Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании вертолетом, а именно к командно-пилотажным индикаторам (КПИ).
Наиболее близким по технической сущности к заявляемому техническому решению является «Командно-пилотажный индикатор». Патент на изобретение РФ №2474862 заявка №2011153634 приоритет изобретения 28 декабря 2011 г. МПК G01C 23/00, G05D 1/00, который состоит из экрана, на котором индицируются:
- неподвижный относительно центра индикационного поля экрана отсчетный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси ("Самолет"), индекс "Самолет" выполнен с возможностью поворота вокруг своего центра симметрии обозначающий текущее положение вертолета в пространстве;
- подвижный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси, обозначающий требуемое положение вертолета в пространстве "Лидер", имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет".
Стилизованное изображение индексов "Самолет" и "Лидер" выполнено в виде одной горизонтальной прямой символизирующей крылья летательного аппарата (ЛА) и одной вертикальной прямой символизирующей киль ЛА и пересекающей горизонтальную прямую в ее центре под прямым углом, создается в блоке генератора символов соединенном с экраном.
Средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера", на входы которых поступают сигналы из систем ЛА и снабжены блоком вычисления параметров текущего угла скольжения, блоком вычисления значения расчетного угла крена, блоком вычисления расчетного угла скольжения, блоком расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блоком вычисления значения расчетного угла тангажа, блоком расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на блок генератора символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающее перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, по углу тангажа и поворотом его вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса "Лидер" при увеличении или уменьшении соответственно заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", а выходы которых соединены с входами блока генератора символов, а также выполнен с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом оба индекса "Самолет" и "Лидер" выполнены с возможностью одновременного отображения текущего угла скольжения и угла тангажа индекса "Самолет" и отклонение от заданного угла скольжения и угла тангажа индекса "Лидер" путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индекса "Лидер".
В прототипе командно-пилотажного индикатора представленная индикация в виде отклонения текущей скорости полета ЛА от программно-заданной скорости полета визуализируется увеличением или уменьшением подобия геометрического размера фигуры индекса "Лидер" («для учета влияния текущей скорости полета ЛА величина отклонения текущей скорости полета ЛА от заданной скорости полета ΔV=(Vзад-Vтек), масштабируется и, как визуализирующий сигнал коэффициента масштаба скорости полета ЛА mV, подается в блок генератора символов (ГС) 15 для индикации увеличения или уменьшения подобия геометрического размера фигуры индекса "Лидер" 4»). «Разность скоростей ΔV=(Vзад-Vтек) определяет коэффициент масштаба скорости полета ЛА - mV. Когда текущее значение вектора скорости ЛА Утек меньше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 уменьшается в размерах - "удаляется". Когда текущее значение вектора скорости ЛА Утек больше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 увеличивается в размерах - "приближается". Когда текущее значение вектора скорости ЛА Vтек равно программно заданному вектору скорости ЛА Vзад, индекс "Лидер" 4, имеет геометрический размер равный геометрическому размеру индекса "Самолет" 5». Управляя своим вертолетом в продольной плоскости по углу тангажа, летчик наблюдает изменение геометрической фигуры угла тангажа индекса "Самолет", который индицируется на экране КПИ в виде треугольника, линия основания которого равна длине горизонтальной прямой линии символизирующей крылья ЛА, а «положение вершины треугольника соответствует текущему значению угла тангажа индекса "Самолет"».
Как видно из описания прототипа командно-пилотажного индикатора, летчику, управляющему своим вертолетом в директорном режиме ручного управления, достаточно выдерживать геометрическое подобие индекса «Самолет» с геометрическим подобием фигуры индекса «Лидер» представленных на экране КПИ, не задумываясь о числовом значении величины скорости полета ЛА на данном участке маршрута, что важно для выполнения поставленной задачи.
Однако информация о величине оборотов вала несущего винта (НВ), поступающая от двигателя вертолета в полете на данном участке маршрута, и о существующих ограничениях на пределы изменения числа оборотов вала несущего винта в полете, влияет на безопасность полета не меньше, чем параметры величины скорости, пространственного и углового положения вертолета, которые визуализируются летчику на экране КПИ.
«Существующие ограничения на пределы изменения числа оборотов вала несущего винта в полете, обусловлены требованиями к аэродинамической эффективности и управляемости, а также к прочности двигателей, трансмиссии и других систем. Поэтому принимаются специальные меры, чтобы не допустить в полете выхода числа оборотов вала несущего винта за установленные ограничения». [1]
Изменение числа оборотов вала несущего винта вертолета можно выразить функциональной зависимостью от располагаемой мощности на валу несущего винта, создаваемой двигателем (двигателями), потребной мощностью несущего винта и моментом инерции несущего винта.
nв=f (Ррасп, Рпотр, J);
где: nв - число оборотов вала несущего винта;
Ррасп - располагаемая мощность на валу несущего винта, создаваемая двигателем (двигателями).
Рпотр - потребная мощность вала несущего винта.
J - моменет инерции несущего винта.
При выполнении маневра летчик может изменить (Рпорт) потребную мощностью несущего винта на существенную величину за 1÷2 секунды.
«Так, летчик за 1÷2 секунды в полете, сбросив общий шаг до режима полетного малого газа и увеличивая угол тангажа, уменьшает потребную мощность двигателя до околонулевого значения, при этом располагаемая мощность двигателя будет уменьшаться автоматикой двигателя до режима полетного малого газа за существенно большее время. [1].» Как следствие, некоторое время в полете (Ррасп>Рпотр) располагаемая мощность на валу несущего винта, создаваемая двигателем (двигателями) будет больше потребной мощности несущего винта, что приведет, учитывая инерционность несущего винта, к раскрутке оборотов вала несущего винта.
В случае вывода из режима раскрутки оборотов вала несущего винта путем увеличения общего шага от величины полетного малого газа и уменьшения угла тангажа потребная мощность быстро возрастает, при этом располагаемая мощность двигателя будет увеличиваться автоматикой двигателя из режима полетного малого газа за существенно большее время. Как следствие, некоторое время в полете (Ррасп<Рпотр) располагаемая мощность на валу несущего винта, создаваемая двигателем (двигателями) будет меньше потребной мощности несущего винта, что приведет к просадке оборотов вала несущего винта.
«Просадка оборотов вала несущего винта может быть очень большой, поскольку выход из режима раскрутки может выполняться на малой скорости, при которой потребная мощность (Ррасп<<Рпотр) окажется существенно большей, чем при исходном установившемся полете. [1]».
Проблема раскрутки и просадки оборотов вала несущего винта при выполнении интенсивных маневров вертолета остается актуальной, в частности, и потому, что летчик должен наблюдать за показанием прибора изменения оборотов вала несущего винта (тахометра) и не допускать выхода значений оборотов вала несущего винта за установленные ограничения.
«Это усложняет пилотирование и угрожает безопасности полета, поскольку летчик, наблюдая показания приборов оборотов вала несущего винта, ослабляет контроль пространственного положения вертолета относительно земли. [1]».
Информация об оборотах несущего винта (НВ) вертолета в полете резко обостряется при возникновении особых случаев.
Жесткий дефицит времени при необходимости организации нового распределения внимания достаточного для обеспечения безопасности в этих случаях заставляет опытных летчиков заблаговременно создавать и мысленно отрабатывать различные личные способы и действия.
Так, при возникновении любых изменений обычной полетной обстановки, летчик, прежде всего, обращает внимание на обороты НВ и, если необходимо, корректирует их рычагом общего шага (ОШ) и только после этого переходит к другим разбирательствам.
Но, при приборном ручном пилотировании в сложных метеорологических условиях (СМУ) подобное отвлечение внимания от авиагоризонта, особенно при изменениях динамики полета и отстраненном расположении тахометра, очень реально могут возникать причины потери пространственного положения даже у высококлассных летчиков.
Кроме этого существуют отказы систем автоматической стабилизации оборотов НВ (хотя бы у одного из двух двигателей), приводящие к мгновенному выходу двигателя на взлетный режим, с быстрым увеличением оборотов НВ далеко за допустимые пределы с последующим срабатыванием системы защиты и автоматическим выключением двигателя, а иногда и двух.
Чтобы в этих и многих подобных им полетных ситуациях летчик-вертолетчик умел не допускать развития аварийных полетных ситуаций до катастрофических, необходимо приборную информацию о поведении оборотов НВ вынести на экран КПИ непосредственно на управляемый летчиком индекс «Самолет», то есть сделать так, чтобы информация о величине оборотов вала несущего винта (НВ), особенно при полетах в СМУ, всегда находилась в поле зрения летчика и читалась без переноса взгляда от индикационного поля экрана КПИ в положение отдельных приборов, показывающих числовое значение оборотов вала несущего винта вертолета - тахометров.
Вот это и предлагается в плане дальнейшего развития нашего пилотажного комплекса КПИ предназначенного, в конечном счете, для точного выполнения полетных задач в СМУ в ручном режиме управления с высокой степенью безопасности летчиками очень среднего уровня подготовки.
Технической задачей заявляемого изобретения является:
- повышение безопасности пилотирования летчиком вертолета за счет изображения на индикационном поле экрана КПИ индекса «Самолет» так, чтобы информация о величине оборотов вала несущего винта (НВ), особенно при полетах в СМУ, всегда находилась в поле зрения летчика и читалась без переноса взгляда от индикационного поля экрана КПИ в положение отдельных приборов, показывающих числовое значение оборотов вала несущего винта вертолета - тахометров.
- снятия психофизиологической нагрузки с летчика за счет уверенного знания оборотов вала несущего винта, так как значения оборотов вала несущего винта всегда находятся в поле зрения летчика и читаются без переноса взгляда от индикационного поля экрана;
- упрощение контроля выполнения программных режимов полета и точного выполнения полетных задач в СМУ в ручном режиме управления летчиками очень среднего уровня подготовки.
Техническая задача достигается тем, что командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс "Самолет", выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс "Лидер", выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет" и обозначающий требуемое положение в пространстве, генератор символов соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блока вычисления характеристик "Лидера" а именно: блока вычисления параметров текущего угла скольжения, блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока вычисления коэффициента скорости полета ЛА, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом, индекс "Самолет" и индекс "Лидер" выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индексом "Лидер" поворотом индекса "Лидер" вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", дополнительно снабжен блоком аналого-цифрового преобразователя, блоком вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет», блоком пропорций линий и шкалы высоты, блоком алгебраической сборки индексов, причем, редуктор двигателя по параметру аналогового значения числа оборотов вала несущего винта соединен с входом блока аналого-цифрового преобразователя, выход которого по параметру цифрового значения оборотов вала несущего винта соединен с входом блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26, с выхода которого параметр угла поворота элементов контроля числа оборотов вала несущего винта и параметры с выхода блока пропорций линий и шкалы высоты длина линии крыла индексов «Самолет/Лидер», длина линии киля индексов «Самолет/Лидер», длины линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» и длина линии равной расстоянию от центра индикационного поля экрана до нижней границы навигационного поля экрана объединяются в числовой массив в блоке системы автоматического управления полетом, с выхода которого числовой массив поступают на вход блока командно-пилотажного индикатора, в котором параметры числового массива: длина линии крыла индексов «Самолет/Лидер», длина линии киля индексов «Самолет/Лидер», длина линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» и угол поворота элементов контроля числа оборотов вала несущего винта поступают на вход блока алгебраической сборки индексов, первый выход которого по параметру геометрического образа индекса «Самолет» с элементами контроля числа оборотов вала несущего винта и второй выход по параметру геометрического образа индекса «Лидер» соединены с входом блока генератора символов, а параметр числового массива длина линии равная расстоянию от центра индикационного поля экрана до нижней границы навигационного поля экрана соединен с входом блока генератора символов, который выполнен с возможностью визуализации индекса «Самолет» с элементами контроля числа оборотов вала несущего винта, которые расположены под углом поворота элементов контроля числа оборотов вала несущего винта и визуализацией неподвижной неравномерной шкалы высоты 6 полета, индицирующей значения высоты полета ЛА от точки проекции центра индикационного поля экрана на вертикальную сторону границы экрана, вдоль вертикальной стороны границы экрана, до нижней границы экрана. Изобретение поясняется чертежами.
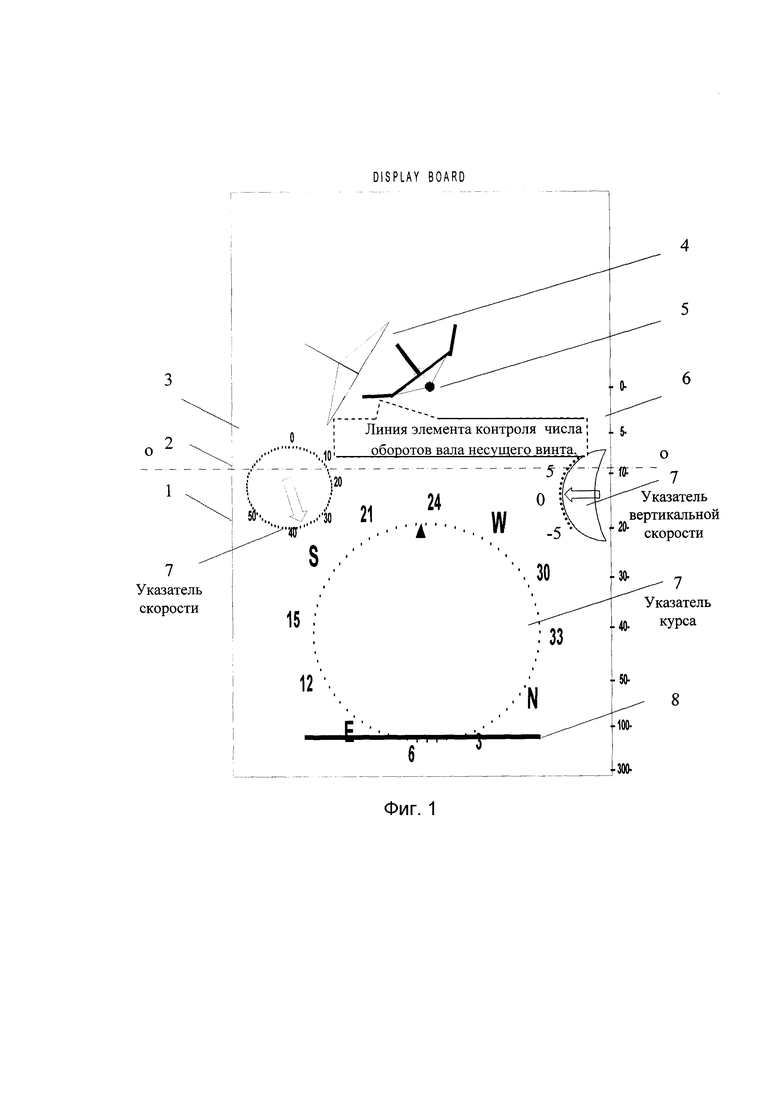
На фиг. 1 Изображен экран командно-пилотажного индикатора
На фиг. 2 Изображена схема сопряжения систем вертолета с командно-пилотажным индикатором.
