Изобретение относится к геодезии, в частности к способам определения вектора относительного положения объекта. Объектами могут служить уголковые отражатели, участки земной поверхности, строения, воздушные и космические летательные аппараты, морские и речные суда и т.п. Изобретение может быть использовано в системах воздушной, морской и космической навигации, а также при наземной послеполетной обработке зарегистрированных данных средств бортовых измерений (СБИ) подвижных носителей для оценки погрешностей измерения вектора относительного положения объекта как бортовыми средствами, в частности радиолокатором, лазерным дальномером и т.п., так и наземными стационарными системами, в частности радиосистемами ближней и дальней навигации.
В дальнейшем рассмотрим, как общий, случай размещения навигационного комплекса на борту подвижного носителя. Под вектором относительного положения объекта понимают вектор положения объекта относительно носителя.
Для определенности в качестве подвижного носителя рассмотрим летательный аппарат (ЛА) с размещенными на нем навигационным комплексом и упомянутым устройством. Навигационный комплекс измеряет геодезические координаты ЛА: долготу LA, широту BA и высоту НA. Геодезические координаты объекта: долгота LЦ, широта BЦ и высота НЦ либо определены заранее путем геодезической привязки (неподвижный наземный объект типа уголкового отражателя), либо измерены (подвижный объект типа ЛА с размещенным на нем навигационным комплексом) с помощью, например, глобальной навигационной спутниковой системы (ГНСС) [ГОСТ Р 51794-2001. Государственный стандарт Российской Федерации. Аппаратура радионавигационная глобальной навигационной спутниковой системы и глобальной системы позиционирования. Системы координат. Методы преобразований координат определяемых точек. - М.: Госстандарт России, с.1...2]. Данным изобретением решается обратная пространственная геодезическая задача определения вектора  относительного положения объекта по известным геодезическим координатам: широте ВА, долготе LА и высоте НА навигационного комплекса носителя и геодезическим координатам объекта: долготе LЦ, широте ВЦ и высоте НЦ [Морозов В.П. Курс сфероидической геодезии. - М.: Недра, 1979, с.197].
относительного положения объекта по известным геодезическим координатам: широте ВА, долготе LА и высоте НА навигационного комплекса носителя и геодезическим координатам объекта: долготе LЦ, широте ВЦ и высоте НЦ [Морозов В.П. Курс сфероидической геодезии. - М.: Недра, 1979, с.197].
Определим используемую ниже терминологию. Геодезические координаты связаны с общеземным эллипсоидом (ОЗЭ), размер и форму которого задают двумя параметрами: большой полуосью а и эксцентриситетом е [ГОСТ Р 51794-2001, с.1-3]. Под угловой ориентацией носителя (например, ЛА) относительно земли понимают значения углов тангажа ϑ, крена γ и рыскания ψ [ГОСТ 20058-80. Государственный стандарт Союза ССР. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения. - М.: Государственный комитет СССР по стандартам, 1981, с.9], либо матрицу направляющих косинусов [там же, с.43] между осями OX, OY, OZ связанной СК и осями OXg, OYg, OZg нормальной СК [там же, с.4]. Начало О нормальной СК OXgYgZg совпадает с началом связанной системы координат носителя, ось OYg направлена по нормали к поверхности ОЗЭ, ось OXg направлена в сторону оси вращения ОЗЭ. Угол курса ψк отличается от угла рыскания ψ противоположным направлением положительного отсчета. Нормальная система координат ОХgYgZg, принятая в динамике ЛА в атмосфере, совпадает с топоцентрической декартовой прямоугольной системой координат Оξςη, принятой в сфероидической геодезии. Системы координат OXYZ и OXgYgZg являются системами координат носителя (ЛА), поскольку их начало О связано с носителем.
Вектор относительного положения объекта в топоцентрической системе координат задают либо его составляющими 

