Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному маршруту.
Известен способ автоматического управления движением судна по заданному путевому углу, реализованный в «Системе автоматического управления судном» (RU 2248914 С1, 27.03.2005). Способ управления движением судна основан на использовании информации от приемника спутниковой навигационной системы, блока заданного значения путевого угла и сумматора, в котором по сигналам текущего путевого угла, заданного путевого угла, угловой скорости судна формируется сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением судна (RU 2292289 С1, 27.03 2007, принятый нами в качестве прототипа), в котором автоматическое управление движением судна осуществляется с использованием сумматора, рулевого привода, блока выработки угловой скорости, датчика руля, приемника спутниковой навигационной системы, блока заданного маршрута с задатчиком точек поворота судна на заданном маршруте. В способе управления движением судна корректируется заданное значения путевого угла в процессе плавания из точки «А» в точку «Б», затем «В»… по заданному маршруту. Это гарантирует выход судна в очередную заданную точку изменения направления движения даже при сильном волнении на море.
Известные способы автоматического управления движением по заданной траектории обеспечивают точное движение на отрезках заданной траектории только между точками изменения направления движения. В момент прихода судна в область точки изменения направления движения (пусть точка «Б») вырабатывается команда на изменение заданного путевого угла из блока заданного маршрута, но судно по инерции проскакивает это новое направление движения, выходя на новое направление заданной траектории с большим «перекатом». После выхода на новое заданное направление движения к следующей точке поворота «В» использование известного способа обеспечивает точную стабилизацию судна на заданном путевом угле и приход в точку «Г» следующего изменения направления движения судна.
Однако серьезными недостатками рассмотренных способов управления движением судна по заданной траектории от точек «А» к точке «Б», затем «В» являются:
- использование только закона стабилизации судна, при котором переход с одного направления движения на новое осуществляется с большой затяжкой по времени,
- большая инерционность судна не учитывается (т.к. процесс перехода начинается в точке излома траектории движения), что приводит к значительному уходу судна с заданной траектории в районе заданных точек изменения направления движения «Б», «В»... (переход на новый курс осуществляется с большим перерегулированием).
Рассматриваемый ниже способ лишен этих двух недостатков.
Техническим результатом предлагаемого способа автоматического управления движением судна является:
- формирование программного управления рулевым приводом (близкого к оптимальному по быстродействию) вблизи точек изменения направления движения судна вместо замкнутого закона управления по путевому углу, которое используется при движении на отрезках траектории от точки «А» к точке «Б»…,
- минимизация отклонения судна от заданной траектории при движении в области точек поворота траектории,
- определение на заданной траектории «упрежденных» точек включения программного управления, которые находятся вблизи заданных точек поворота траектории, что позволяет практически исключить перерегулирование при выходе на новый заданный путевой угол,
- определение области переключения закона программного управления на закон замкнутого управления по путевому углу при выходе судна на новое направление движения.
Технический результат достигается тем, что способ управления движением судна по заданной траектории с использованием блока заданного маршрута, приемника спутниковой навигационной системы, датчика руля, рулевого привода и сумматора, на вход которого подают сигналы:
- угловой скорости судна и текущего путевого угла - с приемника спутниковой навигационной системы,
- угла перекладки руля - с датчика руля,
- заданного путевого угла, последний формируют в блоке заданного маршрута с использованием сигналов широты и долготы точек «Б», «В»… (точек поворота заданной траектории движения судна), а также сигналов текущей широты и долготы судна - из приемника спутниковой навигационной системы, при этом в блоке заданного маршрута сформирован набор программных маневров, изменяющих направление движения судна, а также набор координат «упрежденных»точек «Бупрежд.», «Вупрежд.»,…, при достижении которых судно начинает маневр, через интервал времени «Δt» в блоке заданного маршрута формируют модуль 1ой разности между сигналом текущей широты судна и сигналом широты точки «Бупрежд.» и модуль 2ой разности между сигналом текущей долготы судна и сигналом долготы точки «Бупрежд.», если модуль 1ой разности больше величины «С» или модуль 2ой разности больше величины «С», то формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки «Бупрежд.», который вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, в следующие интервалы времени «Δt» формирование путевого угла повторяют m раз аналогично до момента времени,«Т0+mΔt», когда модуль 1ой разности между сигналом текущей широты судна и сигналом широты точки «Бупрежд.» и 2ой модуль разности между сигналом текущей долготы судна и сигналом долготы точки «Бупрежд.» будут меньше «С», то сигнал с выхода сумматора отключают от рулевого привода, на вход которого подключают сигнал программного маневра точки «Бупрежд.» из блока программного маневрирования, в следующий интервал времени «Δt» в блоке заданного маршрута формируют модуль сигнала разности текущего путевого угла и заданного путевого угла следующей точки поворота «|ПУ-ПУзд.ВГ|», если модуль сигнала разности больше допустимого значения, то через интервал времени «Δt» вновь формируют модуль сигнала разности текущего путевого угла и заданного путевого угла точки поворота «|ПУ-ПУзд.ВГ|», в момент времени «Т0+mΔt+nΔt», когда модуль сигнала разности текущего путевого угла и заданного путевого угла будет меньше допустимого значения «|ПУ-ПУзд.ВГ|< С» сигнал программного маневра точки «Бупрежд.», из блока программного маневрирования, отключают от рулевого привода, а к рулевому приводу подключают выходной сигнал от сумматора, с момента времени «T0+mΔt+(n+l)Δt». Процесс управления движением судна на следующих отрезках траектории от точки «Б» к точке «В»… повторяется аналогично рассмотренному выше.
Этот технический результат достигается:
- благодаря введению программного во времени управления маневром судна при повороте (вместо закона управления с обратной связью по путевому углу, который используется на прямолинейных участках движения по заданной траектории),
- благодаря включению программного управления с заданным упреждением (до прихода судна в точки «Б», «В»…, изменения направления движения судна по заданной траектории),
- отключению программного управления и включению закона стабилизации при выходе в область нового (заданного) направления движения.
Предлагаемый способ управления движением судна по заданной траектории осуществляется с использованием сумматора, рулевого привода, датчика руля, приемника спутниковой навигационной системы (с блоком выработки угловой скорости), блока заданного маршрута (с задатчиком точек поворота траектории из точки «А» в точку «Б», затем «В»,… по заданному маршруту, и «упреждающих» точек траектории «Бупрежд.», «Вупрежд.»,…), блока программного маневрирования (с библиотекой-набором законов программного управления) и блока переключения (для переключения закона замкнутого управления на закон программного управления и обратно).
Отличительной особенностью рассматриваемого способа является:
- использование блока программного маневрирования (с набором программ управления рулевым приводом) для осуществления поворота судна (близкого к оптимальному по времени) вблизи заданных точек изменения направления траектории движения «Б», «В»…,
- введением в блок заданного маршрута:
а) координат «упреждающих» точек в заданной траектории (используемых для включения закона программного управления рулевым приводом)
б) формирования условия обратного включения закона стабилизации путевого угла, вместо закона программного управления.
I. Формирование замкнутого закона стабилизации движения судна по заданному путевому углу (режим стабилизации при движении на прямолинейных отрезках траектории между точками «А-Б» затем «Б-В»…)
При движении между точками «А-Б» затем «Б-В»… используют:
- заданные координаты точек поворота траектории Б(φБ, λБ), затем (В φБ, λБ) (из блока заданного маршрута),
- заданные значения путевого угла «ПУЗД» (из блока заданного маршрута),
- текущие широты, долготы судна (φ, λ) и путевого угла «ПУ» (от приемника спутниковой навигационной системы (СНС),
- угловой скорости судна «ω» (с датчика угловой скорости или СНС).
Пусть судно находится в точке «А» (момент времени Т0). На выходе сумматора формируется сигнал задания скорости перекладки руля «d/dt δЗД» (или задания угла перекладки руля (δЗД)), который подают на вход рулевого привода:

где ПУ (вводится из приемника СНС), ПУзд.»А-Б»(вводится из блока заданного маршрута) - текущий и заданный путевой угол на отрезке «А-Б»,
δЗД. δ (вводится из датчика руля) - заданное и текущее значения угла перекладки руля,
ω - угловая скорость судна (вводится из приемника СНС),
Ki - постоянные коэффициенты регулирования.
Это приводит к движению судна от точки «А» (момент времени «Т0») к точке «Б» по заданному путевому углу «ПУзд. А-Б». Через интервал времени «Δt» в момент времени «T0+Δt» корректируют сигнал заданного путевого угла «ПУЗД.«А-Б»». Для этой цели в блоке заданного маршрута формируют модуль 1ой разности между сигналом текущей широты судна и сигналом широты «упрежденной» точки - начала изменения направления движения судна «Бупрежд.» (близкой к точке «Б») и модуль 2 разности между сигналом текущей долготы судна и сигналом долготы «упрежденной» точки «Бупрежд.».
Рассмотрим управление при выполнении условия (2) или (3)


где (φ-φ(Бупрежд.)), (λ-λ(Бупрежд.)) - разности текущей широты (долготы) судна и широты (долготы) «упрежденной» точки «Бупрювд» (которая расположена на траектории движения ближе к точке «А» на величину «Δ» по сравнению с точкой «Б»).
Если удовлетворяется зависимость (2) модуль 1ой разности больше величины «С» или модуль 2ой разности больше величины «С», то формируют сигнал корректированного заданного значения путевого угла (ПУзд.(А-Б).кор 1..) по текущим значениям широты и долготы судна в момент времени «T1=T0+Δt» и заданным значениям широты и долготы «упрежденной» точки «Бупрежд.» (начала поворота судна вблизи точки «Б», приближенной на величину «Δ» к точке «А»). Сигнал корректированного заданного путевого угла вводят на вход сумматора вместо «ПУзд.«А-Б»». Сигнал с выхода сумматора подают на вход рулевого привода. Рулевой привод корректирует движение судна, устраняя возникшее отклонение движения судна с заданной траектории. Процесс выработки корректированного значения заданного путевого угла многократно повторяется через интервалы времени «Δt».
II. Формирование закона программного управления в блоке программного маневрирования (когда судно находится вблизи точек изменения направления движения выполняется условие (3)).
В блоке программного маневрирования сформирован:
- набор программных маневров для всех точек поворота траектории движения: «Б», «В»,… с использованием динамической модели движения конкретного судна и конкретных величин приращений заданного путевого угла в точках «Б», «В»…: ΔПУЗД.Б=(ПУЗД.БВ - ПУзд.АБ), ΔПУзд.В=(ПУзд.ВГ - ПУзд.БВ)…, (маневры переходов ΔПУзд.i,… формировались путем моделирования и выбирались наиболее близкими к оптимальным по времени),
- набор «упрежденных» точек траектории «Бупрежд.», «Вупрежд.» (при достижении которых судном начинается процесс изменения путевого угла); координаты «упрежденных точек «Бупрежд.»… формировались с использованием конкретных программных маневров и заданных для них приращений путевого угла «ΔПУзд.i» путем вложения процесса перехода динамической модели корабля в новое направление движения с допустимым перегулированием по путевому углу.
Через «m» интервалов времени, когда будет выполняться зависимость (3) (в момент времени: T0+mΔt=ТБ- Δ1=ТБупрежд. - нахождении судна в первой «упрежденной» точке начала поворота «Бупрежд.»), в блоке программного маневрирования выбирают из набора программных маневров для всех точек поворота траектории движения:«Б» «В».'. программный маневр d/dt δзд.Бупрежд.

