Настоящее изобретение относится к установке для автоматической укладки отдельных изделий, в частности сосисок или иных пищевых продуктов, в лотки.
Установка, согласно настоящему изобретению, содержит первый транспортер для последовательной подачи ряда отдельных изделий в первом направлении, второй транспортер с прерывистым продвижением для подачи отдельных лотков во втором направлении, по существу перпендикулярном первому направлению, первый датчик для определения прохождения отдельных изделий, второй датчик для определения прохождения отдельных лотков и электронное управляющее устройство, которое получает управляющие сигналы от датчиков и обеспечивает регулирование шага продвижения второго транспортера с заданным запаздыванием в пределах величины, по меньшей мере равной ширине изделий, каждый раз по прохождении предварительно устанавливаемого количества изделий, отслеживаемого первым датчиком, а также шага дальнейшего продвижения второго транспортера до положения, устанавливаемого вторым датчиком таким образом, чтобы обеспечивалась возможность укладки в очередной порожний лоток первого поступающего в него изделия с первого транспортера каждый раз, когда количество сошедших с этого транспортера изделий достигает заданной величины, кратной заданному количеству изделий, прошедших мимо первого датчика. Установка отличается тем, что второй транспортер имеет по существу горизонтальную линию движения, а первый транспортер имеет выходной желоб, выходной конец которого по существу параллелен днищу лотков.
У выхода с первого транспортера предпочтительно располагается качающаяся пластинка для выравнивания подаваемых изделий в момент поступления их в лоток.
Вариант установки, выполненной в соответствии с настоящим изобретением, рассматривается ниже в качестве не ограничивающего примера его осуществления со ссылками на прилагаемые чертежи.
Фиг.1 - представленный в перспективе общий вид установки согласно изобретению, предназначенной для укладки цилиндрических изделий.
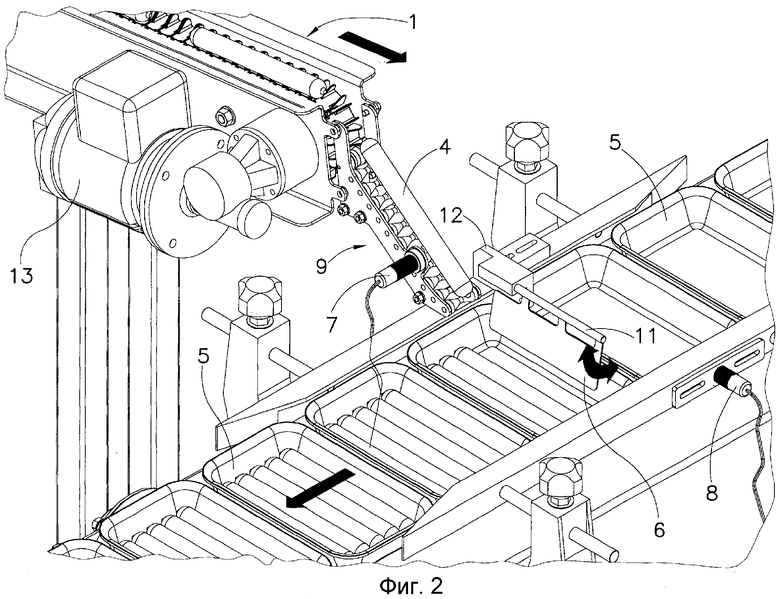
Фиг.2 - представленное также в перспективе детализированное изображение установки в увеличенном масштабе.
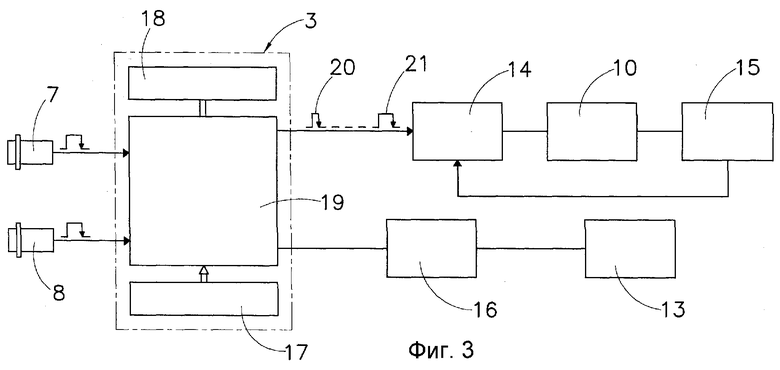
Фиг.3 - принципиальная схема системы управления, которой оснащается данная установка.