 в декартовых прямоугольных координатах либо полярными координатами - наклонной дальностью DЦ, геодезическим азимутом АЦ и зенитным расстоянием ZЦ [Морозов В.П. Курс сфероидической геодезии. - М.: Недра, 1979, с.189...190]. Задание вектора относительного положения объекта полярными координатами DЦ, АЦ и ZЦ является одной из форм его задания в системе координат носителя.
в декартовых прямоугольных координатах либо полярными координатами - наклонной дальностью DЦ, геодезическим азимутом АЦ и зенитным расстоянием ZЦ [Морозов В.П. Курс сфероидической геодезии. - М.: Недра, 1979, с.189...190]. Задание вектора относительного положения объекта полярными координатами DЦ, АЦ и ZЦ является одной из форм его задания в системе координат носителя.
Введем локальную декартову геоцентрическую прямоугольную систему координат OгXгYгZг, связанную с положением носителя. Начало Ог ее поместим в центре ОЗЭ. Плоскость ОгХгYг расположим в меридианной плоскости, содержащей носитель, ось ОгХг направим вдоль пересечения меридианной плоскости с экваториальной плоскостью ОЗЭ от точки Ог к проекции точки О на это пересечение, ось ОгYг направим в меридианной плоскости на северный полюс ОЗЭ, ось ОгZг дополняет СК до правой и лежит в экваториальной плоскости ОЗЭ.
Прототипом изобретения может быть следующий способ определения вектора относительного положения объекта [Морозов В.П. Курс сфероидической геодезии. - М.: Недра, 1979, с.197...198].
Способ определения вектора относительного положения объекта, в котором определяют геодезические координаты LА, ВА, НА навигационного комплекса носителя и геодезические координаты LЦ, ВЦ, НЦ объекта, вычисляют в декартовой геоцентрической системе координат векторы положения навигационного комплекса  и объекта,
и объекта,  определяют вектор относительного положения
определяют вектор относительного положения  объекта вычитанием из вектора положения объекта
объекта вычитанием из вектора положения объекта  вектора положения навигационного комплекса
вектора положения навигационного комплекса 
 и пересчитывают вектор относительного положения
и пересчитывают вектор относительного положения  объекта в систему координат OXgYgZg носителя.
объекта в систему координат OXgYgZg носителя.
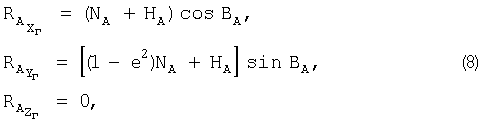
В декартовой геоцентрической системе координат компоненты вектора положения навигационного комплекса  вычисляют по формулам
вычисляют по формулам
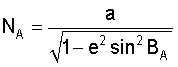
где вспомогательная переменная
а компоненты вектора положения объекта  - по формулам
- по формулам
где вспомогательная переменная
Вектор относительного положения  объекта определяют вычитанием из вектора положения
объекта определяют вычитанием из вектора положения  объекта вектора положения
объекта вектора положения  навигационного комплекса:
навигационного комплекса:
Вектор относительного положения объекта пересчитывают в нормальную систему координат носителя следующим образом:
или, используя правые части выражений (1) и (2),
Компоненты вектора относительного положения  объекта в полярной системе координат носителя находят следующим образом:
объекта в полярной системе координат носителя находят следующим образом:
- наклонную дальность Dци

- зенитное расстояние ZЦи

где
- геодезический азимут АЦи
с учетом знаков 
Недостатком этого способа определения вектора относительного положения  объекта являются неприемлемые для некоторых целей погрешности
объекта являются неприемлемые для некоторых целей погрешности  его определения. Это вызвано следующими обстоятельствами.
его определения. Это вызвано следующими обстоятельствами.
Измеряемые геодезические координаты навигационного комплекса носителя являются координатами его определенной части. Так при использовании на носителе аппаратуры ГНСС измеряются координаты LA, BA и НA антенны этой аппаратуры, т.е. навигационного комплекса. Поэтому вектор относительного положения  объекта определяет вектор положения объекта относительно упомянутого навигационного комплекса носителя.
объекта определяет вектор положения объекта относительно упомянутого навигационного комплекса носителя.
При оценке точностных характеристик размещенного на носителе устройства измерения относительного положения объекта требуется альтернативное определение положения объекта относительно упомянутого устройства. На носителе навигационный комплекс и упомянутое устройство пространственно разнесены относительно друг друга, причем величина этого разноса  может изменяться от нескольких метров на ЛА до десятков и сотен метров на корабле или суше. Современные устройства измерения относительного положения объекта, в частности лазерные дальномеры, обеспечивают измерения дальности с погрешностями менее 1 м. Поэтому при оценке точностных характеристик подобных устройств альтернативный вектор относительного положения объекта должен определять положение объекта относительно самого упомянутого устройства с учетом вектора относительного положения упомянутого навигационного комплекса на носителе и угловой ориентации носителя относительно земли.
может изменяться от нескольких метров на ЛА до десятков и сотен метров на корабле или суше. Современные устройства измерения относительного положения объекта, в частности лазерные дальномеры, обеспечивают измерения дальности с погрешностями менее 1 м. Поэтому при оценке точностных характеристик подобных устройств альтернативный вектор относительного положения объекта должен определять положение объекта относительно самого упомянутого устройства с учетом вектора относительного положения упомянутого навигационного комплекса на носителе и угловой ориентации носителя относительно земли.
При движении носителей в плотных строях расстояние между ними соизмеримо с линейными размерами самих носителей, поэтому при определении относительного положения носителя также необходимо определять вектор относительного положения навигационного комплекса на носителе и угловую ориентацию носителя относительно земли.
Обозначим в декартовой геоцентрической СК через  вектор положения навигационного комплекса, через - вектор относительного положения упомянутого навигационного комплекса, через
вектор положения навигационного комплекса, через - вектор относительного положения упомянутого навигационного комплекса, через  - вектор положения объекта, тогда вектор относительного положения объекта определяется следующим выражением (см. чертеж)
- вектор положения объекта, тогда вектор относительного положения объекта определяется следующим выражением (см. чертеж)

В известном способе определения вектора относительного положения объекта вектор относительного положения объекта определяют согласно (2) другим выражением

не содержащим вектора относительного положения навигационного комплекса. Выражение (6), как видно из чертежа, определяет вектор относительного положения  объекта относительно навигационного комплекса. Это приводит в известном способе к погрешности
объекта относительно навигационного комплекса. Это приводит в известном способе к погрешности  вычисления вектора относительного положения объекта, определяемой из выражений (5) и (6)
вычисления вектора относительного положения объекта, определяемой из выражений (5) и (6)

и равной величине вектора относительного положения навигационного комплекса.
Максимальные погрешности измерения дальности современными лазерными дальномерами составляют величину менее 1 м. Следовательно, известный способ приводит к определению вектора относительного положения объекта с недопустимо большой методической погрешностью, поскольку величина вектора относительного положения навигационного комплекса, как указывалось выше, по модулю может достигать значений от нескольких метров до десятков метров.
Недостатком известного способа является также неограниченное возрастание погрешности  определения зенитного расстояния ZЦи вблизи его значений, равных 0 или π. Это следует из выражения (3), согласно которому
определения зенитного расстояния ZЦи вблизи его значений, равных 0 или π. Это следует из выражения (3), согласно которому
где введено обозначение
Недостатком известного способа является также неограниченное возрастание погрешности  определения геодезического азимута АЦи вблизи его значений, кратных
определения геодезического азимута АЦи вблизи его значений, кратных  . Это следует из выражения (4), согласно которому
. Это следует из выражения (4), согласно которому
где введено обозначение
Задачей изобретения является повышение точности определения вектора относительного положения объекта.
Задача решается с помощью способа определения вектора относительного положения объекта, в котором определяют геодезические координаты объекта и расположенного на носителе навигационного комплекса, вычисляют в декартовой геоцентрической системе координат вектор положения навигационного комплекса и вектор положения объекта, определяют вектор относительного положения объекта вычитанием из вектора положения объекта вектора положения навигационного комплекса и пересчитывают вектор относительного положения объекта в систему координат носителя, согласно изобретению дополнительно к геодезическим координатам навигационного комплекса и объекта определяют вектор относительного положения упомянутого навигационного комплекса на носителе и угловую ориентацию носителя относительно земли, в декартовой геоцентрической системе координат дополнительно к вектору положения навигационного комплекса и вектору объекта вычисляют вектор относительного положения навигационного комплекса на носителе и дополнительно вычитают его при упомянутом определении вектора относительного положения объекта.
В качестве системы координат носителя может быть использована полярная система координат. С целью снижения погрешности определения зенитного расстояния объекта при пересчете вектора относительного положения объекта в систему координат носителя зенитное расстояние в ней определяют по отношениям проекций вектора относительного положения объекта на вертикальную ось и горизонтальную плоскость системы координат носителя к модулю вектора относительного положения объекта.
С целью снижения погрешности определения геодезического азимута объекта при пересчете вектора относительного положения объекта в систему координат носителя геодезический азимут определяют по величинам отношений проекций вектора относительного положения объекта на оси горизонтальной плоскости системы координат носителя к проекции вектора относительного положения объекта на упомянутую плоскость.
Предлагаемое изобретение позволяет определять вектор относительного положения объекта с более высокой точностью.
Применение предлагаемого способа иллюстрируется чертежом.
На чертеже в декартовой геоцентрической системе координат показаны:
- вектор положения навигационного комплекса,
- вектор относительного положения навигационного комплекса на носителе,
- вектор положения объекта,
 - вектор относительного положения объекта, определяемый известным способом,
- вектор относительного положения объекта, определяемый известным способом,
 - вектор относительного положения объекта, определяемый предлагаемым способом.
- вектор относительного положения объекта, определяемый предлагаемым способом.
Предлагаемый способ определения геодезических координат объекта заключается в следующем.
1. Определяют геодезические координаты объекта LЦ, ВЦ, НЦ и расположенного на носителе навигационного комплекса LA, ВA, HA.
2. Дополнительно к геодезическим координатам навигационного комплекса и объекта определяют вектор  относительного положения упомянутого навигационного комплекса на носителе и угловую ориентацию ϑ, γ, ψ носителя относительно земли.
относительного положения упомянутого навигационного комплекса на носителе и угловую ориентацию ϑ, γ, ψ носителя относительно земли.
Определение вектора относительного положения навигационного комплекса на носителе необходимо для точного определения вектора относительного положения объекта, поэтому является существенным признаком изобретения. Определение угловой ориентации ϑ, γ, ψ носителя относительно земли также является существенным признаком изобретения, поскольку указанные углы необходимы для вычисления вектора относительного положения навигационного комплекса в декартовой геоцентрической системе координат.
3. Вычисляют в декартовой геоцентрической системе координат вектор положения навигационного комплекса
где
и вектор положения объекта
где
4. Вычисляют в декартовой геоцентрической системе координат вектор относительного положения  навигационного комплекса на носителе
навигационного комплекса на носителе

где

Данная операция необходима для учета вектора относительного положения навигационного комплекса при вычислении в декартовой геоцентрической системе координат вектора положения  объекта, поэтому является существенным признаком изобретения.
объекта, поэтому является существенным признаком изобретения.
5. Определяют вектор  относительного положения объекта вычитанием из вектора положения объекта вектора навигационного комплекса и дополнительно учитывают (вычитают) при этом определении вектор относительного положения навигационного комплекса на носителе
относительного положения объекта вычитанием из вектора положения объекта вектора навигационного комплекса и дополнительно учитывают (вычитают) при этом определении вектор относительного положения навигационного комплекса на носителе
Учет вектора относительного положения навигационного комплекса на носителе при определении вектора относительного положения объекта обеспечивает исключение методической погрешности (7) определения упомянутого вектора относительного положения, поэтому является существенным признаком изобретения.
6. Пересчитывают вектор относительного положения объекта в систему координат OXgYgZg носителя
или, используя выражения (8) и (9),

В качестве системы координат носителя может быть использована полярная система координат. По составляющим 

 вектора относительного положения объекта пересчитывают этот вектор в полярную систему координат.
вектора относительного положения объекта пересчитывают этот вектор в полярную систему координат.
Наклонную дальность DЦ находят по формуле

Зенитное расстояние ZЦ - по формулам


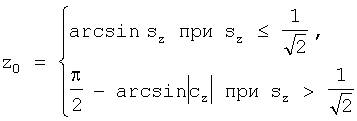
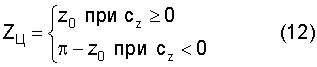
Определение зенитного расстояния ZЦ (12) в полярной системе координат по отношениям (10), (11) проекций 
 вектора относительного положения объекта на вертикальную ось и горизонтальную плоскость системы координат носителя к модулю DЦ вектора относительного положения объекта является существенным признаком изобретения, поскольку исключает неограниченное возрастание погрешности δZЦ определения зенитного расстояния ZЦ вблизи его значений, равных 0 или π.
вектора относительного положения объекта на вертикальную ось и горизонтальную плоскость системы координат носителя к модулю DЦ вектора относительного положения объекта является существенным признаком изобретения, поскольку исключает неограниченное возрастание погрешности δZЦ определения зенитного расстояния ZЦ вблизи его значений, равных 0 или π.
Геодезический азимут АЦ - по формулам


