Изобретение относится к автоматике и может быть использовано в системах автоматического управления объектами с переменными параметрами.
Удовлетворительная работа известного устройства обеспечивается при постоянных значениях дисперсий помехи и параметров объекта управления, при этом оптимальное значение опт находится по формуле
т р 5,-(D +D 4-K+D.V1«Ј),
где (5 - коэффициент, зависящий от постоянной времени изменения параметров объекта и постоянной времени алгоритма адаптации;
D - приведенная дисперсия помехи;
D. - приведенная дисперсия параметров
Фактически значения этих величин непостоянны и, следовательно, настроечный коэффициент Л опт в известном устройстве всегда отличается от оптимального значения, что приводит к уменьшению точности определения параметров объекта управления0
Цель изобретения - повышение точности устройства.
Применяя две модели с различными ft, можно получить информацию о направлении оптимальной поднастрой- ки коэффициентов и повысить динамическую точность определе шя параметров объекта управления, используя эту информацию для поднастройки А .
На фиг о 1 и 2 изображены схемы адаптивного устройства для : дентифиЈь
СЮ
со
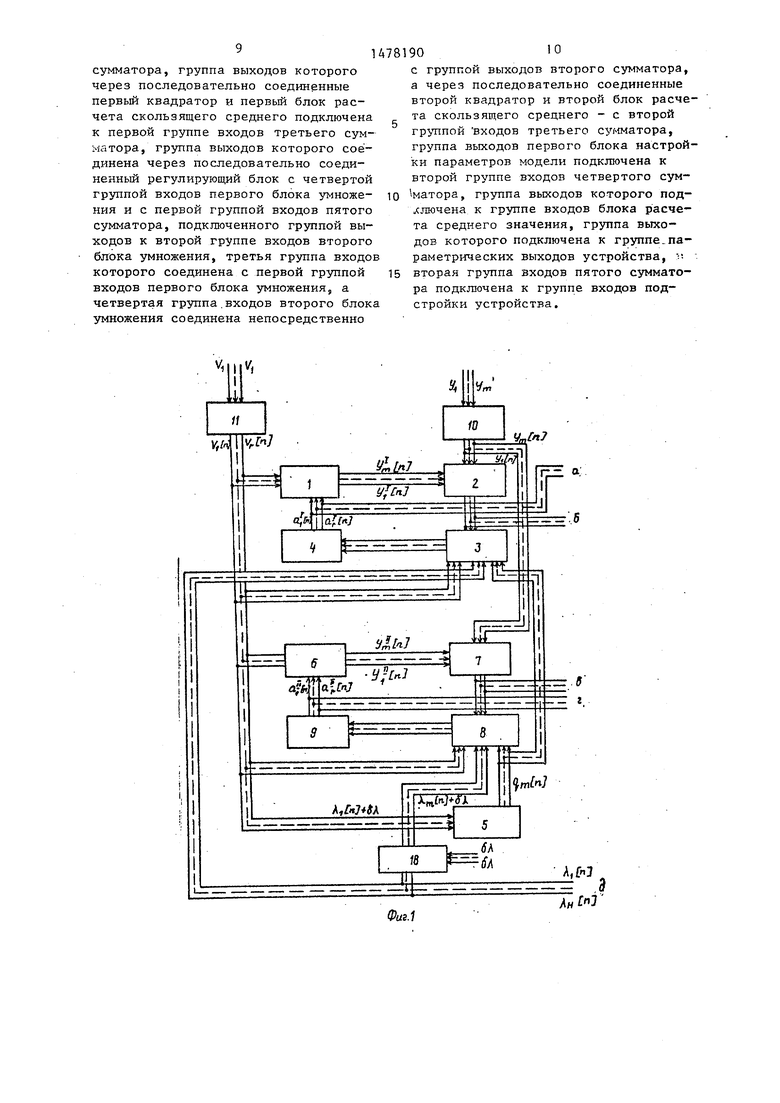
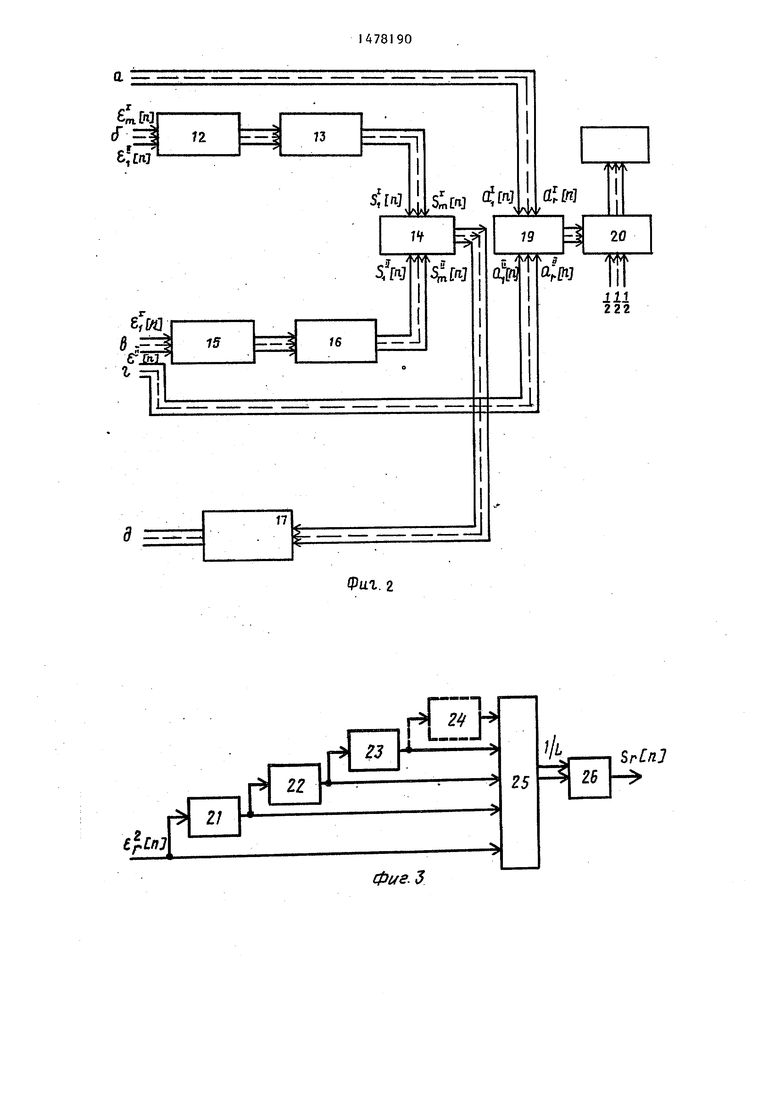
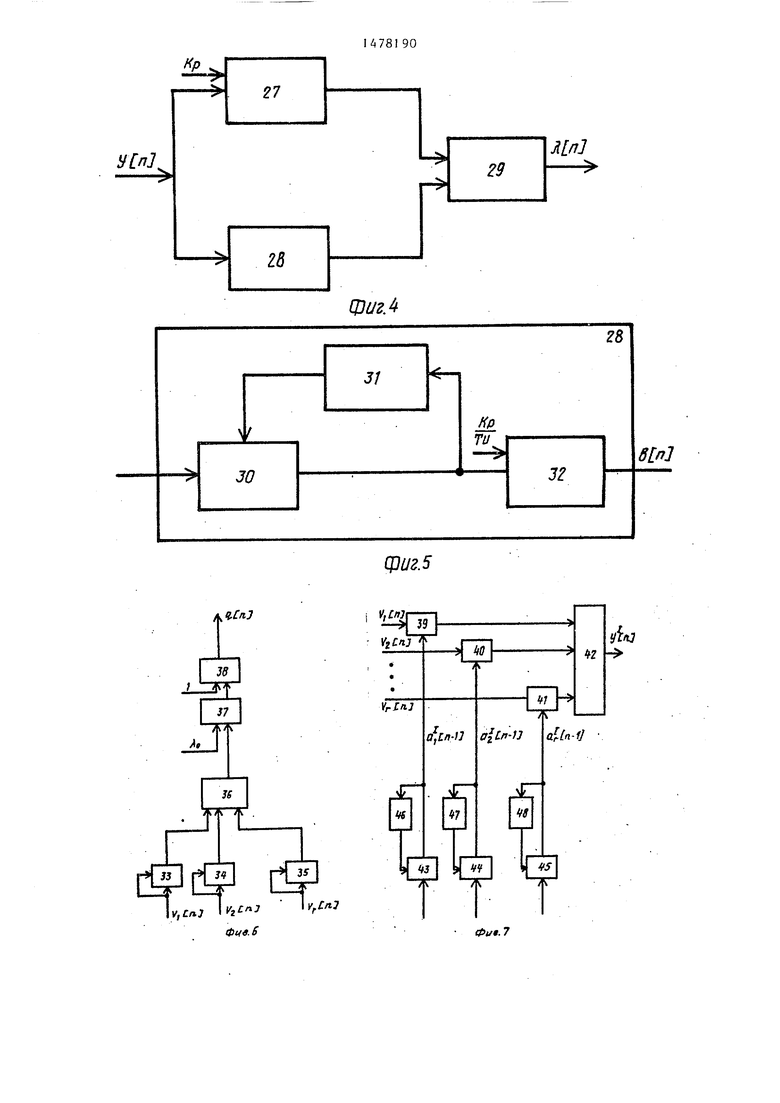
кации объекта управления (нестационарный объект с числом входных воздействий, равным г, и с m измеряемыми выходными величинами); на фиг 3 структурная схема блока расчета скользящего среднего; на фиг0 4 - структурная схема регулирующего блока; на фиг 5 - структурная схема интегрирующего блока; на фиг„ 6 - структурная схема блока набора масштабных коэффициентов; на фиг„ 7 структурная схема моделей объекта управления с блоком настройки параметров модели объекта управления; на фиг о 8 - результаты численного моделирования предлагаемого и известного устройств; на фиг 9 - структурная схема примера реализации блоков умножения для общего случая
Устройство содержит первую модель 1 объекта управления, первый сумматор 2, первый блок 3 умножения первый блок 4 настройки параметров модели, блок 5 набора масштабных коэффициентов, вторую модель 6 объекта управления, второй сумматор 7, второй блок 8 умножения, второй блок 9 настройки параметров модели, первый 10 и второй 11 блоки аналого-цифровых преобразователей, первый квадратор 12, первый блок 13 расчета скользящего среднего, -тий сумматор 14, второй квадр Ф 15, второй блок 16 расчета сч- льзящего среднего, регулирующий блок 17, пятый 18 и четвертый 19 сумматоры, второй блок 20 расчета среднего значения
Блок расчета скользящего среднего содержит (фиг„ 3) элементы 21 - 24 задержки, суммирующий блок 25 и блок 26 умножения
Регулирующий блок содержит блок 27 умножения (фиг. 4), на который подается настроечный сигнал К., интегратор 28 и сумматор 29„
Интегратор 28 (фиг„ 5) содержит сумматор 30, блок.31 задержки, блок 32 умножения, на вход которого
К.Р подается настроечный сигнал --«
Блок 5 набора масштабных коэффициентов (фиг 6) содержит блоки 33 - 35 умножения, блок 36 суммирования, сумматор 37, на который поступает сигнал Ъа , и блок 38 вычисления обратной величины Модель
0
5
0
5
0
5
0
5
0
5
объекта управления с блоком настройки параметров модели (фиг 7) содержит блоки 39-41 умножения, суммирующий блок 42, суммирующие элементы 43 - 45, элементы 46 - 48 задержки
Блоки умножения (фиг„ 9) содержит (mxr) умножителей 49
Структурные схемы описанных блоков приведены для одномерного объекта (например, для т 1, )0
Устройство работает следующим образом
Измеренные входные воздействия V,, V , .,., Vn (по отношению к объекту управления) в аналоговом виде подаются на входы второго блока 11 аналого-цифровых преобразователей Измеренные выходные сигналы объекта управления Y,, , Y,...,Yrn подаются на входы первого блока 10 аналого-цифровых преобразователей Второй 11 и первый 10 блоки аналого- цифровых преобразователей осуществляют дискретное преобразование аналоговых входных и выходных сигналов (по отношению к объекту управления), в результате чего на их выходах получаются последовательности цифровых сигналов (в двоичном коде) V, СП1
V4W. и М 41ХЬ..., в дискретные моменты времени п. С выходов второго блока 11 аналого-цифрового преобразователя последовательность сигналов V, п,
поступает на входы
первой 1 и второй 6 моделей объекта управления, на входы первого 3 и второго 8 блоков умножения и на блок 5 набора масштабных коэффициентов.
Формирование оценок параметров объекта управления с помощью первой модели 1 объекта управления (в первом канале идентификации) осуществляется следующим образом
Выходные сигналы Y ЈХЗ i Cn .., первой модели 1 объекта управления подаются на первые входы первого сумматора 2, на вторые входы которого подается последовательность сигналов Y, n , ,. 0. с выходов первого блока 10 аналого-цифровых преобразователей Первый сумматор 2 вычисляет рассогласование выходных координат объекта управления и первой модели 1 объекта управления Ј М Ј« М, . о., б™ И и подает их на входы первого блока 3 умножения, на (другие) входы которого подаются сигналы q( tfj, . „ „, q h с выходов блока 5 набора масштабных коэффициентов, на входы первого блока умножения подается последовательность сигналов V СП3 УО Vj, Сп с выходов второго блока 11 аналого-цифровых преобразователей На входы первого блока умножения подается последовательность сигналов -Д, Сп , г Lnl m И с выходов регулирующего блока 170
Параметры первой модели 1 объек- та управления на каждом шаге идентификации корректируются сигналом, пропорциональным произведению величин, входящих в первый блок 3 умножения
Аналогично работает второй канал идентификациио Выходные сигналы
7tl
Y
4 LliJ А X 5 v u У fvi
дели 6 объекта управления подаются на входы второго сумматора 7, на входы которого подается последовательность сигналов Y, Јn , Y2 n, .. „ с выходов первого блока 10 анлого-цифровых преобразователей Второй сумматор 7 вычисляет рассогласование выходных координат объекта и второй модели 6 объекта управления
, ,. , и п°дает их
на входы второго блока 8 умножения, на входы которого подают сигналы Ч, М ° 4mM c выходов блока 5 нбора масштабных коэффициентов. На входы второго блока 8 умножения подаются сигналы с выхода пятого сумматора 18 А, Сп + А Сп + + $Ч An, , где.&ъ -второе слагаемое в пятом сумматоре, определяющее отличие второго канала от первого и позволяющее создать приращение настраиваемого параметра fl Сп с целью формирования оценки производной ошибки рассогласования по настраиваемому параметру
Сигналы с выхода первого сумматора 26 И, ,..., , являю щиеся ошибками рассогласования параметров объекта управления и первой модели объекта 1 управления, подаются на входы первого квадратора 12 на выходе которого появляются сигналы, представляющие собой квадраты ошибок рассогласования 6 . Эти сигналы подаются на первый блок 13 расчета
И, Y Cn,.,1 rfj второй мо
10
14781906
скользящего среднего, работающего по алгоритму
5 0
рпг
«
где i 1,2,..o,m, на выходе этого блока появляются сигналы, являющиеся оценками скользящих дисперсий ошибок рассогласования на интервале L ,«.e, Эти сигналы подаются на входы сумматора 14
Сигналы с выхода сумматора 7
Ј М Е И m M являющиеся ошибками рассогласования параметров объекта управления и второй модели 6 объекта управления, подаются на входы второго квадратора 15, на выходе которого появляются сигналы, представляющие собой квадраты ошибок рассогласования ii ,
5
тп П1 ти сигналы подаются на второй блок 16 расчета скользящего среднего, работающего по алгоритму
- -г-1 12 г л
Ј j Сп
где i 1,2,...,m;
L - интервал усреднения, . на выходе этого блока появляются оценки скользящих дисперсий на интервале L S1,1 ВД, SЈ1V,...,SЈ nf. Эти сигналы подаются на входы третьего сумматора 14, на выходе которого формируются сигналы
Y.IXJ зГи - s Y,H 4Г И - s
0 00
№ - sj,nj.
Эти сигналы подаются на вход регулирующего блока 17, работающего, например, по ПИ-закону:
Ъ И Ь;Гп + Kp;Y;Cn,
где i 1,2,...,m
Ъ. TU настроечные коэффициенты регулятора о
Регулятор работает таким образом, чтобы свести к нулю оценку производной ошибки рассогласования.
Выходные сигналы регулирующего блока А; Сп , г Сп ДмМ подаются на входы первого блока 3 умножен
ния и на входы пятого сумматора 18, на входы которого также подается сигнал 8ft . Тем самым осуществляется поднастройка коэффициентов i, tnl,
и Ъ , tri + И , ъг fri +
+ о А ,... , таким образом, чтобы -6YW, где ,2,...,т.
Оптимальное значение Л опт находится между V, (XI и Ъ; ri + Sfl. С вы- ходов первого блока 4 настройки параметров модели объекта на входы четвертого сумматора 19 поступают
сигналы а. Гп , , Ы,
представляющие собой оценки парамет л ров объекта управления в первом канале На входы четвертого сумматора 19 с выходов второго блока 9 настройки параметров модели объекта управления поступают сигналы ГП3 а i ..°farl д являющиеся оценками параметров объекта управления во втором канале Выходные сигналы
четвертого сумматора 19 а,; п) +
+ «ft М, aV. .
а1. Јrf + if подаются на вход блока 20, что позволяет усреднить оценки параметров объекта управления по каждому входу, на выходе блока 20 появляются сигналы
«Ч;
представляющие собой оценки параметров объекта управления„ Эти оценки могут использоваться для поднастрой- ки модели объекта, которая может быть использована непосредственно в системе управления действующими
объектами.
I
Устройство может найти широкое применение в системах управления технологическими процессами в качестве идентификаторао Применение предлагаемого устройства позволяет оператив- но получать достоверную информацию об объекте управления и ведет к повышению качества регулирования
Формула изобретения
Адаптивное устройство для идентификации объекта управления, содержащее первый блок аналого-цифровых
5
5 0
5
0
35
40
45
JQ
55
преобразователей, группа входов которого является группой входов устройства для подключения соответственно к группе выходов объекта управления, второй блок аналого-цифровых преобразователей, группа входов которого является группой входов устройства для подключения соответственно группы входов объекта управления, группа выходов второго блока аналого-цифровых преобразователей подключена к группе информационных входов первой модели объекта управления и к группе входов блока набора масштабных коэффициентов, подключенного группой выходов к первой группе входов первого блока умножения, группа выходов которого соединена с группой входов первого блока настройки параметров модели, подключенного группой выходов к группе входов настройки параметров первой модели объекта управления, группа выходов которой подключена к первой группе входов первого сумматора, подключенного группой выходов к второй группе входов первого блока умножения, вторая группа входов первого сумматора подключена к группе выходов первого блока аналого-цифровых преобразователей, о тличающееся тем, что, с целью повышения точности устройства, в него введены вторая модель объекта управления, второй - пятый сумматоры, второй блок умножения, второй блок настройки параметров модели, первый и второй квадраторы, первый и второй блоки расчета скользящего среднего, регулирующий блок, блок расчета среднего значения, причем группа информационных входов первой модели объекта управления подключена к группе информационных входов второй модели объекта управления, к третьей группе входов первого блока умножения и к первой группе входов второго блока умножения, подключенного группой выходов к группе входов второго блока настройки параметров модели, группа выходов которого соединена с первой группой входов четвертого сумматора и с группой входов настройки параметров второй модели объекта управления, группа выходов которой подключена к первой группе входов второго сумматора, вторая группа входов которого соединена с второй группой входов первого
yU
сумматора, группа выходов которого через последовательно соединенные первьй квадратор и первый блок расчета скользящего среднего подключена к первой группе входов третьего сум- .чатора, группа выходов которого соединена через последовательно соединенный регулирующий блок с четвертой группой входов первого блока умноже- ния и с первой группой входов пятого сумматора, подключенного группой выходов к второй группе входов второго блока умножения, третья группа входов которого соединена с первой группой входов первого блока умножения, а четвертая группа входов второго блока умножения соединена непосредственно
90Ю
с группой выходов второго сумматора, а через последовательно соединенные второй квадратор и второй блок расчета скользящего среднего - с второй группой входов третьего сумматора, группа выходов первого блока настройки параметров модели подключена к второй группе входов четвертого сум- Ыатора, группа выходов которого подключена к группе входов блока расчета среднего значения, группа выходов которого подключена к группе,параметрических выходов устройства, вторая группа входов пятого сумматора подключена к группе входов подстройки устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| Самонастраивающаяся по входному сигналу система управления | 1987 |
|
SU1529176A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Анализатор частотных характеристик | 1985 |
|
SU1307373A1 |
| Адаптивное устройство для идентификацииОб'ЕКТА упРАВлЕНия | 1978 |
|
SU798701A1 |
| Устройство для определения коэффициентов разложения корреляционной функции по системе ортонормированных базисных функций | 1980 |
|
SU900295A1 |
| Самонастраивающаяся система управления диаметром и влажностью жил на бумагомассных машинах | 1986 |
|
SU1462275A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
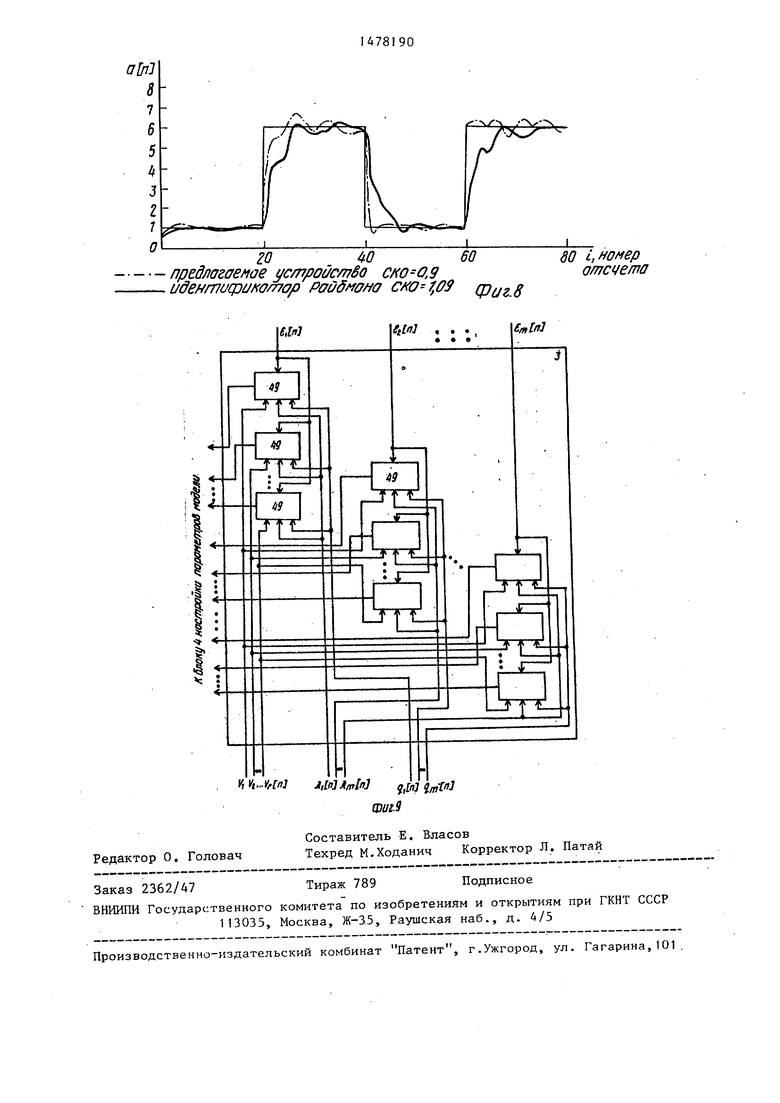
Изобретение относится к автоматике и может быть использовано в системах автоматического управления объектами с переменными параметрами. Изобретение позволяет повысить точность устройства. Устройство содержит две модели объекта управления, пять сумматоров, два блока умножения, два блока настройки параметров модели, блок набора масштабных коэффициентов, два квадратора, два блока расчета скользящего среднего, два блока аналого-цифровых преобразователей. Путем применения двух моделей в устройстве получается информация о направлении оптимальной настройки, что позволяет повысить точность определения оценок параметров объекта управления, ускорить процесс идентификации. 9 ил.
Л7
О
Фиг1
W
- О
Лн М
Фиг. 2
2/
п
22
п
J
гШ:
.А
Sr/:/z;
25
26
Фие.З
УМ.
J8
i Д ... 1 i
t
C§№
lv,r«7i
Гл7
Фч« S
ф.
.5
f/u
IT
Фив. 7
/N
I Ч
r
f040
предлагаемое ус/пройстёо ,д идентифико/лор Райдмано ско,09 фиг 8
.s
ууч ..
Pw.
80 i, но мер отсчета
| Устройство для определения параметров линейных динамических объектов | 1977 |
|
SU642681A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
