Изобретение относится к устройствам отображения информации, используемым членами экипажа при пилотировании летательного аппарата (ЛА), а именно, к командно-пилотажным индикаторам (КПИ).
В процессе пилотирования ЛА пилот должен осуществлять контроль многих параметров полета и состояния разнообразных полетных систем. Для этой цели в кабине ЛА устанавливается ряд приборов, отображающих необходимую информацию.
Пилотом используется несколько режимов пилотирования ЛА, в частности, ручной и директорный. В ручном режиме пилот управляет ЛА без помощи автоматики. Для контроля траектории, которую пилот должен выдерживать, на индикатор ему индицируются отклонения от заданной траектории (например, маршрута полета или глиссады посадки), скорости и высоты. В директорном режиме автоматика рассчитывает маневры, которые требуются, чтобы удерживать ЛА на заданной траектории, а индицируемые пилоту отклонения от траектории имеют смысл команд, которым пилот должен следовать, чтобы двигаться по этой траектории.
Известны различные способы индикации пилоту отклонений от заданной траектории [1, 2].
В устройстве, представленном в [1], в нижней части центрального прямоугольника-авиагоризонта изображается шкала отклонений в горизонтальной плоскости, вдоль которой влево-вправо перемещается индекс, показывающий величину текущего отклонения. Когда отклонение от заданной траектории в горизонтальной плоскости равно нулю, индекс находится в центре шкалы и совмещается с центральной риской. На правом краю авиагоризонта изображается шкала отклонений в вертикальной плоскости, вдоль которой вверх-вниз перемещается индекс, показывающий величину текущего отклонения. Когда отклонение от заданной траектории в вертикальной плоскости равно нулю, индекс находится в центре шкалы и совмещается с центральной риской.
Пример реализации другого традиционного способа индикации отклонений от заданной траектории представлен в описании к патенту [2].
Здесь отклонение в горизонтальной плоскости индицируется вертикальной планкой на фоне авиагоризонта: чем больше отклонение, тем больше смещение планки от центра авиагоризонта - влево или вправо. Отклонение в вертикальной плоскости индицируется горизонтальной планкой, перемещающейся вверх-вниз от центра авиагоризонта. Центр авиагоризонта отмечен кружком. При отсутствии отклонений пересечение планок происходит именно в этой точке, и задачей пилота является выдерживание режима полета, при котором планки занимают такое нейтральное положение.
Пилотирование ЛА заключается в выдерживании не только заданной траектории, но и определенной скорости, величина которой зависит от многих факторов, в том числе - от этапа полета. При этом нежелательно, а в некоторых случаях - недопустимо, значительное отклонение скорости от рекомендуемой. Например, недостаточная скорость полета может привести к сваливанию ЛА в штопор, чрезмерная скорость при посадке может привести к тому, что ЛА для остановки не хватит длины взлетно-посадочной полосы, и он выкатится за ее пределы, и т.п. Поэтому пилоту приходится постоянно контролировать не только текущее положение ЛА, но и его скорость.
Традиционный способ контроля скорости заключается в том, что рядом с авиагоризонтом располагают стрелочный указатель скорости, который показывает текущую скорость и заданную скорость. При переходе на экранные индикаторы вместо отдельного указателя скорости рядом с авиагоризонтом стали индицировать отдельную шкалу скорости. Например, в устройстве [1] вертикальная шкала скорости индицируется слева от авиагоризонта. Шкала движется вверх-вниз относительно неподвижного индекса, по которому выполняют отсчет значения скорости по шкале. А заданную скорость показывает другой индекс, который как бы прикреплен к шкале в точке, соответствующей величине заданной скорости, и движется вместе с ней. Задачей пилота является совмещение этих индексов.
В устройстве [3] указатель отклонения от заданной скорости расположен на поле авиагоризонта. Относительно символа самолета перемещаются два индекса. Один из них, в виде кружка, показывает отклонение от заданной траектории, а другой, в виде скобки, двигающейся по вертикали, показывает отклонение от заданной скорости. Когда эта скобка оказывается на уровне символа самолета, это означает, что скорость самолета находится в допустимых пределах. Если же скорость слишком велика или наоборот мала, скобка оказывается, соответственно, выше или ниже символа самолета.
Такое представление информации облегчает задачу контроля скорости, но не решает проблему целиком: по-прежнему пилоту необходимо мысленно достраивать картину состояния ЛА относительно заданного режима полета по положению двух символов, причем если перемещение символа, показывающего положение заданной траектории, имеет интуитивно понятный смысл, то индикация отклонения от скорости выполнена в абстрактной форме и требует мысленной работы, как минимум, для осознания знака отклонения - чрезмерна текущая скорость или недостаточна.