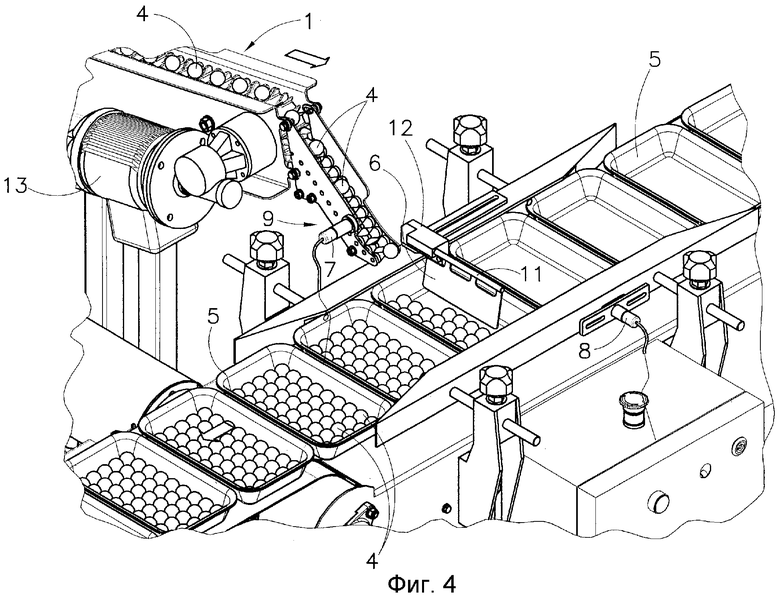
Фиг.4 - вариант установки согласно изобретению, предназначенный для укладки сферических изделий.
Установка, изображенная на фиг.1-3, предназначается, в частности, для укладки множества цилиндрических сосисок 4 в лотки 5.
Установка содержит первый транспортер 1 для транспортировки отдельных неупакованных сосисок 4 в первом направлении подачи к выходному желобу 9 и второй транспортер 2 для транспортировки лотков 5 во втором направлении подачи, по существу перпендикулярном первому направлению.Транспортер 1 приводится в движение с помощью электродвигателя 13, снабженного инвертором 16 (фиг.3), а транспортер 2 приводится в движение с помощью шагового электродвигателя 10, в частности электродвигателя постоянного тока, снабженного стартером 14 и тахогенератором постоянного тока 15 (фиг.3).
На желобе 9 установлен первый оптический датчик 7, который отслеживает прохождение сосисок 4, а на транспортере 2 установлен второй оптический датчик 8, который отслеживает прохождение лотков 5.
Предусматривается наличие качающейся пластинки 6, расположенной у выхода с желоба 9 и обеспечивающей выравнивание отдельных сосисок, которые спускаются в лоток. Пластинка 6 смонтирована с возможностью проворачивания ее на шарнире 11, который закреплен на неподвижной опоре 12, и располагается поперечно относительно направления подачи транспортера 2.
И, наконец, предусматривается электронное управляющее устройство 3, принципиальная схема которого изображена на фиг.3, где показаны блок кнопок 17, видеомонитор 18 и микропроцессор 19, который получает сигналы, поступающие от датчиков 7 и 8, и осуществляет регулирование работы электродвигателей 10 и 13 в зависимости от этих сигналов.
Более конкретно, после того, как с помощью соответствующей кнопки 17 будет осуществлен пуск установки, микропроцессор обеспечит регулирование работы электродвигателя 13 таким образом, чтобы происходила непрерывная подача неупакованных сосисок 4 транспортером 1 последовательно одна за другой. По желобу 9 сосиски 4 спускаются по одной в лотки 5, а качающаяся пластинка 6 обеспечивает выравнивание сосисок.
Перед тем как попасть в лоток, каждая отдельная сосиска проходит перед датчиком 7, который посылает соответствующий сигнал в микропроцессор 19, а тот в свою очередь подает с заданным запаздыванием на электродвигатель 10 управляющий сигнал 20, обеспечивая тем самым продвижение транспортера 2 на один шаг в пределах величины, по меньшей мере равной диаметру или ширине сосисок 4, чтобы следующая сосиска имела, таким образом, возможность лечь рядом с предыдущей сосиской параллельно ей.
По завершении заданного числа таких циклов, то есть, иными словами, когда количество сосисок, прошедших перед датчиком 7, достигнет заданной величины, кратной заданному их количеству, соответствующему завершению заполнения лотка, микропроцессор 19 (выполненный в данном случае таким образом, чтобы иметь возможность производить такой подсчет) подает на электродвигатель 10 управляющий сигнал 21, обеспечивая тем самым продвижение транспортера 2 еще на один шаг в положение, устанавливаемое датчиком 8 и соответствующее расположению очередного порожнего лотка у выхода с желоба 9, т.е. в такое положение, в котором обеспечивается возможность укладки в него первой поступающей туда сосиски с транспортера 1. Затем цикл повторяется при заполнении нового лотка.
Одновременно очередной лоток отжимает своим краем пластинку 6, проворачивая ее вокруг шарнира 11, чтобы получить при этом возможность пройти под ней, после чего она под действием собственного веса занимает свое рабочее положение. Установка, показанная на фиг.4, по существу аналогична изображенной на фиг.1-3, за исключением того, что она предназначается для заполнения лотков 5 сосисками 4 сферической формы.
При таком применении данной установки микропроцессор 19 подает управляющий сигнал 20 только после того, как датчик 7 отследит прохождение заданного количества сосисок 4.
Настоящее изобретение относится к установке для автоматической укладки отдельных цилиндрических или сферических изделий, в частности сосисок или иных пищевых продуктов, в лотки. Установка содержит первый транспортер для последовательной подачи ряда отдельных изделий в первом направлении, второй транспортер с прерывистым продвижением для подачи отдельных лотков во втором направлении, по существу перпендикулярном первому направлению. Кроме того, предусмотрены также первый датчик для определения прохождения отдельных изделий, второй датчик для определения прохождения отдельных лотков и электронное управляющее устройство, которое получает сигналы от датчиков и обеспечивает регулирование шага продвижения второго транспортера с заданным запаздыванием в пределах величины, по меньшей мере равной ширине изделий. Качающаяся пластинка, расположенная у выхода с первого транспортера, обеспечивает выравнивание подаваемых отдельных изделий в момент поступления их в лоток. 6 з.п. ф-лы, 4 ил.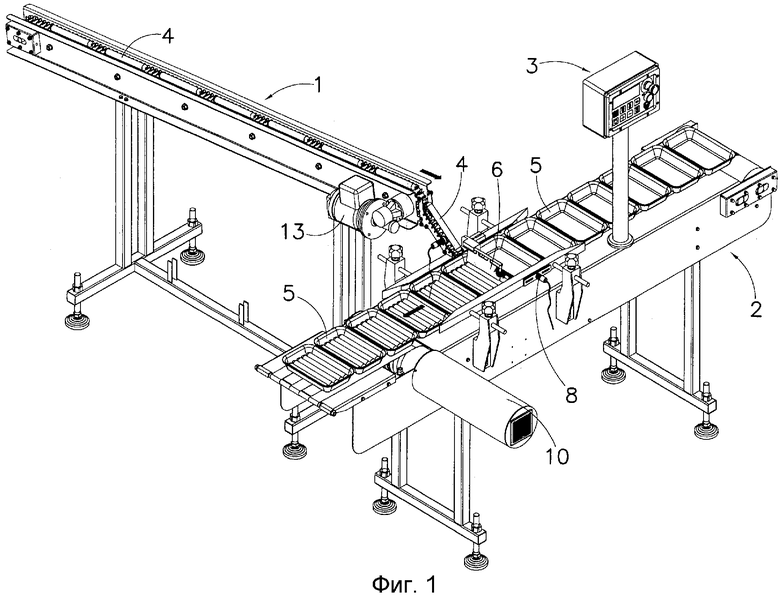
| СИСТЕМА И СПОСОБ ДЛЯ ВИРТУАЛЬНОГО ИСПЫТАНИЯ КОНФИГУРАЦИИ СИСТЕМЫ КОНДИЦИОНИРОВАНИЯ ВОЗДУХА (A/C) ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2722166C2 |
| ЕР 0230795 А2, 05.08.1987 | |||
| US 4945825 A, 07.08.1990 | |||
| US 5057055 A, 15.10.1991 | |||
| US 5060562 A, 29.10.1991 | |||
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ КОНВЕЙЕРОВ | 0 |
|
SU407807A1 |
| Загрузочное устройство для конвейеров | 1978 |
|
SU781152A1 |

