Предлагаемое изобретение относится к навигационной технике и представляет собой аппаратуру наземной навигации движущегося наземного транспортного средства (ТС).
Известна аппаратура наземной навигации по Патенту на изобретение №2708550 (правообладатель АО «ВНИИ «Сигнал», заявка №2018126276, приоритет от 16.07.2018 г., дата регистрации в Госреестре - 09.12.2019 г.), принятая за прототип, включающая в свой состав путевую систему (ПС), представляющую собой механический датчик скорости (МДС), курсовую систему (КС), представляющую собой самоориентирующуюся систему гиро-курсокреноуказания (ССГККУ), навигационный вычислитель (НВ), выполненный в виде координатора, навигационную аппаратуру потребителя спутниковой навигационной системы (НАП СНС), формирователь «стоянка-ход», блок запоминания угла стоянки, блок определения приращения угла, блок запоминания приращения угла, сумматор и блок коррекции угла, выход которого соединен с третьим входом навигационного вычислителя, а первый вход - с выходом курсовой системы, первыми входами блока запоминания угла стоянки и блока определения приращения угла, выход которого соединен с первым входом блока запоминания приращения угла, а второй вход - с выходом блока запоминания угла стоянки, второй вход которого соединен со вторыми входами блока запоминания приращения угла и сумматора, а также с выходом формирователя "стоянка-ход", первый вход которого соединен с выходом путевой системы; первый вход сумматора соединен с выходом блока запоминания приращения угла, а выход - со вторым входом блока коррекции угла; выход НАП СНС соединен с первым входом НВ, второй вход которого соединен с выходом ПС.
С помощью данной аппаратуры местоположение ТС определяется текущими координатами (Xi, Yi), которые вычисляются в соответствии с выражениями:
Xi=Хн+Σi ΔSi⋅cos (αi+δá*i); (1)
Yi=Yн++Σi ΔSi⋅sin (αi+δá*i); (2)
где: Хн, Yн - начальные координаты в исходной точке маршрута, вводимые оператором в НВ или определяемые путем усреднения показаний НАП СНС в исходной точке;
ΔSi - горизонтальная проекция элементарного приращения пути, вырабатываемого в ПС, в i - ый момент времени;
αi - азимут текущего направления ТС, вырабатываемый в КС в i-й момент времени;
δá*i - накопленная к i-му моменту времени курсовая погрешность из-за случайного дрейфа (ухода) гироскопа из состава КС;
δá - систематическая составляющая скорости дрейфа гироскопа.
Кроме того, в данной аппаратуре при длительных стоянках в промежуточных точках маршрута движения (например, для несения боевого дежурства или проведения разведки) осуществляются вычисления в процессе стоянок ТС накопленной за время стоянок курсовой погрешности из-за дрейфа (ухода) гироскопа из состава КС, и соответствующей коррекцией дирекционного угла.
Недостатком вышеуказанного устройства является низкая точность определения текущего азимута и координат местоположения ТС при длительных стоянках в промежуточных точках маршрута движения, так как КС, представляющая собой гироскопическую систему, имеет свойство накапливать с течением времени ошибку (δá* i) определения истинного азимута текущего направления ТС не только при длительных стоянках, но и в процессе движения.
Изобретение направлено на увеличение точности определения азимута текущего направления ТС и координат его местоположения за счет вычисления - в процессе стоянок ТС не только накопленной за время стоянок курсовой погрешности из-за дрейфа (ухода) гироскопа из состава КС, но и значений систематической составляющей скорости дрейфа (ухода) гироскопа (δá), путем вычисления среднего значения скорости ухода за время стоянки и последующей в процессе движения соответствующей коррекцией дирекционного угла.
Для этого в аппаратуру наземной навигации, содержащую путевую систему, курсовую систему, навигационный вычислитель, навигационную аппаратуру потребителя спутниковой навигационной системы, формирователь «стоянка-ход», блок запоминания угла стоянки, блок определения приращения угла, блок запоминания приращения угла, сумматор и блок коррекции угла, выход которого соединен с третьим входом НВ, а первый вход - с выходом КС, первыми входами блока запоминания угла стоянки и блока определения приращения угла, выход которого соединен с первым входом блока запоминания приращения угла, а второй вход - с выходом блока запоминания угла стоянки, второй вход которого соединен со вторыми входами блока запоминания приращения угла и сумматора, а также с выходом формирователя "стоянка-ход", вход которого соединен с выходом ПС; первый вход сумматора соединен с выходом блока запоминания приращения угла, а выход - со вторым входом блока коррекции угла; выход НАЛ СНС соединен с первым входом НВ, второй вход которого соединен с выходом ПС, дополнительно введены таймер движения, таймер стоянки, сумматор времени движения, сумматор времени стоянки и блок определения систематической составляющей скорости ухода, выход которого соединен с четвертым входом блока коррекции угла, первый вход - с выходом сумматора и вторым входом блока коррекции угла, а второй вход - с выходом сумматора времени стоянки, второй вход которого соединен с выходом таймера стоянки, а первый вход - с выходом формирователя «стоянка-ход», со вторым входом сумматора времени движения, со вторыми входами сумматора, блока запоминания угла стоянки и блока запоминания приращения угла, а также со входами таймера стоянки и таймера движения, выход которого соединен с первым входом сумматора времени движения, выход которого соединен с третьим входом блока коррекции угла.