В устройстве [4], являющемся наиболее близким аналогом предлагаемого изобретения, движение по заданной траектории изображается самолетиком, который не только смещается вверх-вниз относительно неподвижного символа самолета, в соответствии с ошибкой по углу тангажа, но также накреняется и смещается по горизонтали вправо-влево, в соответствии с ошибкой по углу крена. Чтобы сделать это отклонение более наглядным, самолетик одновременно с наклоном еще и смещается влево или вправо (здесь отклонение самолетика по горизонтали также определяется ошибкой по углу крена и не несет смысла бокового отклонения от заданной траектории). Задачей пилота является такое управление самолетом, при котором символ самолета повторял бы на экране эволюции самолетика. При этом два символа совместятся в центре изображения, а самолет будет двигаться по нужной траектории и с нужным креном.
Использование в данном устройстве подвижного индекса в виде самолетика, смещение которого по вертикали, накренение и смещение его по горизонтали, в соответствии с ошибками по тангажу и крену, позволяет облегчить пилоту управление ЛА, но не решает всю совокупность задач, а именно:
- предотвращение отклонения от траектории;
- предотвращение отклонения от заданной скорости.
Другая проблема, которая оставлена без рассмотрения в изобретениях-аналогах и в прототипе, - это достоверность индицируемой информации. Когда единый символ имеет несколько степеней свободы, он управляется, как минимум, двумя разными параметрами, например:
- отклонением от заданной траектории по вертикали (или директорной командой в вертикальной плоскости);
- отклонением от заданной траектории по горизонтали (или директорной командой в горизонтальной плоскости).
Эти параметры формируются независимыми аппаратными трактами. При этом может иметь место ситуация, когда один из этих трактов работоспособен и выдает достоверное значение своего параметра, а другой тракт неисправен или не готов к работе. Например, при посадке пилоту в качестве отклонения от заданной траектории индицируются отклонения от глиссады планирования по курсу и по углу места, которые определяются бортовой аппаратурой по сигналам двух установленных на аэродроме радиомаяков - глиссадного и курсового. Дальность действия глиссадного радиомаяка существенно меньше, чем курсового (18 км против 32 км), поэтому при приближении к аэродрому в течение какого-то времени курсовой тракт будет выдавать достоверное значение отклонения по курсу, в то время как отклонение по углу места из глиссадного тракта будет недостоверным.
В подобных случаях, если не принять специальных мер, индикация отклонения с помощью единого символа будет вводить пилота в заблуждение: видя, что символ не отклоняется по недостоверному параметру от нейтрального положения, он будет считать отклонение нулевым, в то время как оно может быть совершенно неприемлемым.
С другой стороны, убирать вообще символ с экрана в этой ситуации также было бы неправильно, так как при этом мы лишаем пилота и необходимой ему достоверной информации.
Задачей предлагаемого изобретения является создание такого устройства отображения информации, которое единым символом в интуитивно понятной форме показывало бы пилоту:
- заданное положение ЛА в пространстве,
- заданный крен,
- заданную скорость.
Реализация такого принципа позволит уменьшить нагрузку и облегчить работу пилота, тем самым - повысить безопасность полетов.
Другой задачей данного изобретения является создание устройства отображения информации, имеющего на экране единый символ с ясно различимыми признаками, позволяющими пилоту определить достоверность или недостоверность по каждому из управляющих символом параметров.
Техническим результатом является повышение достоверности предоставляемой пилоту информации и уменьшение риска ошибки, что в конечном счете также повышает безопасность полетов.
Командно-пилотажный индикатор содержит экран и средства для отображения на этом экране символов в соответствии с положением и состоянием летательного аппарата (ЛА), индицируемый на экране неподвижный отсчетный индекс в виде упрощенного изображения самолета при виде сзади, обозначающий текущее положение ЛА в пространстве, индицируемый на экране подвижный индекс, обозначающий требуемое положение ЛА в пространстве, имеющий симметричную, вытянутую по горизонтали форму, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и по горизонтали относительно неподвижного индекса, средства управления подвижным индексом, обеспечивающие при пилотировании ЛА перемещение указанного подвижного индекса относительно неподвижного индекса так, что при директорном режиме управление подвижным индексом осуществляется в соответствии с величиной ошибки управления по углу тангажа и поворотом его вокруг центра симметрии в соответствии с величиной ошибки управления по углу крена таким образом, что при нулевых значениях ошибок управления подвижный индекс совмещается с неподвижным, причем подвижный индекс имеет возможность изменения своих линейных размеров, и дополнительно имеются средства управления подвижным индексом, обеспечивающие в директорном режиме пилотирования ЛА перемещение подвижного индекса по горизонтали относительно неподвижного индекса в соответствии с величиной ошибки управления по курсу и изменение размеров подвижного индекса в соответствии с ошибкой управления по скорости таким образом, что при нулевых значениях ошибок управления подвижный индекс совмещается с неподвижным по положению и линейным размерам, средства управления подвижным индексом, обеспечивающие в ручном режиме пилотирования ЛА на маршруте перемещение подвижного индекса по горизонтали относительно неподвижного индекса в соответствии с величиной отклонения ЛА от заданного курса, перемещение подвижного индекса по вертикали относительно неподвижного индекса в соответствии с величиной отклонения ЛА от заданной высоты, поворот вокруг центра симметрии подвижного индекса в соответствии с величиной отклонения ЛА от заданного угла крена и изменение размеров подвижного индекса в соответствии с величиной отклонения от заданной скорости таким образом, что при нулевых значениях отклонений подвижный индекс совмещается с неподвижным по положению и линейным размерам, средства управления подвижным индексом, обеспечивающие в ручном режиме пилотирования ЛА при посадке перемещение подвижного индекса по горизонтали относительно неподвижного индекса в соответствии с величиной отклонения ЛА от глиссады планирования в горизонтальной плоскости, перемещение подвижного индекса по вертикали относительно неподвижного индекса в соответствии с величиной отклонения ЛА от глиссады планирования в вертикальной плоскости и изменение размеров подвижного индекса в соответствии с величиной отклонения от заданной скорости таким образом, что при нулевых значениях отклонений подвижный индекс совмещается с неподвижным по положению и линейным размерам.
