Изобретение относится к области радиотехники, а более конкретно к способам обработки сигналов в системах позиционирования.
Задача определения местоположения подвижных объектов является одной из основных в современных системах телекоммуникации. К наиболее важным приложениям, которые требуют разработки надежных и высокоточных методов локации, можно отнести задачи по определению координат источников экстренных вызовов медицинской или технической помощи в городских условиях или в больших промышленных зонах, мониторинг расположения медицинского персонала в лечебных учреждениях, управление потоками транспорта на больших погрузочно-разгрузочных терминалах.
Наиболее развитыми можно считать навигационные системы, основанные на использовании дальномерного или разносно дальномерного способов позиционирования. Этот принцип положен в основу спутниковых навигационных систем, использующих технологии GPS или GLONASS, а также в основу систем локации мобильных абонентов в сетях сотовой связи CDMA или WCDMA. Кроме того, дальномерный способ определения местоположения может быть с успехом применен и для оценки координат пользователей внутри помещений.
Основной проблемой при создании дальномерных локационных систем является разработка эффективного алгоритма оценки задержки навигационного сигнала. Точность такого алгоритма является определяющим фактором качества работы системы локации. Среди наиболее известных алгоритмов слежения за задержкой навигационного сигнала можно назвать алгоритм синхронизации с окнами на задержку-опережение (см. Дж. Прокис "Цифровая связь" - М.: Радио и связь, 2000. - 800 с.) [1], который является одним из наиболее простых способов поиска максимума корреляционной функции принятого навигационного сигнала. Этот способ может быть реализован при помощи дискриминатора и 3-х Hardware корреляторов, с различными фиксированными или переменными задержками между временем начала генерации опорной последовательности (см., например, патент США №6088384) [2]. Этот алгоритм достаточно эффективен в условиях прямого распространения сигнала между приемником и передатчиком навигационного сигнала. В патентах США No 6636558 [3], 6687316 [4] и в опубликованной заявке США №20040057505 [5] рассмотрены различные модификации описанного метода слежения за задержкой. Общим для всех этих алгоритмов является то, что для их реализации требуется небольшое число Hardware корреляторов, которые позволяют получать значения корреляционной функции одновременно в нескольких временных позициях.
Известно также, что явление непрямого и многолучевого распространения электромагнитных волн существенно влияет на эффективность применения алгоритмов оценки задержки. При этом на приемной стороне наблюдается сложный сигнал, который представляет собой сумму копий передаваемого сигнала с различными и неизвестными задержками, амплитудами и фазами. Это может приводить к искажению формы корреляционного пика, а следовательно, к ошибкам в работе дискриминатора и ошибкам в оценке задержки сигнала. Поэтому указанный алгоритм слежения за задержкой с окнами на задержку-опережение позволит обеспечить корректную оценку псевдодальности только в случае разрешимой многолучевости, т.е. когда задержка многолучевых компонент больше половины длительности корреляционного пика для раннего луча сигнала.
В источниках [3] и [5] предлагаются различные способы усовершенствования алгоритма слежения за задержкой с окнами на задержку-опережение. Основная идея таких алгоритмов состоит в оценке изменения формы корреляционного пика при условии приема многолучевого сигнала. Для этого используется небольшое число дополнительных корреляторов.
Так, в патенте [3] предлагается использовать 4 коррелятора. На основе 4-х значений производится интерполяция корреляционной функции и поиск ее максимума. Кроме того, с целью уменьшения значения ошибок в оценке псевдодальности, вызванных многолучевостью, предлагается формировать коэффициент многолучевости и на его основе определять величину коррекции псевдодальности. Для этого на основе 4-х значений корреляционной функции предлагается формировать коэффициент, характеризующий асимметрию корреляционного пика. К недостаткам такого подхода можно отнести следующее. Для реализации такого решения требуется производить множество испытаний, на основе которых необходимо найти связь между коэффициентом асимметрии и величиной оценки псевдодальности. Кроме того, следует отметить, что в источнике [3] не приводится обоснования возможности получения такой однозначной связи.
Еще один вариант развития идеи синхронизатора с окнами на задержку-опережение предложен в [5]. Здесь для уменьшения влияния многолучевости предлагается использовать два дополнительных коррелятора, которые позволили бы отслеживать положение первого нуля корреляционной функции. Работоспособность такого подхода демонстрируется на примере треугольной корреляционной функции при наличии 2-х лучей в принятой реализации. В случае большего числа лучей, для реальных корреляционных функций, обладающих побочными максимумами, а также в низких отношениях сигнал/шум корректное слежение за первым нулем корреляционной функции может оказаться невозможным, а сам алгоритм малоэффективным.
Анализ описанных решений показывает, что алгоритмы, основанные на использовании малого числа корреляторов, позволяют оценивать задержку ранней многолучевой компоненты сигнала лишь в случае разрешимой многолучевости. В условиях неразрешимой многолучевости эти алгоритмы в лучшем случае позволяют лишь частично компенсировать ошибку псевдодальности. Таким образом, для повышения точности определения псевдодальности необходимо разработать алгоритм, позволяющий оценивать величину задержки ранней многолучевой компоненты сигнала.
Для решения этой проблемы необходимо использовать более полную информацию о значениях корреляционной функции. Этой цели можно достичь за счет увеличения числа Hardware корреляторов. Однако такое решение может оказаться достаточно дорогостоящим. Более простым в реализации представляется способ оценки задержки навигационного сигнала (псевдодальности), описанный в опубликованной международной заявке WO 9714049 [6]. Это решение является наиболее близким к предлагаемому и выбрано в качестве прототипа, который представляет собой следующую последовательность действий:
- Принимают навигационный сигнал, состоящий из непрерывно повторяющейся псевдослучайной последовательности, передаваемой на известной частоте несущей с использованием фазовой манипуляции.
- Получают последовательность значений синфазной и квадратурной компонент принимаемого сигнала путем преобразования с понижением частоты и оцифровкой принятого сигнала.
- Записывают в память оцифрованные значения реализации синфазной и квадратурной компонент принятого сигнала.
- Вычисляют значения корреляционных функций синфазного и квадратурного каналов путем осуществления свертки синфазной и квадратурной компонент каждого из сжатых блоков с известной псевдослучайной последовательностью.
- Осуществляют поиск временного положения максимума суммы квадратов корреляционных функций синфазного и квадратурного каналов.
Описанный способ представляет собой реализацию алгоритма задержки навигационного сигнала по максимуму корреляционной функции. Применение интерполяции позволяет повысить точность поиска максимума корреляционной функции, что увеличивает точность локации в условиях разрешимой многолучевости. Однако описанное решение не позволяет получить высокой точности локации в условиях неразрешимой многолучевости.
Задачей, на решение которой направлено заявляемое изобретение, является разработка такого алгоритма обработки навигационного сигнала, который бы позволил эффективно оценивать задержку ранней многолучевой компоненты навигационного сигнала в условиях неразрешимой многолучевости.
Технический результат достигается за счет создания алгоритма, позволяющего оценить временное положение ранней многолучевой компоненты навигационного сигнала, при этом в такой алгоритм предлагается ввести следующие, дополнительные по сравнению с прототипом, операции.
- Осуществляют интерполяцию корреляционных функций синфазного I(t) и квадратурного Q(t) каналов в пределах некоторого временного окна, включающего положение ее максимума.
- Осуществляют оценку числа и временного положения многолучевых компонент принятого навигационного сигнала по полученным интерполированным значениям корреляционных функций синфазных и квадратурных каналов.
- Выбирают для оценки псевдодальности значение временного положения ранней многолучевой компоненты.
При этом процедура оценки числа и временных положений лучей представляет собой следующую последовательность операций:
- Выбирают значение максимального числа многолучевых компонент, для которых будет осуществляться оценка задержки.
- Для всех возможных значений числа лучей, начиная с одного и заканчивая максимальным, формируют функции стоимости, аргументами которых являются временные положения числа лучей. Эти функции имеют вид:

где
n - предлагаемое число многолучевых компонент сигнала,
τi, i=1,2,...,n - временные позиции многолучевых компонент,
H - константа,
Bi,j - элементы матрицы, обратной к матрице R с элементами R(ti,tj), где функция R(u,ν) является автокорреляционной функцией принимаемого навигационного сигнала.
- Для каждого возможного значения числа лучей определяют оценки временного положения числа лучей как положение абсолютного максимума соответствующей функции стоимости.
- В качестве оценки числа лучей выбирается то число, для которого значение максимума соответствующей функции стоимости максимально.
Сущность заявляемого изобретения поясняется с привлечением графических материалов.
На Фиг.1 представлена последовательность операций по обработке принятого навигационного сигнала, предшествующая оценке псевдодальности, где
1. Преобразователь частоты
2. Аналогово-цифровой преобразователь
3. Запоминающее устройство
4. Цифровой сигнальный процессор
5. Антенна
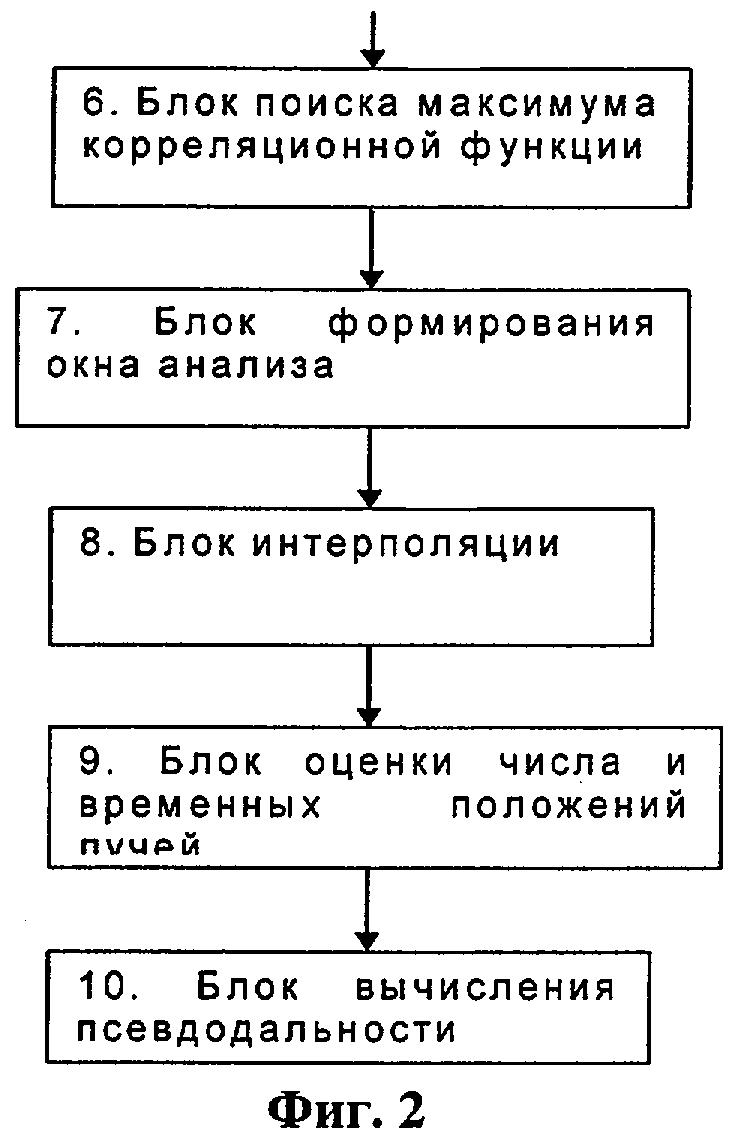
На Фиг.2 приведена блок-схема алгоритма оценки псевдодальности, где
6. Блок поиска максимума корреляционной функции
7. Блок формирования окна анализа
8. Блок интерполяции
9. Блок оценки числа и временных положений лучей
10. Блок вычисления псевдодальности.