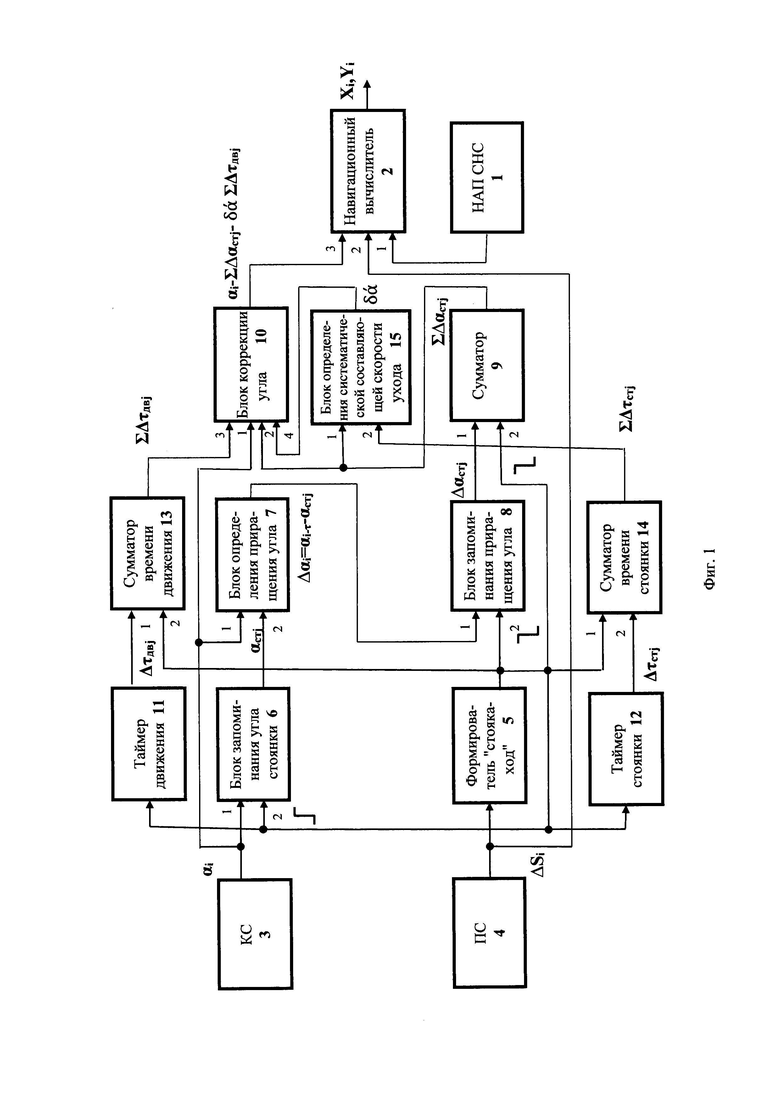
Заявляемая аппаратура наземной навигации (АНН) (фиг. 1), содержит ПС 4, КС 3, НВ 2, НАП СНС 1, формирователь «стоянка-ход» 5, блок запоминания угла стоянки 6, блок определения приращения угла 7, блок запоминания приращения угла 8, сумматор 9 и блок коррекции угла 10, выход которого соединен с третьим входом НВ 2, а первый вход - с выходом КС 3, первыми входами блока запоминания угла стоянки 6 и блока определения приращения угла 7, выход которого соединен с первым входом блока запоминания приращения угла 8, а второй вход - с выходом блока запоминания угла стоянки 6, второй вход которого соединен со вторыми входами блока запоминания приращения угла 8 и сумматора 9, а также с выходом формирователя "стоянка-ход" 5, вход которого соединен с выходом ПС 4; первый вход сумматора 9 соединен с выходом блока запоминания приращения угла 8, а выход - со вторым входом блока коррекции угла 10; выход НАП СНС 1 соединен с первым входом НВ 2, второй вход которого соединен с выходом ПС 4, таймер движения 11, таймер стоянки 12, сумматор времени движения 13, сумматор времени стоянки 14 и блок определения систематической составляющей скорости ухода 15, выход которого соединен с четвертым входом блока коррекции угла 10, первый вход - с выходом сумматора 9 и вторым входом блока коррекции угла 10, а второй вход - с выходом сумматора времени стоянки 14, второй вход которого соединен с выходом таймера стоянки 12, а первый вход - с выходом формирователя «стоянка-ход» 5, со вторым входом сумматора времени движения 13, со вторыми входами сумматора 9, блока запоминания угла стоянки 6 и блока запоминания приращения угла 8, а также со входами таймера стоянки 12 и таймера движения 11, выход которого соединен с первым входом сумматора времени движения 13, выход которого соединен с третьим входом блока коррекции угла 10.
Материалы заявки поясняются графическими материалами, где:
- на Фиг. 1 представлена структурно-функциональная схема заявляемой АНН;
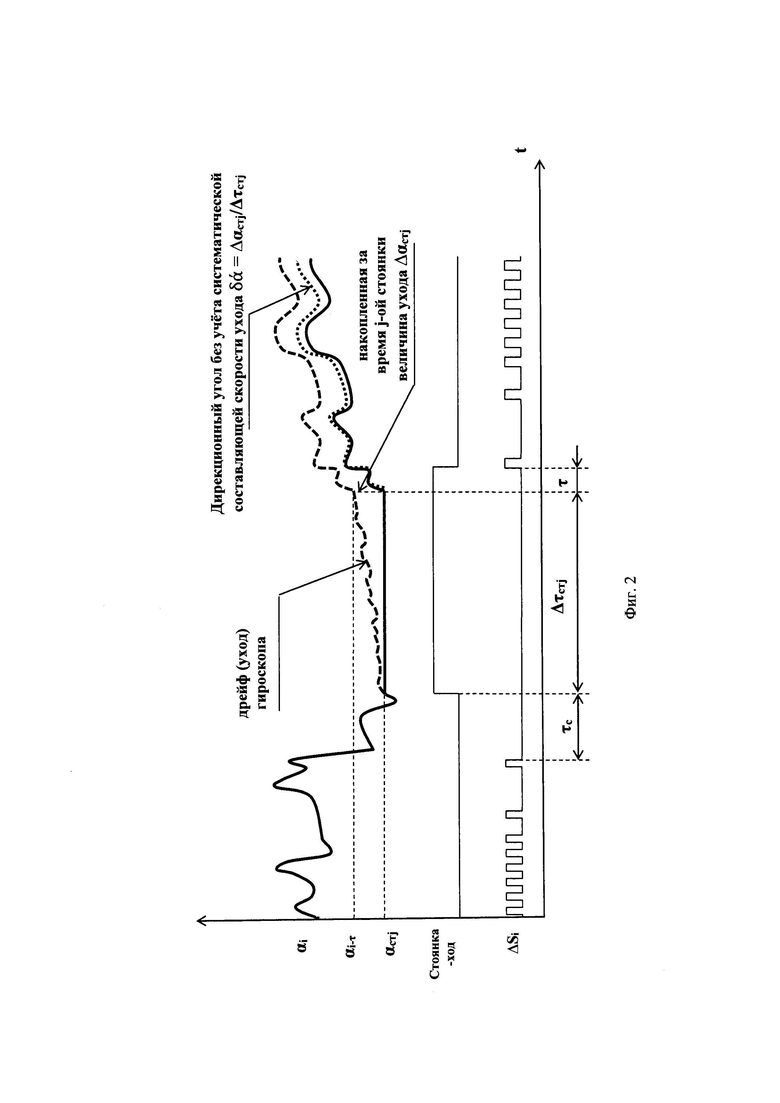
- на Фиг. 2 представлена циклограмма работы АНН.
Заявляемая АНН работает следующим образом.
Перед началом движения ТС с АНН должно встать на исходную точку маршрута, после этого оператор выбирает координаты исходной точки Хн, Yн либо из каталога, либо путем усреднения показаний НАП СНС 1, и вводит их в НВ 2. Кроме того при включении (подачи питания) АНН сигналы на выходах блока запоминания приращения угла 8, сумматора 9, таймера движения 11, таймера стоянки 12, сумматора времени движения 13, сумматора времени стоянки 14 и блока определения систематической составляющей скорости ухода 15 обнуляются.