Сигнал по зависимости (4) из блока программного маневрирования с момента времени «ТБупрежд.» вводят на вход рулевого привода, вместо сигнала d/dt δзд по зависимости (li) с выхода сумматора. Судно начинает переход на новое заданное направление движения к ПУЗД.Б-В.
3. Переход на режим замкнутого закона управления
Формируем условие перехода на режим стабилизации в блоке заданного маршрута. Это условие должно выполняться, когда текущее значение путевого угла будет находиться в допустимой области ПУЗД.Б-В:

При выполнении условия (5) сигнал d/dt δзд Бупрежд.=f (t), поступающий из блока программного маневрирования, отключается от рулевого привода, а к рулевому приводу подключается сигнал по зависимости (li): d/dt δзд=f (ПУ-ПУзд.Б-В), поступающий с выхода сумматора. Так обеспечивается вновь замкнутое управление (стабилизация судна по путевому углу ПУЗД.<<Б-В>>):

Управление судном по ПУзд.«Б-В» продолжается до прихода судна в точку «Вупрежд.» (начала второго поворота судна (вблизи второй точки «В»). При выполнении условия (3а), которое формируется в блоке заданного маршрута

из блока заданного маршрута поступают сигналы:
- на отключение сигнала закона (li) от рулевого привода (поступающего с выхода сумматора),
- на подключение сигнала закона программного управления на вход рулевого привода (с выхода блока программного маневрирования)

Судно начинает переход на новое заданное направление движения в область ПУзд.В-Г.
В блоке заданного маршрута формируется сигнал: (ПУ- ПУзд.В-Г), когда модуль разности этого сигнала станет меньше заданного значения, то сформируется сигнал, отключающий рулевой привод от блока программного маневрирования и подключающий вход рулевого привода к выходу сумматора. Вновь включится закон стабилизации судна по путевому углу ПУзд.В-Г аналогично выше рассмотренному.
Устройство автоматического управления движением судна по заданной траектории представлено на чертеже.
Рассмотрим работу конкретного устройства автоматического управления движением судна по заданной траектории из точки «А» (с момента времени Т0) в точку «Б», реализованного в соответствии с предлагаемым способом автоматического управления движением корабля.
Устройство содержит сумматор - 1., рулевой привод - 2., блок выработки угловой скорости - 3., датчик руля - 4., приемник спутниковой навигационной системы (СНС) - 5., блок заданного маршрута - 6., блок программного маневрирования - 7., блок переключения - 8., судно - объект управления - 9.
Все связи между блоками устройства приведены на чертеже. Реализация предлагаемого устройства может быть осуществлена с использованием микросхем типа 140 УД 6 (сумматор-1., блок программного маневрирования - 7., блок заданного маршрута-6.). Блок выработки угловой скорости - 3., типовой датчик угловой скорости (ДУС-5 с чувствительностью не ниже 0,05 гр/с). Штатные корабельные системы: приемник СНС - 5., рулевой привод - 2.
Устройство автоматически обеспечивает движение корабля по заданному направлению маршрута.
На вход сумматора 1. поступают сигналы угловой скорости судна «ω» с блока выработки угловой скорости 3, угла перекладки руля «δ» - с датчика руля 4, текущего путевого угла «ПУ» с приемника спутниковой навигационной системы 5. и заданного путевого угла ПУзд. с блока заданного маршрута 6. На выходе сумматора 1. формируется заданное значение угловой скорости перекладки руля «d/dt δзд.». В соответствии с зависимостью (1) руль будет автоматически перекладываться и обеспечивать удержание судна на заданной траектории движения с путевым углом, равным заданному: ПУ=ПУзд.А-Б.
В блоке задания маршрута 6. осуществляется циклически через интервалы времени «Δt» вычисление величины заданного значения путевого угла ПУзд. (см. описание формирования корректированного (ПУзд.(А-Б).кор.1… выше). Корректированное значение ПУзд.(А-Б).кор.1… поступает на вход сумматора 1. и далее в рулевой привод 2. на перекладку руля, обеспечивая выход судна на заданное уточненное направление движения. Сигналы циклов перестройки значений ПУзд осуществляются в блоке 6. через интервал времени «Δt»
В момент времени Т0. (из приемника спутниковой навигационной системы 5.) текущие широта и долгота местонахождения судна (φ, λ) поступают в блок 6., в котором также содержатся широты и долготы всех i-«упрежденных» точек поворота судна (в рассматриваемом случае первая точка изменения направления движения - «Бупреж»). По сигналам текущего местонахождения судна (φ, λ) и точке начала поворота Бупрежд.(φi=Бупрежд., λi=Бупрежд.) формируются зависимости вида (2) и (3). Если выполняется зависимость (2), в блоке 6. формируется заданное значение путевого угла по текущему местонахождению судна (φ, λ) и точке Бупрежд. (φi= Бупрежд.…, λi=Бупрежд.).
Если выполняется зависимость (3) (что соответствует нахождению судна в точке «Бупрежд.» в момент времени ТБупрежден.=Т0+m Δt - первого поворота судна) из блока заданного маршрута - 6 поступает сигнал на формирование в блоке программного маневрирования - 7 программы маневрирования d/dt δзд.Бупрежд. (из суммарного набора программ маневрирования в блоке - 7). Сигнал из блока заданного маршрута - 6 также поступает в блок переключения - 8 на подключение блока программного маневрирования - 7 к входу рулевого привода - 2 и отключению от рулевого привода - 2 выхода сумматора - 1. Это приведет к началу маневра судна с путевого угла «ПУзд.«АБ»» в область ПУзд.Б-В. Через каждый интервал времени Δt в блоке заданного маршрута - 6 формируется сигнал по зависимости (5). В момент времени, когда условие (5) удовлетворится, из блока заданного маршрута - 6 поступит сигнал в блок переключения - 8 на отключение выхода блока - 7 и подключения сигнала с блока - 1 к рулевому приводу, что приведет к переходу на режим стабилизации судна на отрезке траектории «Б-В» с путевым углом ПУзд.«Б-В».
Проведенное моделирование рассмотренного выше способа автоматического управления с перестройкой законов управления судном подтвердило его работоспособность, а следовательно, и высокой эффективности предложенного способа управления движением судна по заданной траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| СПОСОБ РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМИ ОБЪЕКТАМИ | 2008 |
|
RU2364546C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
Изобретение относится к области судовождения, в частности к автоматическому управлению движением судна. В способе используют сигналы текущего путевого угла и заданного значения путевого угла, которые совместно с сигналами угловой скорости судна и угла перекладки руля используют для формирования управляющего сигнала рулевым приводом судна. В способе через фиксированные интервалы времени формируют модуль первой разности текущей широты судна и широты «упрежденной» точки поворота судна и модуль второй разности текущей долготы судна и долготы «упрежденной» точки поворота судна. Если любой из указанных модулей больше величины «С», то формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы упрежденной точки. Если указанные модули сигналов разности меньше заданной величины «С», то подключают сигнал программного маневра упрежденной точки. В следующий интервал времени «Δt» формируют модуль сигнала разности текущего путевого угла и заданного путевого угла следующей точки поворота. Если