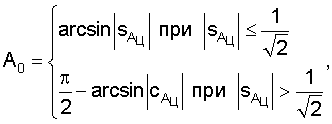
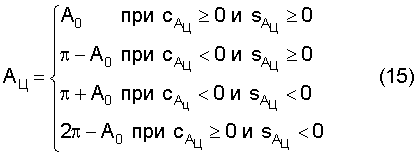
Определение геодезического азимута АЦ (15) в полярной системе координат по величинам отношений (13), (14) проекций 
 вектора относительного положения объекта на оси горизонтальной плоскости системы координат носителя к проекции
вектора относительного положения объекта на оси горизонтальной плоскости системы координат носителя к проекции  вектора относительного положения объекта на горизонтальную плоскость является существенным признаком изобретения, поскольку исключает неограниченное возрастание погрешности δАЦ определения геодезического азимута АЦ вблизи его значений, кратных .
вектора относительного положения объекта на горизонтальную плоскость является существенным признаком изобретения, поскольку исключает неограниченное возрастание погрешности δАЦ определения геодезического азимута АЦ вблизи его значений, кратных .
Предлагаемое изобретение позволяет определять вектор относительного положения объекта с более высокой точностью, поскольку исключает методические погрешности определения вектора относительного положения объекта известным способом, вызванные как не учетом вектора относительного положения навигационного комплекса на носителе, так и методами определения зенитного расстояния и геодезического азимута объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ ОБЪЕКТА | 2005 |
|
RU2292526C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| Способ определения начальной ориентации объекта | 2024 |
|
RU2836114C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2020 |
|
RU2754087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2024 |
|
RU2820026C1 |
| Способ горизонтирования системы координат угломерного прибора по двум опорным точкам | 2024 |
|
RU2832842C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| Способ измерения уклонений отвесной линии и устройство для его реализации | 2020 |
|
RU2750999C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
Изобретение относится к измерительной технике и может найти применение в навигационных системах. Технический результат - повышение точности измерений. Для достижения данного результата определяют геодезические координаты объекта и расположенного на носителе навигационного комплекса. Вычисляют в декартовой геоцентрической системе координат (СК) векторы положения навигационного комплекса и объекта. Определяют вектор относительного положения объекта вычитанием из вектора положения объекта вектора положения навигационного комплекса и пересчитывают вектор относительного положения объекта в СК носителя. При этом определяют вектор относительного положения навигационного комплекса на носителе и угловую ориентацию носителя относительно земли. В декартовой геоцентрической СК дополнительно вычисляют вектор относительного положения навигационного комплекса на носителе и вычитают его при определении вектора относительного положения объекта. 3 з.п. ф-лы, 1 ил.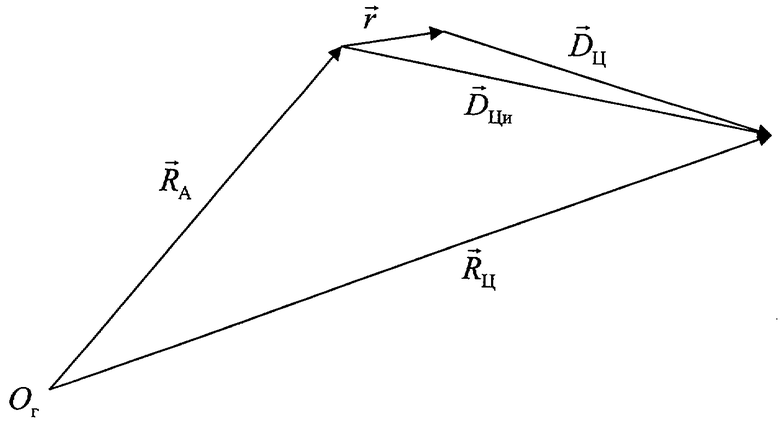
| Морозов В.П | |||
| Курс сфероидической геодезии | |||
| - М.: Недра, 1979, с.197-198 | |||
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| US 3883812 А, 13.05.1975 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |
| Математическое и программное обеспечение системы автономной навигации КА «Янтарь» | |||
| М.: МО СССР, 1986, с.65. | |||