В НВ 2 в каждый i-й момент времени по сигналам ΔSi с выхода ПС 4 и αi с выхода КС 3 через блок коррекции угла 10, поступающим на второй и третий входы НВ 2 соответственно, определяются текущие координаты местоположения ТС по выражениям (1), (2). Факт стоянки ТС (см. фиг. 2) определяется при отсутствии в течение определенного времени τс импульсов пути ΔSi; с выхода ПС 4 (задержка в формировании факта стоянки τс необходима, т.к. после последнего импульса пути ΔSi с выхода ПС 4 какое-то время ТС продолжает двигаться, при этом возможно изменение его углового положения), при этом на выходе формирователя "стоянка-ход" 5 формируется сигнал, поступающий на вторые входы блока запоминания угла стоянки 6, блока запоминания приращения угла 8 и сумматора 9, причем передний фронт этого сигнала означает начало стоянки, а задний - начало движения ТС. По переднему фронту этого сигнала в блоке запоминания угла стоянки 6 запоминается значение дирекционного угла=αстj (j - номер стоянки), которое с его выхода поступает на второй вход блока определения приращения угла 7, на первый вход которого поступает с выхода КС текущее значение дирекционного угла αi. В процессе текущей стоянки ТС в этом блоке непрерывно определяется приращение угла Δαi=αi - αCTj, что, по сути, является накопленным значением за время стоянки дрейфа (ухода) гироскопа из состава КС.
Одновременно с началом стоянки, также по переднему фронту сигнала с выхода формирователя «стоянка-ход» 5 поступающего на вход таймера стоянки 12 запускается с нуля отсчет времени стоянки ΔτCTj, значение которого с его выхода поступает на второй вход сумматора времени стоянки 14, в котором происходит накопление по заднему фронту сигнала с выхода формирователя «стоянка-ход» 5 поступающего на его первый вход. Значение суммарного времени всех стоянок ΣΔτCTj с выхода сумматора времени стоянки 14 поступает на второй вход блока определения систематической составляющей скорости ухода 15, на первый вход которого с выхода сумматора 9 поступает накопленные за время всех стоянок приращения угла ΣΔαCTj. В данном блоке определяется систематическая составляющая скорости ухода (в соответствии с выражением: δá=ΣΔαCTj/ΣΔτCTj), которая поступает на четвертый вход блока коррекции угла 10.
При начале движения ТС, с приходом первого импульса пути ΔSi с выхода ПС 4 сигнал на выходе формирователя "стоянка-ход" 5 обнуляется, при этом по заднему фронту этого сигнала в блок запоминания приращения угла 8 считывается из блока приращения угла 7 величина приращения угла Δαi=αi-τ-αCTj, определенная ранее на время τ, чем сформировался задний фронт, т.к. начало фактического движения ТС (в т.ч. изменение угла ТС) может начинаться чуть раньше, чем приходит первый импульс пути ΔSi. С выхода блока запоминания приращения угла 8 значение приращения угла ΔαCTj поступает на первый вход сумматора 9, в котором по заднему фронту сигнала с выхода формирователя "стоянка-ход" 5 суммируются накопленное за время всех стоянок приращение угла ΣΔαCTj, которое поступает на второй вход блока коррекции угла 10.
Одновременно с началом движения, по заднему фронту сигнала с выхода формирователя «стоянка-ход» 5 поступающего на вход таймера движения 11 запускается с нуля отсчет времени движения Δτдвj, значение которого с его выхода поступает на первый вход сумматора времени движения 13, в котором происходит накопление по переднему фронту сигнала с выхода формирователя «стоянка-ход» 5 поступающего на его второй вход. Значение суммарного времени движения ∑Δτдвj с выхода сумматора времени движения 13 поступает на третий вход блока коррекции угла 10, с выхода которого поступает значение дирекционного угла за вычетом накопленных за время всех стоянок приращений угла (суммарного дрейфа) и накопленного дрейфа из-за систематической составляющей скорости ухода в процессе движения αi-∑ΔαCTj-δá∑Δτдвj поступающее на третий вход навигационного вычислителя 2.
Формирователь «стоянка-ход», блоки запоминания угла стоянки, определения приращения угла, запоминания приращения угла, коррекции угла и блока определения систематической составляющей скорости ухода могут быть реализованы на основе микроконтроллеров, а связи между ними реализованы по стандартным интерфейсам обмена информацией, типа RS-232.
Таким образом, задача навигации по выражениям (1), (2) для ТС решается с учетом определения при длительных стоянках систематической составляющей скорости ухода и компенсации погрешности в процессе движения, что увеличивает точность (по сравнению с прототипом) определения АНН азимута текущего направления ТС и координат его местоположения на 5-10%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| Телематический прибор | 2019 |
|
RU2736321C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2234044C2 |
Изобретение относится к навигационной технике и представляет собой аппаратуру наземной навигации движущегося наземного транспортного средства (ТС). Изобретение направлено на увеличение точности определения азимута текущего направления ТС и координат его местоположения за счет вычисления в процессе стоянок ТС не только накопленной за время стоянок курсовой погрешности из-за дрейфа гироскопа из состава курсовой системы, но и значений систематической составляющей скорости дрейфа гироскопа путем вычисления среднего значения скорости ухода за время стоянки и последующей в процессе движения соответствующей коррекцией дирекционного угла. Это достигается путем введения в аппаратуру наземной навигации таймера движения, таймера стоянки, сумматора времени движения, сумматора времени стоянки и блока определения систематической составляющей скорости ухода. 2 ил.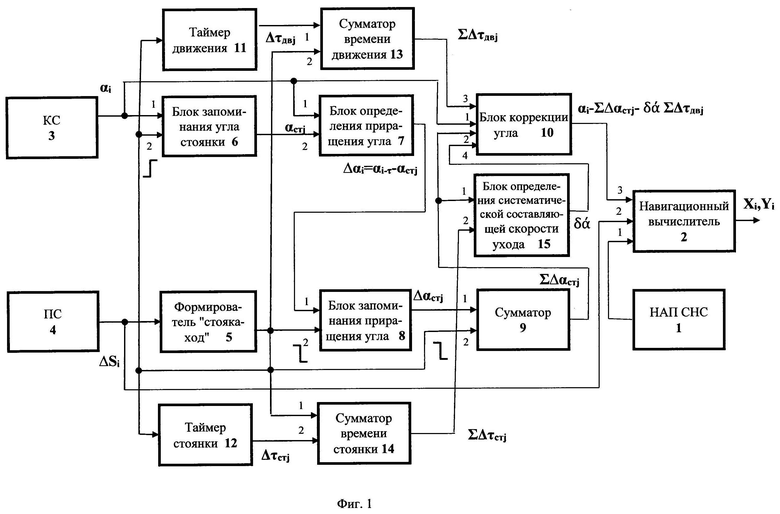
Аппаратура наземной навигации, включающая в свой состав путевую систему, курсовую систему, навигационный вычислитель, навигационную аппаратуру потребителя спутниковой навигационной системы, формирователь «стоянка-ход», блок запоминания угла стоянки, блок определения приращения угла, блок запоминания приращения угла, сумматор и блок коррекции угла, выход которого соединен с третьим входом навигационного вычислителя, а первый вход - с выходом курсовой системы, первыми входами блока запоминания угла стоянки и блока определения приращения угла, выход которого соединен с первым входом блока запоминания приращения угла, а второй вход - с выходом блока запоминания угла стоянки, второй вход которого соединен со вторыми входами блока запоминания приращения угла и сумматора, а также с выходом формирователя "стоянка-ход", вход которого соединен с выходом путевой системы; первый вход сумматора соединен с выходом блока запоминания приращения угла, а выход - со вторым входом блока коррекции угла; выход навигационной аппаратуры потребителя спутниковой навигационной системы соединен с первым входом навигационного вычислителя, второй вход которого соединен с выходом путевой системы, отличающаяся тем, что в нее введены таймер движения, таймер стоянки, сумматор времени движения, сумматор времени стоянки и блок определения систематической составляющей скорости ухода, выход которого соединен с четвертым входом блока коррекции угла, первый вход - с выходом сумматора и вторым входом блока коррекции угла, а второй вход - с выходом сумматора времени стоянки, второй вход которого соединен с выходом таймера стоянки, а первый вход - с выходом формирователя «стоянка-ход», со вторым входом сумматора времени движения, со вторыми входами сумматора, блока запоминания угла стоянки и блока запоминания приращения угла, а также со входами таймера стоянки и таймера движения, выход которого соединен с первым входом сумматора времени движения, выход которого соединен с третьим входом блока коррекции угла.
| Аппаратура наземной навигации | 2018 |
|
RU2708550C1 |
| БЕСПЛАТФОРМЕННАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2014 |
|
RU2581743C1 |
| Машина для испытания рельсов и стыковых рельсовых накладок на износ и усталостную прочность | 1952 |
|
SU100232A1 |
| Способ изготовления печатных форм с набора | 1932 |
|
SU33815A1 |
| EP 3775992 B1, 05.07.2023 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |

