть использовано в
тормозных системах транспортных средств, преимущественно на железнодорох;:- транспорте.
Известен способ регулирования тормозного усилил на колесе транспортного средства, заключающийся в том. что системой управления изменяют тормозное давление для достижения состояния, при котором оптимальное тормозное давление реализуется в максимальной тормозной силе на колесе, т.е. уменьшаюттормозиое давление, когда тормозное усилие, действующее на колесо, уменьшается от максимальной величины при превышении оптимального тормозного давления, и прекращают уменьшение величины тормозного усилия при падении величины тормозного давления ниже оптимального значения, причем регулирование величины тормозного давления осуществляют по сигналам, формируемым после подсчета величины гистерезиса, т.е. времени запаздывания операции регулирования в зависимости от знака производных тормозной силы и тормозного давления по времени.
Известен также способ управления колесными тормозами, заключающийся и том, что системой управления осуществляют установленным темпом повышение давпения рабочей среды в соответствующем тормозном цилиндре колесного тормоза до превышения допустимой величины скольжения колеса, после чего это давление понижают установленным темпом до перехода контролируемого колеса к ускорению его вращения, а затем удерживают давление на достигнутом уровне до достижения скольжением допустимой его величины, после чего осуществляют повышение давления ускоренным темпом и лишь до уровня, иа установленную величину меньшего запоминаемого уровня давления, при котором в предшествующем антиблокировочном цикле скольжение превысило допустимую величину.
Недостатком указанных способов является понижение тормозной эффективности и повышенный расход сжатого воздуха.
Указанный недостаток устранен в способе автоматического управления колесными тормозами, заключающемся в том, что системой управления осуществляют установленным темпом повышение давления рабочей среды в соответствующем тормозном цилиндре колесного тормоза до превышения допустимой величины скольжения колеса, после чего это давление понижают установленным темпом до перехода контролируемого колеса к ускорению его вращения, а затем удерживают давление на достигнутом уровне до достижения скольжением допустимой его величины, после чего осуществляют повышение давления ускоренным темпом и лишь до уровня, на установленную величину меньшего запоминаемого уровня давления, при котором в
предшествующем антиблокировочном цикле скольжение превысило допустимую величину, и удерживают давление на таком уровне в течение времени прохождения
транспортным средством установленного отрезка тормозного пути, после чего установленным темпом вновь осуществляют по- вышение давления до превышения допустимой величины скольжения контро0 лируемого колеса и далее антиблокировочный цикл повторяют.
Предложенный способ обладает адаптивными свойствами повышает тормозную эффективность и снижает расход воздуха по
5 сравнению с аналогом, однако осуществляет это не в полной мере, так как предусмат- ривает периодическое повышенное скольжение асех колесных пар при искусственном вводе их в юз. Поскольку колеса
0 транспортных средств в поезде при торможении проходят одни и те же участки пути, то уровень их сцепного взаимодействия, будучи выявленным одной из колесных пар, может служить ориентиром для адаптации
5 остальных (подвижной единицы или поезда), предотвращая необходимость их периодического ввода в юз
Цель изобретения - повышение тормозной эффективности транспортного средст0 ва, уменьшение износа от повышенного скольжения поверхностей колес и рельсов и общего расхода энергии сжатой рабочей среды.
