Изобретение относится к управлению летательными аппаратами, в частности к устройствам управления зенитными управляемыми ракетами (ЗУР) симметричной аэродинамической компоновки, стабилизированными по крену.
Известен автопилот для симметричной ракеты, стабилизированной по крену, содержащий последовательно включенные датчик текущей скорости полета, пороговый блок и управляемый коммутатор, а в каждом из двух каналов поперечного управления последовательно соединенные задатчик команд, блок сравнения, усилитель с переменным коэффициентом усиления, сумматор и интегратор, выход которого подключен к сервоприводу, датчик угловой скорости, выход которого подключен к сервоприводу и второму входу сумматора, датчик поперечной перегрузки, первый выход которого соединен со вторым входом блока сравнения, а второй выход - с входом блока определения модуля, первый выход которого соединен с первым входом компаратора, а второй выход - с входом масштабного усилителя, выход которого соединен со вторым входом компаратора противоположного канала поперечного управления; выходы компараторов соединены со вторым и третьим входами управляемого коммутатора, первый и второй выход которого соединены со вторым входом усилителя с переменным коэффициентом усиления, соответственно, первого и второго канала поперечного управления [1].
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного автопилота, является ограничение функциональных возможностей автопилота, обусловленное тем, что датчик текущей скорости полета используется только в целях обеспечения заданного качества пространственного управления ЗУР в ограниченном диапазоне скоростей.
Задачей изобретения и техническим результатом при его осуществлении является расширение функциональных возможностей автопилота симметричной ЗУР, стабилизированной по крену.
Это достигается тем, что в известный автопилот для симметричной ракеты, стабилизированной по крену, содержащий два идентичных по структуре канала поперечного управления (КПУ), каждый из которых содержит датчик угловой скорости, последовательно соединенные датчик поперечной перегрузки и блок сравнения, последовательно соединенные первый сумматор и первый интегратор, согласно изобретению введены блок приема первичной полетной информации, блок формирования законов коррекции передаточных чисел, блок распределения законов коррекции передаточных чисел, блок формирования сигналов управления приводами рулей ракеты, причем третий и четвертый выход блока приема первичной полетной информации соединены соответственно с первым и вторым входом блока формирования законов коррекции передаточных чисел, первый, второй и третий выходы которого соединены соответственно с первым-третьим входами блока распределения законов коррекции передаточных чисел, а в каждый из КПУ введены первый, второй и третий усилители коррекции, второй сумматор, причем первый вход первого усилителя коррекции соединен с выходом блока сравнения, а выход - с первым входом первого сумматора, первые входы второго и третьего усилителей коррекции соединены с выходом датчика угловой скорости, выход второго усилителя коррекции соединен со вторым входом первого сумматора, выход третьего усилителя коррекции соединен с первым входом второго сумматора, первый вход которого соединен с выходом интегратора, выход второго сумматора, являясь выходом канала, подключен к соответствующему входу блока формирования сигналов управления приводами рулей ракеты, при этом первый и второй выходы блока приема первичной полетной информации подключены к второму входу блока сравнения соответственно первого и второго КПУ; первый, второй и третий выходы блока распределения законов коррекции передаточных чисел подключены ко вторым входам соответственно первого, второго и третьего усилителей коррекции первого КПУ, а четвертый, пятый и шестой входы этого блока подключены к выходам данных усилителей коррекции; четвертый, пятый и шестой выходы блока распределения законов коррекции передаточных чисел подключены ко вторым входам соответственно первого, второго и третьего усилителей коррекции второго КПУ, а седьмой, восьмой и девятый входы этого блока подключены к выходам данных усилителей коррекции.
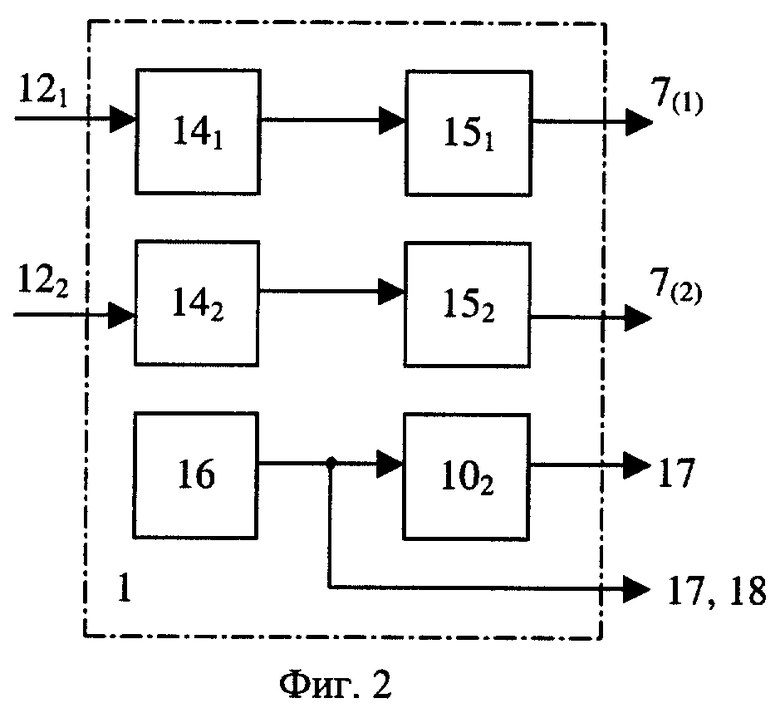
Блок приема первичной полетной информации содержит последовательно включенные первый регистр и первый преобразователь КОД-АНАЛОГ, выход которого является первым выходом блока, последовательно включенные второй регистр и второй преобразователь КОД-АНАЛОГ, выход которого является вторым выходом блока, последовательно включенные датчик продольной перегрузки ракеты и второй интегратор, выход которого является третьим выходом блока, четвертым выходом которого является выход датчика продольной перегрузки ракеты.
