Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и ориентирования наземных подвижных объектов.
Известно применение на наземных подвижных объектах одометрических навигационных систем, в общем случае состоящих из гироскопического измерителя, электромеханического датчика пути и координатора или электронного картографа. Такие навигационные системы, как правило, предназначены для:
- непрерывного автоматического определения и индикации координат и дирекционного угла объекта;
- непрерывного автоматического определения и индикации дирекционного угла объекта на пункт назначения;
- вычисления координат целей по введенным в аппаратуру дальности до цели и углу визирования на цель.
Как правило, циклограмма работы такой навигационной системы включает следующие этапы: начальная выставка (гирокомпасирование) или начальное ориентирование и навигация (работа), заключающаяся в определении местоположения объекта в движении. Варианты исполнения этих этапов могут быть различными. В частности, может быть несколько вариантов выполнения начальной выставки или начального ориентирования в зависимости от условий выполнения выставки и наличия внешней информации о координатах и углах ориентации объекта.
Известен способ определения угловой ориентации (патент РФ №2248004), основанный на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные приемники сигнала, расположенные на объекте так, чтобы они не лежали на одной прямой. Приемниками сигнала являются GPS-приемники, количеством не менее трех. По их показаниям определяют координаты каждого приемника сигнала, на основании которых вычисляют положение векторов, задающих связанную с объектом систему координат.
Одним из недостатков данного способа является необходимость не менее трех разнесенных приемников сигнала, что существенно усложняет систему и увеличивает габариты изделия.
Известна система самоориентирующаяся гироскопическая курсокреноуказания (патент РФ 2316730), обеспечивающая работу в режиме гирокомпаса во время стоянки объекта и гироазимута при движении объекта. Такие системы называют двухрежимными. В начале, после включения, система работает в режиме гирокомпаса при этом по сигналам о величине горизонтальной составляющей угловой скорости вращения Земли с гироскопических чувствительных элементов аналитически рассчитывается исходный азимут объекта. После завершения режима гирокомпаса (определения исходного азимута) система работает в режиме хранения азимута. В этом режиме по информации о разворотах корпуса прибора по курсу определяется азимут (дирекционный угол) подвижного объекта, а также наклоны подвижного объекта и решаются навигационные задачи.
Недостатком известной гироскопической системы является сложность реализации алгоритмов решения задачи определения исходного азимута объекта, требуется значительное время на определение азимута и высокая стоимость аппаратуры.
Известен способ решения навигационных задач, осуществляемый посредством наземной гироскопической навигационной системы для подвижных объектов (патент РФ №2308681), принятый за прототип, основанный на разложении элементарных отрезков пути на две составляющие в прямоугольной системе координат и последующем алгебраическом суммировании этих составляющих с исходными координатами.
Указанная гироскопическая навигационная система выполнена на базе астатического гироскопа с использованием метода счисления пути, в которой реализуется комбинированная навигационная аппаратура, имеющая: автономный (одометрический) режим работы от гирокурсоизмерителя (ГКИ) (гироазимута); режим работы от спутниковой системы навигации (СНС); интегрированный режим работы с коррекцией текущих координат автономного канала по более точной информации спутникового канала, что обеспечивает повышение точности аппаратуры, а применение элементов микропроцессорной техники, использование картографа с цифровой электронной картой местности позволяет расширить функциональные возможности аппаратуры и реализовать обработку сигналов по дополнительным алгоритмам для решения дополнительных навигационных задач.
Гироскопическая навигационная система состоит из гирокурсоизмерителя (ГКИ), картографа (вычислителя), электромеханического датчика пути и спутниковой навигационной системы (СНС) в составе приемника и антенны.
Работа с системой при решении навигационных задач включает в себя начальное ориентирование и определение местоположения объекта в движении. Перед начальным ориентированием определяют координаты исходного пункта маршрута Хисх, Yисх. В качестве исходного пункта, как правило, выбирают контурные точки на местности (пункты государственной геодезической сети, памятники, мосты, специальные точки в постоянных парках и т.д.), при отсутствии привязанных контурных точек их координаты определяются по карте или по СНС.
Начальное ориентирование объекта в зависимости от начальных данных может быть выполнено несколькими способами, например определение исходного дирекционного угла αисх по известному ориентирному направлению или с помощью буссоли.
Определение исходного дирекционного угла αисх по известному ориентирному направлению производится в следующей последовательности:
- производят установку объекта на контрольную точку с известными координатами и дирекционным углом на ориентир αор, так чтобы проекция оси вращения визирного устройства совпадала с контрольной точкой с погрешностью не более 0,5 м;
- с помощью визирного устройства необходимо свизироваться на ориентир, дирекционный угол на который известен, и определить угол визирования на ориентир βвиз;
- определяют исходный дирекционный угол продольной оси объекта αисх в соответствии с формулами:
αисх=αop-βвиз
Недостатком данного метода начального ориентирования по известному ориентирному направлению является невозможность его применения в случаях отсутствия объектов с известными координатами и дирекционным углом на ориентир αор или в условиях недостаточной видимости на известный ориентир.
Второй метод определения исходного дирекционного угла с помощью буссоли может применяться при отсутствии ориентиров или в условиях плохой видимости. Определение исходного дирекционного угла продольной оси объекта αисх осуществляется при помощи буссоли ПАБ-2А в следующей последовательности:
- установить объект на исходный пункт;
- установить буссоль на расстоянии не менее 50 м от объекта;
- подготовить буссоль к работе в соответствии с ТО и ИЭ на буссоль;
- свизироваться визирным устройством объекта на центр буссоли и записать угол βвиз;
- свизироваться через монокуляр буссоли на оптический визир объекта;
- записать значение магнитного азимута АМ на оптический визир объекта;
- определить исходный дирекционный угол αисх объекта по формулам:
αисх=30-00+Ам+(П)-βвиз, или
 .
.
Недостатком второго метода начального ориентирования с помощью буссоли является, во-первых, невозможность его применения в условиях недостаточной видимости до 50 м, а также как для первого метода, так и для второго требуется наличие дополнительного оборудования, не входящего в комплект навигационной системы. Выделенные недостатки существенно ограничивают эксплуатационные возможности навигационной системы и снижают мобильность изделия.
Поэтому разработка способа начального ориентирования без дополнительных средств является актуальной проблемой.
Целью изобретения является расширение эксплуатационных возможностей гироскопической навигационной системы для наземных подвижных объектов за счет использования для начального ориентирования параметров спутниковой навигационной системы (СНС), гирокурсоизмерителя (ГКИ) и датчика пути соответственно по определению координат объекта, измерению дирекционного угла и пройденного пути по определенному алгоритму в определенной взаимосвязи.
Поставленная техническая задача решается тем, что в гироскопической навигационной системе для наземных подвижных объектов, состоящей из ГКИ, вычислителя (картографа), датчика пути и спутниковой навигационной системы (СНС) и требующей при решении навигационных задач проведения начального ориентирования, согласно заявляемому изобретению,
способ начального ориентирования осуществляют в следующей последовательности:
(a) определяют местоположение объекта в начальной точке маршрута по информации от СНС;
(b) выполняют движение объекта на короткие расстояния и определяют координаты перемещения движущегося объекта одометрическим каналом относительно исходных данных СНС о местоположении объекта;
(c) объект останавливают;
(d) повторно получают данные СНС о местоположении объекта в месте остановки;
(e) вычисляют векторы направления (дирекционные углы от начальной точки до конечной) пройденного участка по информации, полученной от СНС и автономного (одометрического) каналов;
(f) вычисленные направления векторов используют для определения поправки Δαисх в текущий дирекционный угол объекта;
(g) суммируют полученную поправку с текущим дирекционным углом объекта и используют полученный дирекционный угол в качестве исходного дирекционного угла αисх как параметра начального ориентирования.