Поставленная цель достигается тем, что
5 антиблокировочной системой осуществляют установленным темпом повышение давления рабочей среды в соответствующем тормозном цилиндре колесного тормоза до превышения допустимой величины сколь0 жеиия колеса, после чего это давление установленным темпом понижают до перехода контролируемого колеса к ускорению его вращения, а затем удерживают давление на достигнутом уровне до достижения сколь5 жением допустимой его величины, после чего осуществляют повышение давления ускоренным темпом до уровня, на установленную величину меньшего запоминаемого уровня давления, при котором предшесгву0 ющем антиблокировочном цикле скольжение превысило допустимую величину, и удерживают давление на таком уровне в течение времени прохождения транспортным Средством установленного отрезка тормоз5 него пути, после чего установленным темпом вновь осуществляют повышение давления до превышения допустимой величины скольжения контролируемого колеса и далее антиблокировочный цикл повторяют, однако для достижения указанной цели в
установленном режиме ведут торможение одного, задающего колеса или оси транспортного средства, а все другие колеса или оси тормозят индивидуально, аналогичным образом, при этом верхний уровень давления в их тормозных цилиндрах всегда ограничивают величиной, на установленное значение меньшей, для других подвижных единиц в транспортном средстве с учетом различной нагрузки, приходящейся на колесо или ось, и параметров тормозных систем, предшествующего ей верхнего уровня давления в тормозном цилиндре задающего колеса, Для повышения уровня сцепления и тормозной эффективности на участках с пониженным сцеплением вводится пропорциональная связь между уровнем запоминаемого давления, достигнутым задающим колесом или осью, и устанавливаемым отрезком тормозного пути для удержания давления. Кроме того, с целью уменьшения и выравнивания износа отдельных колес и повышения эффективности торможения, колеса или оси транспортного средства используют по очереди в качестве задающих. При этом о начале движения транспортного средства выявляют колесо или ось, находящиеся в наихудших условиях по скольжению, и используют его в качестве задающего колеса или оси, Во время торможения транспортного средства, после прохождения или установленной величины отрезка пути, выявляют колесо или ось, из бывших ранее задающими, имевшее на предыдущем отрезке пути наибольшее скольжение, и используют его в качестве задающего колеса или оси. По указанному способу в качестве задающих используют колеса или оси, которые за время прохождения установленной величины отрезка тормозного пути накопили суммарное скольжение меньше критического.
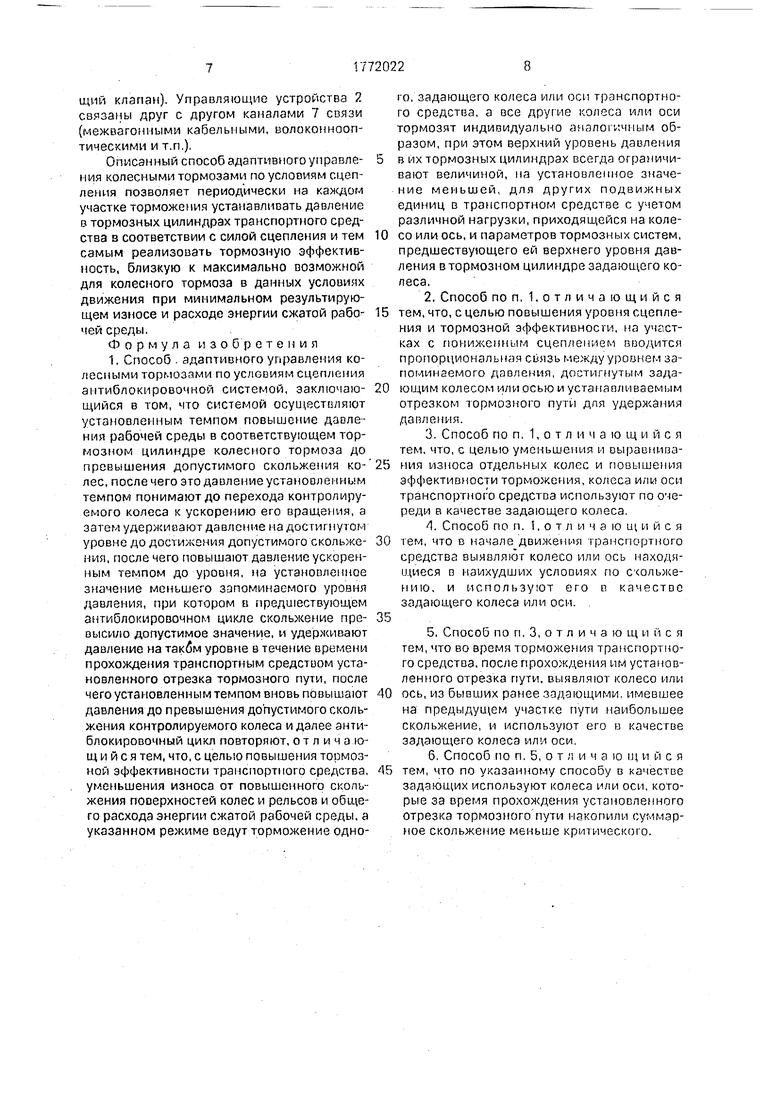
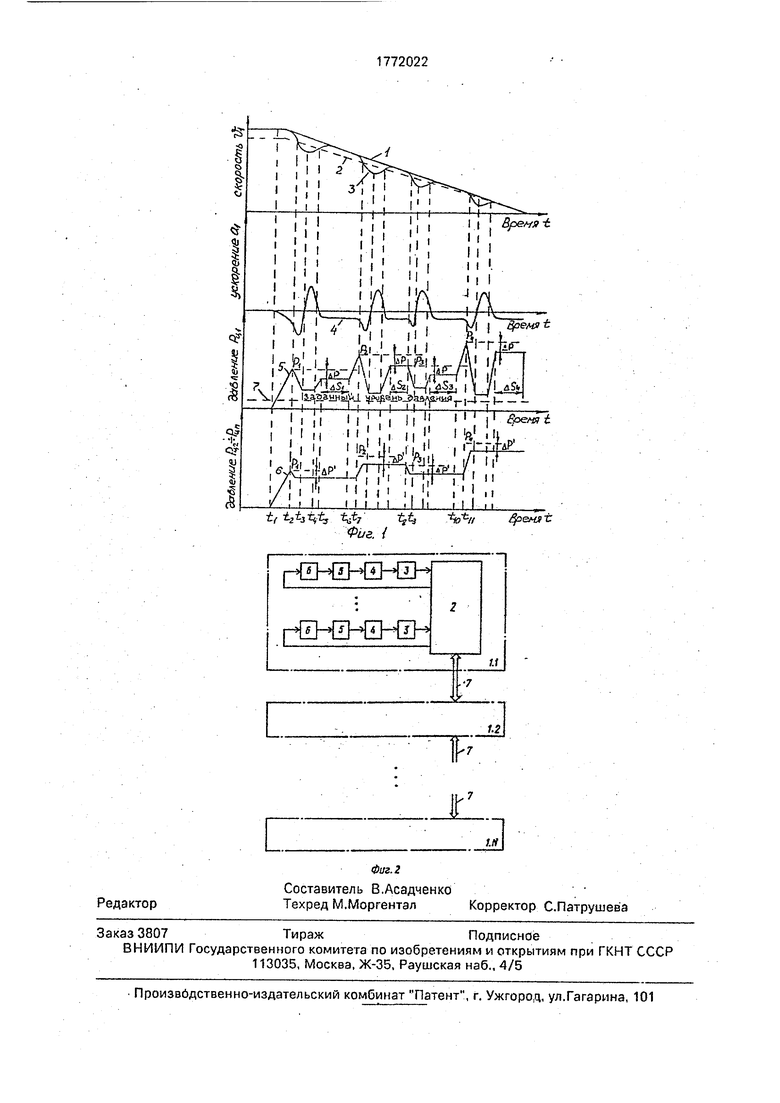
Для пояснения процессов, протекающих при торможении транспортного средства по предлагаемому способу, где на фиг. 1 показаны идеализированные для упрощения следующие временные зависимости.
Кривой 1 отображено изменение во времени линейной скорости транспортного средства при торможении; кривой 2 определяются граничные значения допустимого скольжения колеса; кривой 3 - изменение окружной скорости задающего колеса при возникновении и ликвидации его повышенного скольжения; 4 - изменение ускорения задающего колеса; кривой 5 - изменение давления рабочей среды в тормозном цилиндре для задающего, например, 1-го колеса; 6 -- изменение давления рабочей среды в тормозных цилиндрах для других
колес; линией 7 - заданный уровень давления при пониженном сцеплении.
Последовательность операций, позволяющая реализовать заявляемый способ.
заключается в следующем. В начале торможения (ti-tz) определенным темпом повышают давление рабочей среды во всех тормозных цилиндрах от 1-го до n-го. В момент времени t2, когда скольжение одного,
например, 1-го колеса становится выше допустимого, повышение давления прекрэща- юти начинают его понижатьустановленным темпом, для 1-го колеса до тех пор, пока оно не перейдет к ускорению вращения, а для
остальных - до величины, на установленное значение АР меньшей допустимого перед переходом в юз задающего колеса. После антиблокировочного цикла и выдержки времени прохождения определенного участка
тормозного пути с давлением, меньшим на установленную величину запоминаемого, давление в тормозном цилиндре для 1-го колеса вновь повышают до возникновения его избыточного скольжения и осуществляют очередной антиблокировочный цикл для задающего колеса. В момент времени t устанавливают в других тормозных цилинд pax давление меньше достигнутого для задающего колеса на установленную
величину А Р .
Если избыточное скольжение задающего колеса возникает раньше, чем закончится установленный отрезок пути Д S. то давление в тормозном цилиндре задающего колеса изменяют по антиблокировочиому циклу, а давление в остальных тормозных цилиндрах уменьшают на установленную величину (ts-tg). При возможном входе в юз незадаю- щего колеса индивидуально выполняется
указанный антиблокировочный цикл, а тормозной цилиндр, при его завершении, наполняется до величины, на установленное значение Л Р меньшей достигнутой перед выполнением ближайшего антиблокировочного цикла для задающего колеса.
Изобретение иллюстрируется нижеприведенным примером. Обобщенная функциональная схема устройства, реализующего заявляемый способ, изображена на фиг. 2,
На каждом из вагонов 1.1...1.N, входящих в поезд, установлено управляющее устройство 2, представляющее собой, например, микроконтроллер или микроЭВМ, обрабатывающее информацию, которая поступает с датчиков 3 скорости и вращения колесных
пар 4. Необходимую величину давления в тормозных цилиндрах 5 и темпы его изменения обеспечивает регулирующий орган 6 (например, трехпозиционный сбрасывающий клапан). Управляющие устройства 2 связаны друг с другом каналами 7 связи (межвагонпыми кабельными, волоконнооп- тическими и т.п.),
Описанный способ адаптивного управления колесными тормозами по условиям сцепления позволяет периодически на каждом участке торможения устанавливать давление в тормозных цилиндрах транспортного средства s соответствии с силой сцепления и тем самым реализовать тормозную эффективность, близкую к максимально возможной для колесного тормоза в данных условиях движения при минимальном результирующем износе и расходе энергии сжатой рабочей среды.
Формула изобретения 1. Способ . адаптивного управления колесными тормозами по условиям сцепления антиблокировочной системой, заключающийся в том, что системой осуществляют установленным темпом повышение давления рабочей среды в соответствующем тормозном цилиндре колесного тормоза до превышения допустимого скольжения ко- лес,после чего это давление установленным темпом понимают до перехода контролируемого колеса к ускорению его вращения, а затем удерживают давление на достигнутом уровне до достижения допустимого скольжения, после чего повышают давление ускоренным темпом до уровня, на установленное значение меньшего запоминаемого уровня давления, при котором EI предшествующем антиблокировочном цикле скольжение превысило допустимое значение, и удерживают давление на такбм уровне в течение времени прохождения транспортным средством установленного отрезка тормозного пути, после чего установленным темпом вновь повышают давления до превышения допустимого скольжения контролируемого колеса и далее антиблокировочный цикл повторяют, отличающийся тем, что, с целью повышения тоомоз- ной эффективности транспортного средства, уменьшения износа от повышенного скольжения поверхностей колес и рельсов и общего расхода энергии сжатой рабочей среды, а указанном режиме ведут торможение одного, задающего колеса или оси транспортного средства, а все другие колеса или оси тормозят индивидуально аналогичным образом, при этом верхний уровень давления
в их тормозных цилиндрах всегда ограничивают величиной, на установленное значение меньшей, для других подвижных единиц в транспортном средстве с учетом различной нагрузки, приходящейся на колесо или ось, и параметров тормозных систем, предшествующего ей верхнего уровня давления в тормозном цилиндре задающего колеса,
2.Способ поп, 1.отличающийся тем, что, с целью повышения уровня сцепления и тормозной эффективности, на учгст- ках с пониженным сцеплением вводится пропорциональная связь между уровнем запоминаемого давления, достигнутым задающим колесом или осью и устанавливаемым отрезком тормозного пути для удержания давления.
3.Способ по п. 1, о т л и ч а ю щ и и с я тем. что, с целью уменьшения и оыравниваиия износа отдельных колес и повышения эффективности торможения, колеса или оси транспортного средства используют по очереди в качестве задающего колеса.
4.Способ по п. 1, о т л и ч а ю щ и и с я 1ем, что в начале движения транспортного
средства выявляют колесо или ось находящиеся в наихудших условиях по с ольже- нию, и используют его в качестве задающего колеса или оси.
5.Способ по п. 3, о т л и ч а ю щ и и с я тем, что во время торможения транспортного средства, после прохождения им установленного отрезка пути, выявляют колесо или
ось, из бывших ранее задающими, имевшее на предыдущем участке пути наибольшее скольжение, и используют его в качестве задающего колеса или оси.
6.Способ по п. 5, о т л и ч а ю щ и и с л 5 тем, что по указанному способу в качестве
задающих используют колеса или оси, которые за время прохождения установленного отрезка тормозного пути накопили суммарное скольжение меньше критическою.
Ъ-ЬЪ-фз ЪЬ ЪЪ Фиг. {
ttot,l фемя г
п
Использование: относится к способам автоматического адаптивного управления колесными тормозами посредством изменения давления рабочей среды в тормозных цилиндрах в зависимости от силы сцепления и может быть использован в тормозных цилиндрах в зависимости от силы сцепления и может быть использован в тормозных системах транспортных средств, преимущественно на железнодорожном транспорте. Сущность изобретения: способ включает операции: повышение давления в тормозном цилиндре до превышения допустимого скольжения, понижение давления до перехода колеса к ускорению своего вращения; удержание давления постоянным до достижения скольжением допустимой величины; повышение давления до уровня на установленную величину меньшего, чем максимальный уровень давления в предыдущем цикле, удержание давления на таком уровне на протяжении отрезка пути, новое повышение давления до превышения допустимого скольжения и т.д. Новым в способе является то, что в таком режиме ведут торможение одной задающей оси в вагоне или поезде, а все другие оси тормозят аналогично, но верхний уровень давления в их тормозных цилиндрах ограничивают величиной, меньшей, чем максимальная величина давления в предыдущем цикле для задающей оси, вводится пропорциональная связь между максимальным давлением для задающей оси и длиной отрезка пути, на котором давление удерживается постоянным, осли максимальное давление менее заданного, то длину этого отрезка пути принимают равной нулю и все остальные оси тормозят индивидуально в таком же режиме, Функцию задающей оси последовательно передают другим осям, причем сначала той, которая первой превышает допустимое скольжение, затем - оси, имеющей на предыдущем отрезке пути наибольшее суммарное скольжение, а если суммарное скольжение больше критического, такую ось из процесса дальнейшего торможения по данному способу исключают. 5 з.п. ф-лы 2 ил. сл с XI VI го о N) К)
IF 11
33
| Способ автоматического управления колесными тормозами | 1981 |
|
SU1009843A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
