Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна с выбором вида используемых корабельных исполнительных средств при расхождении с встречным объектом.
Известен способ швартовки судна [патент России №2330789], в котором сигнал коррекции к заданному путевому углу «ΔПУзд» формируют с использованием радара (выдающего сигналы вектора расстояния от судна до встречного объекта - пирса). Сигналы текущей широты, долготы, скорости хода и путевого угла судна используют от приемника спутниковой навигационной системы для формирования сигналов прогнозируемого движения судна и встречного объекта. (В вычислителе формируют сигнал коррекции к заданному путевому углу «ΔПУзд», который вводят в сумматор рулевого привода. Программный блок изменяет скорость хода судна с использованием регулятора оборотов гребного винта.)
Недостатком рассмотренного способа является использование только регулятора оборотов гребного винта при расхождении с объектом.
Известен также способ расхождения судна с встречным объектом [Острецов Г.Э., Клячко Л.М. Автоматическое расхождение судна с встречным объектом. // Морской вестник №3(27). С.-Петербург. 2008 г., стр.65, 66], принятый нами в качестве прототипа:
- обеспечивающий автоматическое выявление встречных объектов, с которыми возможно столкновение,
- определяющий требуемую корректировку в направлении движения судна, при которой будет исключена возможность столкновения (коррекция заданного путевого угла «ΔПУзд»),
- вводящий это изменение в движения судна.
Недостатком рассмотренного способа является то, что для исключения столкновения с встречным объектом производится перевод судна с заданной траектории движения - изменением заданного путевого угла, причем режим изменения скорости хода судна не рассматривается. В то время как в ряде случаев исключить столкновение со встречным объектом можно более эффективно, если изменить только скорость хода судна, не изменяя значение заданного путевого угла (траектория движения судна при этом остается неизменной).
Целью предлагаемого способа является предварительный выбор вида используемого исполнительного средства при расхождении (рулевого привода или регулятора оборотов гребного винта) для достижения «оптимального» режима работы системы расхождения судна со встречным объектом.
Расхождение судна с встречным объектом может осуществляться при использовании предложенного нами способа либо рулевым приводом (путем коррекции заданного путевого угла для изменения направления движения судна), либо регулятором оборотов гребного винта (производится изменение скорости хода судна с сохранением заданного направления движения).
Способ выбора исполнительных средств в системе расхождения судна с встречным объектом использует:
- приемник спутниковой навигационной системы (СНС), вырабатывающий текущую широту, долготу, путевой угол и скорость хода судна;
- радар, выдающий сигнал вектора расстояния от судна до встречного объекта;
- вычислитель, в котором формируют сигналы текущей широты, долготы и вектор скорости встречного объекта (по сигналам от радара и от приемника СНС); в вычислителе также формируют будущие траектории движения судна и встречного объекта, используя которые формируют условия столкновения судна с встречным объектом, формируют требуемый сигнал коррекции к заданному путевому углу «ΔПУзд» для использования рулевого привода, а также требуемый сигнал коррекции к заданной скорости хода судна «ΔVi=n», для использования регулятора оборотов гребного винта.
В предложенном способе дополнительно используют:
1) прогнозатор, в котором формируют:
- сигнал времени t«ΔV» будущего перехода судна до следующей (заданной) точки изменения направления траектории Арасч (при корректировке заданной скорости хода судна на величину «ΔVi=n»),
- сигнал времени t«ΔПУзд» будущего перехода судна до следующей (заданной) точки изменения направления траектории Арасч (при корректировке заданного путевого угла на величину «ΔПУзд»),
2) логический блок, в котором, используя сигналы t«ΔПУзд и t«ΔV», формируют сигнал «ΔПУзд» или «ΔVi=n» на подключение «оптимального» исполнительного средства (при котором расхождение со встречным объектом и выход судна к следующей заданной точке изменения направления траектории движения Арасч осуществляется за меньшее время).
Рассмотрим последовательность выполнения операций в предложенном способе.
1. Выработка сигнала коррекции «ΔVi=n» (при которой исключается столкновение)
При появлении встречного объекта в вычислителе формируют сигналы текущей широты «Фоб» и долготы «λоб» встречного объекта, вектор расстояния от судна до встречного объекта «Lоб,cуд», путевой угол встречного объекта «ПУоб» и скорость хода встречного объекта «Vоб». С этой целью из радара и приемника СНС вводят в вычислитель сигналы:
- пеленг встречного объекта «П»,
- расстояние от встречного объекта до судна «Lоб,суд»,
- текущего курса судна «φ»,
- текущей широты судна «Фi»,
- текущей долготы судна «λi»,
- путевого угла судна «ПУсуд.i,
- текущей скорости судна Vсуд.i.
а. Текущая широта и долгота встречного объекта определяется:
где φ - текущий курс судна,
П - текущий пеленг встречного объекта,
Lоб,суд - расстояние от судна до встречного объекта,
Фоб, λоб, (Фсуд, λсуд) - текущая широта и долгота встречного объекта (судна).
б. Путевой угол встречного объекта определяется:

где ПУоб - текущий путевой угол встречного объекта,
Фоб.i-1, λоб.i-1 и Фоб.i, λоб.i - текущая широта и долгота встречного объекта в момент времени «t» и в следующий момент времени «t+Δt».
в. Скорость хода встречного объекта определяется:

где Фоб.i-1, λоб.i-1 и Фоб.i, λоб.i - текущая широта и долгота встречного объекта в момент времени t и в следующий момент времени t+Δt,
Vоб - скорость движения встречного объекта,
d/dt - символ дифференцирования.
г. Используя полученные по зависимостям (1-3) сигналы текущей широты, долготы и вектор скорости встречного объекта и из приемника СНС сигналы широты, долготы и скорости хода судна, формируют траектории будущего движения судна и встречного объекта, по которым определяют широту и долготу точки (Фn. λn) пересечения отрезков траекторий будущего движения судна и встречного объекта:

где Фоб.i+Фоб.=К1(λоб.i-λоб),
Фсуд.i+Фсуд=К2(λсуд.i-λсуд),
Фоб, Фсуд, λоб, λсуд - текущие широта и долгота встречного объекта и судна.
д. Используем условие одновременного будущего нахождения судна и встречного объекта вблизи точки пересечения двух траекторий (Фn, λn):

где tсуд, tоб - время движения судна и встречного объекта от начального состояния {(Фсуд, λсуд). (Фоб, λоб)} до точки пересечения траекторий (Фn, λn).
е. При выполнении условия (5) в вычислителе вырабатывается сигнал уставки ΔVсуд, который определяется из зависимостей:

где Vсуд. корр=Vсуд+ΔVсуд,
tсуд. корр=Lсуд/Vсуд.корр,
tоб=Lоб/Vоб,
Lсуд - расстояние между текущим положением судна (Фсуд, λсуд)
и точкой пересечения траекторий Аn (Фn, λn),
Lоб - расстояние между текущим положением встречного объекта (Фоб, λоб) и точкой пересечения траекторий Аn(Фn, λn),
Vсуд.корр, Vоб - корректированная скорость движения судна и скорость встречного объекта,
знак приращения скорости ΔVсуд определяется:
при tсуд-tоб<0, -ΔVсуд (в отрицательной области приращения скорости хода судна),
при tсуд-tоб>0, +ΔVсуд (в положительной области приращения скорости хода судна).
ж. Сигнал коррекции скорости хода судна «ΔVсуд» вводят в прогнозатор.
2. Выработка сигнала коррекции путевого угла «ΔПУзд» (при котором исключается столкновение в точке Аn).
а. Используя зависимости (1)-(5), формируем сигнал коррекции заданного путевого угла АПУА1: при движении в точку А1

где ПУзд - заданное значение путевого угла до начала режима расхождения,
ПУзд.A1 - заданное значение корректированного путевого угла для перехода судна в точку A1.
б. Определение времени «tА1судна» движения судна от текущей точки А0суд до точки пересечения траекторий А1 и времени «tA1объекта» движения встречного объекта, от точки А0об до точки пересечения траекторий А1:
tА1судна=L1с(А0суд(Ф0, λ0)-А1(ФА1, λА1))/Vс,
tА1объекта=L1об(А0об(Ф0об, λ0об)-А1(ФА1, λА1))/Vоб,
где: А0суд - (Ф0, λ0) - текущая точка местонахождения судна,
А0об - текущая точка местонахождения встречного объекта,
A1(ФА1, λА1) - точка будущего нахождения судна и встречного объекта при движении судна с корректированным путевым углом ПУзд.А1,
Vc - скорость хода судна,
Vоб - скорость хода встречного объекта,
L1суд - длина отрезка между точками А0суд и A1,
L1oб - длина отрезка между точками А0об и A1,
Δ-var. (изменяется в диапазоне -С<Δ<+С).
в. Формируем сигнал условия столкновения в окрестности точки A1(5A1a) или (5А1б) условия безопасного прохождения судна через точку A1.


При выполнении условия (5A1б) выработанный сигнал коррекции вектора заданного движения судна ΔПУi=1, вводится в прогнозатор.
При выполнении условия (5A1а) формируется новый сигнал коррекции в направлении вектора заданного движения судна ΔПУi=2, который используется в повторном цикле вычислений для выявления возможности столкновения в точке А2. Аналогично рассмотренным циклам повторяют циклы вычислений до «n» цикла, когда выполняется условие безопасного прохождения через точку Аn (5Аnб), тогда сигнал коррекции заданного путевого угла «n» цикла «ΔПУi=n» вводят в прогнозатор (это соответствует будущему режиму перехода судна из точки А0 в точку Аn с путевым углом заданным ПУзд.Аn=ПУзд+ΔПУi=n).
3. Формирование сигналов времени будущего перехода судна до следующей (заданной) точки изменения траектории движения Арасч.
В прогнозаторе, используя сигналы «ΔПУi=n» и «ΔVi=n», формируют время движения судна от точки А0 до расчетной точки изменения направления траектории движения судна Арасч.
а. Формирование времени движения судна ТΔПУi=n при использовании корректирующего сигнала «ΔПУi=n»:

где
tсуд.«ΔПУi=n»=Lсуд.«ΔПУi=n»/Vсуд,
tAnсуд.=Lсуд.расч/Vсуд,
Lсуд.«ΔПУi=n» - расстояние между текущим положением судна
А0(Фсуд, λсуд) и точкой пересечения траекторий Аn (Фn, λn),
Lсуд.расч - расстояние между точками Аn и Арасч,
Vсуд - скорость движения судна,
tсуд.«ΔПУi=n» - расчетное время движения судна от точки А0 до Аn,
tAnсудна - время движения судна от точки Аn до точки Арасч,
Арасч - ближайшая точка изменения направления траектории движения судна.
Сигнал времени ТΔПУi=n вводят в блок логики.
б. Формирование времени движения судна при использовании корректирующего сигнала «ΔV» » до точки траектории Арасч:

где tсуд.«ΔV»=Lсуд/Vсуд.кор»
Lсуд - расстояние между текущим положением судна А0суд
и точкой пересечения траекторий Ai=n,
Vсуд.кор=Vсуд-ΔV,
tсуд.An=Lсуд.расч/Vсуд.зд,
Lсуд.расч - расстояние между точкой Аn и точкой Арасч,
Vсуд - заданная скорость хода судна.
Сигнал ТΔV вводят в блок логики.
4. Формирование сигнала на подключение «оптимального» исполнительного средства в блоке логики

вычислителя вводят в регулятор оборотов гребного винта.

вычислителя вводят в сумматор рулевого привода судна.
Описание работы системы расхождения судна с предварительным выбором исполнительного средства (см. фиг.)
Рассмотрим структуру системы расхождения судна с встречным объектом, дополненную подсистемой выбора исполнительных средств. При движении судна радар 1 выдает сигналы пеленга и расстояния судна до встречного объекта в вычислитель 2. Сигналы текущей широты, долготы и вектора скорости хода судна из приемника спутниковой навигационной системы (СНС) 3 поступают на вход сумматора рулевого привода 4 и на второй вход вычислителя 2.
В вычислителе 2 вырабатываются сигналы:
- широты, долготы и вектор скорости хода встречного объекта (см, зависимость (1)-(3)),
- траектории будущего движения судна и встречного объекта (см. зависимость (4)),
- времени движения судна и времени движения встречного объекта до места пересечения траекторий (см. зависимость (5)),
- коррекции скорости хода судна «ΔVсуд» (см. зависимость (5А)),
- коррекции заданного путевого угла «ΔПУзд». (см. зависимость (6)).
В прогнозаторе 5 вырабатываются сигналы:
- времени движения судна Т«ΔПУi=n» при использовании корректирующего сигнала «ΔПУi=n» (см. зависимость (7)),
- времени движения судна Т«ΔVзд» при использовании корректирующего сигнала «ΔV» (см. зависимость (8)).
В блоке логики 6 вырабатываются сигналы на подключение:
- коррекции скорости хода судна «ΔVi=n» из вычислителя 2 на вход регулятора оборотов гребного винта 7 (при выполнении зависимости (9) скорость хода судна будет Vсуд.корр=Vсуд-ΔVсуд),
- коррекции заданного путевого угла «ΔПУi=n» из вычислителя 2 на вход сумматора рулевого привода 4 (при выполнении зависимости (10) судно 9 начинает двигаться не по заданному путевому углу «ПУзд», а по скорректированному путевому углу «ПУзд.-ΔПУi=n».
На вход сумматора рулевого привода 4 также поступают сигналы заданного путевого угла «ПУзд», путевой угол «ПУ» и угловая скорость судна «ω» от приемника СНС 3. Таким образом, формируется автоматическое управление судном по скорректированному путевому углу и заданной скорости хода «Vсуд»:

где δзд - задание на угол перекладки руля, поступающее на вход штатного рулевого привода 8 с выхода сумматора рулевого привода 4.
Проведенное моделирование рассмотренной выше системы подтвердило работоспособность предложенного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМИ ОБЪЕКТАМИ | 2008 |
|
RU2364546C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
Изобретение относится к области судовождения, в частности к автоматическому управлению движением судна при расхождении со встречным объектом. Для выбора исполнительных средств в системе расхождения судна с встречным объектом используют радар, регулятор оборотов гребного винта, рулевой привод, приемник спутниковой навигационной системы, сумматор рулевого привода, блок логики и прогнозатор. На вход прогнозатора вводят сигналы текущей широты, долготы, путевого угла и скорости из приемника спутниковой навигационной системы и два сигнала из вычислителя - коррекции скорости хода судна и коррекции заданного путевого угла, для расчета времени движения судна. Сигналы расчетного времени движения судна с выхода прогнозатора вводят в блок логики для выбора либо регулятора оборотов гребного винта для коррекции скорости хода судна, либо сумматора рулевого привода для коррекции заданного путевого угла. Изобретение обеспечивает оптимальный режим работы системы расхождения судна со встречным объектом. 1 ил.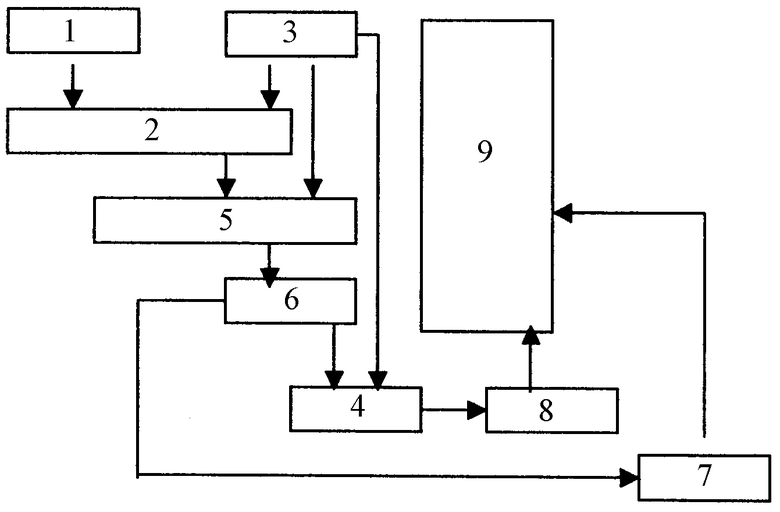
Способ выбора исполнительных средств в системе расхождения судна с встречным объектом с использованием радара, регулятора оборотов гребного винта, рулевого привода, приемника спутниковой навигационной системы и сумматора рулевого привода, на вход которого вводят сигналы с приемника спутниковой навигационной системы, текущего и заданного путевого угла, угловой скорости судна, сигнал с сумматора рулевого привода подают на вход рулевого привода, отличающийся тем, что для формирования сигналов выбора исполнительных средств дополнительно используют блок логики и прогнозатор, на вход которого вводят сигналы текущей широты, долготы, путевого угла и скорости хода судна из приемника спутниковой навигационной системы и два сигнала из вычислителя - коррекции скорости хода судна ΔVсуд и коррекции заданного путевого угла ΔПУзд, сигналы расчетного времени движения судна ТΔПУ i=n и ТΔVзд с выхода прогнозатора вводят в блок логики, в котором формируют сигналы подключения либо коррекции скорости хода судна ΔVсуд к регулятору оборотов гребного винта, либо коррекции заданного путевого угла ΔПУзд к сумматору рулевого привода.
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |

