/т1Ц р. Изобретение относится к промышленному транспорту, в частности, к устройствам для управления приводом вертикального перемещения кареток грузоподъемной машины и может быть использовано в конструкциях крановштабелеров. Известно устройство для управлеимя приводом вертикального перемеще ния кареток грузоподъемной машины, содержащее блок задания режимов работы двигателем и блок управления тормозом С1, Однайо известное устройство не обеспечивает экономии электроэнергии, так как не может управлять выключением двигателя при перемещении кареток, когда система неуравновеше на, т.е. одна из кареток перемещает ся под действием веса другой каретк известно устройство для управлен приводом вертикального перемещЛ1ия кареток грузоподъемной машины, соде жащее блоки задания режимов работы двигателем, блок управления тормозом и датчик уравновешенности кареток, включенный в цепь управления |двигателем С 2. Известное устройство позволяет выключать двигатель, когда каретки неуравновешены. Однако в момент, когда каретки уравновешены в малой степени или уравновешены, одна из к реток перемещается с малой скорость или же каретки не перемещаются, т.е устройство не может надежно управлять двигателем при всех возможных степенях уравновешенности.кареток. Цель изобретения - повышение надежности устройства. Поставленная цель достигается те НТО устройство для управления приво дом вертикального перемещения кареток грузоподъемной машины, содержащее блоки задания режимов работы двигателем, блок управления тормозом и датчик уравновешенности кареток, включенный в цепь управления двигат Лем, снабжено реле времени, включен ным в цепь управления двигателем па раллельно датчику уравновешенности кареток. На фиг. 1 показана грузоподъемная машина, общий вид; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4 разрез В-В на фиг.-, на фиг.5 - вид Д на фиг. 4, на фиг. б - схема устройства управления приводом вертикал ного перемещения кареток грузоподъем .ной машины. Устройство управления приводом вертикального перемещения кареток грузоподъемной машины предназначено для кранов-штабелеров, имеющих ездовую тележку 1 с вертикальной колонной 2, на которой смонтированы грузо несущая каретка. 3 и связанная с ней гибким тяговым органом 4 ( например, стальной лентой противовесная каретка 5. На каретке 5 размещен привод б вертикального перемещения кареток, который включает связанный с. двигателем приводной блок 7 и отклоняющий блок 8, взаимодействующий с гибким (ленточным) тяговым органом 9. На колонне 2 закреплен отклоняющий блок 10, а на тележке 1 - блок 11, взаимодействующие с органом 9. Один конец тягового органа 9 огибает отклоняющий 12, смонтированный на каретке 5, и прикреплен к одному балансира 13 с помощью устройства 14, другой конец органа 9 прикреплен с помощью устройства 15 к другому плечу балансира 13, который является датчиком уравновешенности кареток, на каретке 5 смонтированы конечные выключатели 16 и 17, установленные на кронштейне 18 с возможностью взаимодействия с плечами датчика-балансира 13. На каретке 5 установлена тележка 19 с тарой 20. Привод б связан с центробежным регулятором 21 скорости посредством цейной передачи 22. Он состоит из звездочки 23, соединенной валом с втулкой 24, на которой шарнирно ус тановлены грузы 25, взаш одействующие посредством рычагов 26 с прижимным диском 27, который имеет шип 28, введенный в паз 29 тормозного диска 30. Между дисками 27 и 30 установлена пружина 31. Тормозной диск 30 закреплен неподвижно на каретке 5 или размещен между колодками 32 нормально замкнутого электромагнитного тормоза 33. Привод б включает двигатель 34 и электромагнитный тормоз 351 фиг. 6 ).. Устройство управления приводом 6 содержит задакядий блок 36, блок 37 управления двигателем 34 и блок 38 управления электромагнитным тормозом 35. Блоки 37 и 38 подключены к блоку 36 независимо друг от друга (блок 38 может быть включен независимо от включения блока 37 и наоборот) . В блок входят задатчики 39 требуемого уровня перемещения грузовой каретки 3 и направления движения 40 и 41 (40 - на подъем, 41 - на опускание), датчики 42 нахождения грузовой каретки 3 на соответствующем уровне, реле 43 с контактами 43.1-43.4 Управления подъемом и реле 44 с контактами 44.1-44.4 управления опусканием. Блок 37 содержит пускатель 45 d контактами 45.1 и 54.2, пускатель 46 с контактами 46.1 и 46.2, пускатель 47 с контактами 47.1 и 47.2, пускатель 48 с контактами 48.1 и, 48.2, контакты 16.1 выключателя 16, контакты 17.1 выключателя 17, датчики 49 и 50 перехода на малую скорость двигателя 34. Блок 38 содержит пускатель -51 с контактами 51.1. В систему управления также входит реле 52 времени с контактами 52.1, замыкаемыми с выдержкой време ни 2-2,5 с, которые образуют блок 5 ограничения длительности сигналов датчика-балансира 13 с.выключателями 16 и 17. Датчик-балансир i3 является составной частью устройства управления приводом 6. В схеме предусмотрена кнопка 54 для пуска меха низма при,нахождении грузовой карет ки 3 мейоду уровнями (когда выключены контакты 42; и кнопка 55 аварийной оснастки контакты находятся в блоке 36;. Работа устройства осуществляется следующим образом. Транспортируемый груз устанавливается на каретку 3. Если она вместе с грузом тяжелее противовесной каретки 5 с установленными на ней приводом б, регулятором 21, тележкой 19, тарой 20, нагруженной противовесным грузом, то натяжение испытывает ветвь тягового органа 9, взаимодействующая через блоки 8 и 1 с ездовой тележкой 1 и с помощью устройства 15 - с балансиром 13, ус тановленным на кронштейне 18, который, поворачиваясь, воздействует другим плечом, связанным через устройство 14 с другим концом тягового органа 9, огибающего блоки 10 , на датчик 17, размыкающий свои контакта 17.1. При этом на датчик 16 балансир 13 не воздействует и контакты 16.1 замкнуты, что.говорит о неуравновешенности Mexaiнизма подъема со стороны грузовой каретки 3. В этом случае при- указании задатчиком 39 блока 36 уровня перемещения грузовой каретки 3 по колонне.2 и задатчиком 40 направления движения вверх включается реле 43, которое замыкает контакты 43.1 и 43.2 в блоке 37 управле ния, контакты 43.3 в блоке 38 управления и контакты 43.4 в блоке 53. В результате включаются контакты 45.1 и 45.2 пус кателя и двигатель 34 работает на подъем каретки 3, а стопорный тормо расторможен. При включенном двигате 34 на большую скорость электромагни тормоза 33 с колодками 32 включен и соответственно выключен ограничитель скорости. При подходе к требуе мому уровню срабатывает датчик 49, привод переходит на малую скорость за счет включения пускателя 47 и ср батывания его контактов. При подхоще точно к требуемому уровню срабатывает датчик 42 и привод останавливается. При включении задатчика 41 на движение вниз в таком состоянии срабатывает реле 44, которое за мыкает свои контакты 44.1-44.4, Так как контакты 17.1 разомкнуты, то реле 46 не включается, контакты 46.1 и 46.2 не замыкаются, а только срабатывает блок 38, пускатель 51 которого замыкает контакты 51.1 катушки 35 стопорного тормоза, растормаживая механизм подъема. Под действием силы тяжести грузовой каретки 3 система, включающая связанные тяговым органом 4 каретки 3 и 5, начинает движение к требуемому уровню. При этом цепью 22 движение передается звездочке 23 и связанной с нейвтулке 34, которая вращается с грузами 25. Последние начинают псэд действием центробежных сил расходиться и рычагами 26 воздействуют на диск 27, который, преодолевая пружину 31, поднимается к диску 30, застопоренному колодками 32, и тормозится за счет этого, ограничивая с помощью зацепления выступа 28 и .паза 29 вращение звездочки 23 и Приводного шкива 7, благодаря чему скорость пере- ( мещенйя кареток 3 и 5 не превышает допустимой величины. . При подходе к требуемому уровню срабатывает датчик 50 малой скорости, включается пускатель 48 (замыкаются контакты 45.1 и 45.2) и двигатель 34. Процесс до полной остановки происходит аналогично вьвйеуказанному. Таким образом, в данном случае энергия практически не расходуется.. Если неуравновешенность невелика, то грузовая каретка 3 при разомкнутых контактах 17.1 либо начинает слишком медленное движение, либо не движется. При включении реле 43 или 44 срабатывают контакты 43.4 или 44.4 в блоке 53 и включается реле-52, так как контакты 42 замкнуты (до тех пор пока каретка 3 не отойдет от уровня). Когда истекает время настройки реле 53 (2-2,.5 с), а контакты 42 еще не размыкаются (что говорит о слишком малой скорости перемещения), замыкаются .контакты 52.1 и 52.2 и включается блок 37 на управление двигателем 34 на большой скорости, т.е. осуществляется принудительное перемещение кареток- 3 и 5. Настройкой реле 52 добиваются необходимой производительности грузоподъемной машины в таком режиме.Если противовесная каретка 5 перевешивает грузовую каретку 3, то замыкаются контакты 17.1 и размыкаются контакты 16.1 При включении механизма на опускание грузовой каретки 3 (зсйныканием контактов задатчика 41) заданием требуемого уровня с пс ло11Ц ю зё1Датчика 39 включается реле 44, замыкающее СБОИ контакты 44.1-44.4, ко(Торые пускают двигатель 34 на опускание на большой скорости, стопор|щй тормоз растормаживается за счет подачи напряжения с помощью реле 51i в катушку 35. При подходе каретки 3 к требуемому уровню срабатывает дат чик 50, привод переходит на малую скорость за счет включения пускателем 48 и срабатывания его контактов 47.1 и 47.2. При подходе точно к требуемому уровню срабатывает дат чик 42 и привод останавливается (от ключается реле 44) . Если противовесная каретка 5 перевешивает грузовую каретку 3, т.е. замкнуты контакты 17.1 и разомкнуты контакты 16.1, то при включении задатчика 40 на подаем на требуемый уровень с помощью кнопки 39 срабатывает реле 43, зая акйющее контакты 44.1-44.4. При этом включается толь ко блок 38 (пускатель 45 не включает ся, так какразомкнуты контакты 16. и 52.1, пускатель 51 которого замыкает контакты 51.1 в цепи катушки 35 стопорного тормоза, рассматривая механизм подъема. Под действием силы тяжести противовесной каретки 5 система, включаклцая связанные тяговым органом 4 каретки 3 и 5, начинает движение к требуемому уровню. При этом цепью 22 движение передается звездочке 23 и связанной с ней втулке 24, которая вращается вместе с грузами 25. Последние под действием центробежных сил расходятся и рычагами 26 воздействуют на диск 27, который преодолевая пружину 31, поднимается к диску 30, застопоренному колодками 32 и и тормозится за счет этого, ограничивая вращение звездочки 23 и приводного шкива 7, благодаря чему скорость перемещения кареток 3 и 5 не превышает допустимой величины. При подходе к требуемому уровню срабатывает датчик 49 мало скорости, включается пускатель 47 (замыкая, контакты 48.1 и 48.2- и двигатель 34. Происходит движение на малой скорости, пока датчик 42 точной остановки не останавливает привод (размыкает цепь реле 43). При необходимости аварийной остановки механизма подъема включается кнопка 55, размыкающая цепи реле 43 и 44, в результате чего привод отключается и срабатывают тормоза. Поэтому пуск осуществляется с предвари-, тельным включением кнопки 55. Изобретение позволяет повысить надежность устройства управления приводом вертикального перемещения кареток за счет снабжения его реле времени, так как обеспечивает надежное управление приводом при различных степенях уравновешенности кареток.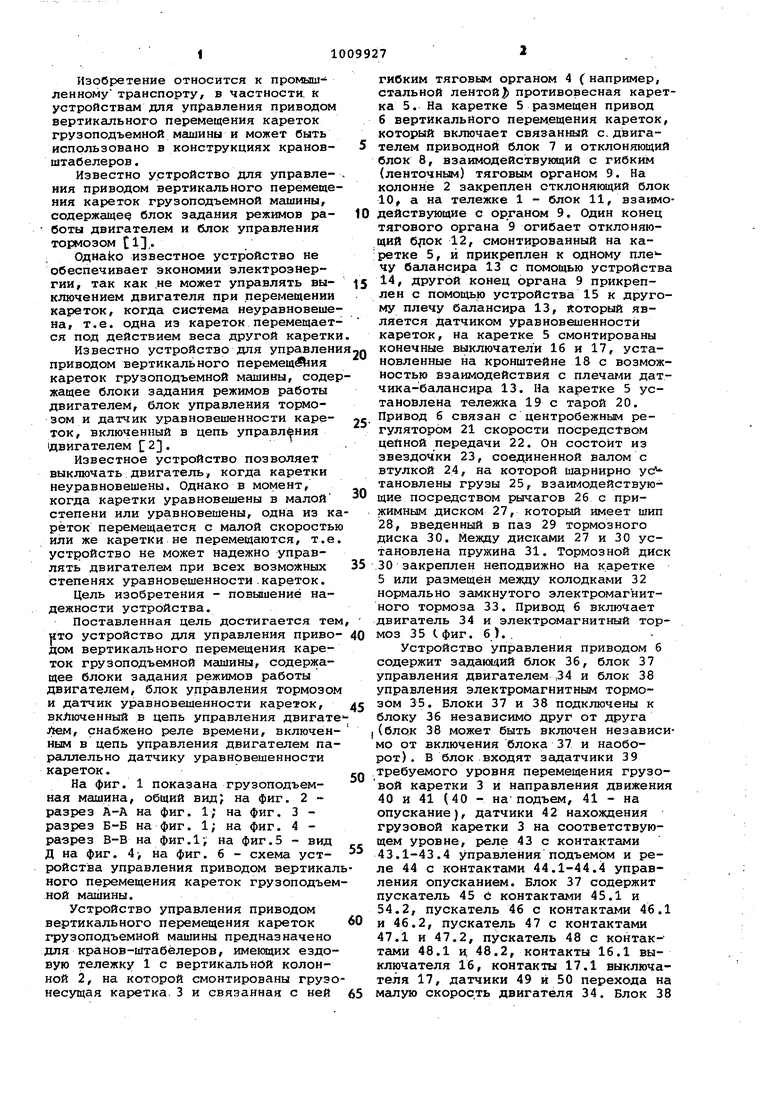



УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ КАРЕТОК ГРУЗОПОДЪЕМНОЙ МАиШНЫ, бодержащее блоки задания режимов работы двигателем, блок управления тормозом и датчик уравновешенности кареток, включенный в цепь управления двигателем, отличающееся тем, что, с целью повышения надежности, оно снабжено реле времени, включенным в цепь управления двигателем параллельно датчику уравновешенности кареток. « 4I- -, Ю to 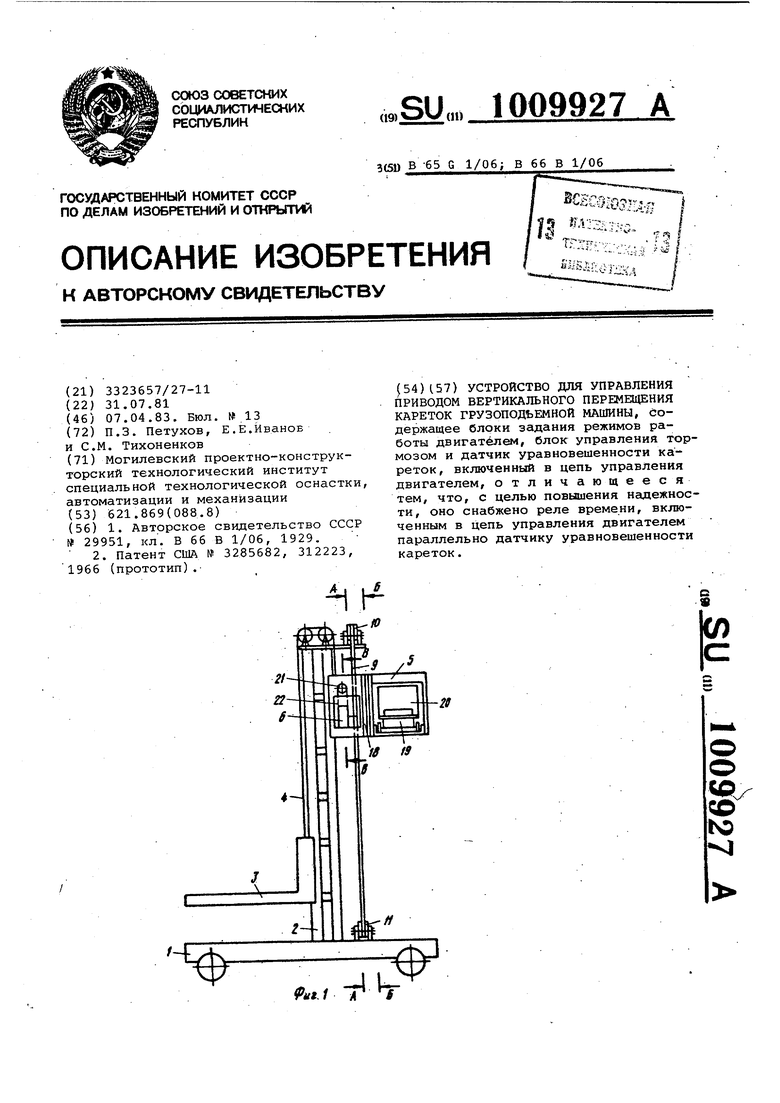
А-А
W
Фиг.
В-6
//
Фиг.З
ВиЗЛ
(риг. 5
Ш
51
пагъ
SfJ
/
г г г
-Jff
-53
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического электрического управления подъемником | 1929 |
|
SU29951A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3285682, 312223, 1966 (прототип).scscoioi jr 15 , | |||
| la .--- | |||
