Изобретение относится к классу струйных акселерометров (СА), которые могут входить в состав комбинированных систем управления (КСУ) летательных аппаратов (ЛА), содержащих, наряду с электронными каналами управления, резервный канал неэлектрической природы, обеспечивающий сохранение на время сбоя и восстановления электронного канала или полного его отказа, вызванных действием естественных и организованных дестабилизирующих факторов, работоспособности и непрерывности управления вследствие инвариантности резервного канала к указанным воздействиям.
Разработано множество различных вариантов схем построения пневматических акселерометров с инерционными массами [1].
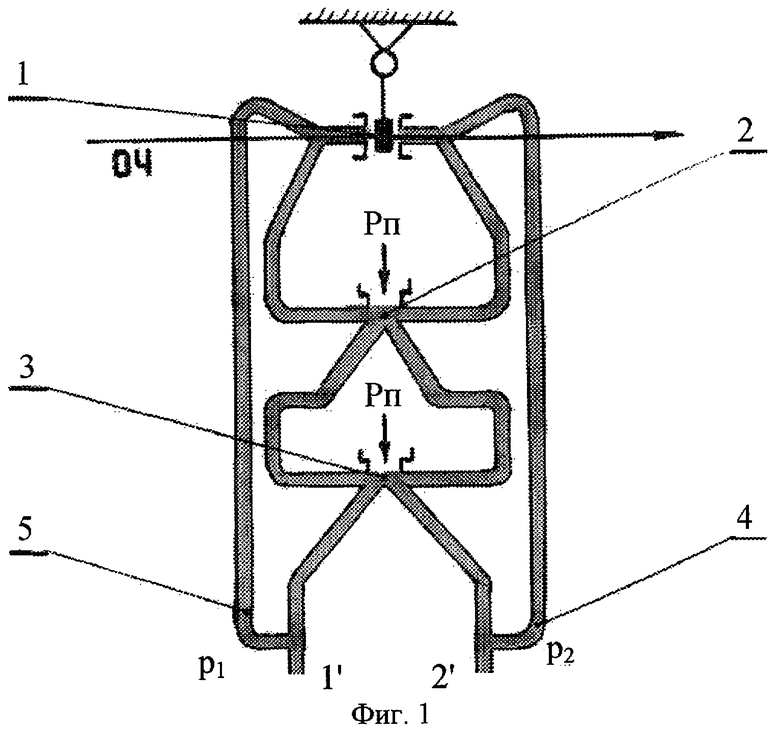
Наиболее предпочтительной с точки зрения обеспечения требуемого диапазона измерений и точностных характеристик является схема построения маятникового компенсационного газоструйного акселерометра с инерционной массой (см. фиг.1). Работа данного акселерометра состоит в следующем. При действии кажущегося ускорения вдоль положительного направления оси чувствительности акселерометра маятник (1) за счет силы инерции отклоняется от своего нулевого положения влево. При этом за счет усиления дроссельного эффекта (повышения сопротивления газовому потоку при приближении маятника к входному отверстию) в левом плече первого струйного усилителя дифференциального типа (2) создается повышенное давление, а за счет снижения дроссельного эффекта (понижения сопротивления потоку при удалении маятника от входного отверстия) в правом плече этого же усилителя давление понижается. Повышение и снижение давления в левом и правом плечах усилителя (2) соответственно приводит к тому, что питающий поток (с давлением Рп) усилителя (2) разделяется на две части, основная из которых направляется в правое плечо второго струйного усилителя дифференциального типа (3), а остальная меньшая - в его левое плечо. Повышение давление в правом плече усилителя (3) приводит к отклонению основной части питающего потока (с давлением Рп) этого усилителя к левому выходу акселерометра. При этом создаваемое повышенное давление p1 в канале обратной связи (5) формирует силу, противодействующую силе инерции, действующей на маятник (1). В правом выходе СА формируется пониженное давление р2. Разность давлений на выходах акселерометра (1', 2') δp=p1-p2 является аналоговым сигналом, пропорциональным действующему кажущемуся ускорению [2].
При такой схеме построения СА исключается влияние давления питания на маятниковость СА и существует возможность использования для подвеса инерционной массы технологий, применяемых в существующих высокоточных электромеханических акселерометрах.
Однако для широкого использования данных СА в составе КСУ ЛА, построенных на основе цифровых вычислителей (бортовой цифровой вычислительной машине (БЦВМ) и цифровом струйном вычислителе (ЦСВ)), требуется его усовершенствовать с целью получения цифрового выходного сигнала, что не реализовано в существующих СА данного типа [2].
Для этого предлагается ввести в его схему два преобразователя "давление-частота", построенных на основе струйных генераторов частоты.
Выходным сигналом такого цифрового СА является разность частот генераторов, пропорциональная действующему ускорению (фиг.2).
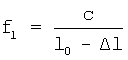
Преобразование аналогового сигнала δр в цифровую форму осуществляется следующим образом. Газовый поток с давлением p1, поступающий в сильфон (7), приводит к изменению (в рассматриваемом случае к увеличению) его линейного размера на величину Δl. Так как основание сильфона жестко связано с корпусом акселерометра, а подвижная часть - с кулисой (9) с помощью жесткого крепления (20), то происходит изменение (уменьшение) длины гибкого канала обратной связи (12) генератора частоты (11) на величину Δl, что приводит к увеличению частоты f1 на выходах (16, 18) этого генератора согласно формуле
 ,
,
где с - скорость звука в газе, l0 - начальная суммарная длина двух каналов обратной связи (12, 14) генератора частоты (10). Симметричный канал обратной связи (14) того же генератора имеет постоянную длину.
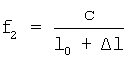
Аналогичные процессы происходят во втором выходном канале СА с той лишь разницей, что давление р2 ниже начального значения, линейный размер сильфона (6), жестко связанного с корпусом акселерометра и с кулисой (8) с помощью крепления (21), уменьшается, длина гибкого канала обратной связи (13) генератора частоты (10) увеличивается, соответственно частота на его выходах (17, 19) уменьшается и равняется
Второй канал обратной связи (15) этого генератора также имеет постоянную длину.
Для обеспечения требуемых динамических характеристик сильфона (скорости сжатия и растяжения) в его конструкцию введены подпружиненная пластина (22) и дроссельные отверстия (23).
При изменении направления действия кажущегося ускорения в противоположную сторону по отношению к рассмотренному случаю процессы в каналах СА имеют симметричную к рассмотренному процессу картину.
На основе разности полученных частот f1 и f2, поступающих на входы ЦСВ (1", 2"), в вычислителе формируется значение кажущейся скорости, действующей вдоль оси чувствительности СА.
Источники информации
1. Залманзон Л.А. Аэрогидродинамические методы измерения входящих параметров автоматизированных систем. - М.: Наука, 1973.
2. Bauer P. Uniaxial accelerometer controlled fluidic amplifier. Патент США №3543782 от 21.05.1965, опубликован 01.12.1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2420745C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И ПНЕВМАТИЧЕСКИЙ СКОРОСТЕМЕР ДЛЯ ТЕЛА | 2010 |
|
RU2421733C1 |
| СПОСОБ ПНЕВМАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ УСКОРЕНИЯ ДВИЖЕНИЯ ТЕЛА В СКОРОСТЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421734C1 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121693C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР, ИМЕЮЩИЙ ДВА ДИАПАЗОНА ИЗМЕРЕНИЯ | 2016 |
|
RU2697011C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| Емкостный датчик перемещений | 2020 |
|
RU2750131C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
Изобретение относится к классу струйных акселерометров, которые могут входить в состав комбинированной системы управления летательных аппаратов. Акселерометр содержит маятник с инерционной массой и два последовательно соединенных струйных усилителя дифференциального типа с двумя выходными каналами, при этом первый выходной канал второго усилителя соединен с первым сильфоном со стороны его неподвижной части, а его подвижная часть жестко соединена с подвижной частью первой кулисы, которая включена в разрыв гибкого канала обратной связи первого генератора частоты, его второй выход соединен с внешней средой, а первый выход того же генератора подключен к первому входу цифрового струйного вычислителя, второй выходной канал второго усилителя соединен с вторым сильфоном со стороны его неподвижной части, а его подвижная часть жестко соединена с подвижной частью второй кулисы, которая включена в разрыв гибкого канала обратной связи второго генератора частоты, при этом его второй выход соединен с внешней средой, а первый выход того же генератора подключен к второму входу цифрового струйного вычислителя, питание двух струйных усилителей и двух генераторов частоты осуществляется от единого источника газового питания. Техническим результатом является получение цифрового выходного сигнала. 2 ил.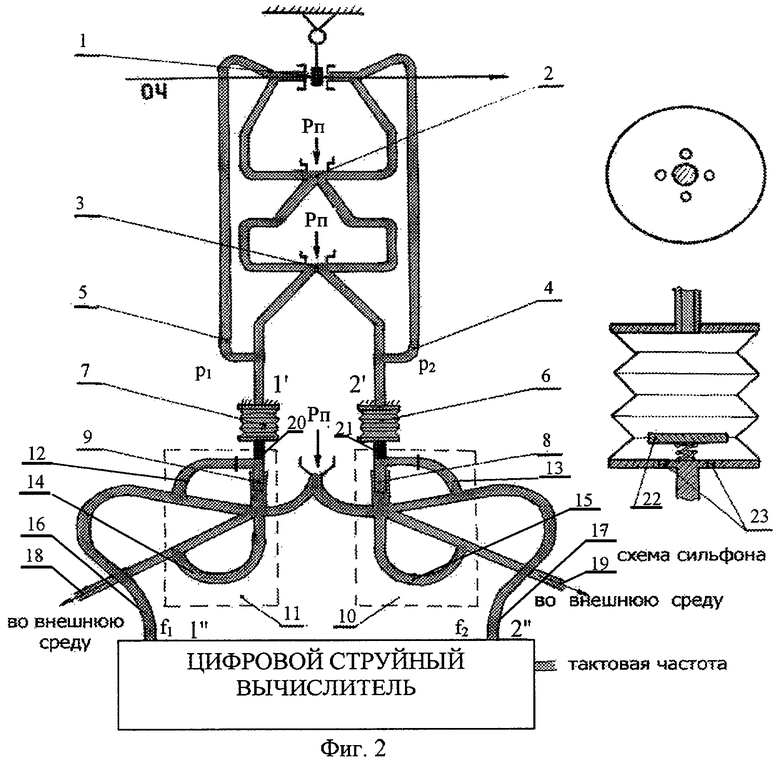
Струйный акселерометр, содержащий маятник с инерционной массой, два последовательно соединенных струйных усилителя дифференциального типа с двумя выходными каналами, отличающийся тем, что в него введены два преобразователя "давление-частота", выполненные в виде струйных генераторов частоты, первый выходной канал второго усилителя соединен с первым сильфоном со стороны его неподвижной части, а его подвижная часть жестко соединена с подвижной частью первой кулисы, которая включена в разрыв гибкого канала обратной связи первого генератора частоты, при этом его второй выход соединен с внешней средой, а первый выход того же генератора подключен к первому входу цифрового струйного вычислителя, второй выходной канал второго усилителя соединен со вторым сильфоном со стороны его неподвижной части, а его подвижная часть жестко соединена с подвижной частью второй кулисы, которая включена в разрыв гибкого канала обратной связи второго генератора частоты, при этом его второй выход соединен с внешней средой, а первый выход того же генератора подключен к второму входу цифрового струйного вычислителя, питание двух струйных усилителей и двух генераторов частоты осуществляется от единого источника газового питания.
| ЗАЛМАНЗОН Л.А | |||
| Аэродинамические методы измерения входящих параметров автоматизированных систем | |||
| - М.: Наука, 1973, с.307-309 | |||
| US 3543782 А, 01.12.1970 | |||
| Струйный датчик линейных ускорений | 1979 |
|
SU836594A1 |
| Струйный акселерометр | 1973 |
|
SU478251A1 |
| Струйный генератор частоты | 1972 |
|
SU467198A1 |
| US 4222271 А, 16.09.1980. | |||