На фиг. 1 показан вид лицевой части (экрана) устройства отображения информации, содержащего командно-пилотажный индикатор.
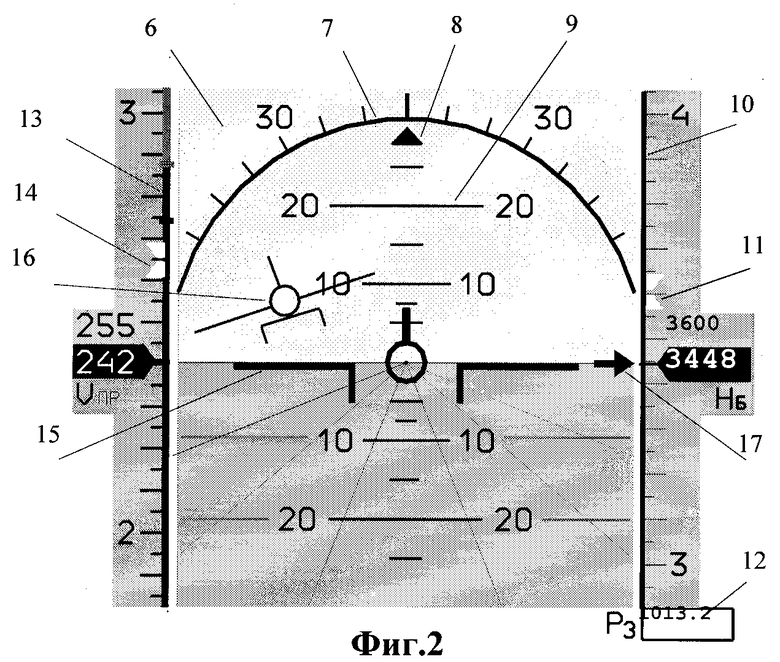
На фиг.2 показан командно-пилотажный индикатор.
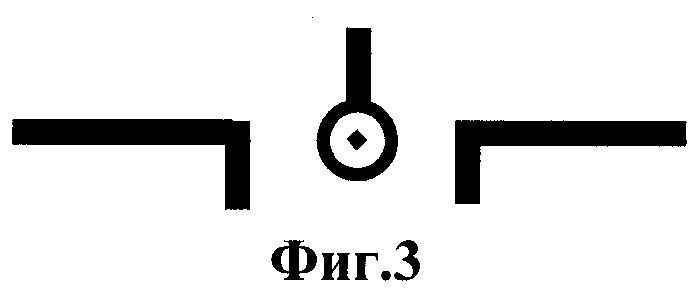
На фиг. 3 представлен отсчетный неподвижный индекс - стилизованное изображение самолета.
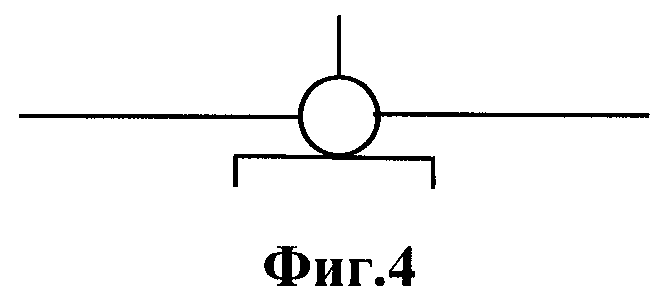
На фиг.4 представлен подвижный индекс - изображение указателя "Лидер".
