Изобретение относится к области машиностроения, строительному производству и другим отраслям и может быть использовано для установки изделий в заданное пространственное положение в принятой системе координат, в частности, при выполнении сборочных и монтажных работ в самолетостроении.
При выполнении сборочных и монтажных работ отдельные элементы сборочной единицы необходимо установить в пространстве в заданное положение и зафиксировать их на период выполнения операции соединения.
Известно позиционирующее устройство, используемое для установки изделий стапеля при выполнении монтажа сборочной оснастки в самолетостроении (Григорьев В.П. Монтаж сборочных приспособлений с применением оптико-механических и электронных приборов. - М.: Изд. МАИ, 1977, с.8-9), которое осуществляет направленную установку изделия в пространстве с помощью нескольких подъемных механизмов винтового типа, связанных с изделием, а контроль перемещения заданных базовых точек изделия выполняется с помощью системы координатных измерений. Различные варианты конструктивных исполнений механизмов такого типа имеют общие недостатки:
- винтовые подъемные механизмы с изделием образуют жесткую структуру. Направленное перемещение одного из подъемных механизмов вдоль некоторого координатного направления возможно только при освобождении связей по остальным направлениям, что реализуется путем установки подъемных винтовых механизмов с возможностью «проскальзывания» в точках сопряжения с изделием за счет преодоления сил трения в пределах заданных зазоров в точках закрепления изделия в монтажном пространстве. Такая конструкция не позволяет точно регламентировать направление смещения изделия, а диапазоны смещений ограничиваются заданными зазорами в точках закрепления изделия в монтажном пространстве. Кроме того, наличие трения в точках «проскальзывания» приводит к дополнительной затрате энергии на преодоление трения, что значительно ограничивает технологические возможности монтажа, особенно при установке массивных изделий;
- винтовые подъемные механизмы не допускают независимого и раздельного управления положением каждой базовой точки изделия при предварительной установке изделия в монтажное положение, что приводит к необходимости предварительной установки изделия с большими отклонениями от заданного положения и снижает производительность установки за счет увеличения времени на выполнение итерационных процедур одновременного перемещения всех базовых точек изделия в заданное положение;
- наличие сил трения в точках «проскальзывания» винтового подъемного механизма может привести к возникновению внутренних напряжений не только в элементах позиционирующего устройства, но и в элементах изделия, что после закрепления изделия в монтажном пространстве и освобождения от позиционирующего устройства может привести к упругим деформациям элементов изделия, снижающим точность его пространственной установки.
Известно также позиционирующее устройство, принятое за прототип (патент РФ № 2226168 по кл. В 64 F 5/00, G 01 В 11/00, 11/02, 21/00 «Способ установки изделия в заданное пространственное положение и устройство для его осуществления»), включающее не менее трех модулей координатных перемещений, каждый модуль имеет три блока для перемещений соответственно по трем координатным направлениям, на каждом модуле расположен внешний носитель базовых точек, выполненный с возможностью перемещения раздельно и независимо от других внешних носителей базовых точек для того, чтобы расположение внешних носителей базовых точек в пространстве в принятой системе координат соответствовало расчетному положению носителей базовых точек устанавливаемого изделия, геометрический профиль каждого носителя внешних базовых точек выполнен геометрически ответным носителю базовых точек изделия. Таким образом, позиционирование изделия в пространстве выполняется путем совмещения поверхностей носителей базовых точек изделия и носителей внешних базовых точек позиционирующего устройства.
Это позиционирующее устройство имеет недостатки, связанные с тем, что после совмещения носителей базовых точек изделия и внешних носителей базовых точек позиционирующего устройства возможно неполное прилегание их геометрически ответных поверхностей, ведущее к недопустимой погрешности пространственного расположения изделия и нерегламентированным внутренним напряжениям в элементах устанавливаемого изделия и позиционирующего устройства. Это может произойти из-за разности температурных деформаций конструктивных элементов изделия и позиционирующего устройства, разности упругих деформаций конструктивных элементов позиционирующего устройства, возникающих от неравномерного расположения центра масс устанавливаемого изделия относительно элементов конструкции позиционирующего устройства, влияния зазоров в приводах управления позиционирующего устройства и других возмущающих воздействий. Так как полученная после совмещения носителей базовых точек изделия и внешних носителей базовых точек позиционирующего устройства система имеет жесткую структуру, то становятся невозможными корректирующие перемещения изделия для установки его в заданное положение.
Предлагаемым изобретением решается задача расширения функциональных возможностей известного устройства за счет обеспечения возможности выполнения по выбранным координатным направлениям компенсирующих перемещений внешних носителей базовых точек позиционирующего устройства, жестко сопряженных с носителями базовых точек изделия после их совмещения.
Этот технический результат достигается тем, что в известном позиционирующем устройстве, включающем не менее трех модулей координатных перемещений, каждый модуль имеет три блока для перемещений соответственно по трем координатным направлениям, на каждом модуле расположен внешний носитель базовых точек, выполненный с возможностью перемещения раздельно и независимо от других внешних носителей базовых точек для того, чтобы расположение внешних носителей базовых точек в пространстве в принятой системе координат соответствовало расчетному положению носителей базовых точек устанавливаемого изделия, а геометрический профиль каждого носителя внешних базовых точек выполнен геометрически ответным носителю базовых точек изделия в каждом модуле, блоки координатных перемещений выполнены с возможностью раздельного и независимого друг от друга переключения из фиксирующего положения, в котором положение внешних носителей базовых точек совпадает с расчетным положением носителей базовых точек устанавливаемого изделия, в расфиксированное положение со свободным вдоль координатного направления перемещением для выборки всех зазоров между внешними носителями базовых точек и носителями базовых точек устанавливаемого изделия и устранения монтажных напряжений.
Введенный признак предлагаемого изобретения представляет собой механизм фиксации и расфиксации приводов координатных перемещений, где расфиксированное положение привода позволяет задать свободное перемещение внешним носителям базовой точки для выбранного координатного направления для выборки всех зазоров между внешними носителями базовых точек и носителями базовых точек устанавливаемого изделия и устранения монтажных напряжений. Данный признак отсутствует в прототипе, следовательно, предлагаемое изобретение является новым.
Известны технические решения с применением приводов координатных перемещений по трем и более направлениям, например в манипуляционных роботах (Шахинпур М. Курс робототехники: Пер. с англ. - М.: Мир, 1990). Известны также механизмы фиксации и расфиксации приводов вдоль заданных координатных направлений, например, клиновинтовой зажим пиноли в задней бабке токарно-винторезного станка (Чернов Н.Н. Металлорежущие станки. - 4-е изд., перераб. и доп.- М.: Машиностроение, 1987, с.114). В заявляемом объекте использование приводов в заявляемой совокупности признаков, а именно выполнение приводов с установкой механизмов фиксации и расфиксации вдоль заданных координатных направлений, позволяет не только выполнять управляемое перемещение одной базовой точки устанавливаемого изделия вдоль заданного направления, но и обеспечить управляемое перемещение всей совокупности базовых точек изделия, создавая возможность изменять жесткую структуру системы «изделие - позиционирующее устройство», что позволяет направленно регулировать перемещения изделия вдоль заданного координатного направления, освобождая необходимое количество связей вдоль остальных координатных направлений. Такое сочетание признаков удовлетворяет требованию изобретательского уровня.
