Изобретение относится к системам автоматического управления беспилотными летательными аппаратами (БЛА).
Наиболее близким к данному изобретению является способ [1], базирующийся на следующих положениях:
1. Система автоматического управления формирует сигналы управления продольным движением летательного аппарата (ЛА) на различных режимах.
2. Сформированные сигналы управления подаются на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления.
К недостаткам известного способа следует отнести тот факт, что наличие сильного ветрового возмущения в режиме посадки приводит к большим отклонениям ЛА от заданной высоты полета, что может привести к необходимости ухода на второй круг или к возникновению аварийной ситуации. Это связано с тем, что при известном способе управления происходит большое отклонение ЛА от заданной высоты полета, а классическое управление по сигналам обратных связей медленно возвращает ЛА на заданную высоту, и ЛА может не успеть вернуться на заданную траекторию посадки. Указанные недостатки не позволяют обеспечить требуемые характеристики процессов управления при наличии ветрового возмущения, особенно в режиме посадки.
Задачей изобретения является обеспечение требуемого качества процессов управления в системе автоматического управления продольным движением БЛА в режиме посадки и маршрутного полета при наличии сильного ветрового возмущения для повышения безопасности выполнения полетов.
Технический результат достигается тем, что сформированные сигналы управления продольным движением подают на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления, в канале руля высоты при формировании сигнала управления применяют сигнал оценки приращения угла атаки, вызванного ветровым возмущением, пропущенный через изодромное звено и умноженный на передаточный коэффициент, а также формируют дискретный оптимальный фильтр Калмана, далее сформированный сигнал управления поступает на вход привода руля высоты.
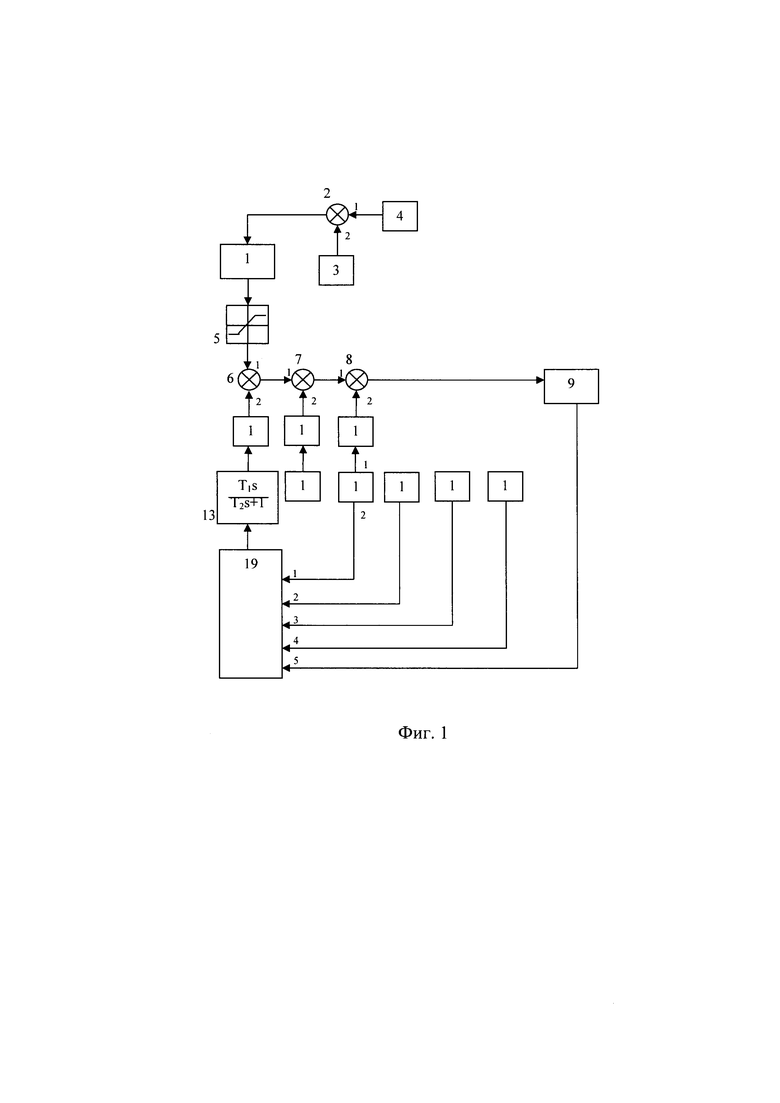
Сущность изобретения поясняется приведенным ниже описанием, фигурой 1, на которой представлена блок-схема системы, реализующей заявляемый способ управления боковым движением БЛА.
Система содержит первый усилитель 1, первый сумматор 2, блок задающих сигналов 3, датчик 4 измерения высоты полета БЛА (барометрической и радиовысоты), ограничитель 5, второй сумматор 6, третий сумматор 7, четвертый сумматор 8, привод руля высоты 9, второй усилитель 10, третий усилитель 11, четвертый усилитель 12, изодромный фильтр 13, датчик 14 угла наклона траектории, датчик 15 угловой скорости тангажа, датчик 16 вертикальной скорости, датчик 17 угла атаки, датчик 18 угла тангажа, дискретный оптимальный фильтр Калмана (ОФК) 19.
В режиме посадки или маршрутного полета для формирования сигнала управления рулем высоты из блока задающих сигналов 3 на второй инвертирующий вход первого сумматора 2 подается сигнал заданной высоты полета, при этом на первый вход первого сумматора 2 поступает сигнал с датчика 4 высоты полета, разность этих сигналов, через первый усилитель 1 поступает на ограничитель 5, сигнал с выхода которого поступает на первый вход второго сумматора 6, на второй вход которого поступает сигнал приращения угла атаки, вызванного ветровым возмущением, сформированный в ОФК 19 и пропущенный через изодромный фильтр 13 и второй усилитель 10, выходной сигнал второго сумматора 6 поступает на первый вход третьего сумматора 7, второй вход которого через третий усилитель 11 соединен с выходом датчика 14 угла наклона траектории, выходной сигнал третьего сумматора 7 поступает на первый вход четвертого сумматора 8, второй вход которого через четвертый усилитель 12 соединен с первым выходом датчика 15 угловой скорости тангажа, второй выход которого соединен с первым входом ОФК 19, сигнал с выхода четвертого сумматора 8 поступает на вход привода руля высоты 9, выходной сигнал которого поступает на пятый вход ОФК 19, второй вход которого соединен с выходом датчика 16 вертикальной скорости, третий вход соединен с выходом датчика 17 угла атаки, а четвертый вход соединен с выходом датчика 18 угла тангажа. Таким образом, наличие в стандартном законе управления рулем высоты сигнала оценки приращения угла атаки, вызванного воздействием вертикальной составляющей скорости ветра, пропущенного через изодромное звено и передаточный коэффициент, позволяет минимизировать отклонение БЛА по высоте, как при выполнении посадки, так и при маршрутном полете, когда на БЛА накладываются требования точного выдерживания заданной высоты полета.
Как показали результаты моделирования, указанный способ позволяет достичь заданных характеристик качества процессов управления и обеспечить безопасное выполнение посадки при наличии сильного ветрового возмущения до 15 м/с.
Для реализации заявляемого способа автоматического управления продольным движением БЛА не требуется специального оборудования. В системе могут быть использованы стандартные датчики высоты, вертикальной скорости, угловых скоростей и углов, выпускаемые промышленностью. Функции вычислителей могут быть реализованы с помощью бортовой цифровой вычислительной машины.
Источники информации
1. Патент RU 2588173 С1, 2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2006 |
|
RU2330792C1 |
| Система автоматического управления по крену и курсу беспилотного летательного аппарата при посадке | 2022 |
|
RU2784883C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЁТОМ | 2011 |
|
RU2482022C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ НА ПОСАДКЕ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2581215C1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
Изобретение относится к способу автоматического управления продольным движением БЛА при наличии ветрового возмущения. Для этого формируют сигнал управления, при формировании которого применяют сигнал оценки приращения угла атаки, вызванного ветровым возмущением, пропущенный через изодромное звено и умноженный на передаточный коэффициент, а также формируют дискретный оптимальный фильтр Калмана. Далее сформированный сигнал управления поступает на вход привода руля высоты. Обеспечивается повышение безопасности полетов при наличии ветрового возмущения. 1 ил.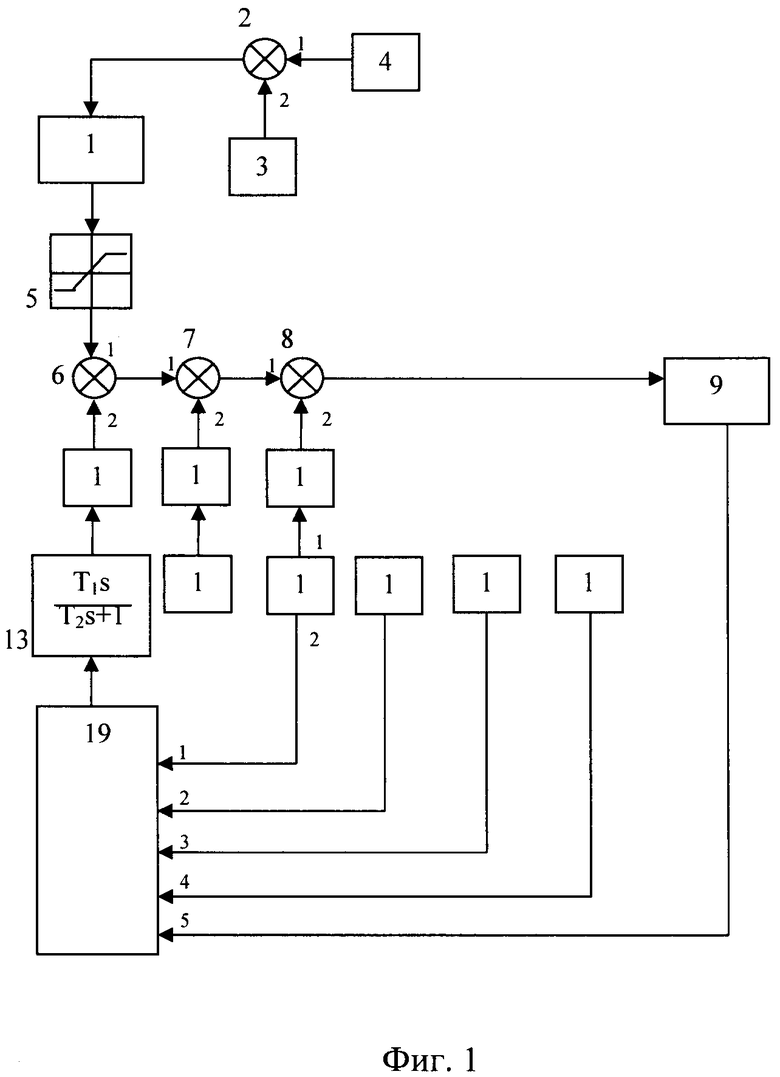
Способ автоматического управления продольным движением БЛА при наличии ветрового возмущения, заключающийся в том, что сформированные сигналы управления продольным движением подают на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления, отличающийся тем, что в канале руля высоты при формировании сигнала управления применяют сигнал оценки приращения угла атаки, вызванного ветровым возмущением, пропущенный через изодромное звено и умноженный на передаточный коэффициент, а также формируют дискретный оптимальный фильтр Калмана, далее сформированный сигнал управления поступает на вход привода руля высоты.
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ, САМОЛЕТ И СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2012 |
|
RU2561168C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| СПОСОБ ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2007 |
|
RU2344460C1 |
| CN 102520726 B, 03.07.2013 | |||
| CN 103391880 A, 13.11.2013. | |||