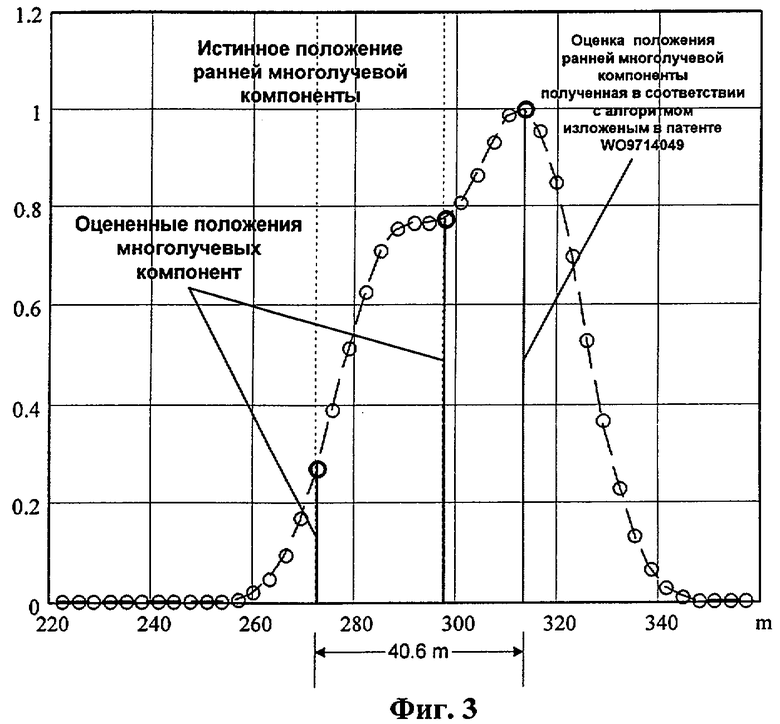
На Фиг.3 иллюстрируются результаты моделирования. Этот рисунок показывает, что предлагаемый алгоритм позволяет получать достоверную оценку временного положения ранней многолучевой компоненты в условиях неразрешимой многолучевости.
Рассмотрим основную идею предлагаемого алгоритма оценки числа и временных положений многолучевых компонент навигационного сигнала.
На Фиг.1 представлена последовательность тех операций по обработке принимаемого сигнала, которые предшествуют непосредственно алгоритму оценки временного положения ранней многолучевой компоненты. Принятую реализацию навигационного сигнала подают с антенны на вход преобразователя 1 частоты, в котором осуществляют операцию по переносу спектра входного сигнала в низкочастотную область. Результатом такого преобразования являются синфазная x(t) и квадратурная y(t) составляющие принимаемого сигнала. Эти составляющие подают на вход аналого-цифрового преобразователя 2, в котором производят оцифровку сигналов x(t) и y(t) с частотой дискретизации, превышающей частоту следования чипов псевдослучайной последовательности навигационного сигнала. Полученные в дискретные моменты времени tm значения синфазной X(tm) и квадратурной Y(tm) компонент входного сигнала подают на вход запоминающего устройства 3, в котором записывают выборку этих значений. Объем хранимых в запоминающем устройстве данных соответствует одному или нескольким периодам псевдослучайной последовательности навигационного сигнала. Затем по сигналу, поступающему от цифрового сигнального процессора 4, на его вход подают содержимое памяти запоминающего устройства. В цифровом сигнальном процессоре 4 производят разбиение данных на блоки, их когерентное сложение и согласованную фильтрацию, как описано в прототипе. Результатом этой обработки являются значения синфазной I(tm) и квадратурной Q(tm) компонент корреляционной функции входного сигнала, записанные на интервале, равном длительности периода псевдослучайной последовательности.
На основе полученных значений I(tm) и Q(tm) производят оценку числа и временных положений многолучевых компонент входного сигнала. Для изложения основной идеи предлагаемого метода оценки примем следующую модель синфазной x(t) и квадратурной компонент y(t) входного сигнала

Здесь S(t) - передаваемый навигационный сигнал, n - неизвестное число лучей, Ak, ϕk, τk соответственно - неизвестные амплитуда, фаза и задержка k-й (k=1,2,...,n) многолучевой компоненты сигнала, n1(t) и nQ(t) - шумовые составляющие синфазной и квадратурной компонент.
Рассмотрим следующую функцию стоимости

где А1k=Aksin(ϕk), AQk=Akcos(ϕk), Т - длительность периода псевдослучайной последовательности. Эта функция стоимости характеризует среднее значения квадрата разности между принятым сигналом и сигналом, синтезированным на основе предполагаемых значений неизвестных параметров. Оценку неизвестных параметров находят как положение максимума этой функции. Максимум функции стоимости по неизвестным AIk и AQk находят аналитически. Поэтому, максимизируя эту функцию по неизвестным AIk и AQk и отбрасывая слагаемые и сомножители, независящие от неизвестных параметров, получим новую функцию стоимости, которая зависит только от неизвестного числа и временных положений многолучевых компонент сигнала

где  - синфазные и квадратурные составляющие корреляционной функции принятого сигнала, Bi,j - элементы матрицы, обратной к матрице R с элементами
- синфазные и квадратурные составляющие корреляционной функции принятого сигнала, Bi,j - элементы матрицы, обратной к матрице R с элементами
Полученная функция стоимости используется для оценки временных положений многолучевых компонент сигнала при фиксированном значении числа этих компонент n, однако эта функция монотонно зависит от n. Поэтому она не может быть непосредственно применена для оценки числа многолучевых компонент. Для решения этой задачи компонент внесем в полученную функцию стоимости дополнительное слагаемое -nH, препятствующее решению о завышенном числе многолучевых компонент. Окончательно получаем следующую функцию

В результате, оценки неизвестного числа и временных положений многолучевых компонент сигнала определяют как положение абсолютного максимума этой функции:

Отметим, что величину постоянной Н выбирают следующим образом
H=h·cf(τ,1),
где h - заранее выбранная константа.
На Фиг.2 представлена блок-схема алгоритма определения псевдодальности, основанного на оценке временного положения ранней многолучевой компоненты принятого навигационного сигнала. Рассмотрим последовательно процедуру этой оценки.
На вход блока 6 поиска максимума корреляционной функции поступают отсчеты корреляционных функций синфазной I(t) и квадратурной Q(f) компонент, полученные с частотой дискретизации, установленной в аналогово-цифровом преобразователе 2. Эти значения возводят в квадрат и суммируют
I2(t)+Q2(t).
Затем в пределах интервала времени, соответствующего длительности периода псевдослучайной последовательности, производят поиск положения максимума функции I2(t)+Q2(t).
Номер отсчета дискретизации, в котором указанная функция достигает своего максимума, передают на вход блока 7 формирования окна анализа. В этом блоке определяют номера отсчетов функций I(t) и Q(t), которые будут использованы для оценки числа и временных положений многолучевых компонент сигнала. Поиск максимального и минимального значений номеров отсчетов окна анализа осуществляют на основе сравнения значения функции I2(t)+Q2(t) с некоторым порогом Th. Значение этого порога выбирают, например, следующим образом

где α - заранее выбранная константа.
Значения функций I(t) и Q(t) в пределах окна анализа передают на вход блока 8 интерполяции. В этом блоке вычисляют интерполированные значения I(t) и Q(t) в моменты времени, расположенные между отсчетами дискретизации. При этом используют различные известные методы интерполяции, например параболическая интерполяция или интерполяция сплайнами.
Интерполированные в пределах окна анализа значения функций I(t)и Q(t) передают на вход блока 9 оценки числа и временных положений. В этом блоке производят оценку числа и временных положений лучей в соответствии с описанным выше алгоритмом. Рассмотрим работу этого блока на следующем примере. Выберем для анализа максимальное число многолучевых компонент, равное 2. Сформируем 2 функции стоимости, которые соответствуют гипотезам о наличии одного и двух многолучевых компонент в принятой реализации сигнала.
cf(τ,1)=Q2(τ)+I2(τ)

Затем путем перебора всех значений времени в пределах окна анализа, соответствующих интерполированным значениям функций I(t)и Q(t), производят поиск максимума полученных функций стоимости
cf1=maxcf(τ,1), cf2=maxcf(τ1,τ2,2)
Отметим, что поиск максимума функции стоимости cf(τ1,τ2,2) должен производиться по всем значениям  и
и  , удовлетворяющим условию
, удовлетворяющим условию
|τ1-τ2|>Δ,
где Δ - заранее выбранная константа. Введение этого условия позволяет избежать сингулярности функции cf(τ1,τ2,2) при τ1=τ2 и избежать ошибочного завышения значений функции стоимости, обусловленного конечной точностью вычислений.
Далее производят сравнение двух значений
CF1=cf1 и CF2=cf2-h·cf1
Если CF2>CF1, то в качестве оценки временного положения ранней многолучевой компоненты  выбирают минимальное из значений и , где (,)=argmaxcf(τ1,τ2,2).
выбирают минимальное из значений и , где (,)=argmaxcf(τ1,τ2,2).
В противном случае в качестве оценки временного положения ранней многолучевой компоненты сигнала принимают значение
τ=argmaxcf(τ,1).
При практической реализации описанного алгоритма численное значение константы h обычно выбирают равным 0.2.
Отметим, что для реализации предложенного алгоритма необходимо знать явный вид корреляционной функции R(t1,t2). В реальной системе вид корреляционной функции может отличаться от корреляционной функции псевдослучайной последовательности по причине использования полосовых фильтров. Поэтому требуется создать модель R(t1,t2).
В данном техническом решении в качестве модели R(t1,t2) предлагается использовать функцию вида

Константы a, b, c, d оценивают любым из известных методов оценки параметров на основе экспериментально полученной корреляционной функции.
Полученную оценку временного положения раннего луча подают на вход блока 10 вычисления псевдодальности. В этом блоке производят пересчет номера отсчета интерполяции, соответствующего оценке временного положения раннего луча в псевдодальность.
Эффективность предложенного решения была проверена в процессе моделирования. При моделировании были выбраны следующие параметры:
- Навигационный сигнал представляет собой m-последовательность длиной 127
- При генерации сигнала используется полосовой фильтр
- Частота следования чипов последовательности - 11 МГц
- Частота дискретизации ˜ 95,7 МГц
- Число многолучевых компонент в принимаемом сигнале 1 или 2.
На Фиг.3 показан вид суммы квадратов корреляционных функций синфазного и квадратурного каналов в ситуации, когда разность времен прихода лучей составляет порядка 0,3 длительности чипа.
Из этого чертежа видно, что положение максимума данной функции не соответствует временному положению ранней многолучевой компоненты сигнала. Поэтому алгоритм, описанный в прототипе, не позволяет корректно оценивать задержку ранней многолучевой компоненты в условиях неразрешимой многолучевости.
Как видно из Фиг.3, предлагаемый алгоритм позволяет в подобных ситуациях осуществлять оценку задержки ранней многолучевой компоненты сигнала и, следовательно, существенно снизить величину многолучевой ошибки при оценке псевдодальности.
Предлагаемый алгоритм может быть реализован на современных микропроцессорах цифровой обработки сигналов (DSP), например, TMS 320Схх, Motorola 56xxx, Intel и т.п.
Изобретение относится к области радиотехники, а более конкретно к способам обработки сигналов в системе позиционирования. Технический результат заключается в повышении точности оценки задержки ранней многолучевой компоненты навигационного сигнала в условиях неразрешимой многолучевости. Технический результат достигается тем, что принимают навигационный сигнал, получают последовательность значений синфазной и квадратурной компонент принимаемого сигнала путем преобразования с понижением частоты и оцифровкой принятого сигнала, записывают в память оцифрованные значения синфазной и квадратурной компонент принятого сигнала, вычисляют значения корреляционных функций синфазного и квадратурного каналов путем осуществления свертки синфазной и квадратурной составляющей упомянутого сигнала с известной псевдослучайной последовательностью, осуществляют поиск временного положения максимума суммы квадратов корреляционных функций синфазного и квадратурного каналов, осуществляют интерполяцию корреляционных функций синфазного I(t) и квадратурного Q(t) каналов в пределах временного окна анализа, включающего положение указанного максимума, осуществляют оценку числа и временного положения многолучевых компонент принятого сигнала по полученным интерполированным значениям синфазной и квадратурной компонент, выбирают для оценки псевдодальности значение временного положения ранней многолучевой компоненты. 3 з.п. ф-лы, 3 ил.
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| US 6727846 В1, 27.04.2004 | |||
| US 6636558 B1, 21.10.2003 | |||
| US 5615232 A, 25.03.1997 | |||
| WO 03036233 A2, 01.05.2003. | |||