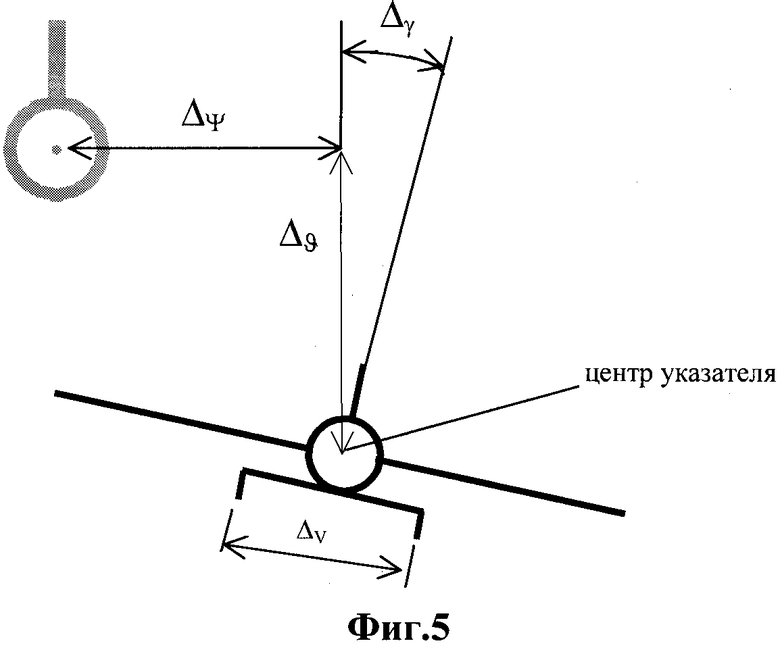
На фиг.5 показано отклонение подвижного индекса от неподвижного.
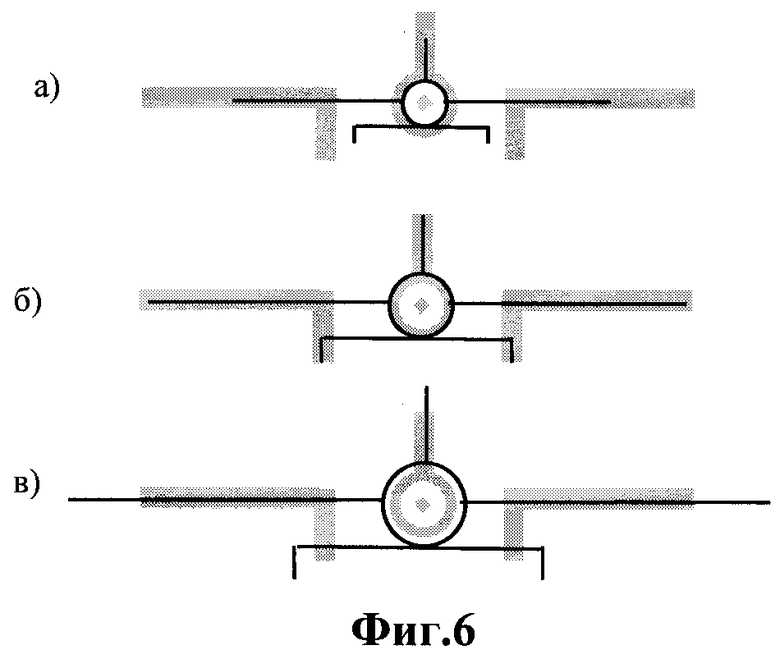
На фиг.6 показано изменение геометрических размеров указателя "Лидер" в зависимости от отклонения от заданной скорости.
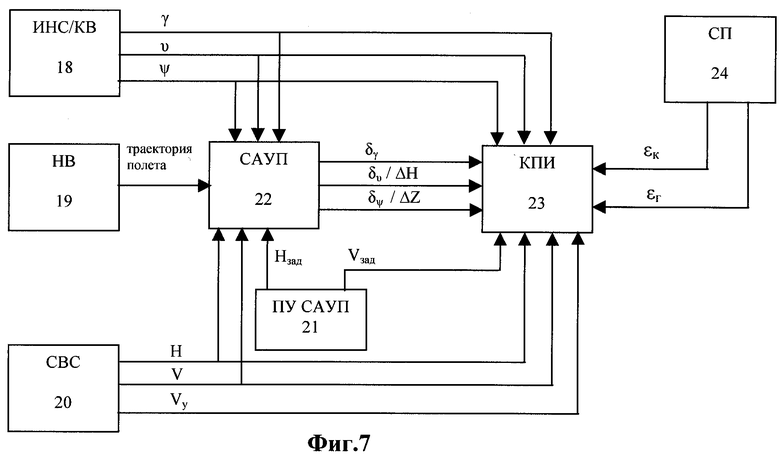
На фиг.7 представлена схема сопряжения систем ЛА с КПИ.
На фиг. 8 представлена функциональная схема командно-пилотажного индикатора.
На лицевой части экрана устройства отображения информации для пилотирования ЛА, содержащего командно-пилотажный индикатор, представлены (фиг.1):
- командно-пилотажный индикатор 1;
- шкала вертикальной скорости 2;
- индикация режимов автопилота 3;
- различная навигационная информация 4, в частности изображение планово-навигационного прибора 5 с подвижной круговой шкалой курса и стрелкой заданного направления.
Командно-пилотажный индикатор содержит (фиг.2):
- авиагоризонт 6;
- шкалу крена 7 с индексом крена 8;
- подвижную шкалу тангажа 9;
- подвижную шкалу барометрической высоты 10 с индикацией цифрового значения ("3448"), с индексом заданной высоты 11 и цифровым значением заданной высоты ("3600");
- величину давления дня 12;
- подвижную шкалу приборной скорости 13 с индикацией цифрового значения ("242"), с индексом заданной скорости 14 и цифровым значением заданной скорости ("255");
- отсчетный неподвижный индекс 15;
- директорные индексы 16 и 17.
Авиагоризонт представляет собой прямоугольник, состоящий из двух полей "Небо" и "Земля" разного цвета. Разделяющая их условная линия горизонта отражает угловое положение самолета: она поворачивается в зависимости от угла крена и в то же время перемещается по вертикали в зависимости от угла тангажа. Одновременно с поворотом и перемещением линии горизонта меняется соотношение и положение полей "Небо" и "Земля". При нулевых значениях угла крена и тангажа линия горизонта занимает горизонтальное положение посредине прямоугольника, над ней находится фон "Небо", под ней - фон "Земля". Шкала тангажа перемещается вверх-вниз в соответствии со значением угла тангажа самолета вместе с линией горизонта, которая является нулевой риской шкалы.
В центре авиагоризонта индицируется символ самолета (фиг.3). Он представляет собой стилизованное изображение самолета при виде сзади и состоит из центральной окружности, двух горизонтальных отрезков прямой и трех вертикальных отрезков прямой, причем один горизонтальный отрезок расположен слева от центральной окружности на некотором расстоянии от ее края, а другой горизонтальный отрезок расположен справа от центральной окружности на том же расстоянии от ее края, что и первый горизонтальный отрезок, первый вертикальный отрезок расположен над центральной окружностью и касается ее в верхней точке, второй вертикальный отрезок примыкает своим верхним концом к правому концу того горизонтального отрезка, который расположен слева, третий горизонтальный отрезок примыкает своим верхним концом к левому концу того горизонтального отрезка, который расположен справа.
Символ самолета неподвижен, его центр служит отсчетным индексом для шкалы тангажа, а также является тем центром, вокруг которого поворачивается авиагоризонт и относительно которого движется линия горизонта.
Заданная траектория, заданный крен и заданная скорость индицируются при помощи единого указателя "Лидер" (поз. 16 на фиг.2), этот символ представляет собой симметричную фигуру, подобную по форме символу самолета. Он состоит из четырех элементов, изображающих различные части самолета при виде сзади (фиг. 4): первая часть (фюзеляж) имеет форму окружности, вторая часть (крылья) состоит из двух горизонтальных отрезков прямой, примыкающих слева и справа к первой части, третья часть (киль) состоит из вертикального отрезка прямой, расположенного над центром первой части и касающегося одной своей стороной первой части, четвертая часть (шасси) имеет П-образную форму и расположена под первой частью симметрично относительно центра первой части.
Директорная команда по высоте индицируется индексом (поз. 17 на фиг.2), перемещающимся вверх-вниз вдоль шкалы высоты.
Основные элементы индикации сгруппированы возле двух условных линий - горизонтальной и вертикальной.
Горизонтальная линия проходит через середины счетчиков скорости и высоты. В установившемся горизонтальном полете по заданной траектории с этой линией должны совмещаться все основные подвижные элементы: линия горизонта; директорный указатель "Лидер"; директорный индекс высоты; индекс заданной скорости; индекс заданной высоты; стрелка вертикальной скорости.
Вертикальная линия проходит через центры двух символов, изображающих сам летательный аппарат: отсчетный индекс авиагоризонта и расположенный в центре шкалы курса (на фиг.1 - это символ ЛА).
В установившемся идеальном режиме полета с этой линией совмещаются все основные подвижные элементы: индекс крена; шкала тангажа; директорный указатель "Лидер"; индекс путевого угла (треугольник на внешней стороне шкалы курса, фиг. 1); стрелка заданного направления (крестообразная стрелка); стрелка азимута/курсового угла от системы радионавигации VOR или от радиокомпаса (контурная стрелка).
Величина отклонения подвижного элемента от этих двух линий служит мерой отклонения соответствующего параметра полета от установившегося идеального режима.
Указатель "Лидер":
- перемещается относительно центра символа самолета влево-вправо и вверх-вниз;
- поворачивается вокруг своего центра;
- изменяется в размерах.
По горизонтали указатель "Лидер" перемещается в соответствии с величиной отклонения от заданной траектории в горизонтальной плоскости или величиной директорной команды по курсу, обозначаемых в дальнейшем как ΔΨ (фиг.5). По вертикали указатель перемещается в соответствии с величиной отклонения от заданной траектории в вертикальной плоскости или директорной команды по тангажу/углу наклона траектории, Δϑ. При нулевых значениях отклонений ΔΨ и Δϑ центр указателя "Лидер" попадает в центр символа самолета.
Указатель "Лидер" поворачивается вокруг своего центра в зависимости от величин заданного крена или директорной команды по крену, Δγ.
Геометрические размеры указателя изменяются в зависимости от отклонения от заданной скорости ΔV. Когда скорость меньше заданной, символ "Лидер" уменьшается в размерах - "удаляется" (фиг.6,а), когда скорость больше заданной, он увеличивается в размерах - "приближается" (фиг.6,в). Когда скорость равна заданной, символ "Лидер" имеет номинальный размер, при этом он совмещается с символом самолета (фиг.6,б).
Тем самым изображается летящий перед ЛА "лидер", показывающий требуемое положение и скорость по принципу "делай как я". Когда ЛА находится на требуемой траектории, летит с требуемым креном и с заданной скоростью, указатель "Лидер" совмещается с символом самолета и по положению, и по размеру. Такая интуитивно понятная индикация упрощает пилотирование.
Указатель "Лидер" содержит четыре части:
- первую - центральную, служащую для отсчета горизонтального отклонения;
- вторую - горизонтально-ориентированную, служащую для отсчета вертикального отклонения;
- третью - вертикально-ориентированную, служащую для отсчета отклонения от заданного крена;
- четвертую - служащую для отсчета величины отклонения от заданной скорости; ее форма зависит от выбранной формы символа самолета.
Указатель может содержать и другие части, служащие изобразительным или иным целям.
В предпочтительной реализации указателя "Лидер" в виде самолетика (фиг. 4) первая часть изображается центральным кружком, вторая часть изображается горизонтальными отрезками по обе стороны кружка ("крылья"), третья часть изображается вертикальной линией над кружком ("киль"), а четвертая часть имеет вид скобки с направленными вниз концами и располагается под центральным кружком.
Изобразительные атрибуты каждой части управляются отдельно в зависимости от достоверности параметров, определяющих:
величину ΔΨ для первой части;
величину Δϑ для второй части;
величину Δγ для третьей части;
величину ΔV для четвертой части.
Атрибутами могут быть цвет этой части символа, ее мигание, форма линий (сплошная, пунктир и т.п.) и др.
В предпочтительной реализации этим атрибутом является цвет. Когда информация в трактах ΔΨ, Δϑ, Δγ, ΔV достоверна, четыре части указателя имеют один цвет, например, синий или пурпурный. При недостоверности ΔΨ первая часть указателя индицируется другим цветом, например, бледно-серым. Аналогично изменяется цвет второй части при недостоверности Δϑ, третьей части при недостоверности Δγ, четвертой части при недостоверности ΔV.
Тем самым пилоту дается предупреждение о том, что соответствующее перемещение или размер указателя "Лидер" в данный момент не отражает действительного отклонения от заданного параметра.
Источником информации для КПИ служат системы ЛА (см. фиг.7). Инерциальная навигационная система или курсовертикаль (ИНС/КВ) 18 измеряет и выдает углы крена γ, тангажа ϑ и рысканья Ψ летательного аппарата. Навигационный вычислитель (НВ) 19 содержит в своей памяти заранее введенный маршрут полета и выдает данные по траектории полета (в горизонтальной плоскости), которую нужно выдерживать. Система воздушных сигналов (СВС) 20 измеряет и выдает скорость V, высоту Н и вертикальную скорость Vy ЛА. С пульта управления системы автоматического управления полетом (ПУ САУП) 21 пилот задает требуемые высоту Нзад и скорость Vзад. В режиме директорного управления система автоматического управления полетом (САУП) 22 на основе информации о текущих параметрах полета, полученных от систем 18, 20, и требуемой траектории в горизонтальной и вертикальной плоскостях, полученной от систем 19, 21, формирует и выдает команды управления в вертикальной плоскости δϑ, горизонтальной плоскости δΨ и по крену δγ. Эти команды учитывают как величину отклонения, так и динамику ЛА. В других режимах управления ЛА система 22 выдает величины бокового отклонения от линии заданного пути ΔZ и отклонения от заданной высоты ΔН.
Командно-пилотажный индикатор принимает и отображает текущие параметры полета от систем 18, 20. По информации от пульта управления 21 и текущей скорости от системы 20 КПИ 23 вычисляет отклонение от заданной скорости ΔV. Эта величина, а также параметры, получаемые от системы автоматического управления полетом 22 и системы посадки (СП) 24, используются в КПИ для управления указателем "Лидер". В режиме посадки указатель перемещается по горизонтали в соответствии с отклонением ЛА от курса посадки εк, а по вертикали - в соответствии с отклонением ЛА от глиссады планирования εг. При полете по маршруту в режиме директорного управления указатель перемещается в соответствии с директорными командами в вертикальной и горизонтальной плоскостях δϑ, δΨ, одновременно он поворачивается в соответствии с директорной командой по крену δγ. В режиме ручного управления указатель перемещается по горизонтали в соответствии с величиной бокового отклонения от линии заданного пути ΔZ, а по вертикали - в соответствии с величиной отклонения от заданной высоты ΔН.
