Изобретение относится к погрузочно-транспортной технике и может быть использовано в авто- и электропогрузчиках.
Известен грузоподъемник, содержащий три секции и грузовую каретку, прикрепленный к первой секции гидроцилиндр подъема, прикрепленные своими первыми концами соответственно к первой и второй секциям первый и второй гибкие тяговые элементы, прикрепленные соответственно к второй и третьей секциям шкив секций и верхний шкив, охватываемые сверху соответственно первым и вторым гибкими тяговыми элементами, второй конец первого гибкого тягового элемента прикреплен к третьей секции и к ней же прикреплена с возможностью своего перемещения вверх грузовая каретка (DE 3435690, 1987, МКИ B66F 9/08).
Недостатком этого грузоподъемника является отсутствие специального свободного хода - возможности без увеличения габаритной высоты грузоподъемника перемещать вверх грузовую каретку с грузозахватным приспособлением на высоту, соизмеримую с высотой обрабатываемого груза, что ограничивает возможности обработки грузов этим грузоподъемником в помещениях с низкими потолками (вагонах, фурах, контейнерах), поскольку этот грузоподъемник не способен обработать груз, размещенный на втором и последующих ярусах.
Технический эффект предложения заключается в том, в нем реализован режим специального свободного хода
Данный технический эффект достигается тем, что грузоподъемник погрузчика, содержащем три секции, грузовую каретку, два гибких тяговых элемента, гидроцилиндр подъема со штоком, шкив второй секции и шкив третьей секции, причем вторая секция, третья секция и грузовая каретка прикреплены, соответственно, к первой, второй и третьей секциям с возможностью своего перемещения вверх, гидроцилиндр подъема, шкив второй секции и шкив третьей секции прикреплены, соответственно, к первой, второй и третьей секциям, шкив второй секции и шкив третьей секции огибаются, соответственно, первым и вторым гибкими тяговыми элементами, концы первого гибкого тягового элемента прикреплены к первой и третьей секциям, концы второго гибкого тягового элемента прикреплены к грузовой каретке и второй секции, отличающийся тем, что содержит шкив гидроцилиндра подъема, нижний шкив второй секции и два ограничителя перемещения второго гибкого тягового элемента, который имеет два упора, выполненных с возможностью взаимодействия каждый со своим ограничителем, второй гибкий тяговый элемент последовательно огибает прикрепленный к штоку гидроцилиндра подъема шкив гидроцилиндра подъема и прикрепленный ко второй секции нижний шкив второй секции, при этом ограничители перемещения второго гибкого тягового элемента могут быть прикреплены к одной из секций или штоку гидроцилиндра подъема и могут быть выполнены с возможностью своего включения/отключения.
На графических материалах изображено:
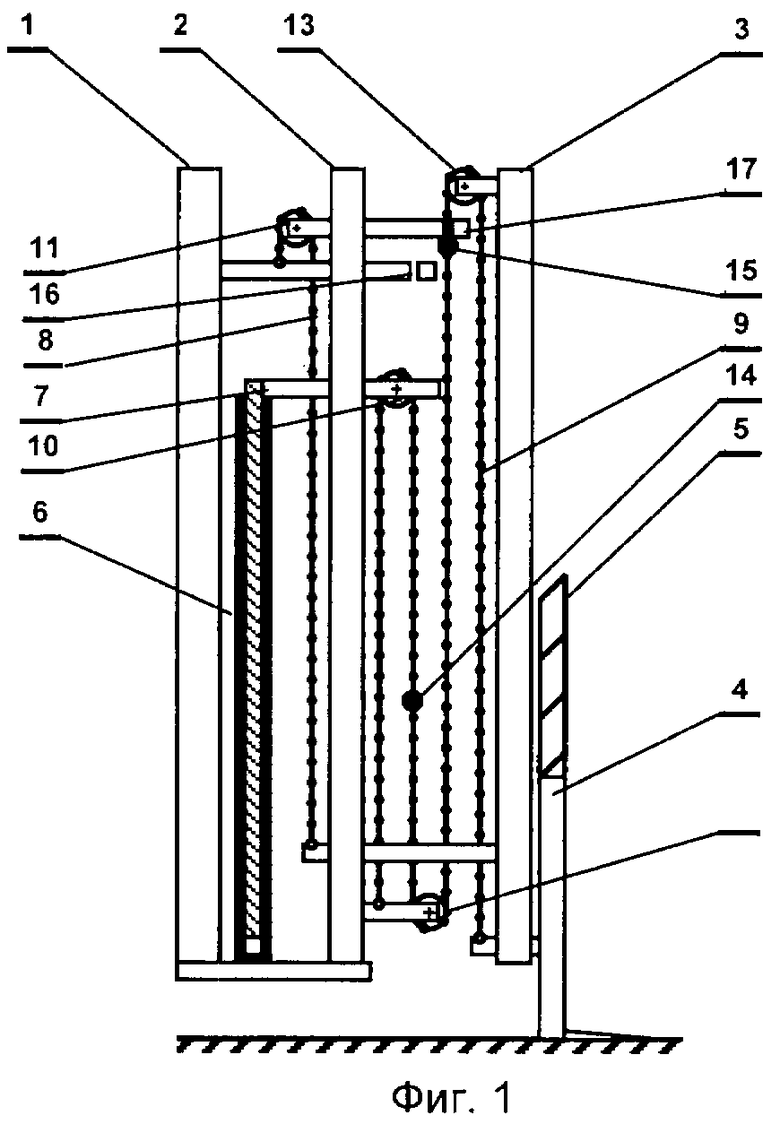
фиг.1 - грузоподъемник (по пп.1 и 2 формулы изобретения) в исходном положении;
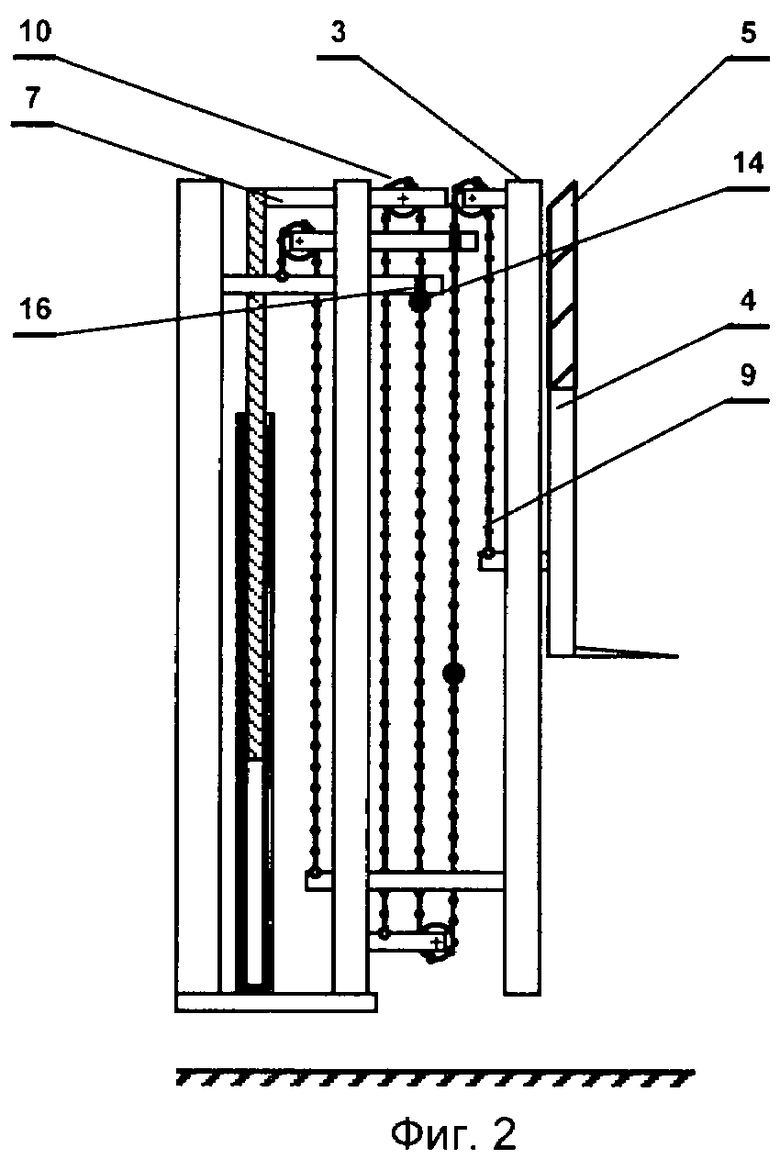
фиг.2 - то же, в конце первого этапа подъема;
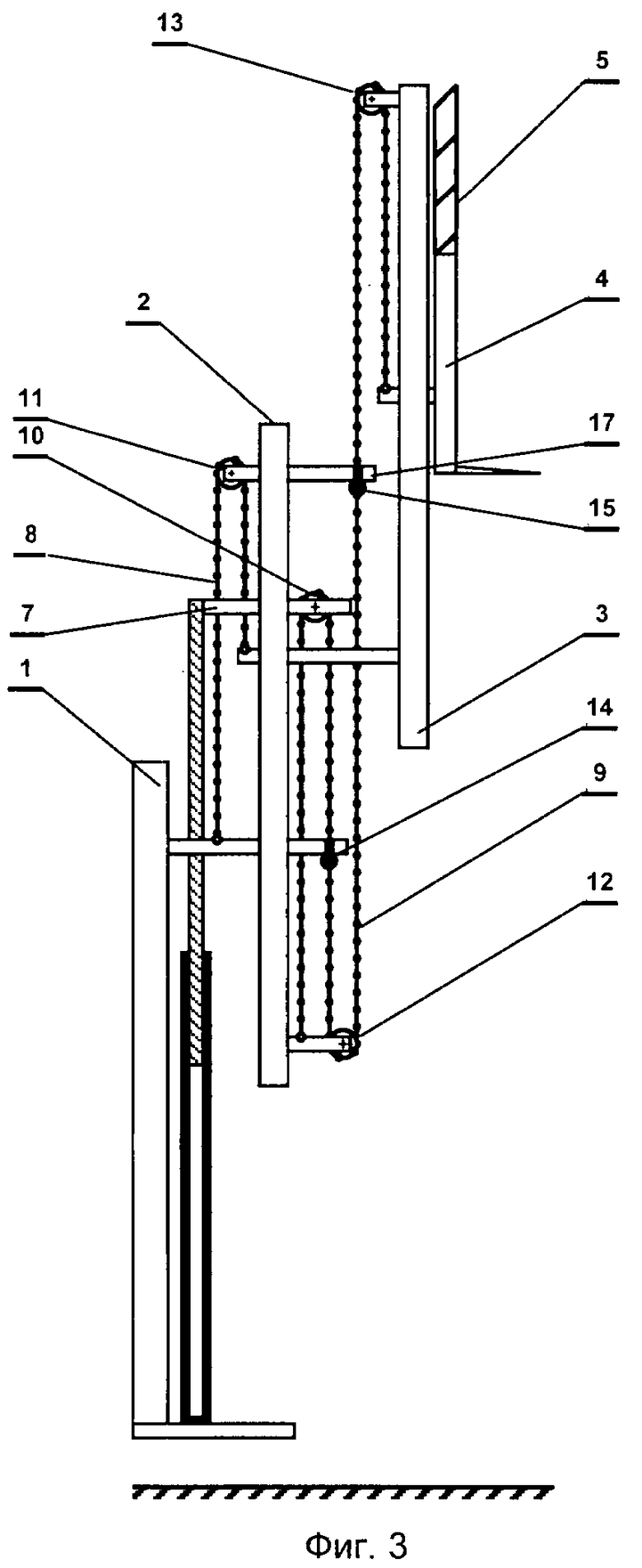
фиг.3 - то же, в конце второго этапа подъема;
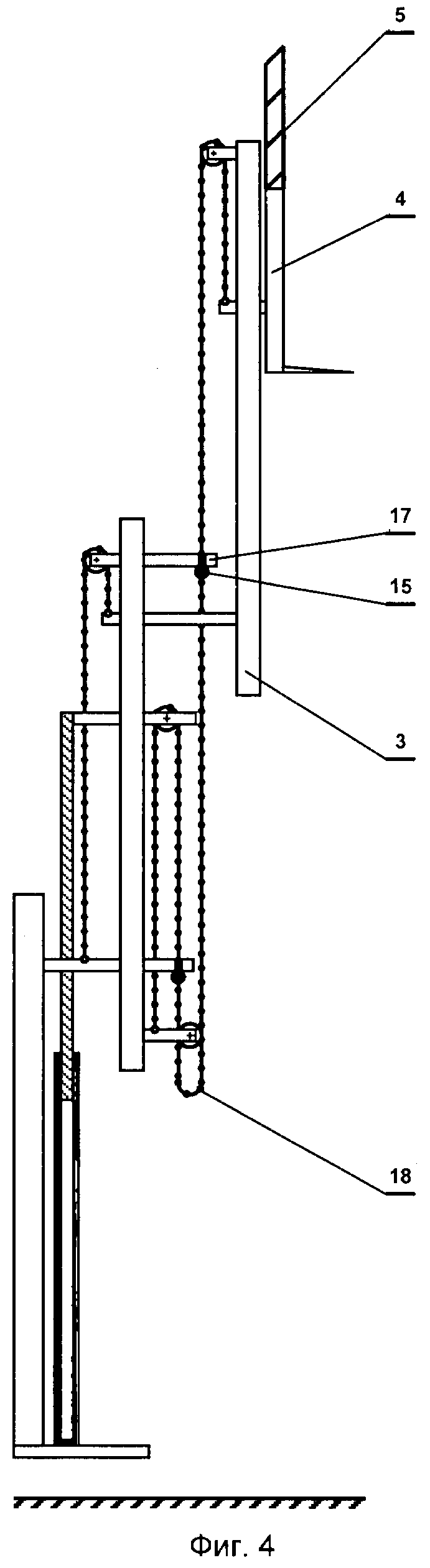
фиг.4 - то же, в конце третьего этапа подъема;
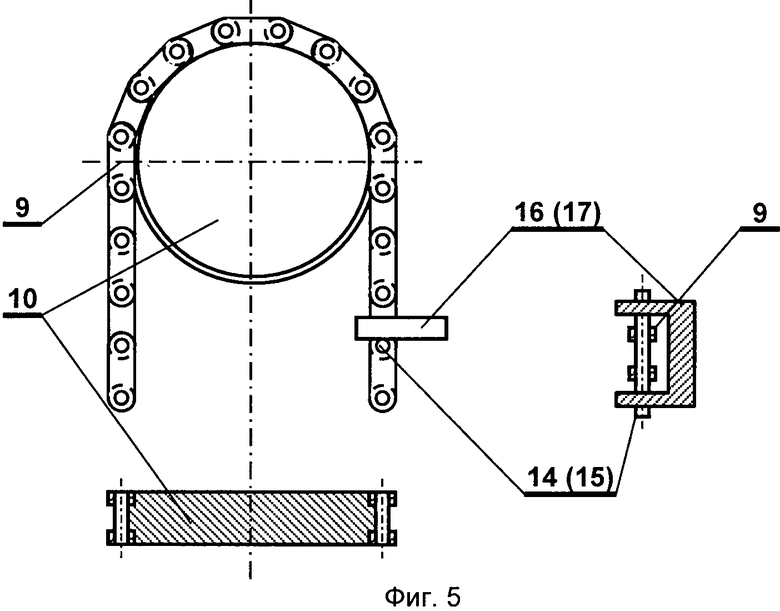
фиг.5 - пример исполнения ограничителя перемещения;
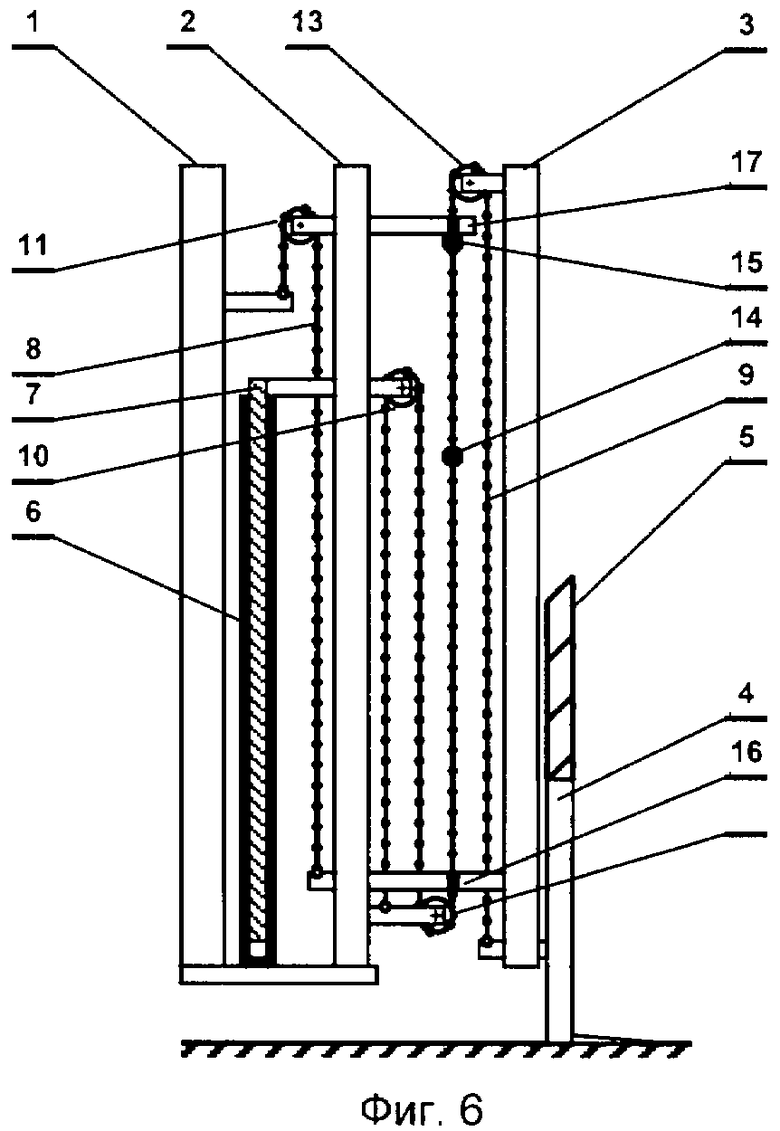
фиг.6 - грузоподъемник (по пп.1 и 3 формулы изобретения) в исходном положении;
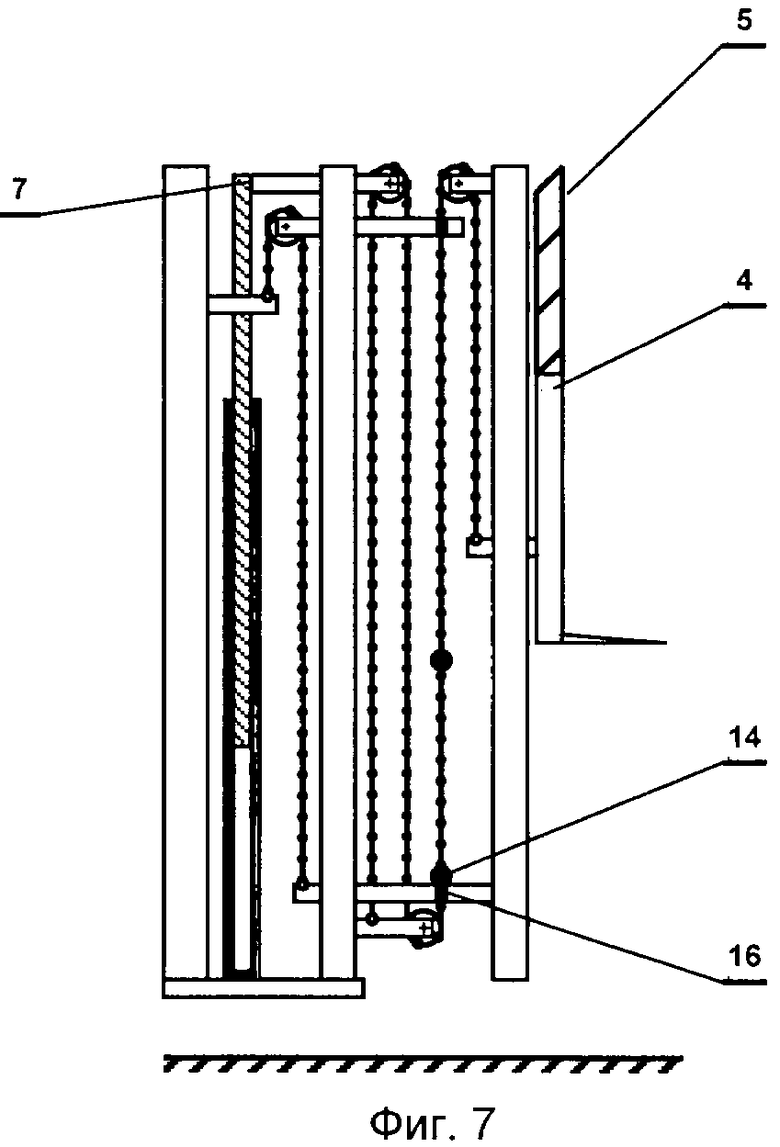
фиг.7 - то же, в конце первого этапа подъема;
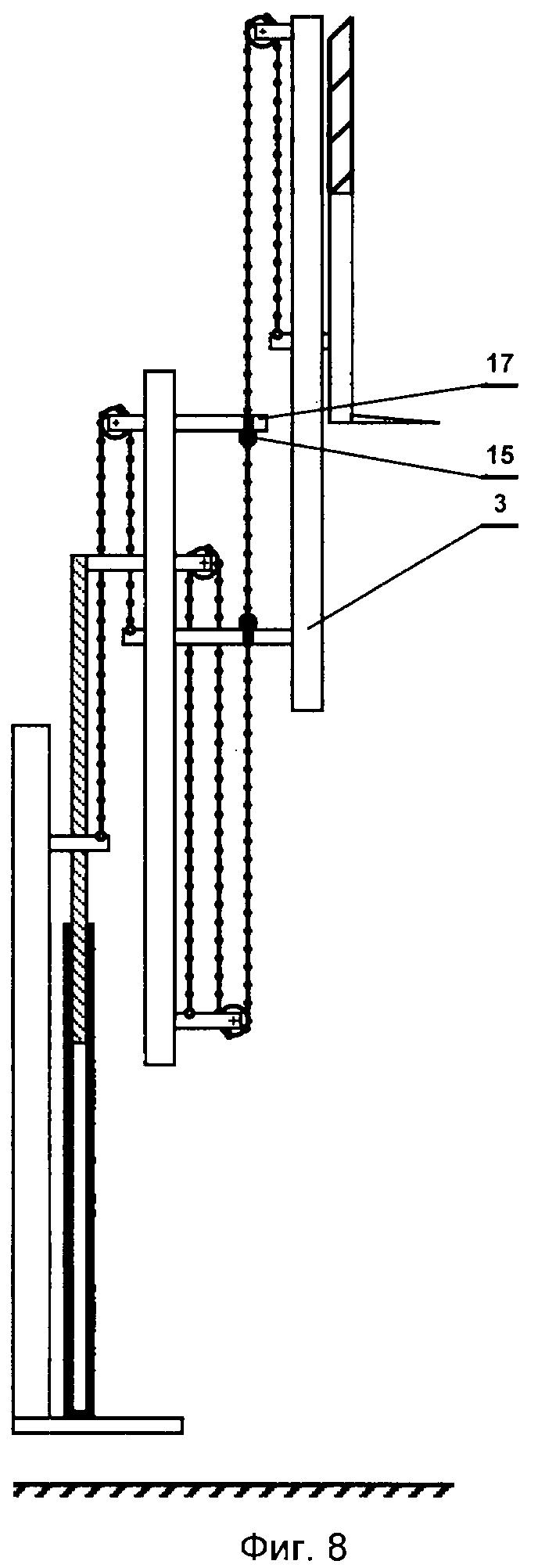
фиг.8 - то же, в конце второго этапа подъема;
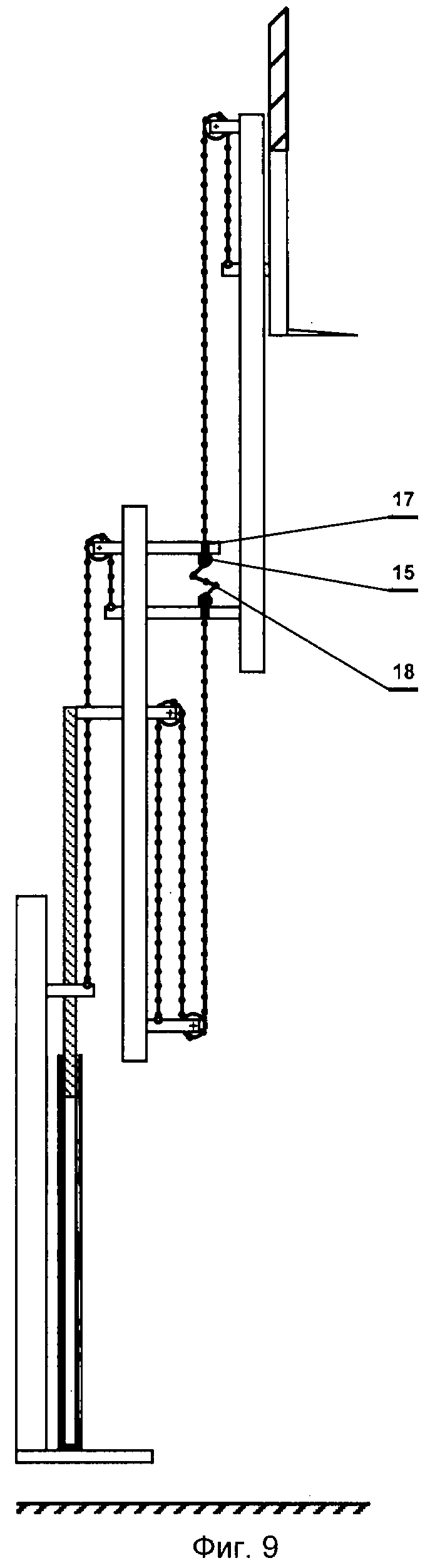
фиг.9 - то же, в конце третьего этапа подъема;
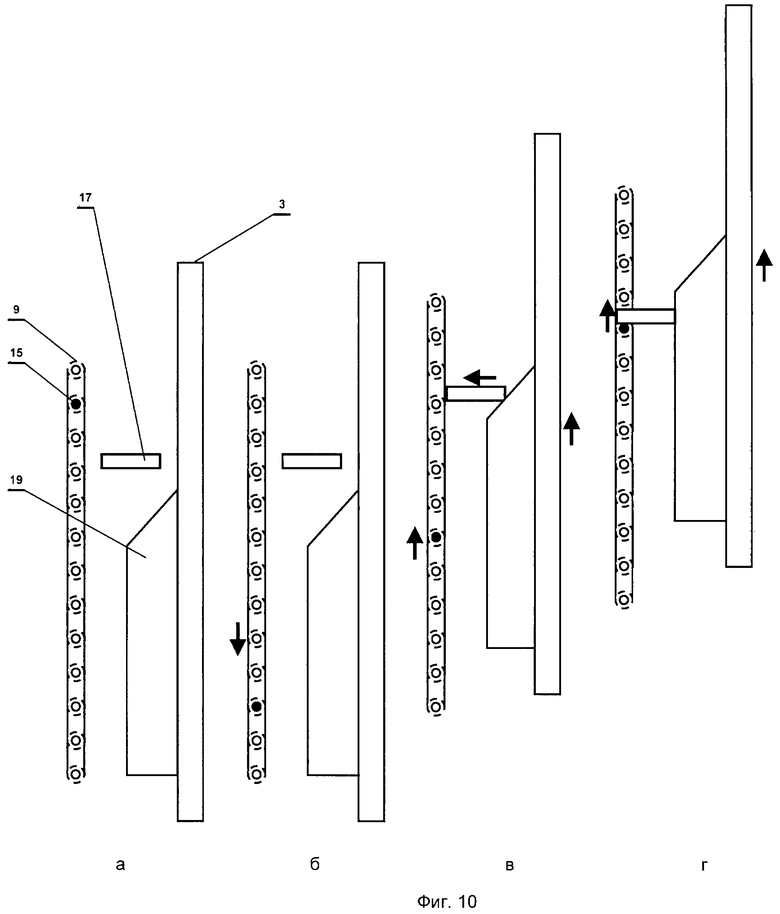
фиг.10 - пример исполнения управляемого ограничителя перемещения;
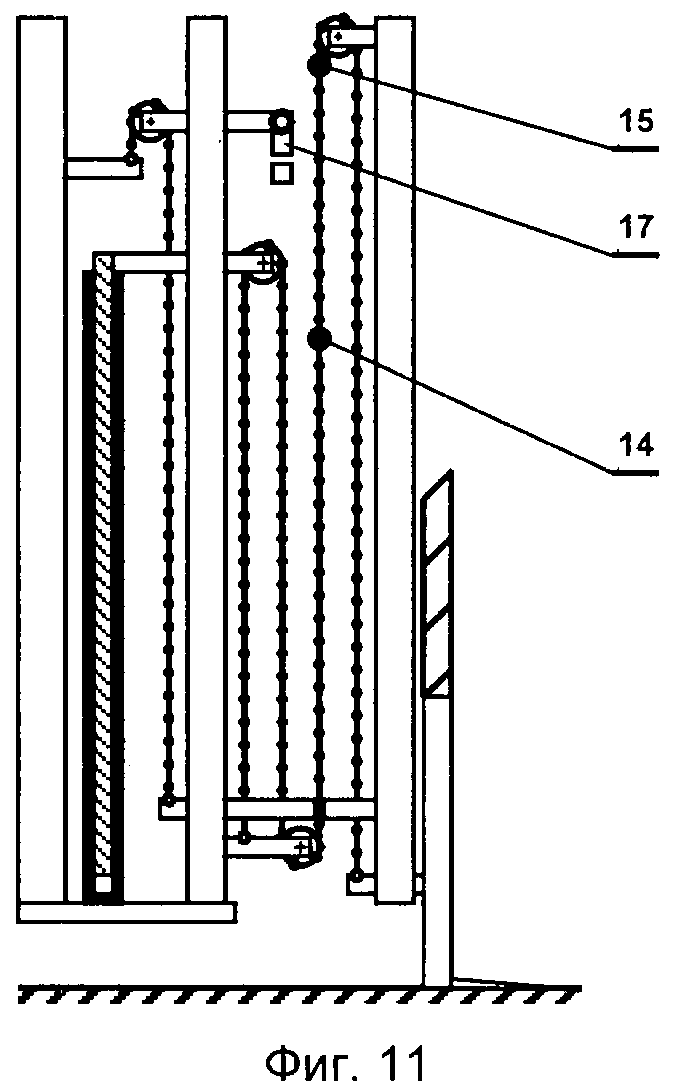
фиг.11 - грузоподъемник (по пп.1, 3 и 5 формулы изобретения) с управляемым ограничителем перемещения в исходном положении;
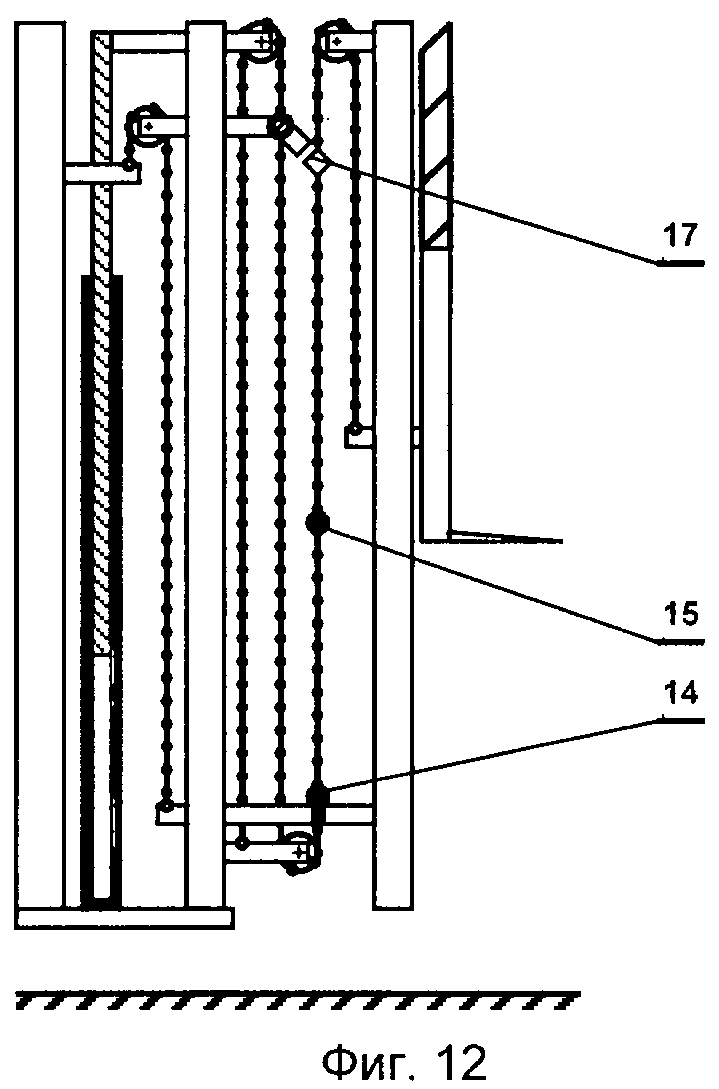
фиг.12 - то же, в конце первого этапа подъема;
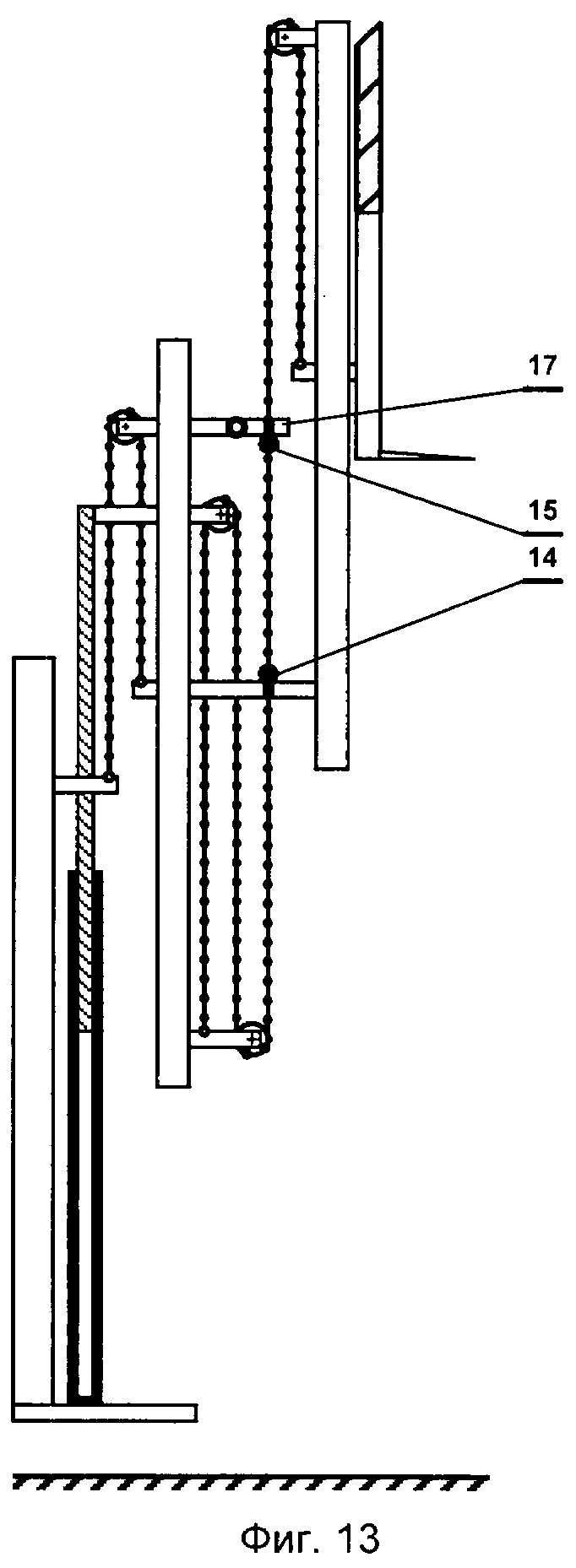
фиг.13 - то же, в конце второго этапа подъема;
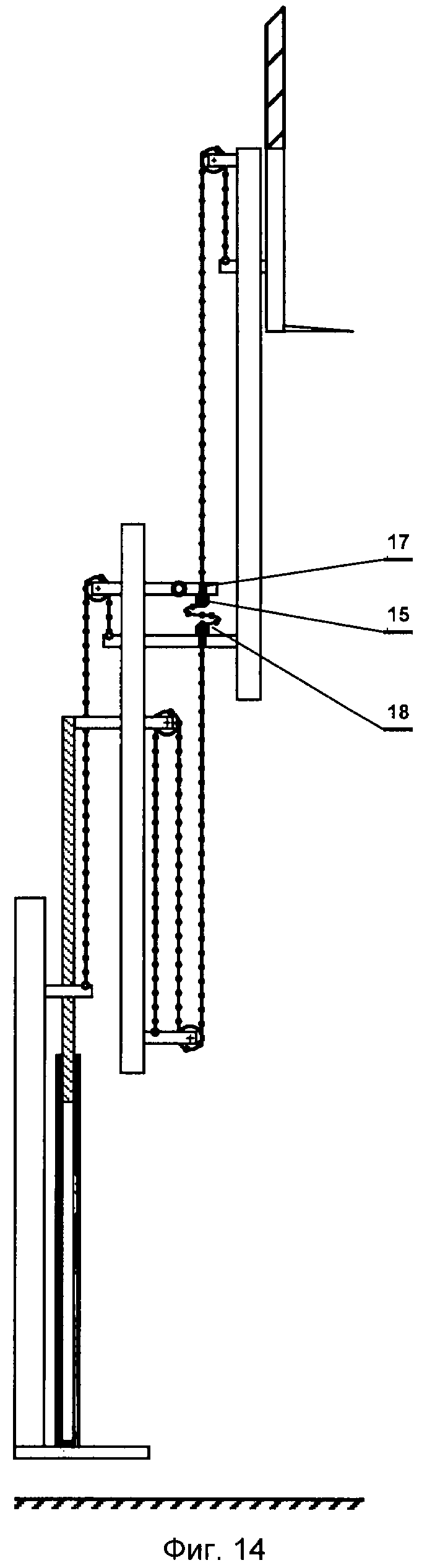
фиг.14 - то же, в конце третьего этапа подъема;
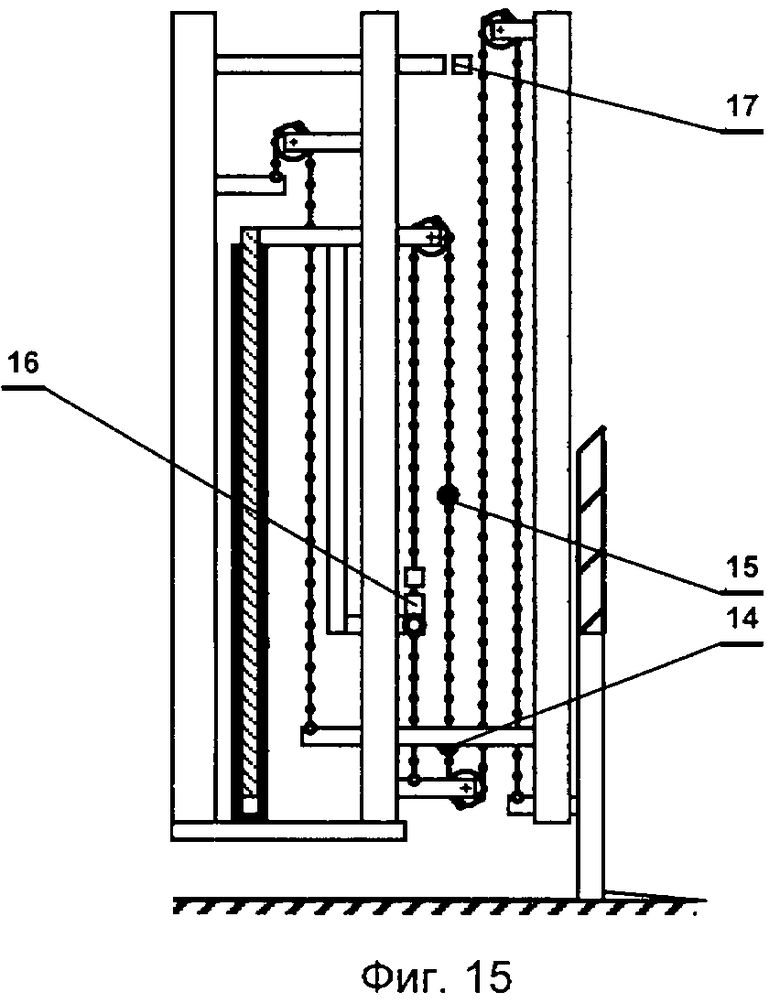
фиг.15 - грузоподъемник (по пп.1, 4 и 6 формулы изобретения);
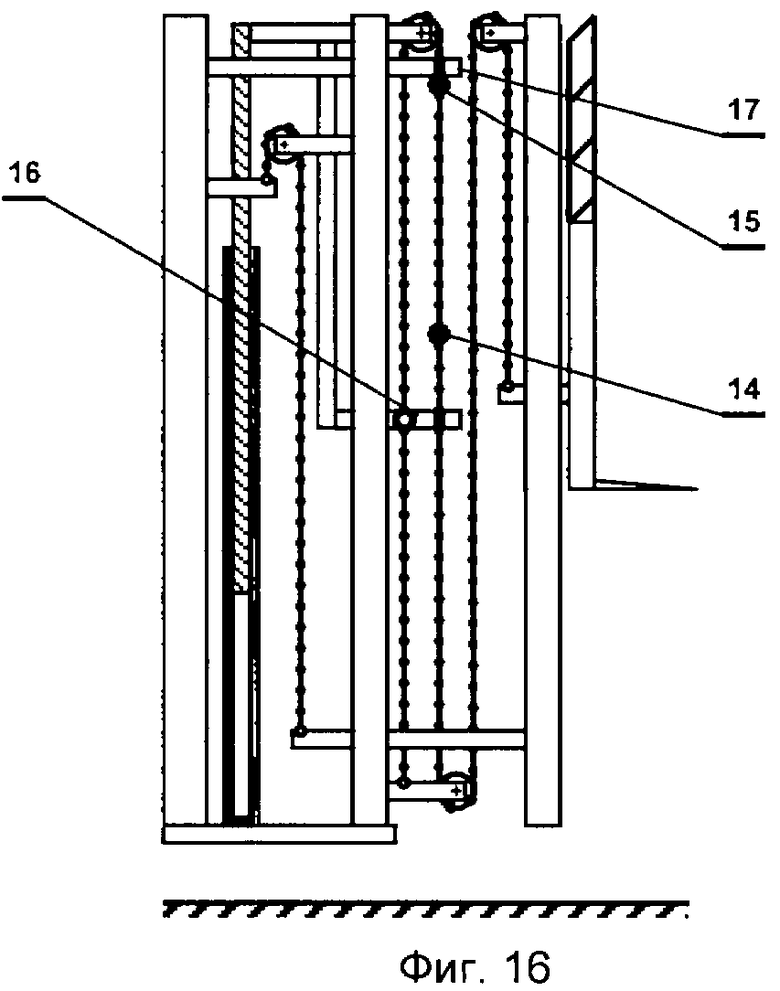
фиг.16 - то же, в конце первого этапа подъема;
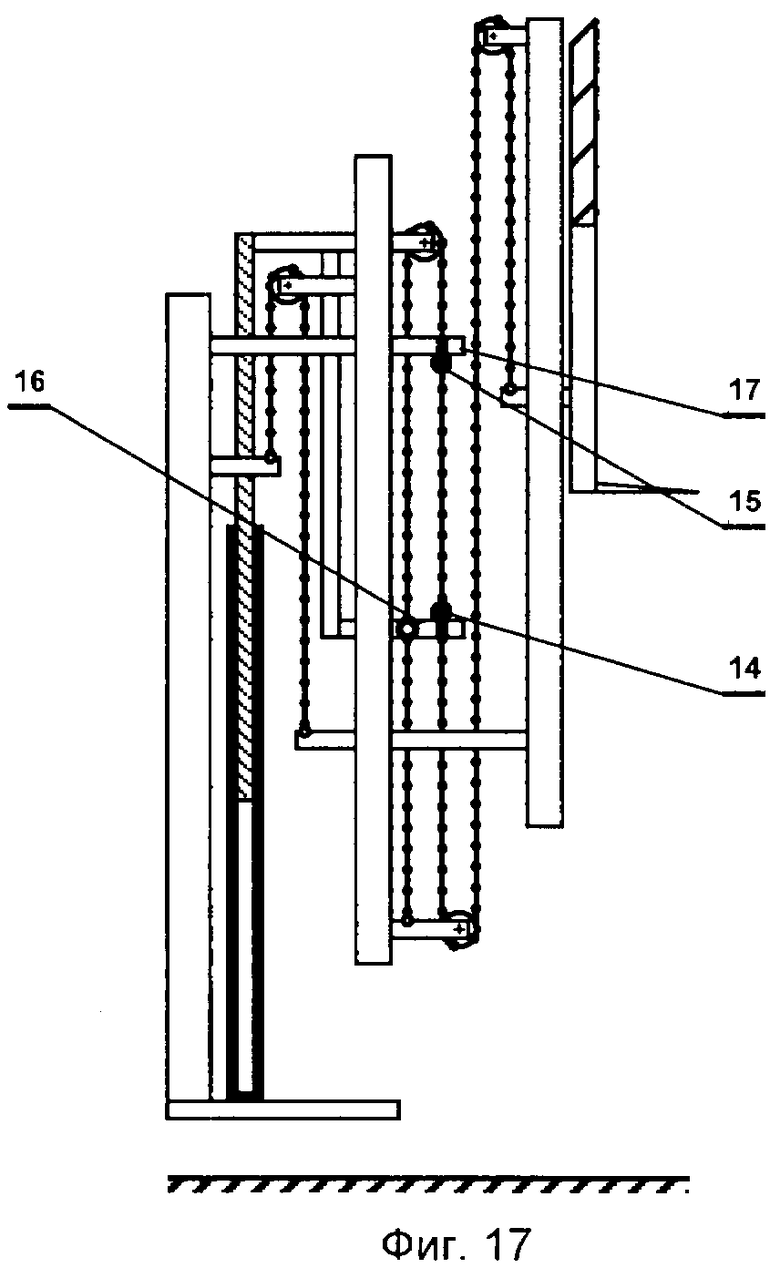
фиг.17 - то же, в конце второго этапа подъема;
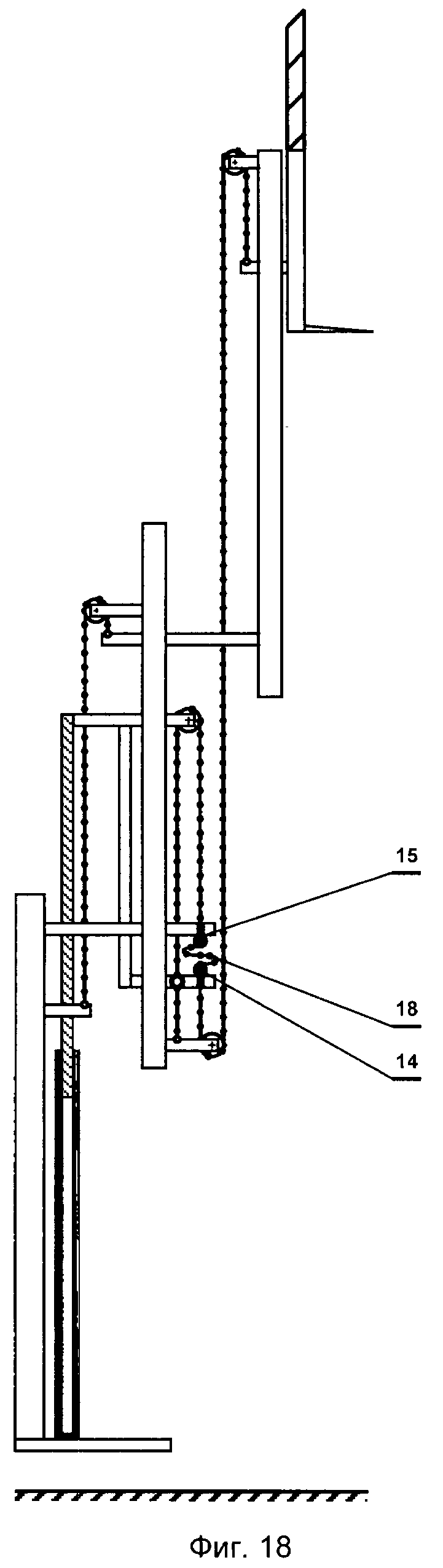
фиг.18 - то же, в конце третьего этапа подъема.
Грузоподъемник (фиг.1) содержит первую, вторую и третью секции 1, 2 и 3, грузовую каретку 4 (далее - ГК), к которой прикреплены грузозахватное приспособление (например, вилы) и решетка ограждения груза 5 (далее - РОГ), гидроцилиндр подъема 6 (далее - ЦП) с штоком 7, первый и второй гибкие тяговые элементы (далее - ГТЭ) 8 и 9, шкив ЦП 10, шкив второй секции 11, нижний шкив второй секции 12 и шкив третьей секции 13.
Секции 2 и 3 прикреплены к предыдущей секции (1 и 2 соответственно) с возможностью своего перемещения вверх;
ГК 4 прикреплена к секции 3 с возможностью своего перемещения вверх;
ЦП 6 прикреплен к секции 1;
шкивы 10-13 прикреплены, соответственно, к штоку 7, секциям 2, 2, 3;
ГТЭ 8 своими концами прикреплен к секциям 1 и 3 и огибает шкив 11;
ГТЭ 9 своими концами прикреплен к секции 2 и ГК 4 и последовательно огибает шкивы 10, 12 и 13;
ГТЭ 9 имеет первый 14 и второй 15 упоры, которые взаимодействуют с ограничителями перемещения 16 и 17, которые, в зависимости от варианта исполнения грузоподъемника, могут быть прикреплены к секциям 1, 2, 3, штоку 7.
Вариант исполнения ограничителя перемещения 16 (17) и упора 14 (15) приведен на фиг.5. Ограничитель 16 (17) выполнен в виде П-образной скобы, прикрепленной к соответствующей секции (штоку), а упором является одна из втулок звеньев цепи, в виде которой выполнен ГТЭ 9. Внутренний размер скобы ограничителя 16 больше ширины шкива штока 10, но меньше ширины втулки-упора 14.
В исходном положении шток 7 полностью вдвинут в ЦП 6, секция 2 находится в крайнем нижнем положении, опираясь на секцию 1, секция 3 находится в крайнем нижнем положении, будучи подвешена на ГТЭ 8, ГК 4 находится в крайнем нижнем положении, будучи подвешена на ГТЭ 9.
Подъем груза осуществляется в три этапа. Рассмотрим каждый этап на примере первого варианта исполнения грузоподъемника.
На первом этапе (фиг.2) шток 7 выдвигается до верхнего уровня секций. Шкив 10 выполняет функцию физического подвижного блока, вращаясь (по чертежу) против часовой стрелки и ГТЭ 9 поднимает ГК 4 вверх на величину, в два раза большую перемещения штока - до достижения РОГ 5 верхнего уровня секций. Таким образом, на первом этапе реализуется режим свободного хода - подъем груза без увеличения габаритной высоты грузоподъемника.
Секции 2 и 3 остаются неподвижными.
Рассмотрим силы, действующие на секции 2 и 3 на первом этапе (положительным считается направление вниз):


кроме того:

где Р - вес груза (с весом ГК 4 и ее элементов);
Q2 и Q3 - вес секций 2 и 3;
T8 и T9 - натяжение ГТЭ 8 и 9;
FТР.1-2 и FТР.2-3 - силы трения между секциями 1-2 и секциями 2-3;
FТР.3-К - сила трения между секцией 3 и ГК 4.
Исключая Т8 и Т9, получаем, что на первом этапе секции 2 и 3 не будут двигаться вверх при условии

Принципиально важным является наличие величины веса груза Р в левой части этого неравенства, поскольку величина FТР.К-3 зависит от Р, т.к. сила трения FТР.К-3 зависит от момента сил на ГК 4, вызванного смещением ЦТ груза относительно точки крепления ГТЭ 9 к ГК 4. При увеличении нагрузки Р одновременно растут и правая, и левая части неравенства [4].
Первый этап заканчивается в момент касания упором 14 ограничителя 16 (фиг.2). На втором этапе (фиг.3) шток 7 выдвигается дальше вверх. Шкив 10 также работает как физический подвижный блок, но вращается теперь в обратную сторону. При этом длина ветви ГТЭ 9, заключенной между точкой ее крепления к секции 2 и ограничителем 16, остается неизменной. В результате ГТЭ 9 перемещает вверх секцию 2 (в два раза быстрее, чем перемещение штока 7), а ГТЭ 8 перемещает вверх секцию 3 (в два раза быстрее, чем перемещение секции 2, т.е. в четыре раза быстрее штока 7). Длина ветви ГТЭ 9, заключенной между упором 14 и шкивом 12, уменьшается на величину, равную перемещению секции 2, а длина ветви ГТЭ 9, заключенной между шкивами 12 и 13, увеличивается на величину, равную перемещению секции 3 относительно секции 2 и равную перемещению секции 2. Поэтому ГК 4 остается неподвижной относительно секции 3 и вместе с ней и с грузом поднимается на высоту, в четыре раза большую, чем величина перемещения штока 7 на втором этапе.
Второй этап заканчивается в момент касания упором 15 ограничителя 17 (фиг.3). На третьем этапе (фиг.4) шток 7 продолжает выдвигаться дальше вверх, секции 2 и 3 перемещаются вверх так же, как они перемещались на втором этапе. Длина ветви ГТЭ 9, заключенной между точкой ее крепления к ГК 4 и упором 15, остается неизменной, что при выдвижении секции 3 относительно секции 2 приводит к перемещению ГК 4 относительно секции 3 на величину, в два раза большую величины перемещения секции 3 относительно секции 2. Таким образом, на третьем этапе ГК 4 с грузом поднимается на высоту, в шесть раза большую, чем перемещение штока 7 на этом этапе.
Участок ГТЭ 9, заключенный между упорами 14 и 15, становится на третьем этапе ненагруженным и образует петлю 18.
Опускание груза происходит в обратном порядке. При этом сначала выбирается петля 18, затем снимается нагрузка с упоров 15 и 14.
Во втором варианте (фиг.6-9) исполнения грузоподъемника ограничитель 16 прикреплен к секции 3. В момент касания упором 14 ограничителя 16 в конце первого этапа дальнейший подъем ГК 4 становится невозможным и далее происходит выдвижение секций - так же, как и в первом варианте, причем образовываемый на третьем этапе ненагруженный участок 18 ГТЭ 9 также располагается между упорами 14 и 15.
В обоих вариантах исполнения грузоподъемника на первом этапе упор 15 перемещается по направлению от ограничителя 17 на величину, равную перемещению ГК 4 на этом этапе - НГК-1, и на втором этапе упор 15 может переместиться по направлению к ограничителя 17 не более чем на ту же величину. Поэтому выдвижение секций 2 и 3 на третьем этапе не может быть больше НГК-1, а перемещение ГК 4 относительно секции 3 на третьем этапе не может быть больше чем НC-НГК-1, где НC - полный ход секции 2 (3), а суммарное перемещение - не больше чем НC. В современных грузоподъемниках ход ГК 4 больше, чем ход секций, поскольку высота каретки без учета решетки ограждения груза меньше необходимого для обеспечения жесткости конструкции перекрытия секций при их максимальном выдвижении относительно друг друга.
Для обеспечения необходимого хода ГК 4 ограничитель 17 может быть выполнен управляемым (с возможностью включения/отключения) (фиг.10). На первом этапе ограничитель 17 отключен, и упор 16 свободно перемещается мимо него. На втором этапе прикрепленный к секции 3 профилированный толкатель 19 перемещает П-образную скобу ограничителя 17 и к началу третьего этапа ограничитель 17 оказывается во включенном состоянии. При опускании груза ограничитель 17 отключается под действием пружины (на чертеже не показана). Следует заметить, что включение/отключение ограничителя 17 происходит в момент, когда он находится в ненагруженном положении. Функционирование грузоподъемника при управляемом выполнении ограничителя 17 показано на фиг.11-14.
Аналогичным образом может быть выполнен и ограничитель 15 для предотвращения взаимных помех в функционировании со шкивом 10.
Ограничитель 17 может быть прикреплен к штоку 7 (фиг.15-18). Функционирование грузоподъемника аналогично вышеописанному, однако на третьем этапе величина перемещения ГК 4 относительно секции 3 равна перемещению штока 7 на этом этапе (а не ее удвоенному значению, как в предыдущих вариантах). Поэтому отношение величин перемещения ГК 4 с грузом и штока 7 равно не 6:1, а 5:1, что при неизменном диаметре ЦП 6 и давлении в нем увеличивает грузоподъемность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2010 |
|
RU2437827C1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА (ВАРИАНТЫ) | 2011 |
|
RU2474530C2 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2005 |
|
RU2297383C2 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2009 |
|
RU2392219C1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2008 |
|
RU2363639C1 |
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| Судовое устройство для спуска и подьема груза | 1972 |
|
SU492424A1 |
| Гидроподъемник | 1988 |
|
SU1574528A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
Изобретение относится к погрузочно-транспортной технике и может быть использовано в авто- и электропогрузчиках. Грузоподъемник содержит три секции, грузовую каретку, гидроцилиндр подъема со штоком, два гибких тяговых элемента (ГТЭ), шкивы второй и третьей секций. Вторая секция, третья секция и грузовая каретка прикреплены, соответственно, к первой, второй и третьей секциям с возможностью своего перемещения вверх, гидроцилиндр подъема, шкив второй секции и шкив третьей секции прикреплены, соответственно, к первой, второй и третьей секциям, шкив второй секции и шкив третьей секции огибаются, соответственно, первым и вторым гибкими тяговыми элементами. Концы первого гибкого тягового элемента прикреплены к первой и третьей секциям, концы второго гибкого тягового элемента прикреплены к грузовой каретке и второй секции. Грузоподъемник содержит также шкив гидроцилиндра подъема, нижний шкив второй секции и два ограничителя перемещения второго ГТЭ, который имеет два упора, выполненных с возможностью взаимодействия каждый со своим ограничителем. Второй гибкий тяговый элемент последовательно огибает прикрепленный к штоку гидроцилиндра подъема шкив гидроцилиндра подъема и прикрепленный ко второй секции нижний шкив второй секции. Изобретение позволяет увеличить высоту подъема груза. 5 з.п. ф-лы, 18 ил.
1. Грузоподъемник погрузчика, содержащий три секции, грузовую каретку, два гибких тяговых элемента, гидроцилиндр подъема со штоком, шкив второй секции и шкив третьей секции, причем вторая секция, третья секция и грузовая каретка прикреплены соответственно к первой, второй и третьей секциям с возможностью своего перемещения вверх, гидроцилиндр подъема, шкив второй секции и шкив третьей секции прикреплены соответственно к первой, второй и третьей секциям, шкив второй секции и шкив третьей секции огибаются соответственно первым и вторым гибкими тяговыми элементами, концы первого гибкого тягового элемента прикреплены к первой и третьей секциям, концы второго гибкого тягового элемента прикреплены к грузовой каретке и второй секции, отличающийся тем, что содержит шкив гидроцилиндра подъема, нижний шкив второй секции и два ограничителя перемещения второго гибкого тягового элемента, который имеет два упора, выполненных с возможностью взаимодействия каждый со своим ограничителем, второй гибкий тяговый элемент последовательно огибает прикрепленный к штоку гидроцилиндра подъема шкив гидроцилиндра подъема и прикрепленный ко второй секции нижний шкив второй секции.
2. Грузоподъемник по п.1, отличающийся тем, что первый и второй ограничители перемещения второго гибкого тягового элемента прикреплены соответственно к первой и второй секции.
3. Грузоподъемник по п.1, отличающийся тем, что первый и второй ограничители перемещения второго гибкого тягового элемента прикреплены соответственно к третьей и второй секции.
4. Грузоподъемник по п.1, отличающийся тем, что первый и второй ограничители перемещения второго гибкого тягового элемента прикреплены соответственно к первой секции и штоку гидроцилиндра подъема.
5. Грузоподъемник по п.1, отличающийся тем, что первый ограничитель перемещения второго гибкого тягового элемента выполнен с возможностью своего включения/отключения.
6. Грузоподъемник по п.1, отличающийся тем, что второй ограничитель перемещения второго гибкого тягового элемента выполнен с возможностью своего включения/отключения.
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2005 |
|
RU2297383C2 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| ГРУЗОПОДЪЕМНИК ПРОМЫШЛЕННОГО ПОГРУЗЧИКА | 0 |
|
SU268257A1 |
| Грузоподъемник погрузчика | 1987 |
|
SU1631038A1 |
| US 3338335 A, 29.08.1967 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ БЕТОННЫХ ИЗДЕЛИЙ СО ВСКРЫТОЙ СТРУКТУРОЙ | 1992 |
|
RU2046706C1 |
| US 3786902 A, 22.01.1974. | |||

