Изобретение относится к области автоматического регулирования, в частности, к системам автоматического регулирования по отклонению с отрицательной обратной связью и может быть использовано в любой отрасли, использующей автоматические регуляторы для целей регулирования параметров состояний объектов управления.
Известны устройства для адаптации регулятора, включающие систему автоматического регулирования выходных параметров объекта, математическую модель объекта автоматического регулирования, блок расчета настроек регулятора (например, ПИД-регулятора) и блок корректировки настроек регулятора [1-6].
При этом в блоке коррекции настроек регулятора применяются известные методы, основанные на использовании моделей объекта автоматического регулирования и их динамических параметров, например, инженерный метод Копеловича-Круга, метод амплитудно-частных характеристик Ротача и др. [2, 6].
Однако недостатком этих устройств является использование для адаптации регулятора линейных моделей объектов автоматического регулирования и дискретный характер внесения коррекции настроек регулятора, что приводит к необходимости в случае нелинейного характера поведения объекта к частым дискретным внесениям возмущений на вход объекта и снижению качества автоматического регулирования.
Таким образом, известно устройство для адаптации регулятора (корректировки его настроек в зависимости от изменяющихся во времени динамических характеристик объекта автоматического регулирования) [1], являющееся наиболее близким аналогом предлагаемого устройства и выбранное в качестве прототипа. Известное устройство содержит регулятор с изменяемыми настройками (например, ПИД-регулятор с настройками: коэффициент пропорциональности, время интегрирования и время дифференцирования), блок идентификации динамических характеристик объекта автоматического регулирования, блок математической модели, блок коррекции настроек регулятора и блок генерации активных воздействий на вход объекта автоматического регулирования.
Недостатком этого устройства является то, что для проведения процедуры адаптации используются линейные модели объекта и то, что в процессе идентификации динамических характеристик объекта на входе объекта в дискретном режиме наносятся активные возмущающие воздействия, приводящие к динамическим отклонениям регулируемых параметров объекта от заданных значений, что, в свою очередь, приводит к возникновению дополнительных динамических погрешностей и нарушениям технологических процессов. Этот недостаток особенно проявляет себя в условиях все более ужесточающихся требованях к качеству процессов регулирования. Например, при нагреве под термообработку ответственного оборудования (из стали ШХ-15, титановых сплавов и т.д.) требуется уже точность регулирования ±5°С и менее. Имеется целый ряд процессов, в которых по требованиям точности регулирования внесение дополнительных возмущающих воздействий исключается по технологическим инструкциям.
Кроме того, при реализации этого способа для проведения идентификации параметров объекта требуется формировать специальные возмущающие воздействия, например, в виде единичного скачка, бинарного шума и т.д., а сам процесс идентификации, основанный на стохастическом методе «черного ящика», протекает дискретно во времени, что приводит к задержке в коррекции настроек регулятора и дополнительным погрешностям в процессе регулирования, особенно ощутимым для сравнительно инерционных объектов регулирования.
В случае использования, так называемых, пассивных методов идентификации объектов (без нанесения активных воздействий) при сравнении параметров модели и объекта, находящегося под управлением, требуется очень большое время для получения значимой информации для идентификации модели, так как требуемые для идентификации отклонения входных и выходных величин имеют в этом случае стохастический характер и вообще могут не проявиться, так как объект, как отмечалось, находится в процессе регулирования. Общеизвестны многие неудачные примеры пассивной идентификации. Таким образом, известно устройство по реализации способа адаптации регулятора с использованием линейных моделей объектов и дискретной активной идентификации параметров объектов регулирования [1].
Задача настоящего изобретения состоит в улучшении качества автоматического регулирования, уменьшении динамических погрешностей процесса регулирования за счет обеспечения непрерывности и быстродействия процесса адаптации регулятора без нанесения дополнительных активных возмущающих воздействий на вход объекта автоматического регулирования. Указанная задача решается тем, что предложено устройство детерминированной адаптации регулятора, включающее последовательно соединенные: объект автоматического регулирования, датчик, блок оценивания выходных параметров объекта, элемент сравнения выходных параметров объекта и заданных значений выходных параметров объекта, регулятор, элемент сравнения выходной величины регулятора и возмущающего воздействия, при этом выход элемента сравнения выходной величины регулятора и возмущающего воздействия соединен со входом объекта автоматического регулирования, а также включающее блок линейной модели объекта, блок расчета настроек и блок коррекции настроек регулятора, причем выход блока линейной модели объекта подключен к входу блока расчета настроек регулятора, выход которого соединен со входом блока коррекции настроек регулятора, а выход блока коррекции настроек регулятора подключен к входу регулятора, отличающееся тем, что оно дополнительно снабжено блоком нелинейной модели объекта, блоком сравнения параметров линейной и нелинейной моделей объекта, блоком расчета нелинейной коррекции параметров линейной модели объекта, при этом выходы блоков нелинейной и линейной моделей объекта подключены к входам блока сравнения параметров линейной и нелинейной моделей объекта, выход которого подключен к входу блока расчета нелинейной коррекции параметров линейной модели объекта, а выход блока оценивания выходных параметров объекта соединен с входом блока расчета нелинейной коррекции линейной модели объекта, выход которого подключен к входу блока линейной модели объекта.