Предлагаемый способ начального ориентирования гироскопической навигационной системы для наземных подвижных объектов может быть применен при отсутствии контрольных точек с известными координатами и дирекционными углами на ориентиры, недостатке времени для проведения полного цикла исходного ориентирования, в условиях отсутствия ориентиров и в условиях плохой видимости.
Указанный способ начального ориентирования гироскопической навигационной системы для подвижных объектов позволяет в рамках существующей аппаратной части производить определение дирекционного угла объекта путем совместной обработки координат, определяемых СНС, и одометрическим каналом СТО во время движения объекта с достаточной для навигации точностью.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявляемого технического решения, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности признаков заявляемого способа начального ориентирования гироскопической навигационной системы для подвижных объектов. Это позволяет сделать вывод о соответствии заявляемой системы критерию «новизна».
Сравнение заявляемого способа начального ориентирования гироскопической навигационной системы для подвижных объектов с другими техническими решениями показывает, что отдельные отличительные признаки в технике широко известны. Так известно применение СНС для получения данных о местоположении объекта. Известно применение вычислений дистанции прямолинейного перемещения движущегося объекта относительно последних данных СНС о местоположении для решения навигационных задач. Однако не обнаружено применение указанных признаков в данной взаимосвязи с другими признаками для достижения вышеуказанного технического результата, следовательно, заявляемый способ начального ориентирования гироскопической навигационной системы для подвижных объектов может рассматриваться как соответствующий критерию изобретения «изобретательский уровень».
Изобретение поясняется чертежами, где:
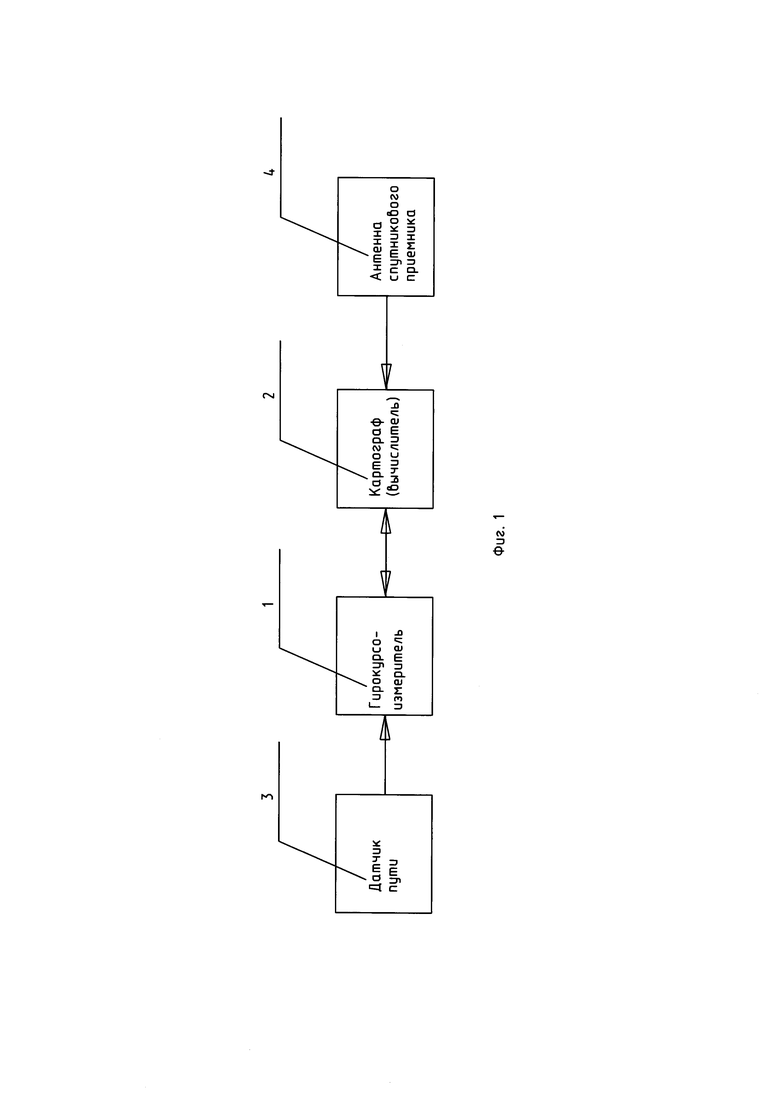
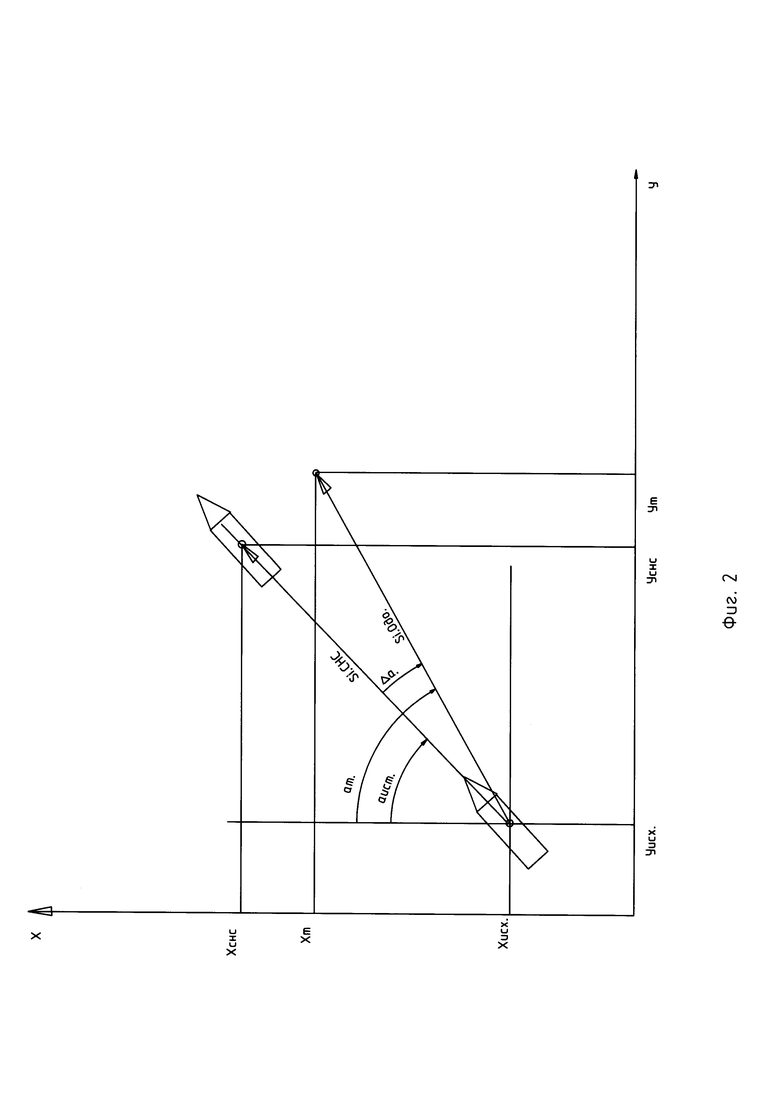
На Фиг. 1 представлена структурная схема гироскопической навигационной системы для подвижных объектов;
на Фиг. 2 представлена схема измерения дирекционного угла в системе Гаусса-Крюгера, которая представляет собой прямоугольную систему координат, ось X которой совпадает с направлением на Север, а ось Y совпадает с направлением на Восток. Дирекционный угол объекта αi в системе координат Гаусса-Крюгера - это угол между проекцией продольной оси объекта на горизонтальную плоскость и осью X.
Практическое применение настоящего способа начального ориентирования гироскопической навигационной системы для наземных подвижных объектов рассмотрим на примере его применения в гироскопической навигационной системе для неземных подвижных объектов (Фиг. 1), состоящей из гироскопического измерителя 1, вычислителя (картографа) 2, датчика пути 3 и СНС, состоящей из антенны 4 и приемника, который условно не показан, встроенного в картограф.
Работа с системой при решении навигационных задач включает в себя начальное ориентирование и определение местоположения объекта в движении. Операцию начального ориентирования осуществляют в следующей последовательности:
- объект устанавливается в любой точке на открытой местности, где нет помех для приема сигналов СНС;
- система включается и по истечении времени готовности одометрического и спутникового каналов переводится в режим «Самориентирования», при этом в одометрический канал вводятся координаты ХИСХСНС, YИСХСНС, определенные спутниковым каналом, которые заносятся в память микроЭВМ;
- далее начинается движение в произвольном направлении на короткие расстояния Si (Фиг. 2), желательно на прямолинейном участке с предельно допустимой для данной местности скоростью;
- при этом производится вычисление координат движущегося объекта относительно исходных (начальных) данных СНС о местоположении, в процессе движения в одометрическом канале производится вычисление координат в соответствии с ранее описанным алгоритмом по введенным в канал исходным координатам и дирекционному углу, установившемуся в процессе данного запуска;
- примерно через 1 км движения объект останавливают и система переводится в одометрический режим. После чего производится совместная обработка координат и дирекционных углов, полученных с одометрического и спутникового каналов в конечной точке по следующему алгоритму:
- вычисляется дирекционный угол αT с начальной точки маршрута на конечную по координатам, определенным одометрическим каналом по формуле:
где ХТ, YT - координаты конечной точки, определенные одометрическим каналом;
ХИСХСНС, YИСХСНС - координаты начальной точки, определенные спутниковым каналом;
- вычисляется дирекционный угол αИСТ с начальной точки маршрута на конечную по координатам, определенным спутниковым каналом по формуле:
где ХТСНС, YTCHC - координаты конечной точки, определенные спутниковым каналом;
- вычисляется ошибка Δαисх в установке исходного дирекционного угла на исходной точке по формуле:

- вычисляется действительное значение текущего дирекционного угла в точке нахождения объекта  согласно выражению:
согласно выражению:

где αm - приборное значение дирекционного угла на конечной точке до коррекции;
- автоматически вводятся значение дирекционного угла и координаты точки места нахождения объекта Хт СНС, Yт СНС в автономный канал аппаратуры.
После введения оператором координат пункта назначения начинают движение к пункту назначения.
В процессе движения объекта происходят изменения дирекционного угла продольной оси объекта, которые измеряются гирокурсоизмерителем 1 и передаются в вычислитель (микроЭВМ) и туда же поступает информация о пройденном пути объекта, измеряемая датчиком пути 3. По полученной информации от ГКИ в микроЭВМ определяются приращения дирекционного угла αi, после чего рассчитывается текущее значение дирекционного угла объекта как сумма исходного дирекционного угла αисх и приращений дирекционного угла αi, полученных за время движения объекта от исходной точки до текущей. По сигналам датчика пути 3, несущим информацию о пройденном объектом пути, по известному алгоритму в микроЭВМ рассчитываются текущие разности координат пункта назначения и объекта. В соответствии с изменившимися значениями разностей координат пункта назначения и объекта в микроЭВМ по соответствующим алгоритмам вычисляется дирекционный угол на пункт назначения от нового местоположения объекта.
Таким образом, на выходе микроЭВМ имеется информация о текущих координатах и дирекционном угле объекта, координатах цели, дирекционном угле на пункт назначения и дальности до него, которая поступает к внешним устройствам обработки информации и управления или на вход картографа 2.
Эффективность предлагаемого технического решения проверена в изделиях «Система топографического ориентирования (СТО) «ТРОНА-1», серийно изготавливаемых в ОАО «Ковровский электромеханический завод». Без использования традиционной информации по координатам привязанных контурных точек и известных ориентирных направлений, без применения дополнительных средств типа буссоли, проведенное начальное ориентирование по предлагаемому способу обеспечило достаточную точность исходных данных, позволивших получить конечные результаты по ошибке определения координат объекта (топопривязчика 1Т134 на базе автомобиля «Урал») на марше продолжительностью 24 км 0,4% от пройденного пути при допустимой погрешности не более 0,9% для колесных объектов. При этом время, затраченное на этап начального ориентирования, не превысило 10 мин, что значительно меньше среднестатистического значения времени начального ориентирования ранее применяемыми способами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентирования мобильных объектов относительно объекта с известным дирекционным углом | 2018 |
|
RU2692945C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| БОЕВАЯ МАШИНА | 2010 |
|
RU2442097C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и ориентирования наземных подвижных объектов. Технический результат - расширение функциональных возможностей. Для этого в гироскопической навигационной системе для наземных подвижных объектов, состоящей из гирокурсоизмерителя (ГКИ), вычислителя (картографа), датчика пути и спутниковой навигационной системы (СНС), исходный дирекционный угол продольной оси объекта αисх определяют по параметрам СНС, ГКИ и датчика пути в следующей последовательности: производят определение координат объекта по СНС в начальной точке маршрута, осуществляют передвижение объекта на короткие расстояния и вычисляют дистанции прямолинейного перемещения движущегося объекта относительно последних данных СНС о местоположении, объект останавливают, повторно получают данные СНС о местоположении объекта в месте остановки, вычисляют вектор дирекционного угла объекта по информации, полученной от спутниковой навигационной системы и автономного (одометрического) каналов, вычисленный вектор используют для определения поправки Δαисх в текущий дирекционный угол объекта, суммируют полученную поправку с текущим дирекционным углом и используют полученный дирекционный угол в качестве исходного дирекционного угла αисх как параметра начального ориентирования. 2 ил.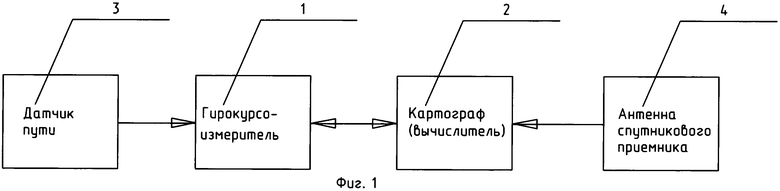
Способ начального ориентирования гироскопической навигационной системы для наземных подвижных объектов, основанный на использовании информации от спутниковой навигационной системы (СНС) GPS и (или) ГЛОНАСС, датчика пройденного пути, гироскопического измерителя угла поворота объекта, отличающийся тем, что для начального ориентирования продольной оси объекта определяют местоположение объекта в начальной точке маршрута по информации от СНС,
выполняют передвижение объекта на короткие расстояния и определяют координаты перемещения движущегося объекта одометрическим каналом относительно исходных данных СНС о местоположении объекта,
объект останавливают,
повторно определяют местоположение объекта в месте остановки по информации от СНС,
вычисляют векторы направления дирекционных углов объекта от начальной до конечной точки по информации, полученной от СНС и автономного (одометрического) каналов,
вычисленные направления векторов используют для определения поправки Δαисх в текущий дирекционный угол объекта,
суммируют полученную поправку с текущим дирекционным углом одометрического канала и используют полученный дирекционный угол в качестве исходного дирекционного угла αисх как параметра начального ориентирования.
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| US 6253151 B1, 26.06.2001 | |||
| JP 2003202803 A, 18.07.2003. | |||