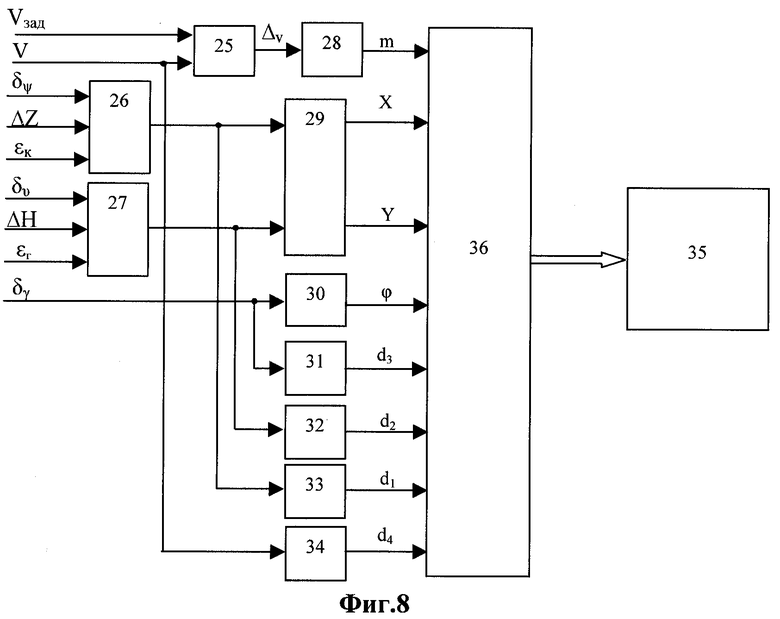
Функциональная схема командно-пилотажного индикатора по данному изобретению приведена на фиг.8.
КПИ содержит сумматор 25, мультиплексоры 26 и 27, блоки вычисления характеристик указателя "Лидер" 28, 29, 30, блоки определения достоверности входной информации 31-34, экран 35 и средства отображения на этом экране символов в соответствии с положением и состоянием ЛА - генератор символов 36. Устройство может содержать и другие элементы, выполняющие прием и обработку пилотажно-навигационной информации, используемой для управления авиагоризонтом, подвижными шкалами, указателями и другими элементами формата изображения (на фиг.8 не показаны).
Параметры, используемые для управления движением указателя "Лидер" по горизонтали, поступают на мультиплексор 26. В зависимости от режима полета мультиплексор выбирает один из этих параметров - либо директорную команду в горизонтальной плоскости δΨ, либо отклонение ЛА от курса посадки εк, либо боковое отклонение от линии заданного пути ΔZ.
Аналогично, для управления движением указателя "Лидер" по вертикали мультиплексор 27 выбирает либо директорную команду в вертикальной плоскости δυ, либо отклонение ЛА от глиссады планирования εг, либо отклонение от заданной высоты ΔН.
Выбранные значения поступают из мультиплексоров в блок вычисления положения 29, который вычисляет текущее положение указателя "Лидер" на экране, т.е. его смещение относительно символа самолета по горизонтали Х и по вертикали Y, после чего передает результаты вычисления в генератор символов 36.
Скорость ЛА V и заданная скорость Vзад поступают на сумматор 35, в котором вычисляется разность этих двух параметров - отклонение от заданной скорости ΔV. Величина отклонения поступает в блок вычисления размера 28, который в соответствии с этой величиной вычисляет масштаб индикации указателя "Лидер" m и передает этот масштаб в генератор символов 36.
Директорная команда по крену δγ поступает в блок вычисления поворота 30, который вычисляет, на какой угол ϕ следует повернуть указатель "Лидер" (с учетом направления рассогласования). Вычисленный угол передается в генератор символов (ГС) 36.
Параметры, используемые для управления указателем "Лидер", параллельно передаются в блоки определения достоверности параметров 31-34. Каждый блок анализирует значение параметра и определяет его достоверность, используя избыточность передаваемой информации и априорные знания о характере изменения параметра. Например, при передаче параметра последовательным кодом по ГОСТ 18977-79 (зарубежный аналог - стандарт ARINC 429), передаваемый код содержит дополнительные разряды, позволяющие определить состояние источника информации и правильность передачи.
Блоки определения достоверности формируют признаки достоверности четырех частей указателя "Лидер" d1-d4, которые передаются в генератор символов.
Генератор символов формирует на экране изображения символа самолета, подвижного указателя "Лидер", шкал, счетчиков и других элементов формата изображения, показанного на фиг.1. Например, в случае реализации индикатора на базе электронно-лучевой трубки (ЭЛТ), ГС при помощи отклоняющей системы задает траекторию движения луча по экрану ЭЛТ, включая в нужных точках подсвет люминофора, так что в результате на экране высвечиваются соответствующие символы. Указатель "Лидер" позиционируется генератором символов в соответствии с вычисленными координатами X, Y, масштабируется в соответствии с вычисленным масштабом m и поворачивается на угол ϕ. Способ изображения частей указателя (цвет и т.п.) выбирается генератором символов в зависимости от признаков достоверности параметров d1-d4.
Источники информации
1. Патент США 4860007.
2. Патент США 4283705.
3. Патент США 6057786.
4. Патент США 4825194.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
Изобретение относится к устройствам отображения информации, используемой членами экипажа при пилотировании летательного аппарата (ЛА), а именно к командно-пилотажным индикаторам. Командно-пилотажный индикатор содержит экран и средства для отображения на экране символов, индицируемые на экране неподвижный и подвижный отсчетные индексы в виде упрощенного изображения самолета, средства управления подвижным индексом. Подвижный индекс имеет возможность изменения своих линейных размеров. Средства управления подвижным индексом обеспечивают в директорном режиме пилотирования ЛА перемещение подвижного индекса по горизонтали относительно неподвижного индекса в соответствии с величиной ошибки управления по курсу. Средства управления подвижным индексом обеспечивают в ручном режиме пилотирования ЛА на маршруте перемещение подвижного индекса относительно неподвижного индекса по горизонтали в соответствии с величиной отклонения ЛА от заданного курса, а по вертикали - от заданной высоты, поворот вокруг центра симметрии подвижного индекса в соответствии с величиной отклонения ЛА от заданного угла крена. Средства управления подвижным индексом обеспечивают в ручном режиме пилотирования летательного аппарата при посадке перемещение подвижного индекса относительно неподвижного индекса по горизонтали в соответствии с величиной отклонения ЛА от глиссады планирования в горизонтальной плоскости, а по вертикали - в соответствии с величиной отклонения ЛА от глиссады планирования в вертикальной плоскости. Изменение размеров подвижного индекса соответствует величине отклонения от заданной скорости в данных режимах пилотирования. При нулевых значениях ошибок управления подвижный индекс совмещается с неподвижным по положению и линейным размерам. Технический результат состоит в повышении достоверности предоставляемой пилоту информации и уменьшении риска ошибки для безопасности полета. 7 з.п. ф-лы, 8 ил.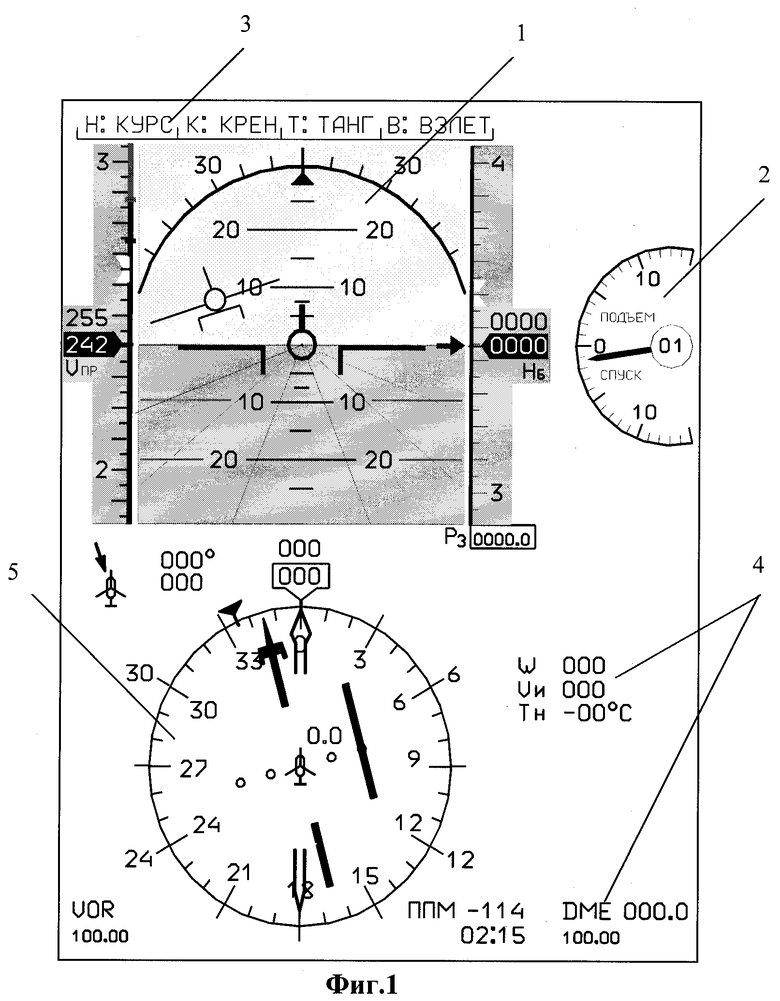
| US 4825194 A, 25.04.1989 | |||
| US 4860007 A, 22.08.1989 | |||
| US 6150960 A, 21.11.2000 | |||
| US 6057786 А, 02.05.2000 | |||
| Способ получения полиамидокислот | 1968 |
|
SU522206A1 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |