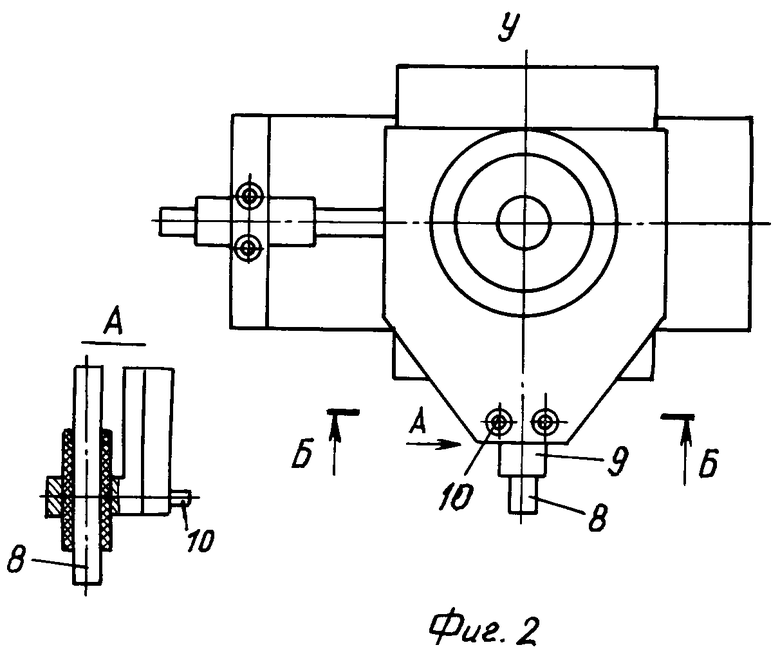
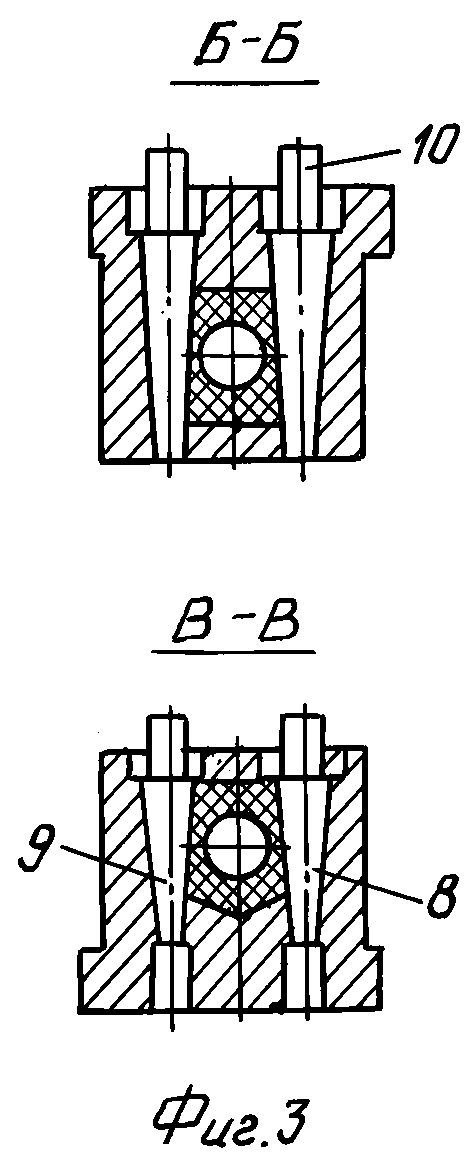
Предлагаемое изобретение иллюстрируется чертежом, на котором приведен один из вариантов одного модуля позиционирующего устройства. На фиг.1 показан вид модуля сбоку, на фиг.2 - вид сверху, на фиг.3 - разрезы по осям фиксирующих винтов.
Позиционирующее устройство включает в себя не менее трех модулей координатных перемещений (один из которых показан на чертеже). Каждый такой модуль, в свою очередь, имеет три блока перемещений по трем координатным направлениям X, Y и Z. На блоке вертикальных перемещений расположен внешний носитель базовых точек 1, который установлен на Z-ползуне 2, перемещающемся вдоль оси Z по направляющей втулке 3 с помощью передачи винт-гайка, состоящей из гайки 4 и винта, роль которого выполняет Z-ползун 2. Направляющая втулка 3 жестко закреплена на верхней поверхности Y-ползуна 5 для горизонтального перемещения. Y-ползун 5 установлен на верхней поверхности Х-ползуна 6 с возможностью горизонтального линейного перемещения с помощью, например, соединения типа «ласточкин хвост» и может совершать возвратно-поступательные перемещения вдоль оси Y. Х-ползун 6, в сою очередь, аналогичным образом закреплен на основании 7 и может совершать возвратно-поступательные перемещения вдоль оси X. Блоки горизонтальных перемещений включают механизмы фиксации и расфиксации привода перемещений, имеющие идентичную конструкцию и включающие: привод перемещений в виде передачи винт-гайка, состоящий из винтового толкателя 8 и гайки 9, имеющей на цилиндрической поверхности внешние лыски. Гайки 9 установлены в приливах ползуна 5 и основания 7 с возможностью фиксации с помощью фиксирующих винтов 10 с клиновым стержнем, входящих в сопряжение с поверхностью лыски гайки 9. На устанавливаемом изделии жестко закреплены носители базовых точек 11 (на чертеже устанавливаемое изделие не показано).
Позиционирующее устройство работает следующим образом. На устанавливаемом изделии в предварительно определенных положениях с известными значениями координат принятого координатного пространства закрепляют три носителя базовых точек изделия 11. Три модуля координатных перемещений устанавливают в монтажном пространстве под контролем системы координатных измерений так, чтобы положения базовых точек внешних носителей 1 совпали с расчетным положением носителей базовых точек изделия 11 в принятом координатном пространстве. Для этого все фиксирующие винты 10 приводов горизонтальных перемещений установлены в фиксирующее положение и путем перемещений приводов передач раздельно и независимо по каждому координатному направлению производятся необходимые манипуляции. Затем в зависимости от необходимого направления перемещений, у двух других модулей фиксирующие винты 10 устанавливают в расфиксирующее положение, освобождая гайки 9, и переключают модули в положение со свободным перемещением вдоль горизонтальных координатных направлений. Это позволяет установить изделие с выборкой всех зазоров и устранением монтажных напряжений, вызванных возмущающими воздействиями. Устанавливаемое изделие размещают на позиционирующем устройстве так, чтобы геометрически ответные поверхности носителей базовых точек изделия 11 сопрягались с внешними носителями базовых точек 1. Поскольку носители базовых точек изделия 11 и позиционирующего устройства 1 выполнены геометрически ответными, например, в виде ответных сферических поверхностей, то под действием возмущающих воздействий, возникающих из-за неучтенных перемещений масс, температурных деформаций и других, возникают реакции по поверхностям сопряжения носителей базовых точек, приводящие к смещениям вдоль направлений освобожденных приводов до полного устранения монтажных напряжений.
Затем винтами 10, освобождая или фиксируя толкатели 8, путем последовательных итераций осуществляется установка изделия в расчетное положение путем манипулирования включенными приводами координатных перемещений под контролем системы координатных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТАНОВКИ ИЗДЕЛИЯ В ЗАДАННОЕ ПРОСТРАНСТВЕННОЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2226168C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СБОРОЧНОЙ ОСНАСТКИ | 2018 |
|
RU2684876C1 |
| СПОСОБ ОЦЕНКИ ПОЗИЦИОНИРОВАНИЯ НАВЕСНОГО АГРЕГАТА ОТНОСИТЕЛЬНО ВНЕШНИХ ПОВЕРХНОСТЕЙ ПЛАНЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2818145C1 |
| КООРДИНАТНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1985 |
|
SU1840370A1 |
| СПОСОБ СБОРКИ ИЗДЕЛИЯ НА НЕСКОЛЬКИХ РАБОЧИХ ЭТАПАХ, КОМПЛЕКС СБОРОЧНЫХ ПРИСПОСОБЛЕНИЙ И ИСПОЛЬЗУЕМОЕ В НИХ ПЕРЕНОСНОЕ СБОРОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2012 |
|
RU2517920C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИУСА КРИВИЗНЫ ТРУБОПРОВОДА ПО ДАННЫМ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2592733C2 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
Изобретение относится к устройствам для установки изделий в заданное пространственное положение в принятой системе координат. Позиционирующее устройство включает не менее трех модулей координатных перемещений. Каждый модуль имеет три блока для перемещений соответственно по трем координатным направлениям. На каждом модуле расположен внешний носитель базовых точек, выполненный с возможностью перемещения раздельно и независимо от других внешних носителей базовых точек для того, чтобы расположение внешних носителей базовых точек в пространстве в принятой системе координат соответствовало расчетному положению носителей базовых точек устанавливаемого изделия. Геометрический профиль каждого носителя внешних базовых точек выполнен геометрически ответным носителю базовых точек изделия. В каждом модуле блоки координатных перемещений выполнены с возможностью раздельного и независимого друг от друга переключения из фиксирующего положения, в котором положение внешних носителей базовых точек совпадает с расчетным положением носителей базовых точек устанавливаемого изделия, в расфиксированное положение со свободным вдоль координатного направления перемещением для выборки всех зазоров между внешними носителями базовых точек и носителями базовых точек устанавливаемого изделия и устранения монтажных напряжений. В результате расширяются функциональные возможности устройства. 3 ил.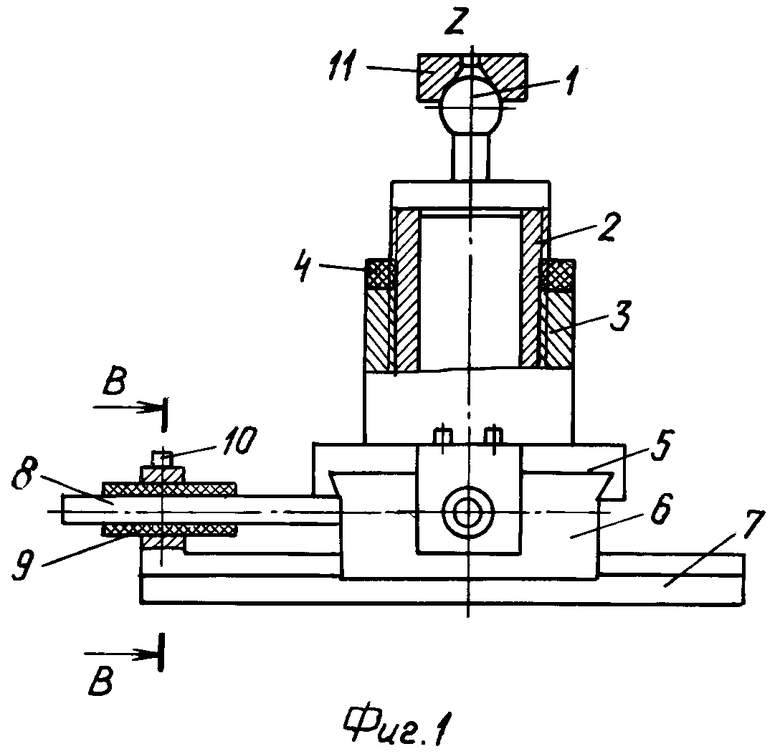
Позиционирующее устройство, включающее не менее трех модулей координатных перемещений, каждый модуль имеет три блока для перемещений, соответственно, по трем координатным направлениям, на каждом модуле расположен внешний носитель базовых точек, выполненный с возможностью перемещения раздельно и независимо от других внешних носителей базовых точек для того, чтобы расположение внешних носителей базовых точек в пространстве в принятой системе координат соответствовало расчетному положению носителей базовых точек устанавливаемого изделия, геометрический профиль каждого носителя внешних базовых точек выполнен геометрически ответным носителю базовых точек изделия, отличающееся тем, что в каждом модуле блоки координатных перемещений выполнены с возможностью раздельного и независимого друг от друга переключения из фиксирующего положения, в котором положение внешних носителей базовых точек совпадает с расчетным положением носителей базовых точек устанавливаемого изделия, в расфиксированное положение со свободным вдоль координатного направления перемещением для выборки всех зазоров между внешними носителями базовых точек и носителями базовых точек устанавливаемого изделия и устранения монтажных напряжений.
| СПОСОБ УСТАНОВКИ ИЗДЕЛИЯ В ЗАДАННОЕ ПРОСТРАНСТВЕННОЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2226168C1 |
| US 6085581 A, 11.07.2000 | |||
| JP 20011265441 A, 28.09.2001 | |||
| Устройство для точной установки положения объекта | 1978 |
|
SU783892A2 |

