Изобретение относится к измерительной технике, а именно к способам измерения свободного хода рулевого колеса (суммарного люфта рулевого управления) автотранспортных средств. Преимущественно может применяться при диагностировании автомобилей и оценке технического состояния рулевого управления при государственном техническом осмотре.
Известен способ определения суммарного люфта рулевого управления автотранспортных средств при приложении к рулевому колесу нормированного усилия, при повороте рулевого колеса поочередно в обоих направлениях, реализованный в люфтомере К-524 [Люфтомер рулевого управления К-524. Паспорт К 524.00.000 ПС. Изготовитель АОЗТ «Автоспецоборудование», г.Сергиев Посад, с.4].
Недостатком данного способа является низкая точность измерения суммарного люфта рулевого управления, т.к. при этом не фиксируется начало поворота передних (управляемых) колес автомобиля. Поэтому данный способ (предусмотренный ГОСТ 25478-91) с 01.01.2002 г. был отменен от обязательного применения при оценке технического состояния автомототранспортных средств.
Известен способ определения суммарного люфта рулевого управления автотранспортных средств по фиксированию угла поворота рулевого колеса от момента начала движения управляемых колес в одну сторону до момента начала их движения в другую сторону, реализованный в люфтомере ИСЛ-М [Измеритель суммарного люфта рулевого управления автотранспортных средств ИСЛ-М. Паспорт М036.000.00 ПС, Изготовитель ЗАО НПФ «МЕТА», г.Жигулевск, с.5]. Этот способ оговорен стандартом ГОСТ Р 51709-2001, который был введен в действие с 01.01.2002 г., и на сегодня является обязательным к применению при оценке технического состояния АМТС.
Однако данный способ также не обеспечивает достоверного измерения суммарного люфта рулевого управления автотранспортных средств, так как измерение производится в статике, на стоящем автомобиле, когда все люфты в сопряжениях элементов передней подвески и рулевого механизма вследствие предусмотренных в конструкции автотранспортных средств углов установки управляемых колес (продольный и поперечный углы наклона осей поворота, углы развала и пр.) выбраны таким образом, что могут взаимно компенсироваться, а следовательно, фактическая величина суммарного люфта рулевого управления может принимать значительно большие значения.
Задачей изобретения является повышение точности и достоверности измерения суммарного люфта рулевого управления автотранспортного средства.
Поставленная задача достигается тем, что в способе измерения суммарного люфта рулевого управления автотранспортного средства по фиксированию угла поворота рулевого колеса от момента начала движения управляемых колес в одну сторону до момента начала их движения в другую сторону согласно изобретению измерения проводят на движущемся автотранспортном средстве и фиксируют угол поворота рулевого колеса между моментами появления боковых ускорений автотранспортного средства.
Предлагаемый способ измерения суммарного люфта в рулевом управлении реализуют следующим образом.
На рулевое колесо автомобиля устанавливают прибор отображения его текущего положения, к кузову автомобиля (внутри салона) крепят датчик бокового ускорения. Испытуемое транспортное средство (автомобиль) начинает двигаться прямолинейно по площадке (дороге). Далее начинают поворачивать рулевое колесо вправо, при этом с началом поворота колес вправо возникает боковое ускорение, свидетельствующее о начале смещения автомобиля вправо и приводящее к появлению сигнала на выходе датчика ускорения, при появлении сигнала датчика ускорения фиксируется текущий угол положения рулевого колеса. Далее начинают поворачивать рулевое колесо влево, в момент начала смещения автомобиля влево возникает боковое ускорение противоположного знака, вызывающее появление соответствующего ему сигнала на выходе датчика ускорения, при появлении сигнала датчика ускорения фиксируется текущий угол положения рулевого колеса. Суммарный угол поворота рулевого колеса определится как разница текущих положений рулевого колеса между моментами срабатывания датчика бокового ускорения в левую и в правую стороны.
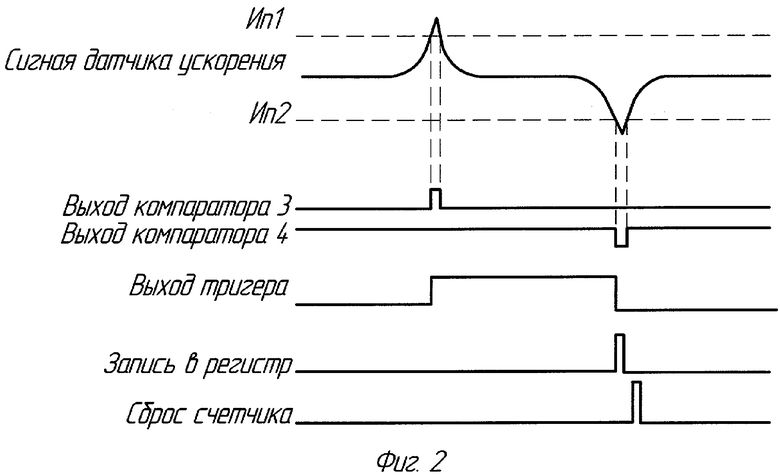
Рассмотрим пример конкретной реализации предлагаемого способа измерения по функциональной электрической схеме, приведенной на Фиг.1, и временным диаграммам сигналов, представленным на Фиг.2.
На блок-схеме Фиг.1 показаны: 1 - датчик угла поворота рулевого колеса; 2 - датчик бокового ускорения; 3, 4 - компараторы; 5 - инвертор; 6 - элемент «ИЛИ»; 7 - триггер; 8 - элемент «И»; 9 - устройство управления; 10 - измерительный счетчик; 11 - регистр; 12 - регистратор.
В исходном состоянии сигналами с первого и второго управляющих выходов устройства управления 9 измерительный счетчик 10, триггер 7 и регистр 11 сбрасываются в нуль. Сигнал с датчика ускорения 2 поступают на сигнальные входы компараторов 3 и 4, уровень срабатывания которых определяется пороговыми напряжениями Ип1 и Ип2. При положительном боковом ускорении автотранспортного средства на выходе датчика ускорения 2 возникает положительный импульс напряжения, превышающий пороговое напряжение Ип1. Это вызывает появление на выходе компаратора 3 положительного импульса, который устанавливает триггер 7 в единицу, разрешая прохождение импульсов с датчика 1 угла поворота через элемент «И» 8 на счетный вход измерительного счетчика 10. При отрицательном поперечном ускорении на выходе датчика ускорения возникает отрицательный импульс, вызывающий срабатывание компаратора 4. Импульс с выхода компаратора 4 через инвертор 5 и элемент «ИЛИ» 6 срабатывает триггер 7 в ноль, запрещая прохождение импульсов с датчика 1 угла поворота через элемент «И» 8 на измерительный счетчик 10. Код, зафиксированный счетчиком 10, будет пропорционален углу поворота рулевого колеса между двумя ускорениями противоположного знака, т.е. между начальными моментами поворота колес автотранспортного средства вправо и влево.
По заднему фронту выходного сигнала триггера 7 устройство управления 9 формирует импульс записи в регистр 11 и с задержкой на время записи формирует импульс сброса измерительного счетчика 10, подготавливая устройство к следующему циклу работы. Цифровой код с выхода регистра 11 поступает на регистратор 12.
Все узлы устройства реализуются на серийных аналоговых и цифровых интегральных микросхемах. В качестве датчика ускорения используется акселерометр MMA1260D или аналогичный. Датчиком угла служит оптический энкодер типа ВЕ178А5. Регистратор 12 представляет собой цифровой индикатор, но также может использоваться и более сложное устройство, сопрягаемое с микроЭВМ, где будет производится дальнейшая обработка результатов измерения, например их усреднение.
В результате измерения суммарного люфта рулевого управления автотранспортного средства стандартным способом в статике получено значение угла 12°, а в динамике предложенным методом 15°.
Преимуществом предлагаемого способа является то, что в результате возникающих при таком способе испытания динамических нагрузок в элементах передней подвески и рулевого привода все имеющиеся люфты и зазоры будут выбираться таким образом, что возможность их взаимной компенсации будет исключена, а значит, получаемые оценки будут иметь максимально возможные достоверность и точность.
Точность и эффективность предлагаемого способа определения суммарного люфта рулевого управления будет тем выше, чем выше будет скорость движения испытуемого транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СУММАРНОГО ЛЮФТА РУЛЕВОГО УПРАВЛЕНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2457457C1 |
| Стенд для проверки параметров рулевого управления транспортного средства | 1986 |
|
SU1332178A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2234675C2 |
| СПОСОБ КОНТРОЛЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2129712C1 |
| УСТАНОВКА ДЛЯ ПРОВЕРКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОМОБИЛЕЙ | 1969 |
|
SU238197A1 |
| СПОСОБ КОНТРОЛЯ СУММАРНОГО ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2266530C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛЮФТА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2232980C2 |
| ДИНАМОМЕТР С ГИДРАВЛИЧЕСКИМ ЛЮФТОМЕРОМ ДЛЯ ДИАГНОСТИРОВАНИЯ РУЛЕВОГО УПРАВЛЕНИЯ | 1997 |
|
RU2124713C1 |
| ЛЮФТМЕТР СО СВЕТОВЫМ УСТРОЙСТВОМ ДЛЯ ФИКСАЦИИ НАЧАЛА ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС | 2002 |
|
RU2230304C2 |
| СПОСОБ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2238534C2 |
Изобретение относится к измерительной технике и может быть использовано для измерения люфта рулевого управления автотранспортного средства. Способ заключается в фиксировании угла поворота рулевого колеса от момента начала движения управляемых колес в одну сторону до момента начала движения в другую сторону при движении автотранспортного средства. Величину суммарного люфта определяют по углу поворота рулевого колеса между моментами появления боковых ускорений противоположного знака. Технический результат заключается в повышении точности и достоверности измерений суммарного люфта. 2 ил.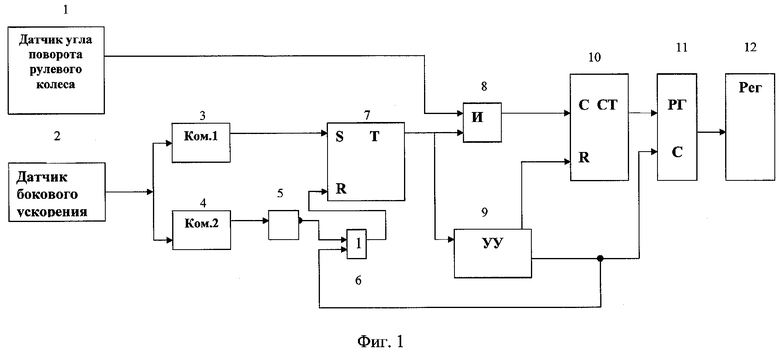
Способ измерения суммарного люфта рулевого управления автотранспортного средства по фиксированию угла поворота рулевого колеса от момента начала движения управляемых колес в одну сторону до момента начала их движения в другую сторону, отличающийся тем, что измерения проводят на движущемся автотранспортном средстве, а величину суммарного люфта рулевого колеса определяют по углу поворота рулевого колеса между моментами появления боковых ускорений противоположного знака.
| Однокамерная флотационная машина | 1936 |
|
SU51709A1 |
| Способ определения тяжести условий движения автомобиля | 1987 |
|
SU1464102A1 |