На чертеже изображена блок-схема предлагаемого устройства.
Устройство включает:
1 - объект автоматического регулирования;
2 - регулятор;
3 - датчик;
4 - блок оценивания выходных параметров объекта;
5 - элемент сравнения выходной величины объекта с заданием на поддержание выходного параметра;
6 - элемент сравнения выходной величины регулятора с возмущающим воздействием;
7 - блок линейной модели объекта;
8 - блок нелинейной модели объекта;
9 - блок сравнения параметров линейной и нелинейной моделей;
10 - блок расчета нелинейной коррекции параметров линейной модели;
11 - блок расчета настроек регулятора;
12 - блок коррекции настроек регулятора;
13 - устройство отображения результатов расчета настроек регулятора.
При этом:
хвх.о. и хвых.о. - входная и выходная величины объекта;
Хзд - заданное значение выходной величины объекта;
хвх.р. и хвых.р. - входная и выходная величины регулятора;
yв - возмущающее воздействие.
Устройство работает следующим образом. Датчики выходных параметров 3 в совокупности с блоком оценивания 4, регулятор 2, элементы сравнения 5 и 6 осуществляют регулирование выходной величины объекта по отклонению с отрицательной обратной связью (с компенсацией возмущения ув за счет выходной величины регулятора хвых.р.).
Блок линейной модели 7 содержит формально линейную модель объекта с соответствующими параметрами модели. В блоке сложной нелинейной модели 8 формируется нелинейная модель объекта 1. С использованием моделей блока 7 и 8 в блоке 9 проводится их сравнение и выявляются необходимые детерминированные поправки к параметрам линейной модели в виде нелинейностей, используемых в линейной модели блока 7. Реализация этой поправки проводится блоком нелинейной коррекции 10, в которую поступает сигнал от датчиков 3 и блока оценивания 4 выходной величины объекта хвых.о. В блоке оценивания 4 проводится требуемая для процесса регулирования корректировка выходных величин объекта хвых.о и их отфильтровывание от шумов и других случайных помех.
Поправки, непрерывно учитывающие изменения динамических свойств и параметров объекта и определяющие его нелинейность, зависящую от изменения выходных параметров объекта, таким образом, непрерывно вносится в блок 11. С использованием корректируемых значений динамических характеристик объекта в блоке 11 проводится определение настроек регулятора и результаты этого определения используются с помощью блока 12 для корректировки настроек регулятора 2. В блоке 13 проводится визуализация проведенных изменений параметров модели объекта и корректируемых настроек регулятора.
При реализации коррекции настроек регуляторов используются линейные или линеаризованные модели объектов [2, 6-8]. В предлагаемом устройстве используются линейные модели (блок 7), содержащие все формальные признаки и параметры линейной модели, но предназначенные для корректировки этих параметров с учетом особо значимых нелинейностей, определяемых реальными динамическими свойствами объектов и связанных вследствие этого с выходными его параметрами. Но для выявления этих нелинейностей используются, кроме того, более сложные нелинейные модели объектов (блок 8) и с их помощью выявляются элементы нелинейностей. Эти нелинейности, выявляемые через выходные параметры объектов и связанные с ними, вносятся в линейные модели через корректировку их параметров и используются, в свою очередь, для корректировки настроек регуляторов. При этом в отличие от известных способов адаптации регуляторов не требуется дискретно вносить активные возмущающие воздействия на вход объектов, а процесс корректировки параметров объекта и соответственно настроек регулятора происходит непрерывно во времени.
Наиболее типичным способом представления линейной модели объектов регулирования и управления при реализации адаптивных регуляторов является инерционное звено первого порядка. При реализации звеньев более высокого порядка используется правило перемножения передаточных функций таких звеньев при их последовательном включении. Эти же звенья используются и при других способах их включения (параллельные, с обратными связями), а также и при линеаризации нелинейностей. В ряде случаев используется звено запаздывания.
При построении дифференциального уравнения линейного инерционного звена в общем случае для самых различных объектов используется обобщенный термодинамический метод [7] и линейное дифференциальное уравнение представляется в виде
где хвых и хвх - выходная и входная величины объектов соответственно Т и К - постоянная времени и коэффициент передачи (усиления) объекта.
Величина Т, в свою очередь, равна

где R - обобщенное сопротивление, С - обобщенная емкость объекта. Например, в случае теплового объекта

где m - масса объекта, Суд - удельная теплоемкость материала; α - коэффициент теплопередачи; F - поверхность нагрева.
В случае регулирования уровня жидкости
где μ - коэффициент источника; ω - площадь проходного сечения истекающего отверстия; Fб - площадь поверхности бака.
При этом коэффициент передачи
Данное инерционное звено, таким образом, использует линейную модель (1), при этом важнейшие коэффициенты этого уравнения Т и К принимаются постоянными, что собственно и является главным признаком линейности модели.
Однако использование более сложных нелинейных моделей реальных объектов позволяет выявить наиболее значимые нелинейности в математическом описании этих объектов и внести корректировки параметров в модель (1). При этом оказывается, что эти нелинейности напрямую связаны с выходными величинами объекта.
Так для высокотемпературного теплового объекта при использовании для описания процессов теплообмена закона четвертой степени температур (закона Стефана - Больцмана) вместо закона первых степеней температур (закона Ньютона) величина коэффициента теплоотдачи [9,10]
где σвид - видимый коэффициент теплоотдачи излучением; θп и θм - температуры печи и металла соответственно.
В этом случае постоянная времени объекта равна
и уравнение (1) можно записать в виде уже фактически нелинейного уравнения

В случае регулирования уровня жидкости при использовании уравнения Бернулли для нелинейной модели объекта [10] постоянная времени объекта равна
и коэффициент передачи
где Н - уровень жидкости.
С использованием соотношений (9) и (10) уравнение (1) превращается также в нелинейное

Из уравнения (7), (9), (10) следует, что коэффициенты (параметры) нелинейной модели объекта напрямую связаны с выходными величинами объекта (в рассматриваемых случаях это температуры печи и металла, уровень жидкости) и их корректировку можно осуществлять путем измерения соответствующих величин.
В случае теплового объекта величина постоянной времени
В случае регулирования уровня жидкости

Используя обобщенный термодинамический метод построения математических моделей объектов управления и регулирования [7], можно находить для любых процессов параметры как линейных, так и нелинейных моделей и определять зависимость параметров нелинейных моделей от выходных параметров объектов, внося соответствующую коррекцию в значения коэффициентов модели по мере изменения выходных параметров объекта. Это позволяет использовать корректируемые непрерывно во времени с учетом изменения выходных параметров объектов коэффициенты настройки регуляторов. Так по методике Копеловича настройки ПИД-регулятора определяются для апериодического процесса регулирования по формулам [6]

где Кр, Ти и Тд - настройки регулятора - коэффициент пропорциональности, время интегрирования и время дифференцирования соответственно; τзап - время запаздывания.
Как следует из уравнения (14), основным параметром, определяющим настройки регулятора является постоянная времени объекта, и в случае ее корректировки настройки соответственно изменяются.
В случае, если модель объекта состоит из нескольких включенных линейных звеньев с их использованием строится кривая разгона (кривая переходного процесса), по ней известными методами определяется время запаздывания и постоянная времени объекта [4, 8], а корректировка постоянной времени осуществляется описанным выше методом с использованием нелинейной модели и данных о выходных параметрах объекта.
ПРИМЕРЫ КОНКРЕТНОГО ВЫПОЛНЕНИЯ УСТРОЙСТВА И РАСЧЕТА
Пример 1. Регулирование температуры в термической печи для термообработки титановых сплавов
Этот пример является весьма типичным для многих весьма ответственных технологических процессов, в которых осуществляется нагрев и плавление самых различных материалов, при этом требования к равномерности и точности нагрева к настоящему времени часто достигают уже метрологически предельных значений (±5°С).
Первоначально найденные с использованием линейной модели (1) и соотношений (3) значения времени запаздывания и постоянной времени объекта - печи для термообработки титановых сплавов τзап=10 с, Т=150 с при коэффициенте теплоотдачи α=300 Вт/(м2·К) (блок 7, фиг.1).
Нелинейная модель (блок 8), как отмечалось ранее, включает основную нелинейность объекта в виде зависимости коэффициента теплоотдачи от температуры печи и температуры металла (уравнение (6)). В устройстве температура печи измеряется термопарой, температура металла - радиационным пирометром (блок 3).
Первоначальные значения (с использованием параметров линейной модели) настроек ПИД-регулятора при выборе апериодического процесса регулирования в блоке 11 определятся по соотношениям (14):
 ; Ти=2,4·150=360 с; Тд=0,4·150=60 с.
; Ти=2,4·150=360 с; Тд=0,4·150=60 с.
В процессе нагрева при термообработке титановых сплавов температура печи изменяется от  =1600°С=1873 К до
=1600°С=1873 К до  =1800°С=2073 К; температура металла от
=1800°С=2073 К; температура металла от  =20°С=292 К до
=20°С=292 К до  =850°С=1123 К. В процессе работы детерминированного адаптивного регулятора непрерывно во времени в процессе нагрева заготовок с использованием показаний датчиков температуры печи и металла вносятся изменения в динамические характеристики объекта (в данном случае в значение постоянной времени Т) и соответственно корректируются настройки ПИД-регулятора.
=850°С=1123 К. В процессе работы детерминированного адаптивного регулятора непрерывно во времени в процессе нагрева заготовок с использованием показаний датчиков температуры печи и металла вносятся изменения в динамические характеристики объекта (в данном случае в значение постоянной времени Т) и соответственно корректируются настройки ПИД-регулятора.
В блоке 10 происходят конкретные вычисления требуемых поправок на нелинейность объекта, а в блоке 11 - определение настроек регулятора (см. фиг.1).
В качестве примера ниже приведены эти расчеты для начала и конца процесса нагрева.
По формуле (6) при определенном значении σвид=3,2·10-8 Вт/(м2·К4) (определяемом по известным соотношениям [9]):
для начала нагрева

для конца нагрева

В блоке 10 по рассчитанным значениям αнел с использованием в данном случае формулы (12) определяются скорректированные значения постоянной времени, в частности:
для начала нагрева

для конца нагрева
Эти скорректированные данные через блок модели 7 поступают в блок 11, в котором рассчитываются скорректированные значения настроек ПИД-регулятора, в частности:
для начала нагрева

для конца нагрева

Определенные таким образом настройки из блока 11 поступают в блок 12 для непрерывной во времени (по мере нагрева в печи) корректировки настроек регулятора 2.
Как видим, по ходу нагрева значения динамических параметров объекта изменяются в 2,3 раза, соответственно изменяются и настройки регулятора. Неучет этих изменений приводит к значительным динамическим погрешностям в процессе регулирования.
В блоке нелинейной модели 8 выявляется и другая существенная для процесса нагрева нелинейность линейной модели (1) - зависимость удельной теплоемкости нагреваемого материала Суд от температуры материала θм (см. соотношения (3)). Большинство материалов характеризуются ростом удельной теплоемкости с температурой. Например, для цветных сплавов достаточно типичной является температурная зависимость типа [11]

где С0 - теплоемкость сплава при 0°С; αt - температурный коэффициент теплоемкости, θ - температура °С.
Отметим, что для титана в диапазоне нагрева от 0 до 850°С удельная теплоемкость изменяется всего лишь на 12%. Однако для ряда материалов - стали, чугун - диапазон этого изменения может составлять до 1,5-2 раз. В этом случае, как следует из формул (2) и (3), соответствующим образом значительно изменяется и нелинейная постоянная времени объекта и согласно формулам (14), настройки регулятора. Таким образом, диапазон требуемых изменений настроек регулятора в процессе нагрева различных материалов может доходить до 3-5 раз и более.
Непрерывная по ходу нагрева корректировка настроек регулятора без дискретного нанесения каких-либо возмущений в объект управления позволяет обеспечить процесс регулирования с минимальными динамическими отклонениями и при отсутствии искусственно вносимых возмущений на вход объекта. В случае рассматриваемого примера требуемая точность нагрева ±5°С и нанесение каких-либо дополнительных возмущений исключается по технологической инструкции, а следовательно, использование известных методов адаптации регулятора в этом случае становится неприемлемым.
Пример 2. Регулирование уровня жидкости
Этот пример является также весьма типичным для многих технологических процессов, особенно в металлургии, химии, деревообработке и т.д. При этом требования к точности регулирования непрерывно возрастают. Так в металлургии при регулировании уровня в кристаллизаторе установки непрерывной разливки металла диапазон регулирования уровня составляет не более 50 мм, при этом отклонения от требуемых значений приводят к самым серьезным аварийным ситуациям. Внесение каких-либо возмущающих воздействий для идентификации модели объекта и адаптации регулятора при этом исключаются.
Первоначально найденные с использованием линейной модели (1) и соотношений (4) и (5) значения для регулирования уровня жидкости в диффузионном химическом аппарате значения времени запаздывания и постоянной времени объекта - емкости с жидкостью составили τзап=15 с, Т=200 с. Коэффициент передачи объекта К=1,2 м/(м3/с) (блок 7, фиг.1).
Нелинейная модель (блок 8) включает основную нелинейность объекта в виде зависимостей (9) и (10).
В данном объекте уровень жидкости измеряется с помощью емкостного уровнемера.
Первоначальные значения настроек ПИД-регулятора (с использованием параметров линейной модели) при выборе апериодического закона регулирования определятся по соотношениям (14)

В процессе регулирования уровня в данном технологическом процессе изменение уровня происходит в пределах от 2 м до 0,8 м.
В процессе изменения уровня в данном диапазоне непрерывно с использованием показаний датчика уровня вносятся изменения в динамические характеристики объекта (постоянная времени, коэффициент передачи) и соответствующие корректировки настроек регулятора.
В качестве примера приведем расчет динамических характеристик объекта регулирования и настроек ПИД-регулятора для крайних случаев изменения диапазона уровня.
По формулам (13):
для значения Н=0,8 м

для значения Н=2 м

Таким образом, в процессе регулирования динамические характеристики данного объекта изменяются почти в 1,6 раза.
Эти скорректированные данные через блок модели 7 поступают в блок 11, в котором определяются скорректированные значения настроек ПИД-регулятора, в частности:
при Н=0,8 м

при Н=2,0 м

Как видим, в процессе регулирования уровня коэффициент пропорциональности регулятора в данном случае не изменяется. Однако время интегрирования и время дифференцирования данного объекта изменяются в соответствии с изменением постоянной времени объекта также почти в 1,6 раза. Адаптация настроек регулятора позволяет обеспечить непрерывное поддержание требуемого качества регулирования.
Отметим, что вторым источником нелинейности модели данного объекта является возможная зависимость коэффициента истечения жидкости μ от режима истечения (скорости истечения, температуры жидкости и т.д.).
Например, зависимость коэффициента истечения от температуры особенно существенна для вязких жидкостей, например нефтепродуктов. В этом случае требуется использование датчика температуры жидкости и внесения поправок в динамические характеристики объекта с использованием зависимости

где θж - температура жидкости.
Корректировка динамических характеристик объекта и настроек регулятора проводится аналогичным образом.
Таким образом, предлагаемое устройство детерминированной адаптации регулятора позволяет без внесения дополнительных возмущений в объект проводить в непрерывном во времени режиме (в темпе с процессом) коррекцию настроек регуляторов и тем самым увеличить как динамическую, так и статическую точность процессов автоматического регулирования.
ЛИТЕРАТУРА
1. Рей У. Методы управления технологическими процессами. М.: Мир, 1983, -368 с.
2. Ротач В.Я., Кузишин В.Ф., Клюев А.С.и др. Автоматизация настройки систем управления /Под ред. В.Я.Ротача. Чесноков Ю.Н., Гусев О.А. - М.: Энергоатомиздат, 1984.
3. Методы классической и современной теории автоматического управления. Учебник для вузов. В 3-х томах. М: Изд-во МГГУ, 2000.
4. Сметана А.З. Автоматическая и автоматизированная настройка регуляторов теплоэнергетических процессов. Теплоэнергетика, 2004, №11, с.47-52.
5. Куликов Г.Г., Флеминг П.Дж., Брейкин Т.В., Арьков В.Ю. Марковские модели сложных динамических систем. Идентификация, моделирование и контроль состояния на примере цифровой САУ ГТД. Уфа: УГ АТУ, 1998. - 103 с.
6. Чесноков Ю.Н., Гусев О.А. Проектирование систем регулирования на ПК /Под ред. В.В.Муханова. Екатеринбург: УГТУ, 1999. - 108 с.
7. Автоматизированное управление технологическими процессами. Учебное пособие /Н.С.Зотов, О.В.Назаров, Б.В.Петелин, В.Б.Яковлев /Под ред. В.Б.Яковлева. Л.: Изд-во ЛГУ, 1988. - 224 с.
8. Проектирование систем контроля и автоматического регулирования металлургических процессов. Учебное пособие /Под ред Г.М.Глинкова. М.: Металлургия, 1986. - 352 с.
9. Невский А.С.Лучистый теплообмен в печах и топках. М.: Металлургия, 1971. - 439 с.
10. Кривандин В.А., Арутюнов В.А., Белоусов В.В. и др. Теплотехника металлургического производства. T.1. Учебное пособие для вузов. М.: МИСиС, 2002. - 608 с.
11. Советкин В.Л., Федяева Л.А. Теплофизические свойства веществ. Свердловск: УПИ, 1990. - 104 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ расширения диапазона регулирования АСР без потери устойчивости | 2016 |
|
RU2619746C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2001 |
|
RU2211470C2 |
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА УСТОЙЧИВОЙ РАБОТЫ АСР | 2008 |
|
RU2388037C1 |
| СПОСОБ ОПТИМАЛЬНОЙ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2003 |
|
RU2243584C2 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2000 |
|
RU2166788C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| СПОСОБ И УСТРОЙСТВО НАСТРОЙКИ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ (САРД) В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ ДЛЯ ПЕРЕКАЧИВАНИЯ НЕФТЕПРОДУКТОВ | 2014 |
|
RU2578297C1 |
Изобретение относится к области автоматического регулирования. Техническим результатом является улучшение качества автоматического регулирования за счет уменьшения динамических погрешностей процесса регулирования. Устройство включает систему автоматического регулирования параметров объекта с отрицательной обратной связью, а также блок линейной модели объекта, блок расчета настроек регулятора и блок коррекции настроек регулятора, отличающееся тем, что оно дополнительно снабжено блоком нелинейной модели объекта, блоком сравнения параметров линейной и нелинейной моделей объекта, при этом выходы блоков нелинейной и линейной моделей объекта подключены к входам блока сравнения параметров линейной и нелинейной модели объекта, выход которого подключен к входу блока расчета нелинейной коррекции параметров линейной модели объекта, а выход блока оценивания выходных параметров объекта соединен с входом блока расчета нелинейной коррекции линейной модели объекта. 1 ил.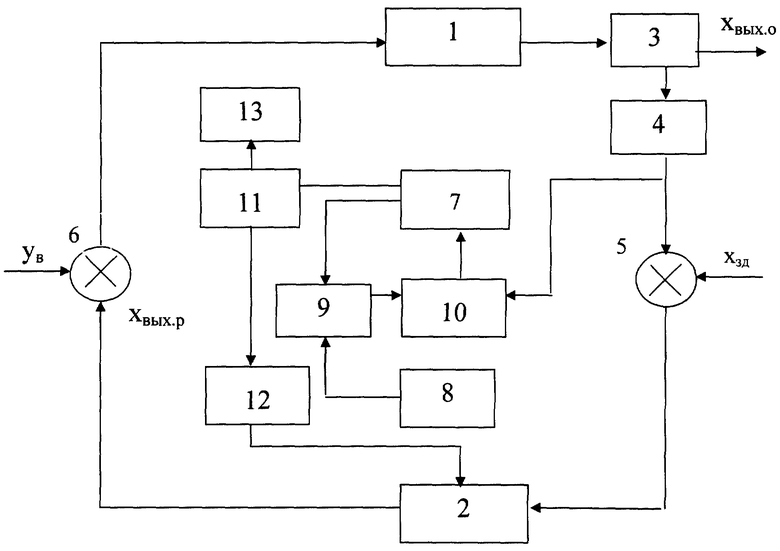
Устройство адаптации регулятора, включающее последовательно соединенные объект автоматического регулирования, датчик, блок оценивания выходных параметров объекта, элемент сравнения выходных параметров объекта и заданных значений выходных параметров объекта, регулятор, элемент сравнения выходной величины регулятора и возмущающего воздействия, при этом выход элемента сравнения выходной величины регулятора и возмущающего воздействия соединен со входом объекта автоматического регулирования, а также включающее блок линейной модели объекта, блок расчета настроек и блок коррекции настроек регулятора, причем выход блока линейной модели объекта подключен к входу блока расчета настроек регулятора, выход которого соединен с входом блока коррекции настроек регулятора, а выход блока коррекции настроек регулятора подключен ко входу регулятора, отличающееся тем, что оно дополнительно снабжено блоком нелинейной модели объекта, блоком сравнения параметров линейной и нелинейной моделей объекта, блоком расчета нелинейной коррекции параметров линейной модели объекта, при этом выходы блоков нелинейной и линейной моделей объекта подключены к входам блока сравнения параметров линейной и нелинейной моделей объекта, выход которого подключен к входу блока расчета нелинейной коррекции параметров линейной модели объекта, а выход блока оценивания выходных параметров объекта соединен с входом блока расчета нелинейной коррекции линейной модели объекта, выход которого подключен к входу блока линейной модели объекта.
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Адантивное устройство для идентификации объекта управления | 1987 |
|
SU1478190A1 |
| RU 93029406 A, 10.03.1997 | |||
| WO 9732270 A, 04.09.1997. | |||