модуль сигнала разности больше допустимого значения, то через интервал времени «Δt» вновь формируют модуль сигнала разности текущего путевого угла и заданного путевого угла точки поворота. Когда модуль сигнала разности текущего путевого угла и заданного путевого угла будет меньше допустимого значения, сигнал программного маневра «упрежденной» точки отключают от рулевого привода, а к рулевому приводу подключают выходной сигнал от сумматора. Достигается минимизация отклонения судна от заданной траектории движения при движении в области точек поворота траектории. 1 ил.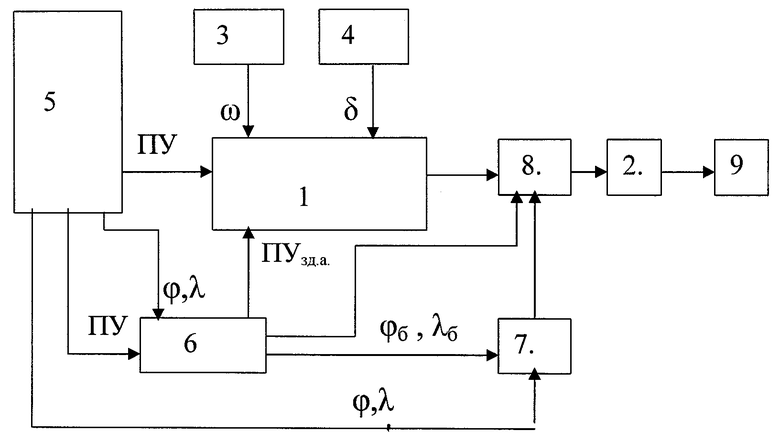
Способ управления движением судна по заданной траектории с использованием блока заданного маршрута, приемника спутниковой навигационной системы, датчика руля, рулевого привода и сумматора, на вход которого подают сигналы: угловой скорости судна и текущего путевого угла - с приемника спутниковой навигационной системы, угла перекладки руля - с датчика руля, заданного путевого угла, последний формируют в блоке заданного маршрута с использованием сигналов широты и долготы точек «Б», «В»… (точек поворота заданной траектории движения судна), а также сигналов текущей широты и долготы судна - из приемника спутниковой навигационной системы, отличающийся тем, что в блоке заданного маршрута сформирован набор программных маневров, изменяющих направление движения судна, а также набор координат «упрежденных» точек «Бупрежд.», «Вупрежд.»,…, при достижении которых судно начинает маневр, через интервал времени «Δt» в блоке заданного маршрута формируют модуль первой разности между сигналом текущей широты судна и сигналом широты точки «Бупрежд.» и модуль второй разности между сигналом текущей долготы судна и сигналом долготы точки «Бупрежд.», если модуль первой разности больше величины «С» или модуль второй разности больше величины «С», то формируют сигнал заданного значения путевого угла по текущим значениям широты и долготы судна и заданным значениям широты и долготы точки «Бупрежд.», который вводят на вход сумматора, сигнал с выхода сумматора подают на вход рулевого привода, в следующие интервалы времени «Δt» формирование путевого угла повторяют m раз аналогично до момента времени «T0+mΔt» когда модуль первой разности между сигналом текущей широты судна и сигналом широты точки «Бупрежд.» и модуль второй разности между сигналом текущей долготы судна и сигналом долготы точки «Бупрежд.» будут меньше «С», то сигнал с выхода сумматора отключают от рулевого привода, на вход которого подключают сигнал программного маневра точки «Бупрежд.» из блока программного маневрирования, в следующий интервал времени «Δt» в блоке заданного маршрута формируют модуль сигнала разности текущего путевого угла и заданного путевого угла следующей точки поворота «|ПУ-ПУзд.ВГ|», если модуль сигнала разности больше допустимого значения, то через интервал времени «Δt» вновь формируют модуль сигнала разности текущего путевого угла и заданного путевого угла точки поворота «|ПУ-ПУзд.ВГ|», в момент времени «T0+mΔt+nΔt», когда модуль сигнала разности текущего путевого угла и заданного путевого угла будет меньше допустимого значения: «|ПУ-ПУзд.ВГ|<С», сигнал программного маневра точки «Бупрежд.» из блока программного маневрирования отключают от рулевого привода, а к рулевому приводу подключают выходной сигнал от сумматора, с момента времени «T0+mΔt+(n+1)Δt» процесс управления движением судна на следующих отрезках траектории от точки «Б» к точке «В»… повторяется аналогично рассмотренному выше.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| Система управления движением судна | 1978 |
|
SU717730A1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |