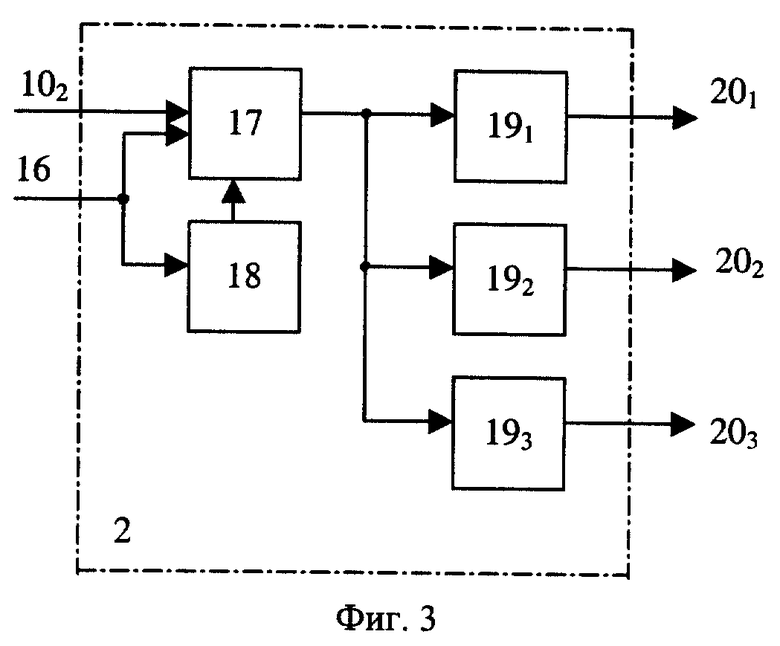
Блок формирования законов коррекции передаточных чисел содержит коммутатор, переключатель и три формирователя сигналов коррекции, при этом первый вход коммутатора является первым входом блока, второй вход коммутатора и вход переключателя объединены и являются вторым входом блока, выход переключателя соединен с третьим входом коммутатора, к выходу которого подключены входы формирователей сигналов коррекции, выходы которых являются первым, вторым и третьим выходами блока.
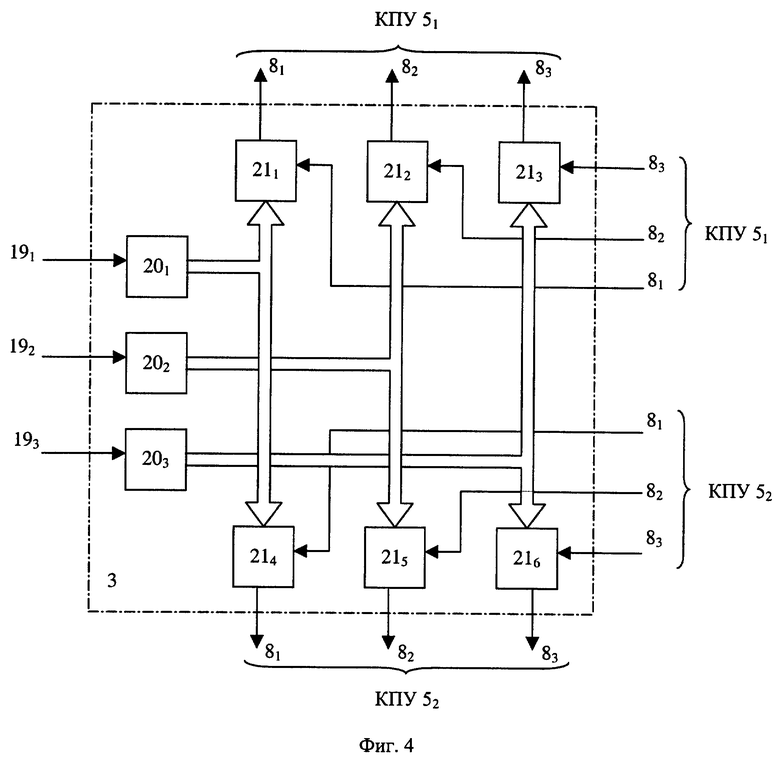
Блок распределения законов коррекции передаточных чисел содержит первый-третий аналого-цифровые преобразователи (АЦП) и первый-шестой цифроаналоговые преобразователи (ЦАП), при этом первым входом блока является вход первого АЦП, выход которого соединен с первыми входами первого и четвертого ЦАП, причем второй вход первого ЦАП является четвертым входом блока, а выход - первым выходом блока, второй вход четвертого ЦАП является седьмым входом блока, а выход - четвертым выходом блока; вторым входом блока является вход второго АЦП, выход которого соединен с первым входом второго и пятого ЦАП, причем второй вход второго ЦАП является пятым входом блока, а выход - вторым выходом блока, второй вход пятого ЦАП является восьмым входом блока, а выход - шестым выходом блока; третьим входом блока является вход третьего АЦП, выход которого соединен с первым входом третьего и шестого АЦП, причем второй вход третьего АЦП является шестым входом блока, а выход - третьим выходом блока, второй вход шестого АЦП является девятым входом блока, а выход - шестым выходом блока.
Блок формирования сигналов управления приводами рулей ракеты содержит первый и второй фильтры подавления изгибных колебаний корпуса ракеты, первый-четвертый усилители, при этом первым входом блока является вход первого фильтра, к первому и второму выходам которого подключены соответственно первый и второй усилители, выходы которых связаны с приводами соответственно первого и третьего рулей ракеты; вторым входом блока является вход второго фильтра, к первому и второму выходам которого подключены соответственно третий и четвертый усилители, выходы которых связаны с приводами соответственно второго и четвертого рулей ракеты.
Причинно-следственные связи между признаками изобретения и техническим результатом заключаются в следующем. Для обеспечения стабильности динамических характеристик контура стабилизации необходимо передаточные числа корректировать обратно пропорционально величине скоростного напора, диапазон изменения которого является наиболее значимым по сравнению с другими параметрами - скоростью и высотой полета ракеты. Однако непосредственное измерение скоростного напора невозможно из-за высоких температур нагрева наружной обшивки корпуса ракеты. Известно [2], что продольное ускорение WX ракеты на пассивном (основном) участке полета может быть рассчитано по формуле:
где CХ - коэффициент лобового сопротивления;
q - скоростной напор;
S - площадь миделевого сечения ракеты;
m - масса ракеты без топлива.
Из этого выражения следует, что с точностью до величин аэродинамических констант ракеты (S, m, CX=2...2,5) ее продольное ускорение WX прямо пропорционально скоростному напору q. Введение датчика продольной перегрузки и второго интегратора, обеспечивает получение как сигнала, эквивалентного скорости полета ЗУР, так и сигнала, пропорционального величине продольного ускорения и, соответственно, скоростному напору.
Изобретение поясняется чертежами, на которых представлены: фиг.1 - структурная схема заявленного автопилота; фиг.2 - структурная схема блока приема первичной полетной информации; фиг.3 - структурная схема блока формирования законов коррекции передаточных чисел; фиг.4 - структурная схема блока распределения законов коррекции передаточных чисел; фиг.5 - структурная схема блока формирования сигналов управления приводами рулей ракеты; фиг.6 - форма закона коррекции передаточного числа; фиг.7 - структурная схема, поясняющая принцип формирования законов коррекции передаточных чисел.
Автопилот для ЗУР, стабилизированной по крену (фиг.1), содержит блок 1 приема первичной полетной информации, блок 2 формирования законов коррекции передаточных чисел, блок 3 распределения законов коррекции передаточных чисел, блок 4 формирования сигналов управления приводами рулей ракеты и два идентичных по структуре канала поперечного управления (КПУ) 5. Каждый из КПУ 5 содержит последовательно включенные датчик поперечной перегрузки 6, блок сравнения 7, первый усилитель коррекции 81 первый сумматор 91, первый интегратор 101 и второй сумматор 92; датчик угловой скорости 11, к выходу которого подключены первые входы второго 82 и третьего 83 усилителей коррекции, причем выход второго усилителя коррекции 82 соединен со вторым входом первого сумматора 91, а выход третьего усилителя коррекции 83 - со вторым входом второго сумматора 92. Первый и второй выходы блока 1 приема первичной полетной информации подключены ко второму входу блока сравнения 7 соответственно первого 51 и второго 52 КПУ, а второй и третий выходы блока 1 - к первому и второму входам блока 2 формирования законов коррекции передаточных чисел, первый-третий выходы которого соединены соответственно с первым-третьим входами блока 3 распределения законов коррекции передаточных чисел, четвертый, пятый и шестой входы которого соединены с выходом соответственно первого 81, второго 82 и третьего 83 усилителей коррекции первого КПУ 51, а седьмой, восьмой и девятый входы - с выходом соответственно первого 81, второго 82 и третьего 83 усилителей коррекции второго КПУ 52. Первый, второй и третий выходы блока 3 распределения законов коррекции передаточных чисел подключены ко вторым входам соответственно первого 81, второго 82 и третьего 83 усилителей коррекции первого КПУ 51, а четвертый, пятый и шестой выходы - ко вторым входам соответственно первого 81, второго 82 и третьего 83 усилителей коррекции второго КПУ 52.
Выход второго сумматора 92 первого КПУ 51 соединен с первым входом блока 4 формирования сигналов управления приводами рулей ракеты, ко второму входу которого подключен выход второго сумматора 92 второго КПУ 52. Входом автопилота являются первый и второй входы 12 блока 1 приема первичной полетной информации, связанные с системой наведения ЗУР, а выходом - первый, второй, третий и четвертый выходы 13 блока 4 формирования сигналов управления приводами рулей ракеты, причем первый и второй выходы связаны с приводом соответственно первого и третьего, а третий и четвертый выходы - с приводом соответственно второго и четвертого рулей симметричной ракеты.
Блок 1 приема первичной полетной информации (фиг.2) содержит последовательно включенные первый регистр 141 и первый преобразователь КОД-АНАЛОГ 151, выход которого является первым выходом блока, который подключен ко второму входу блока сравнения 7 первого КПУ 51; последовательно включенные второй регистр 142 и второй преобразователь КОД-АНАЛОГ 152, выход которого является вторым выходом блока, который подключен ко второму входу блока сравнения 7 второго КПУ 52; последовательно включенные датчик продольной перегрузки 16 ракеты и второй интегратор 102, выход которого является третьим выходом блока. Кроме того, выход датчика продольной перегрузки 16 также выведен в качестве четвертого выхода блока. Входы первого 141 и второго 142 регистров, являющиеся входами блока и, соответственно, автопилота, связаны с системой наведения ЗУР.
Блок 2 формирования законов коррекции передаточных чисел (фиг.3) содержит коммутатор 17, переключатель 18, первый 191, второй 192 и третий 193 формирователи сигналов коррекции. Первый вход коммутатора 17 является первым входом блока и подключен к третьему выходу блока 1 (выходу второго интегратора 102), второй вход коммутатора 17 и вход переключателя 18 объединены и являются вторым входом блока, который подключен к четвертому выходу блока 1 (выходу датчика продольной перегрузки 16). Выход переключателя 18 соединен с третьим входом коммутатора 17, к выходу которого подключены входы первого 191, второго 192 и третьего 193 формирователей сигналов коррекции, выходы которых являются соответственно первым, вторым и третьим выходами блока.
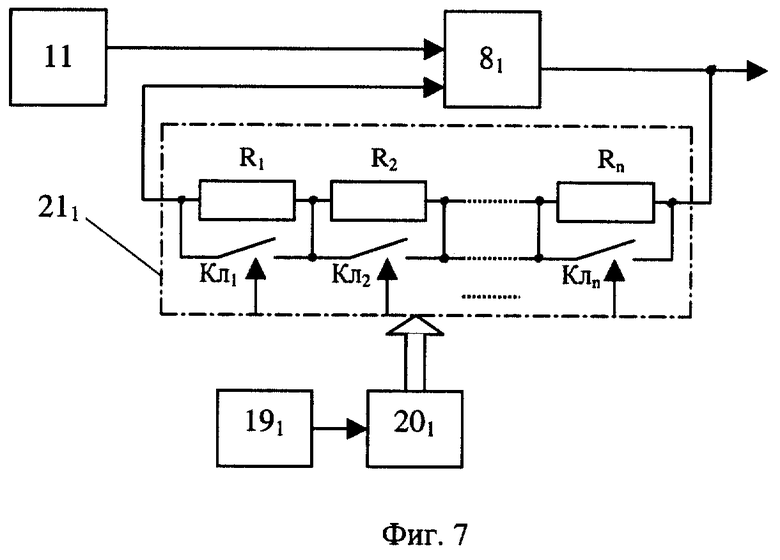
Блок 3 распределения законов коррекции передаточных чисел (фиг.4) содержит первый 201, второй 202 и третий 203 АЦП, первый 211, второй 212, третий 213, четвертый 214, пятый 215 и шестой 216 ЦАП. Первым входом блока 3, подключенным к выходу первого формирователя сигналов коррекции 191 блока 2, является вход первого АЦП 201, выход которого соединен с первыми входами первого 211 и четвертого 214 ЦАП. При этом второй вход первого ЦАП 211 является четвертым входом блока, подключенным к выходу первого усилителя коррекции 81 первого КПУ 51, а выход - первым выходом блока, подключенным ко второму входу этого же усилителя коррекции; второй вход четвертого ЦАП 214 является седьмым входом блока, подключенным к выходу первого усилителя коррекции 81 второго КПУ 52, а выход - четвертым выходом блока, подключенным ко второму входу этого же усилителя коррекции. Вторым входом блока 3, подключенным к выходу второго формирователя сигналов коррекции 192 блока 2, является вход второго АЦП 202, выход которого соединен с первым входом второго 212 и пятого 215 ЦАП. При этом второй вход второго ЦАП 212 является пятым входом блока, подключенным к выходу второго усилителя коррекции 82 первого КПУ 51, а выход - вторым выходом блока, подключенным ко второму входу этого же усилителя коррекции; второй вход пятого ЦАП 215 является восьмым входом блока, подключенным к выходу второго усилителя коррекции 82 второго КПУ 52, а выход - шестым выходом блока, подключенным ко второму входу этого же усилителя коррекции. Третьим входом блока 3, подключенным к выходу третьего формирователя сигналов коррекции 193 блока 2, является вход третьего АЦП 203, выход которого соединен с первым входом третьего 213 и шестого 216 АЦП. При этом второй вход третьего АЦП 216 является шестым входом блока, подключенным к выходу третьего усилителя коррекции 83 первого КПУ 52, а выход - третьим выходом блока, подключенным ко второму входу этого же усилителя коррекции; второй вход шестого АЦП 216 является девятым входом блока, подключенным к выходу третьего усилителя коррекции 83 второго КПУ 52, а выход - шестым выходом блока, подключенным ко второму входу этого же усилителя коррекции. Все АЦП 20(1-3) выполнены с одним входом и n-канальным выходом. Все ЦАП 21(1-6) выполнены по известной схеме [4] с n-канальным входом и одним выходом в виде набора последовательно включенных резисторов R(1-n), параллельно которым включены электронные ключи Кл(1-n) (фиг.7). Вход и выход набора резисторов подключены, соответственно, к выходу и второму входу соответствующего усилителя коррекции 8, а электронные ключи связаны с n-канальным выходом соответствующего АЦП 20.
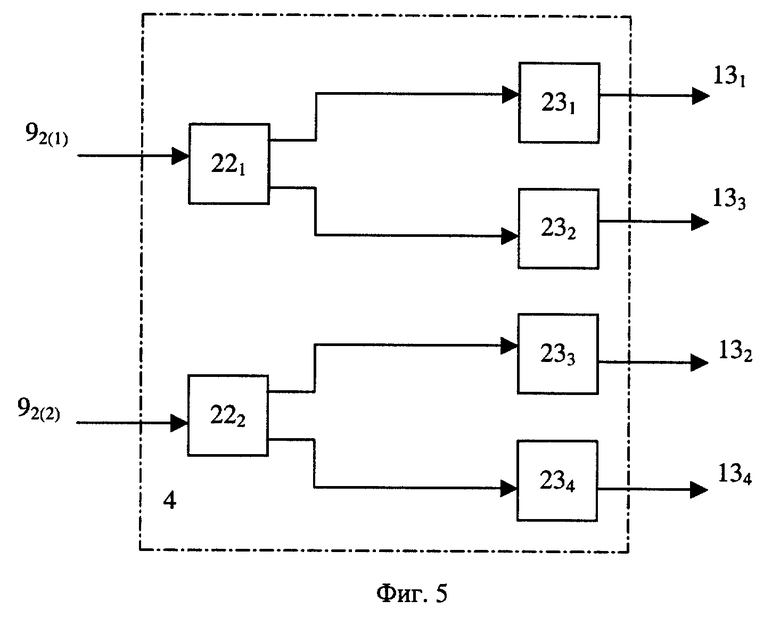
Блок 4 формирования сигналов управления приводами рулей ракеты (фиг.5) содержит первый 221 и второй 222 фильтры подавления изгибных колебаний корпуса ракеты, первый 231, второй 232, третий 233 и четвертый 234 усилители. Первым входом блока является вход первого фильтра 221, подключенный к выходу второго сумматора 92 первого ПКУ 51, вторым входом блока является вход второго фильтра 222, который подключен к выходу второго сумматора 92 второго ПКУ 52. Первый и второй выходы первого фильтра 221 соединены с входами соответственно первого 231 и второго 232 усилителей, выходы которых (131 и 133) связаны с приводами соответственно первого и третьего рулей ракеты. Первый и второй выходы второго фильтра 222 соединены с входами соответственно третьего 233 и четвертого 234 усилителей, выходы которых (132 и 134) связаны с приводами соответственно второго и четвертого рулей ракеты.
Описанные блоки выполнены по известным правилам на типовых элементах цифровой техники. В частности, в блоке 2 формирования законов коррекции передаточных чисел коммутатор 17 может быть выполнен, например, в виде двух электронных ключей с объединенным выходом; в качестве переключателя 18 может быть использован компаратор, ко второму входу которого подключен источник порогового напряжения; в качестве формирователей сигналов коррекции 191-193 могут быть использованы операционные усилители, ко вторым входам которых подключены источники стабилизированных опорных напряжений. В блоке 4 формирования сигналов управления приводами рулей ракеты фильтры 221, 222 подавления изгибных колебаний корпуса ракеты выполнены в виде операционного усилителя с RC обратной связью.
Автопилот для ЗУР, стабилизированной по крену, работает следующим образом. В течение всего пассивного участка управляемого полета ракеты на входы первого 141 и второго 142 регистров блока 1 приема первичной полетной информации (фиг.1, фиг.2) по радиолинии из системы управления ЗУР подаются сигналы в виде кодов, определяющих для первого КПУ 51 и второго КПУ 52 значения команд управления в двух взаимно перпендикулярных плоскостях. Эти сигналы преобразуются в аналоговую форму (при помощи преобразователей 151, 152) и подаются на второй вход блока сравнения 7, соответствующего КПУ 5, на первый вход которого поступают инвертированные сигналы с выхода датчика поперечной перегрузки 6, пропорциональные ускорениям ракеты в данной поперечной плоскости. На выходе блока сравнения 7 формируются сигналы ошибки, которые поступают на первый вход первого усилителя коррекции 81, а с его выхода - через первый сумматор 91 и первый интегратор 101 - на первый вход второго сумматора 92. Сигналы, пропорциональные угловой скорости ракеты, с выхода датчика угловой скорости 11 в каждом КПУ 5 поступают на первый вход второго 82 и третьего 83 усилителей коррекции, при этом выходной сигнал третьего усилителя коррекции 83 подается на второй вход второго сумматора 92, а выходной сигнал второго усилителя коррекции 82 подается на первый вход второго сумматора 92, через первый сумматор 91 и первый интегратор 101. Сигналы ошибки с выхода второго сумматора 92 первого КПУ 51 и с выхода второго сумматора 92 второго КПУ 51 подаются соответственно на первый и второй входы блока 4 формирования сигналов управления приводами рулей ракеты (фиг.5). С помощью фильтров 221, 222 подавляются высокочастотные составляющие выходных сигналов датчиков угловой скорости 11, которые реагируют на изгибные колебания корпуса ракеты в диапазоне 20-80 Гц. Выходные сигналы фильтров 221, 222 усиливаются мощными усилителями, соответственно, 231, 233 и 232, 234 и подаются на соответствующие входные устройства четырех приводов, связанных механически с аэродинамическими рулями ракеты.
Для обеспечения заданных динамических характеристик системы стабилизации ЗУР, в каждом КПУ 5 осуществляется коррекция трех передаточных чисел К автопилота - по интегралу от сигнала ошибки (поперечному ускорению), по интегралу от угловой скорости и по угловой скорости. Эти передаточные числа определяются формулами:
 - для обратной связи по интегралу от сигнала ошибки (поперечному ускорению);
- для обратной связи по интегралу от сигнала ошибки (поперечному ускорению);
 - для обратной связи по интегралу от угловой скорости;
- для обратной связи по интегралу от угловой скорости;
 - для обратной связи по угловой скорости,
- для обратной связи по угловой скорости,
где  ,
,  ,
,  - константы, величины которых определяется соотношениями сопротивлений во входных цепях, цепях обратных связей усилителей коррекции 81, 82, 83 и других элементах устройства;
- константы, величины которых определяется соотношениями сопротивлений во входных цепях, цепях обратных связей усилителей коррекции 81, 82, 83 и других элементах устройства;
 ,
,  ,
,  - законы коррекции передаточных чисел.
- законы коррекции передаточных чисел.
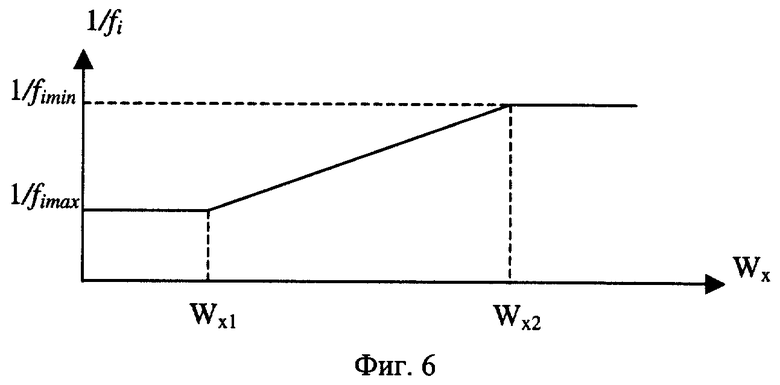
Источниками информации для коррекции передаточных чисел являются измеряемый датчиком продольной перегрузки 16 сигнал, пропорциональный продольному ускорению ракеты Wx, и выходной сигнал второго интегратора 102, пропорциональный интегралу от продольного ускорения Wx, в блоке 1 приема первичной полетной информации (фиг.2), которые поступают соответственно на второй и первый входы блока 2 формирования законов коррекции передаточных чисел (фиг.3). На активном участке полета ЗУР с включенным двигателем аргументом законов коррекции передаточных чисел автопилота является выходной сигнал  второго интегратора 102, который поступает на первый вход коммутатора 17 и с его выхода - на входы первого 191, второго 192 и третьего 193 формирователей аналоговых сигналов коррекции по текущей скорости полета ракеты. На пассивном участке полета с выключенным двигателем аргументом коррекции является выходной сигнал Wx датчика продольной перегрузки 16, который поступает на второй вход коммутатора 17 и вход переключателя 18. Этот сигнал проходит на выход коммутатора 17 и далее на формирователи сигналов коррекции 191-193 только при наличии разрешающего сигнала, поступающего на третий вход коммутатора 17 с выхода переключателя 18 при изменении знака продольной перегрузки. Значения аналоговых сигналов коррекции и моменты их появления на выходах формирователей 191-193 задаются путем сравнения величин стабилизированных опорных напряжений с напряжениями, поступающими с выхода второго интегратора 102 или датчика продольной перегрузки 16. Законы коррекции передаточных чисел ракетного автопилота обычно имеют вид равнобочной гиперболы и реализуются в виде линейной функции изменения аргумента коррекции [3]. В заявленном автопилоте законы коррекции передаточных чисел (fi) реализуются в виде линейной функции изменения коэффициентов усиления операционных усилителей коррекции 81-83 по цепям обратных связей и характер изменения законов коррекции
второго интегратора 102, который поступает на первый вход коммутатора 17 и с его выхода - на входы первого 191, второго 192 и третьего 193 формирователей аналоговых сигналов коррекции по текущей скорости полета ракеты. На пассивном участке полета с выключенным двигателем аргументом коррекции является выходной сигнал Wx датчика продольной перегрузки 16, который поступает на второй вход коммутатора 17 и вход переключателя 18. Этот сигнал проходит на выход коммутатора 17 и далее на формирователи сигналов коррекции 191-193 только при наличии разрешающего сигнала, поступающего на третий вход коммутатора 17 с выхода переключателя 18 при изменении знака продольной перегрузки. Значения аналоговых сигналов коррекции и моменты их появления на выходах формирователей 191-193 задаются путем сравнения величин стабилизированных опорных напряжений с напряжениями, поступающими с выхода второго интегратора 102 или датчика продольной перегрузки 16. Законы коррекции передаточных чисел ракетного автопилота обычно имеют вид равнобочной гиперболы и реализуются в виде линейной функции изменения аргумента коррекции [3]. В заявленном автопилоте законы коррекции передаточных чисел (fi) реализуются в виде линейной функции изменения коэффициентов усиления операционных усилителей коррекции 81-83 по цепям обратных связей и характер изменения законов коррекции  ,
,  ,
,  одинаков (фиг.6). При этом значения fimax и fimin являются постоянными, а значению fimax соответствует минимальное значение продольного ускорения Wx1, значению fimin - максимальное значение Wx2, которые определяются на этапе формирования и проектирования системы стабилизации ракеты. Далее в блоке 3 распределения законов коррекции передаточных чисел (фиг.4) аналоговые сигналы коррекции преобразуются в цифровые двоичные коды и распределяются между первым и вторым КПУ 5. В первом 211, втором 212 и третьем 213 ЦАП цифровые сигналы коррекции преобразуются в аналоговые, смешиваются с выходными аналоговыми сигналами соответственно первого 81, второго 82 и третьего 83 усилителей коррекции первого КПУ 51 и подаются на вторые входы этих же усилителей, образуя обратные связи соответственно по интегралу от сигнала ошибки (поперечному ускорению в данной плоскости), по интегралу от угловой скорости, по угловой скорости ракеты. Аналогично, в четвертом 214, пятом 215 и шестом 216 ЦАП цифровые сигналы коррекции преобразуются в аналоговые, смешиваются с выходными аналоговыми сигналами соответственно первого 81, второго 82 и третьего 83 усилителей коррекции второго КПУ 52 и подаются на вторые входы этих же усилителей, образуя обратные связи соответственно по интегралу от сигнала ошибки (поперечному ускорению в данной плоскости), по интегралу от угловой скорости, по угловой скорости ракеты.
одинаков (фиг.6). При этом значения fimax и fimin являются постоянными, а значению fimax соответствует минимальное значение продольного ускорения Wx1, значению fimin - максимальное значение Wx2, которые определяются на этапе формирования и проектирования системы стабилизации ракеты. Далее в блоке 3 распределения законов коррекции передаточных чисел (фиг.4) аналоговые сигналы коррекции преобразуются в цифровые двоичные коды и распределяются между первым и вторым КПУ 5. В первом 211, втором 212 и третьем 213 ЦАП цифровые сигналы коррекции преобразуются в аналоговые, смешиваются с выходными аналоговыми сигналами соответственно первого 81, второго 82 и третьего 83 усилителей коррекции первого КПУ 51 и подаются на вторые входы этих же усилителей, образуя обратные связи соответственно по интегралу от сигнала ошибки (поперечному ускорению в данной плоскости), по интегралу от угловой скорости, по угловой скорости ракеты. Аналогично, в четвертом 214, пятом 215 и шестом 216 ЦАП цифровые сигналы коррекции преобразуются в аналоговые, смешиваются с выходными аналоговыми сигналами соответственно первого 81, второго 82 и третьего 83 усилителей коррекции второго КПУ 52 и подаются на вторые входы этих же усилителей, образуя обратные связи соответственно по интегралу от сигнала ошибки (поперечному ускорению в данной плоскости), по интегралу от угловой скорости, по угловой скорости ракеты.
Коррекция передаточных чисел автопилота осуществляется одинаково для всех трех обратных связей в каждом КПУ и иллюстрируется на примере регулировки передаточного числа  для обратной связи по угловой скорости (фиг.7). Усилитель коррекции 81, на вход которого от датчика 11 подается аналоговый сигнал, пропорциональный угловой скорости ракеты, охвачен отрицательной обратной связью через ЦАП 211, в котором электронные ключи Кл(1-n) управляются n-разрядным цифровым кодом с выхода АЦП 201, соответствующим аналоговому сигналу коррекции, поступающему на вход АЦП 201 от формирователя сигнала коррекции 191. В результате коммутации резисторов R(1-n) изменяется сопротивление цепи обратной связи усилителя коррекции 81 и, соответственно, усиление в прямой цепи оказывается пропорциональным заданному закону коррекции
для обратной связи по угловой скорости (фиг.7). Усилитель коррекции 81, на вход которого от датчика 11 подается аналоговый сигнал, пропорциональный угловой скорости ракеты, охвачен отрицательной обратной связью через ЦАП 211, в котором электронные ключи Кл(1-n) управляются n-разрядным цифровым кодом с выхода АЦП 201, соответствующим аналоговому сигналу коррекции, поступающему на вход АЦП 201 от формирователя сигнала коррекции 191. В результате коммутации резисторов R(1-n) изменяется сопротивление цепи обратной связи усилителя коррекции 81 и, соответственно, усиление в прямой цепи оказывается пропорциональным заданному закону коррекции  .
.
Источники информации
1. RU 2085443, В 64 С 13/18, 1997.
2. Проектирование зенитных управляемых ракет. Под ред. И.С.Голубева и B.C.Светлова. М.: изд. МАИ, 1999.
3. И.Н.Бронштейн, К.А.Семендяев. Справочник по математике. М.: Гос. изд-во технико-теоретической литературы, 1962, стр.210, рис.189.
4. У.Титце, К.Шенк. Полупроводниковая схемотехника. М.: Мир, 1982, стр.445, рис.243.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| ВЫЧИСЛИТЕЛЬ КОРРЕКТИРУЮЩИХ ФУНКЦИЙ | 2002 |
|
RU2225992C2 |
| АРИФМЕТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ БЫСТРОГО ПРЕОБРАЗОВАНИЯ ХАРТЛИ-ФУРЬЕ | 1999 |
|
RU2190874C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
Изобретение относится к управлению летательными аппаратами, в частности к устройствам управления зенитными управляемыми ракетами (ЗУР) симметричной аэродинамической компоновки, стабилизированными по крену. Автопилот включает в себя два идентичных по структуре канала поперечного управления (КПУ), выходы которых подключены к блоку формирования сигналов управления приводами рулей ракеты, последовательно соединенные блок приема первичной полетной информации, блок формирования законов коррекции передаточных чисел, блок распределения законов коррекции передаточных чисел. Каждый из КПУ содержит последовательно включенные датчик поперечной перегрузки, блок сравнения, первый усилитель коррекции, первый сумматор, первый интегратор и второй сумматор, выход которого является выходом КПУ, а также датчик угловой скорости, к выходу которого подключены второй и третий усилители коррекции, выход которого подключен ко второму входу второго сумматора. Выходы блока приема первичной полетной информации также связаны с блоком сравнения каждого из КПУ, а усилители коррекции каждого КПУ охвачены отрицательными обратными связями через элементы блока распределения законов коррекции передаточных чисел автопилота. Технический результат - расширение функциональных возможностей автопилота симметричной ЗУР, стабилизированной по крену. 4 з.п. ф-лы, 7 ил.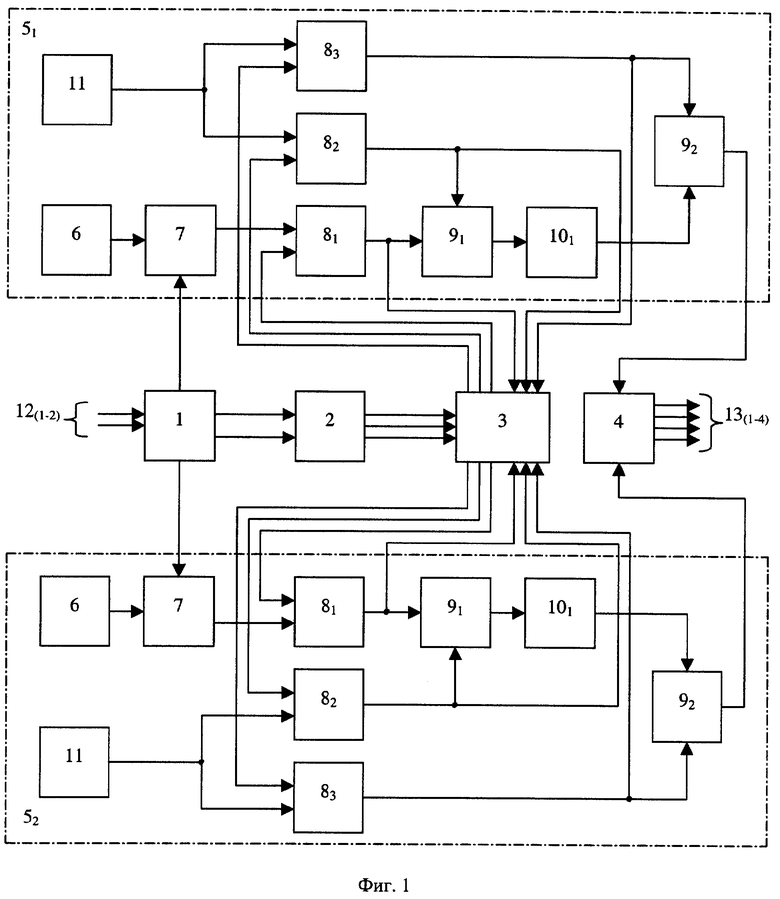
| ГОЛУБЕВ И.С., СВЕТЛОВА В.С | |||
| - Проектирование зенитных управляемых ракет | |||
| - М.: МАИ, 1999 | |||
| ВЕРШИШЕВ Ю.Х | |||
| Основы управления ракетами | |||
| ВИМО СССР, 1968 | |||
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ РАКЕТЫ, СТАБИЛИЗИРОВАННОЙ ПО КРЕНУ | 1982 |
|
RU2085443C1 |
| УСТРОЙСТВО ДЛЯ ОХЛАЖДЕНИЯ КАМЕРЫ | 1996 |
|
RU2102660C1 |