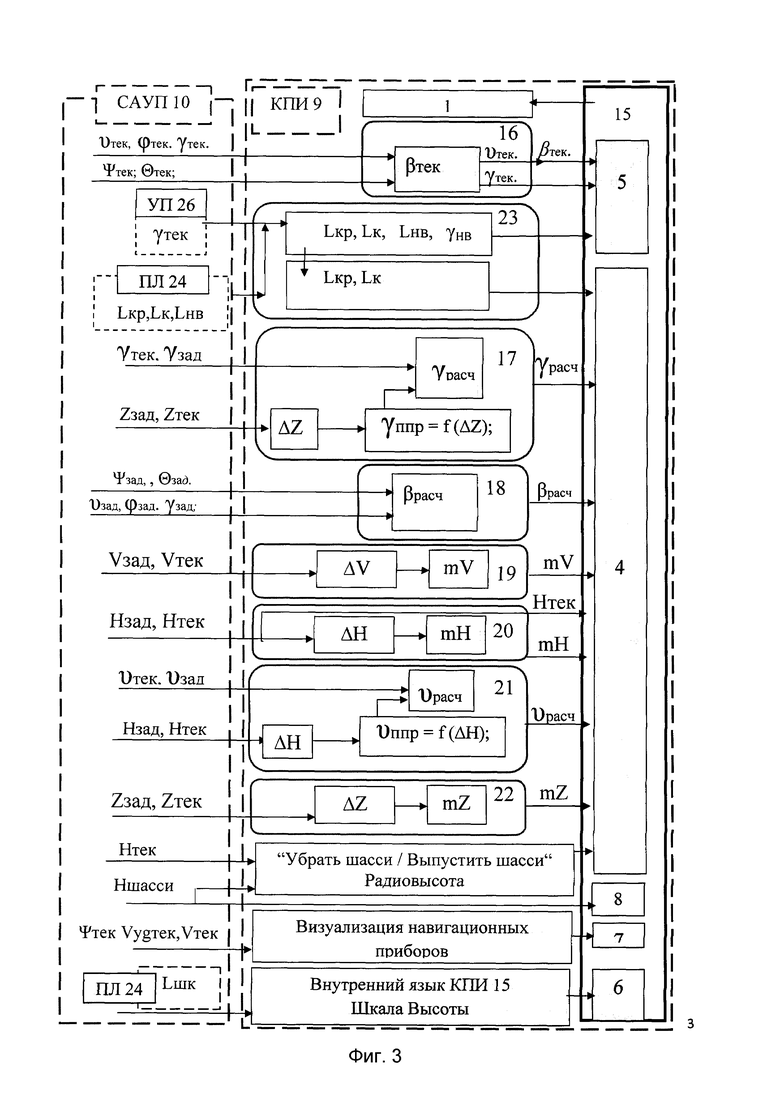
На фиг. 3 Изображена функциональная схема командно-пилотажного индикатора.
На фиг. 4 Изображена схема алгебраической сборки элементов контроля числа оборотов вала несущего винта для индекса «Самолет».
На фиг. 5 Изображена схема управления вертолетом по изображению индекса «Самолет» с элементами контроля числа оборотов вала несущего винта.
На фиг. 6 Изображена функциональная схема вычисления угла отклонения элементов контроля числа оборотов вала несущего винта в зависимости от величины оборотов вала несущего винта.
На фиг. 7 Изображен индекс «Самолет» в полете с элементами контроля числа оборотов вала несущего винта при индикации текущего угла тангажа больше нуля (υтек>0) и текущего угла скольжения равного нулю (βтек=0).
На фиг. 8 Изображен индекс «Самолет» в полете с элементами контроля числа оборотов вала несущего винта при индикации текущего угла тангажа меньше нуля (υтек<0) и текущего угла скольжения равного нулю (βтек=0).
На фиг. 9 Изображен индекс «Самолет» в полете с элементами контроля числа оборотов вала несущего винта при индикации текущего угла тангажа равного нулю (υтек=0) и текущего угла скольжения больше нуля (βтек>0).
На фиг. 10 Изображен индекс «Самолет» в полете с элементами контроля числа оборотов вала несущего винта при индикации текущего угла тангажа равного нулю (υтек=0) и текущего угла скольжения меньше нуля (βтек>0).
Заявляемый командно-пилотажный индикатор вертолета состоит из:
- экрана командно-пилотажного индикатора 1, далее экран 1, разделенного (фиг. 1) на навигационное поле 2 экрана 1 и индикационное поле 3 экрана 1;
- индицируемого на индикационном поле 3 экрана 1 подвижный индекс неуправляемый летчиком "Лидер" 4, далее "Лидер" 4, (фиг. 1) выполненного в виде стилизованного изображения летательного аппарата при виде сзади, визуализирующего отклонения ЛА относительно заданных параметров программной траектории полета, имеющего возможность поворота вокруг своего центра симметрии и свободно перемещающегося по вертикали и по горизонтали относительно центра индикационного поля 3 экрана 1;
- индицируемого на индикационном поле 3 экрана 1 подвижного индекса управляемого летчиком "Самолет" 5 с элементами контроля числа оборотов вала несущего, далее "Самолет" 5, выполненного в виде стилизованного изображения летательного аппарата при виде сзади, визуализирующего текущее угловое положение ЛА и динамику его изменения в пространстве, имеющего (фиг. 1) возможность поворота вокруг своего центра симметрии, расположенного в центре индикационного поля 3 экрана 1;
- "Лидер" 4 и "Самолет" 5 без элементов контроля числа оборотов вала несущего винта представляют (фиг. 1) стилизованную форму самолета при виде сзади, которая представлена одной горизонтальной прямой символизирующей крылья ЛА и одной вертикальной прямой символизирующей киль ЛА, причем, вертикальная прямая пересекает горизонтальную прямую в ее центре под прямым углом. "Лидер" 4 и "Самолет" 5 без элементов контроля числа оборотов вала несущего винта имеют идентичную форму и линии, образующие индексы "Лидер" 4 и "Самолет" 5 без элементов контроля числа оборотов вала несущего винта выполнены с различной толщиной и яркостью;
- индицируемой неподвижной неравномерной расположенной на вертикальной стороне границы индикационного поля 3 и навигационного поля 2 экрана 1 шкалы значения высоты 6 полета ЛА, далее шкала высоты 6 (фиг. 1) с нулевым значением высоты полета ЛА, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля 3 экрана 1;
- индицируемой на навигационном поле 2 экрана 1 (фиг. 1) различной навигационной информации текущих значений параметров полета 7 (например: указатель вертикальной скорости полета, указатель курса, указатель скорости и другие);
- индицируемого на индикационном поле 3 и навигационном поле 2 экрана 1 (фиг. 1) индекса "радиовысоты" 8, обозначающего представленное в масштабе ее реальное значение и выполненного в виде горизонтальной линии, которая перемещается в индикационном поле 3 экрана 1 по вертикали от центра симметрии "Самолета" 5 до нижней границы индикационного поля 3 экрана 1;
Для визуализации полетной информации (фиг. 2) командно-пилотажный индикатор (КПИ) 9 принимает и обрабатывает данные от системы автоматического управления полетом (САУП) 10, в которую поступают параметры полета из основных систем ЛА:
- с выхода блока системы воздушных сигналов (СВС) 11 параметры о текущем значении высоты полета ЛА (Нтек), о текущем значении вектора скорости ЛА (Vтек) и текущей проекции вектора вертикальной скорости ЛА (Vyg тек);
- с выхода блока инерциальной навигационной системы (ИНС) 12 параметры об угловом и пространственном положении ЛА (υтек, γтек, ϕтек), соответственно, текущем значении угла тангажа, текущем значении угла крена, текущем значении угла рыскания и (Хтек) - текущем значении дальности полета ЛА, (Zтек) - текущем боковом отклонении ЛА;
- с выхода блока навигационного вычислителя исходных данных (НВ ИД) 13 параметры трехмерной программной траектории полета в земной системе координат: время полета на маршруте - (Т), дальность на маршруте от точки старта - (Хзад), высота полета на маршруте - (Нзад), боковое отклонение - (Zзад), программно задаваемая высота полета ЛА на исполнение команды "убрать шасси" и команды "выпустить шасси" - (Ншасси) напрямую поступают в систему автоматического управления полетом (САУП) 10 и в навигационный вычислитель расчетных данных (НВ РД) 14, в котором они пересчитываются в дополнительно задаваемые параметры полета ЛА:
- с выхода блока навигационного вычислителя расчетных данных (НВ РД) 14, дополнительно задаваемые параметры полета ЛА поступают в систему автоматического управления полетом (САУП) 10:
- в земной системе координат (ЗСК):
Vxg зад - проекции скорости на ось Xg;
Vyg зад - проекции скорости на ось Yg;
Vzg зад - проекции скорости на ось Zg;
Θзад - угол наклона траектории ЛА;
Ψзад - угол поворота траектории ЛА
- в связанной системе координат:
γзад - угол крена,
υзад - угол тангажа,
ϕзад - угол рыскания.
- с выхода блока пропорций линий и шкалы высоты (ПЛ) 24 параметры: длина линии крыла индексов «Самолет/Лидер» (Lкр), длина линии киля индексов «Самолет/Лидер» (Lк), длина линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» (Lнв) и длина линии от центра индикационного поля 3 экрана 1 до нижнего границы навигационного поля 2 экрана 1 (Lшк).
В состав (КПИ) 9 (фиг. 2, фиг. 3) входит блок генератора символов (ГС) 15, который вырабатывает команды отображения текущих параметров полета ЛА по сигналам, поступающим из:
- блока вычисления параметров текущего угла скольжения 16;
- блока вычисления значения расчетного угла крена 17;
- блока вычисления расчетного угла скольжения 18;
- блок вычисления коэффициента скорости полета ЛА 19;
- блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20;
- блока вычисления значения расчетного угла тангажа 21;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА 22;
- блока алгебраической сборки индексов (АС) 23;
- блока пропорций линий и шкалы высоты (ПЛ) 24;
- блока аналого-цифрового преобразователя (АЦП) 25;
- блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26;
Все команды отображения, создаваемые в блоке генератора символов (ГС) 15, отображаются на навигационном поле 2 и индикационном поле 3 экрана 1 (КПИ) 9, с которого летчик считывает необходимую информацию.
Команды отображения блока генератора символов (ГС) 15 индицируют: команду "убрать шасси", команду "выпустить шасси", неподвижную неравномерную шкалу высоты 6, указатель скорости, указатель вертикальной скорости, указатель курса и другую различную навигационную информацию текущих значений параметров полета 7 ЛА, индекс "радиовысоты" 8, индекс "Лидер" 4, индекс "Самолет" 5.
Для визуализации команды "убрать шасси" и команды "выпустить шасси" для индекса "Лидера" 4 на индикационном поле 3 экрана 1 в блоке генератора символов (ГС) 15 из блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 поступает (фиг. 3) разностный сигнал текущего значение высоты полета ЛА Нтек и программно задаваемой высоты полета ЛА (Нзад=Ншасси) на исполнение команды "убрать шасси" и команды "выпустить шасси".
Для визуализации неподвижной неравномерной шкалы высоты 6 полета ЛА, расположенной на вертикальной стороне границы навигационного поля 2 и индикационного поля 3 экрана 1, из блока командно-пилотажного индикатора (КПИ) 9 передается в блок генератора символов (ГС) 15 параметр (Lшк) - длина линии равная расстоянию от центра индикационного поля 3 экрана 1 до нижней границы навигационного поля 2 экрана 1 (фиг. 1, фиг. 2, фиг. 3). В блоке генератора символов (ГС) 15 используется язык программирования для визуализации переменной шкалы высоты полета, который не является предметом изобретения и в данном случае не рассматривается.
Для визуализации указателя скорости, указателя вертикальной скорости, указателя курса и другой различной навигационной информации текущих значений параметров полета ЛА на навигационном поле 2 экрана 1 в блоке генератора символов (ГС) 15 используется язык программирования и текущие параметры полета ЛА: текущая скорость - Vтек; вертикальная скорость- Vyg тек; текущее значение угла курса - Ψтек.
Для визуализации индекса "радиовысоты" 8 на навигационном поле 2 и индикационном поле 3 экрана 1 в блоке генератора символов (ГС) 15 используется язык программирования и из блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 поступает (фиг. 3) текущее значение высоты полета ЛА (Нтек).
Для визуализации индекса "Лидер" 4 (фиг. 2, фиг. 3) на индикационном поле 3 экрана 1 в блок генератора символов (ГС) 15 поступают сигналы:
из блока вычисления значения расчетного угла крена 17 поступает значение расчетного угла крена (γрасч);
из блока вычисления расчетного угла скольжения 18 поступает значение расчетного угла скольжения (βрасч);
из блока вычисления коэффициента скорости полета ЛА 19 поступает значение коэффициента масштаба скорости полета ЛА (mV);
из блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 поступает значение коэффициента масштаба отклонения высоты полета ЛА (mН);
из блока вычисления значения расчетного угла тангажа 21 поступает значение расчетного угла тангажа (υрасч);
из блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА 22 поступает значение коэффициента масштаба бокового отклонения ЛА (mZ);
из блока пропорций линий и шкалы высоты (ПЛ) 24 параметры: длина линии крыла индексов «Самолет/Лидер» (Lкр), длина линии киля индексов «Самолет/Лидер» (Lк).
Для визуализации индекса "Самолет" 5 (фиг. 1, фиг. 2, фиг. 3) на индикационном поле 3 экрана 1 в блок генератора символов (ГС) 15 поступают сигналы:
- из блока вычисления параметров текущего угла скольжения 16 поступает (фиг. 2, фиг. 3): текущее значение угла скольжения (βтек), текущие значения угла тангажа (υтек) и текущее значение угла крена (γтек).
- из блока алгебраической сборки индексов (АС) 23 поступает геометрический образ индекса «Самолет» 5 (фиг. 4), который образован параметрами длины линии крыла (Lкр), длины линии киля (Lк), длины линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» (Lнв) поступившими с выхода блока пропорций линий индексов и шкалы высоты (ПЛ) 24 и параметром угла поворота элементов контроля числа оборотов вала несущего винта (γнв), поступившем с выхода блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26;
Параметр угла поворота элементов контроля числа оборотов вала несущего винта (γнв) обеспечивает безопасность полета вертолета при выполнении интенсивных маневров вертолета, в частности потому, что летчик должен наблюдать за показанием прибора изменения оборотов вала несущего винта (тахометра) и не допускать выхода значений оборотов вала несущего винта за установленные ограничения.
Поэтому, летчик (фиг. 1, фиг. 4) наблюдая на индикационном поле 3 экрана 1 (КПИ) 9 индекс «Самолет» 5 с элементами контроля числа оборотов вала несущего винта, которые расположены под углом поворота элементов контроля числа оборотов вала несущего винта (γнв), воздействует органами управления (ОУ) (фиг. 2) и ручкой общего шага 29 (фиг. 5), через гидроусилитель 31 на ползун автомата перекоса 32 и ручкой управления 30, через гидроусилитель 31, воздействует на тарелку автомата перекоса 33, соединенную с рычагом поворота лопасти несущего винта 35, который передает усилие на лопасти несущего винта 36, закрепленные на валу несущего винта 34, который через редуктор 28, раскручивается валом двигателя 37.
В зависимости от интенсивности маневров во время полета, угловое положение лопастей несущего винта 36 изменяется и, следовательно, изменяется их аэродинамическое сопротивление и, как следствие, изменяется соотношение между потребной мощностью (Рпотр) и располагаемой мощностью (Ррасп): - потребная мощность меньше располагаемой мощности (Рпотр<Pрасп), - потребная мощность больше располагаемой мощности (Рпотр>Pрасп), - потребная мощность соответствует располагаемой мощности (Рпотр=Ррасп).
Как следствие, с выхода (фиг. 2, фиг. 5) редуктора 28 на тахометр 27, расположенный в приборной доске ЛА, поступает аналоговое значение (nнв) числа оборотов вала несущего винта, которое одновременно поступает в блок системы автоматического управления полетом (САУП) 10 на вход блока аналого-цифрового преобразователя (АЦП) 25, с выхода которого цифровое значение числа оборотов вала несущего винта (NНВ) поступает на вход блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26, с выхода которого числовое значение параметра (γнв) угла поворота элементов контроля числа оборотов вала несущего винта дополняет массив других параметров, поступивших в блок системы автоматического управления полетом (САУЛ) 10 от основных систем ЛА. Затем, параметр (γнв) угла поворота элементов контроля числа оборотов вала несущего винта поступает в блок командно-пилотажного индикатора (КПИ) 9 на вход блока алгебраической сборки индексов (АС) 23 и через блок генератора символов (ГС) 15 выводится на индикационное поле 3 экрана 1.
Таким образом, из блока системы автоматического управления полетом (САУП) 10 вся информация необходимая летчику для управления полетом ЛА, поступает на вход блока командно-пилотажного индикатора (КПИ) 9.
Причем, летчик на экране 1 (КПИ) 9 видит одновременно текущие параметры пространственного и углового положения индекса «Самолет» 5, и величину угла поворота элементов контроля числа оборотов вала несущего винта (γнв) без переноса взгляда от экрана 1 (КПИ) 9 в положение отдельных приборов, показывающих числовое значение оборотов вала несущего винта вертолета - тахометров 27.
Летчик считывает информацию с навигационного поля 2 и индикационного поля 3 экрана 1 (КПИ) 9 и, наблюдая изменение величины угла поворота элемента контроля числа оборотов вала несущего винта (γнв), изменяет органами управления (ОУ) своего ЛА угловое положение лопастей (36) несущего винта, а, следовательно, изменяет режим работы двигателя и режим полета ЛА, что бы не допустить выхода значений оборотов вала несущего винта за установленные ограничения и не допустить развития аварийных полетных ситуаций до катастрофических.
Работа командно-пилотажного индикатора (КПИ) 9 обеспечивается необходимой исходной информацией из блока системы автоматического управления полетом (САУП) 10 (фиг. 2, фиг. 3) ЛА, в которую поступают данные о динамических и траекторных параметрах полета из блока системы воздушных сигналов (СВС) 11, блока инерциальной навигационной системы (ИНС) 12, блока навигационного вычислителя исходных данных (НВ ИД) 13, блока навигационного вычислителя расчетных данных (НВ РД) 14, блока аналого-цифрового преобразователя (АЦП) 25, блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26 и блока пропорций линий и шкалы высоты (ПЛ) 24.
Измеряемая системой воздушных сигналов (СВС) 11 информация текущих значений параметров траектории полета ЛА, образует набор данных: текущего значения высоты полета ЛА - (Нтек), текущего значения вектора скорости ЛА - (Vтек) и текущей проекции вектора вертикальной скорости ЛА - (Vyg), которые поступают в текущий момент времени в систему автоматического управления полетом (САУП) 10.
Измеряемые текущие траекторные и текущие угловые параметры полета ЛА из инерциальной навигационной системы (ИНС) 12 поступают в блок системы автоматического управления полетом (САУП) 10: текущее значение угла крена - (γтек), текущее значение угла тангажа - (υтек), текущее значение угла рыскания - (ϕтек), текущее значение дальности полета - (Хтек), текущее боковое отклонение - (Zтек).
В блок системы автоматического управления полетом (САУП) 10 ЛА также поступают данные от навигационных вычислителей, которые передают параметры опорной траектории полета и рассчитывают дополнительные навигационные параметры для обеспечения программной траектории полета ЛА. Навигационные вычислители ЛА содержат не только данные траекторных параметров полета, но и включают в себя аэродинамические характеристики ЛА, инерционно-массовые, весовые и другие параметры, от которых зависит безопасность полета и залог выполнения поставленной задачи. Эти данные важны, но не относятся к предмету изобретения и поэтому в заявляемом предложении не рассматриваются.
При визуализации индекса "Самолет" 5, учитываются не только траекторные параметры, но и параметры характеристик работы двигателя.
На индикационном поле 3 экрана 1 (КПИ) 9 (фиг. 1, фиг. 4) образ индекса «Самолет» 5, в совокупности параметров текущего углового положения (угла крена (γтек), угла тангажа (υтек), угла скольжения (βтек)), аэродинамических, инерционно-массовых характеристик и параметров характеристик работы двигателя вместе с параметром аналогового значения числа оборотов вала несущего винта (nНВ), идентичен реальному ЛА.
При визуализации индекса "Лидер" 4 учитываются аэродинамические и инерционно-массовыми характеристиками реального ЛА без образного представления о величине оборотов вала несущего винта.
Геометрические размеры индексов «Самолет»5 и «Лидер» 4: длина линии крыла индексов «Самолет/Лидер» - (Lкр), длина линии киля индексов «Самолет/Лидер» - (Lк), длина линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» - (Lнв) и длина линии от центра индикационного поля 3 экрана 1 до нижней границы навигационного поля 2 экрана 1 - (Lшк) поступают с выхода блока пропорций линий и шкалы высоты (ПЛ) 24 на вход блока системы автоматического управления полетом (САУП) 10.
Параметры опорной траектории полета ЛА поступают в программу навигационного вычислителя исходных данных (НВ ИД) 13, в виде числовых значений параметров узловых точек программно задаваемой траектории полета ЛА в земной системе координат: (Т) - время полета на маршруте, (Хзад) - дальность на маршруте от точки старта, (Нзад) - высота полета на маршруте, (Zзад) - боковое отклонение на маршруте, (Ншасси) - программно задаваемая высота полета ЛА на исполнение команды "убрать шасси" и команды "выпустить шасси".
Программно задаваемые параметры траектории полета ЛА алгоритмически обрабатываются в навигационном вычислителе исходных данных (НВ ИД) 13 и поступают в блок навигационного вычислителя расчетных данных (НВ РД) 14, где пересчитываются в дополнительно задаваемые параметры полета ЛА: - для земной системы координат (ЗСК): (Vxg зад) - проекции скорости на ось Xg, (Vyg зад) - проекции скорости на ось Yg, (Vzg зад) - проекции скорости на ось Zg, (Θзад) - угол наклона траектории ЛА, (Ψзад) - угол поворота траектории ЛА и для связанной системы координат (ССК): (γзад) - угол крена, (υзад) - угол тангажа, (ϕзад) - угол рыскания.
Параметры текущих значений траектории полета ЛА, параметры опорной траектории полета ЛА и, вычисленные дополнительно, задаваемые параметры полета ЛА представляют набор данных программно задаваемой траектории полета ЛА в функции от времени.
Программно задаваемая траектория полета ЛА в функции от времени, позволяет выдерживать на траектории полета не только пространственные, но и угловые параметры полета ЛА, которые обеспечиваются работой алгоритмов функций разностных значений программно задаваемых параметров и текущих параметров полета ЛА.
Параметры характеристик работы двигателя постоянно поступают в блок системы автоматического управления полетом (САУП) 10 от двигателя ЛА. Одним из таких параметров (фиг. 2, фиг. 5) является - параметр аналогового значения числа оборотов вала несущего винта (nНВ), который преобразуется в блоке аналого-цифрового преобразователя (АЦП) 25 в цифровое значение оборотов вала несущего винта (NНВ), с выхода которого поступает на вход (фиг. 2, фиг. 5) блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26, в котором, по функциональной зависимости γнв = F(NНВ), вычисляется угол поворота элементов контроля числа оборотов вала несущего винта: γнв - угол поворота элементов контроля числа оборотов вала несущего винта, NНВ - цифровое значение оборотов вала несущего винта.
На фигуре 6 представлен график функции угла поворота элементов контроля числа оборотов вала несущего винта (γнв) от цифрового значения оборотов вала несущего винта (NНВ).
Вдоль оси абсцисс (фиг. 6) отложено цифровое значение оборотов вала несущего винта (NНВ) от минимального значения (NНВ min) до максимального значения (NНВ max) и ему соответствующее минимальное (γнв min) и максимальное (γнв max) значение угла поворота элементов контроля числа оборотов вала несущего винта на оси ординат.
На фигуре 6 показано, что на вход блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет» (УП) 26 поступает текущее цифровое значение оборота вала несущего винта (NНВ) с выхода блока аналого-цифрового преобразователя (АЦП) 25. Вычисленное по функциональной зависимости (γнв=F(NHB)) текущее значение угла поворота элементов контроля числа оборотов вала несущего винта (γнв) поступает в блок системы автоматического управления полетом (САУП) 10, из которого текущее значение угла поворота элементов контроля числа оборотов вала несущего винта (γнв) поступает на вход блока командно-пилотажного индикатора (КПИ) 9.
Представляемый на индикационном поле 3 экрана 1 подвижный индекс управляемый летчиком "Самолет" 5 с параметрами текущего значения угла крена (γтек) и текущего значения угла тангажа (υтек) дополняется элементами контроля числа оборотов вала несущего винта (фиг. 4), которые изображаются прямыми линиями (А1В1) (А2В2) исходящими соответственно из концов крыла (А1, А2) индекса управляемого летчиком "Самолет" 5.
Таким образом, в системе автоматического управления полетом (САУП) 10 есть все параметры текущих значений траектории полета ЛА, параметры опорной траектории полета ЛА, вычисленные дополнительно, задаваемые параметры полета ЛА в функции от времени, длина линии крыла индексов «Самолет/Лидер» - (Lкр), длина линии киля индексов «Самолет/Лидер» - (Lк), длина линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» - (Lнв) и величина угла поворота элементов контроля числа оборотов вала несущего винта - (γнв), которые поступают на вход блока командно-пилотажного индикатора (КПИ) 9, чтобы своей индикацией на экране 1 обеспечить летчика необходимой информацией для надежного и безопасного управления полетом его ЛА.
Главным на борту ЛА является летчик, для которого командно-пилотажный индикатор обеспечивает индикацию надежного безопасного полета, поэтому, в систему автоматического управления полетом (САУП) 10 поступают команды от летчика анализирующего полет по визуальному представлению параметров полета на экране 1 командно-пилотажного индикатора КПИ 9.
Для этого с выхода системы автоматического управления полетом (САУП) 10, текущие и заданные параметры траектории полета ЛА, которые относятся к подвижным индексам "Лидер" 4, "Самолет" 5, "радиовысота" 8, команде "убрать шасси", команде "выпустить шасси" и параметрам для "визуализации навигационных приборов" поступают в командно-пилотажный индикатор (КПИ) 9 на функциональные блоки (16, 17, 18, 19, 20, 21, 22, 23), в которых вырабатываются параметры для работы блока генератора символов (ГС) 15 (фиг. 2), из которого поступают на индикационное поле 3 и навигационное поле 2 экрана 1 визуализированные параметры текущей траектории полета и элементы контроля числа оборотов вала несущего винта для индекса «Самолет» 5.
В командно-пилотажном индикаторе (КПИ) 9 внутренним языком программирования формируется (фиг. 2, фиг. 3) образ неподвижной неравномерной шкалы высоты 6 полета ЛА на навигационном поле 2 и индикационном поле 3 экрана 1 на вертикальной стороне границы экрана 1.
При текущей высоте полета ЛА близкой к максимальному значению неподвижной неравномерной шкалы высоты 6 полета ЛА скорость перемещения индекса "радиовысоты" 8 от нижней границы навигационного поля 2 от средины индикационного поля 3 (фиг. 1) на экране 1 практически незаметна и не отвлекает внимание летчика от выполнения поставленной ему задачи полета. Скорость перемещения индекса "радиовысота" 8 на навигационном поле 2 и индикационном поле 3 экрана 1 возрастает, если уменьшается высота полета ЛА. Чем ниже высота полета ЛА, тем быстрее индекс "радиовысота" 8 перемещается к центру индикационного поля 3 экрана 1, привлекая внимание летчика изменяющейся картиной экрана 1. Параметр быстро меняющейся высоты полета обращает внимание летчика именно на этот фактор траектории полета и формально предупреждает его о готовности к действиям, вызванным текущей высотой полета. Летчик всегда обратит внимание на перемещение индекса "радиовысота" 8, что обеспечит ему надежность и безопасность полета без стрессовых нагрузок в любых экстремальных полетных условиях при дефиците времени и внимания.
Для летчика угловое положение его ЛА на индикационном поле 3 экрана 1 идентифицируется угловым положением индекса "Самолет" 5 по параметрам углового положения ЛА в данный момент времени: текущего угла скольжения - (βтек), текущего значения угла тангажа - (υтек), текущего значения угла крена - (γтек) и величиной угла поворота элементов контроля числа оборотов вала несущего винта - (γнв).
Текущий угол скольжения (βтек) вычисляется процедурой с использованием выходных данных угловых текущих параметров траектории полета ЛА (фиг. 3), поступающих из системы автоматического управления полетом (САУП) 10: (υтек) - текущее значение угла тангажа, (γтек) - текущее значения угла крена, (ϕтек) - текущее значение угла рыскания, (Ψтек) - значение угла поворота траектории ЛА, (Θтек) - значение текущего угла наклона траектории ЛА, которые поступают в блок вычисления параметров текущего угла скольжения 16, где выходные данные угловых текущих параметров траектории полета ЛА и выходные данные текущего углового положения вектора скорости преобразуются в матрицы перехода от «связанной системы координат к земной системе координат» и от «земной системы координат к скоростной системе координат», соответственно. Процедурой перемножения матриц получается новая матрица с элементами угла атаки и угла скольжения на траектории полета ЛА в текущий момент времени. На выходе блока вычисления текущего угла скольжения 16 текущее значение угла крена - (γтек), текущее значение угла тангажа - (υтек) и текущее значение угла скольжения (βтек) используются как визуализирующие сигналы для индекса "Самолет" 5 на индикационном поле 3 экрана 1.
Геометрический образ индекса "Самолет" 5 собирается в блоке алгебраической сборки индексов (АС) 23 по поступающим параметрам длины линии крыла индексов «Самолет/Лидер» - (Lкр), длины линии киля индексов «Самолет/Лидер» - (Lк), длины линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» - (Lнв) и величине угла поворота элементов контроля числа оборотов вала несущего винта - (γНВ).
В центр поля O(Хэ,Уэ) (фиг. 4) блока алгебраической сборки индексов (АС) 23 устанавливается центр линии крыла индексов «Самолет/Лидер» - (Lкр), которая затем разворачивается под углом текущего угла крена ЛА (γтек). По известной длине линии крыла индексов «Самолет/Лидер» - (Lкр), определяется ее половина L=Lкр/2.0. По аналитическим формулам функции текущего угла крена ЛА (γтек) в координатах поля блока алгебраической сборки индексов (АС) 23, идентичного индикационному полю 3 экрана 1 (КПИ) 9, определяются координаты точек А1(Х1,У1) и А2(Х2,У2).
Из конца точки линии крыла индексов «Самолет/Лидер» - (L=Lкр/2.0) с координатами А1(Х1,У1) (фиг. 4) строится прямая линия элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 - (Lнв) под углом равным сумме (γтек+γНВ) величины текущего угла крена ЛА (γтек) и величины угла поворота элементов контроля числа оборотов вала несущего винта (γНВ). Зная координаты A1(X1,У1) начала линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5, ее длину - (Lнв) и величину угла (γтек+γНВ) по аналитическим формулам определяются координаты конечной точки линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 - (Lнв) В1(Х1,У1).
Из конца точки линии крыла индексов «Самолет/Лидер» - (L=Lкр/2.0) с координатами А2(Х2,У2) (фиг. 4) строится прямая линия элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 - (Lнв) под углом равным разности (γтек-γНВ) величины текущего угла крена ЛА (γтек) и величины угла поворота элементов контроля числа оборотов вала несущего винта (γНВ). Зная координаты А2(Х2,У2) начала линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5, ее длину - (Lнв) и величину угла (γтек-γНВ) по аналитическим формулам определяются координаты конечной точки линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 - (Lнв) В2(Х2,У2).
Из центра линии крыла индексов «Самолет/Лидер» - (Lкр) с координатами O(Хэ,Уэ), в блоке алгебраической сборки индексов (АС) 23, строится прямая линия равная длине линии киля индексов «Самолет/Лидер» - (Lк) под углом величины текущего угла крена ЛА (γтек). Координату конца точки линии киля индексов «Самолет/Лидер» - (Lк) В3(Х3,У3) определяются по аналитическим формулам.
Пример аналитических формул без отдельной фигуры: Известно: начальная точка прямой A1(X1,У1), длина прямой L, угол наклона прямой (γ).
Конечная точка координаты Х2 прямой (L) - Х2=X1+L*cos(γ).
Конечная точка координаты У2 прямой (L) - У2=У1+L*sin(γ).
Координаты конечной точки прямой (L) В(Х2,У2)
При положительном значении угла поворота элементов контроля числа оборотов вала несущего винта (γНВ>0) линия элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 (Lнв) из точки (A1) достраивается по часовой стрелки, а линия элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 (Lнв) из точки (А2) достраивается против часовой стрелки.
При отрицательном значении угла поворота элементов контроля числа оборотов вала несущего винта (γНВ<0) линия элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 (Lнв) из точки (A1) достраивается против часовой стрелки, а линия элемента контроля числа оборотов вала несущего винта для индекса «Самолет» 5 (Lнв) из точки (А2) достраивается по часовой стрелки.
Индекс "Лидер" 4 индицируется на индикационном поле 3 экрана 1 для текущего момента времени расчетным значением угла крена - (γрасч), расчетным значением угла тангажа - (υрасч) и расчетным значением угла скольжения - (βрасч).
Величина угла крена индекса "Лидер" 4 вычисляется как сумма текущего значения угла крена ЛА управляемого летчиком - (γтек), программно заданного угла крена ЛА на маршруте полета - (γзад) и поправочного значения угла крена - (γппр), которое зависит от величины бокового отклонения ЛА от заданной траектории полета.
Для этого в блок вычисления значения расчетного угла крена 17 из системы автоматического управления полетом (САУП) 10 поступают: (γтек) - текущее значение угла крена, (Zтек) - текущее боковое отклонение, (γзад) - заданное значение угла крена, (Zзад) - боковое отклонение задаваемой координаты в программе полета ЛА. Значение вычисленного бокового отклонения траектории ЛА ΔZ=(Zтек-Zзад) поступает в функцию вычисления поправочного значения угла крена (γппр). Сумма текущего значения угла крена - (γтек), заданного угла крена - (γзад) и поправочного значения угла крена - (γппр) - есть значение расчетного угла крена γрасч=(γ +γзад+γппр), которое передается в блок генератора символов (ГС) 15 (фиг. 3), как визуализирующий сигнал на подвижный неуправляемый летчиком индекс "Лидер" 4 в индикационное поле 3 экрана 1.
Визуализируемое для индекса "Лидер" 4 расчетное значение угла скольжения - (βрасч) поступает из блока вычисления расчетного угла скольжения 18, в который от системы автоматического управления полетом (САУП) 10 поступают входные данные программно заданного углового положения ЛА на траектории: (γзад) - угол крена, (υзад) - угол тангажа, (ϕзад) - угол рыскания и входные данные программно заданных значений углов пространственного положения вектора скорости ЛА (Ψзад) - угол поворота траектории ЛА и (Θзад) - угла наклона траектории ЛА. Поступившие входные данные преобразуются в матрицы перехода от «связанной заданной программно системы координат к земной системе координат» и от «земной системы координат к скоростной заданной программно системе координат», соответственно. В результате процедуры перемножения матриц получаем новую матрицу с расчетными элементами заданных программно углов атаки и углов скольжения на траектории полета ЛА для заданного момента времени. Значение (βрасч) - значение расчетного угла скольжения заданного программно используем как визуализирующий сигнал для индекса "Лидер" 4 в индикационном поле 3 экрана 1.
Для учета влияния текущей скорости полета ЛА выходные данные (Vзад) - заданного программно значения вектора скорости ЛА и (Vтек) - текущего значения вектора скорости ЛА от (фиг. 3) системы автоматического управления полетом (САУП) 10, поступают в блок вычисления коэффициента масштаба скорости полета ЛА 19, где величины выходных данных сравниваются. Величина отклонения текущей скорости полета ЛА от заданной скорости полета ΔV=(Vзад-Vтек), масштабируется и, как визуализирующий сигнал коэффициента масштаба скорости полета ЛА (mV), подается в блок генератора символов (ГС) 15 для индикации увеличения или уменьшения подобия геометрического размера фигуры индекса "Лидер" 4.
Для визуализации на индикационном поле 3 экрана 1 отклонения ЛА от программно заданной траектории полета, на индекс "Лидер" 4 подается отклонение по высоте, пропорциональное коэффициенту масштаба отклонения по высоте полета ЛА (mН), который вычисляется в блоке расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20, по выходным данным: (Нзад) - заданной программно высоте полета ЛА на маршруте и (Нтек) - текущего значения высоты полета ЛА (фиг. 3), поступающие от блока системы автоматического управления полетом (САУП) 10. Заданная программно высота полета ЛА на маршруте и текущее значение высоты полета ЛА сравниваются. Отклонение ЛА на траектории по высоте полета ΔН=(Нзад-Нтек) масштабируется (фиг. 3) в параметр коэффициента масштаба отклонения высоты полета ЛА (mН) и, как управляющий сигнал коэффициента масштаба отклонения (mН), поступает в блок генератора символов (ГС) 15 для выработки пространственного положения на индикационном поле 3 экрана 1 масштабного отклонения индекса "Лидер" 4 относительно центра O(Хэ,Уэ) индикационного поля 3 экрана 1 (фиг. 1).
Величина отклонения ЛА на траектории по высоте полета ΔН=(Нзад-Нтек) компенсируется параметром расчетного угла тангажа (υрасч), который является одним из факторов возникающих отклонений. Для того чтобы получить расчетный угол тангажа, из блока системы автоматического управления полетом (САУП) 10 значения: (υзад) - заданного угла тангажа, (Нзад) - заданной программой высоты полета на маршруте, (υтек) - текущего угла тангажа ЛА, (Нтек) - текущей высоты полета ЛА поступают на вход блока вычисления значения расчетного угла тангажа 21, в котором вычисленное отклонение ЛА по высоте полета ΔН=(Нтек-Нзад) поступает на обработку функции для расчета поправочного значения угла тангажа (υппр). Сумма текущего значения угла тангажа (υтек), заданного угла тангажа (υзад) и поправочного значения угла тангажа (υппр) - есть значение расчетного угла тангажа (υрасч=(υтек+υзад+υnnp), которое передается в блок генератора символов (ГС) 15 (фиг. 3), из которого значение расчетного угла тангажа (υрасч), в качестве визуализирующего сигнала, поступает на подвижный неуправляемый летчиком индекс "Лидер" 4.
Визуализируемая фигура индекса "Лидер" 4 для текущего момента времени полностью представляет на индикационном поле 3 экрана 1 задаваемое программно угловое положение на траектории полета ЛА по данным параметров расчетных значений углов: расчетное значение угла крена - (γрасч), расчетное значением угла тангажа - (υрасч) и расчетное значение угла скольжения - (βрасч).
Для вычисления отклонения ЛА в боковом направлении от программно заданной траектории полета, выходные данные блока системы автоматического управления полетом (САУП) 10 (фиг. 3) (Zзад) - боковое отклонение задаваемой программно координаты полета ЛА и (Zтек) - текущее боковое отклонение траектории полета ЛА поступают в блок расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА 22, в котором величины выходных данных сравниваются. Боковое отклонение траектории ЛА (ΔZ=Zзад-Zтек) масштабируется в значение коэффициента масштаба бокового отклонения ЛА (mZ). В качестве управляющего сигнала коэффициент масштаба отклонения (mZ) передается в блок генератора символов (ГС) 15 для выработки положения масштабного отклонения индекса "Лидер" 4, визуализируя масштаб (ΔZ) бокового отклонения траектории ЛА относительно центра О(Хэ,Уэ) индикационного поля 3 экрана 1 (фиг. 1, фиг. 3).
Визуализация на индикационном поле 3 экрана 1 отклонения ЛА в боковом направлении от программно заданной траектории полета дополняет индикационную картину пространственного отклонения ЛА, углового отклонения и скоростного отклонения на траектории маршрута, что обеспечивает летчику уверенность, надежность и безопасность в полете даже в экстремальных условиях при дефиците времени и внимания.
Предлагаемый командно-пилотажный индикатор, сохраняя надежность и безопасность летчика в полете, в соответствии с предлагаемой схемой сопряжения систем ЛА с блоком командно-пилотажного индикатора (фиг. 2) и функциональной схемой блока командно-пилотажного индикатора (фиг. 3), позволяет исполнять команды напоминания о выполнении каких-либо процедур полета.
Например: после взлета на высоте большей, чем (Ншасси) выполнить команду "убрать шасси", а перед посадкой на высоте меньшей, чем (Ншасси) - выполнить команду "выпустить шасси".
Для этого выходной параметр блока системы автоматического управления полетом (САУП) 10, полученный от навигационного вычислителя исходных данных (НВ ИД) 13, в виде признака траектории полета ЛА со значением (Ншасси) - максимальная высота полета ЛА с выпущенными шасси, на которой летчику напоминается, что на взлете при условии (Нтек>Ншасси) необходимо исполнить команду «убрать шасси», на траектории посадки при условии (Нтек<Ншасси) необходимо исполнить команду «выпустить шасси». Максимальная высота полета ЛА с выпущенными шасси (Ншасси) и текущее значение высоты полета ЛА (Нтек) полученное от системы воздушных сигналов (СВС) 11, сравниваются и, когда текущая высота полета ЛА на траектории посадки (Нтек) будет меньше программно задаваемой высоты полета ЛА на траектории с выпущенными шасси (Ншасси), визуализирующая команда "выпустить шасси" подается из блока генератора символов (ГС) 15 в индикационное поле 3 экрана 1 на индекс "Лидер" 4.
Команда "выпустить шасси" индицируется в виде двух линий, которые возникают под горизонтальной линией, символизирующими крылья стилизованного ЛА индекса "Лидер" 4.
Летчик, наблюдая на индикационном поле 3 экрана 1 индекс "Лидер" 4 с визуализированной командой напоминания "убрать шасси" на взлете и "выпустить шасси" перед посадкой, всегда будет застрахован от случая летать с выпущенными шасси и никогда не совершит посадку ЛА с аварийными последствиями без выпушенных шасси.
Индицированная на индикационном поле 3 экрана 1 команда напоминания индекса "Лидер" 4 о положении шасси на траектории полета ЛА отрабатывается летчиком из кабины включением тумблера с позицией "выпустить шасси" или "убрать шасси". Выбранная летчиком команда передается в блок системы автоматического управления полетом (САУП) 10, затем в командно-пилотажный индикатор (КПИ) 9 и в блок генератора символов (ГС) 15 на индекс "Самолет" 5, тем самым визуализируя выбранную летчиком команду управления шасси.
Представленный на экране 1 индекс образной "радиовысоты" 8 - это преобразованное текущее значение высоты полета ЛА (Нтек), которое в блоке генератора символов (ГС) 15 (КПИ) 9, как визуализирующий сигнал в масштабе ее реального значения, представляется в виде горизонтальной прямой линии, которая перемещается по вертикали вверх-вниз по экрану 1 от индекса "Самолета" 5, до нижней границы навигационного поля 2 экрана 1, в соответствии со значением неподвижной неравномерной шкалы значения высоты полета ЛА, расположенной на вертикальной стороне границы экрана 1, причем нулевое значение шкалы расположено на уровне горизонтальной прямой проходящей через точку центра симметрии индекса "Самолет" 5. Совокупность визуального представления образной "радиовысоты" 8 и неподвижной неравномерной шкалы значения высоты полета ЛА 6 не отвлекает внимание летчика от выполнения поставленной задачи полета и, в тоже время, обеспечивает надежность и безопасность полета без стрессовых нагрузок.
Неподвижная неравномерная шкала значения высоты полета ЛА формируется стандартным внутренним языком программирования блока генератора символов (ГС) 15 и индицируется на вертикальной стороне границы экрана 1 (фиг. 1), причем нулевое значение шкалы расположено на уровне горизонтальной прямой проходящей через точку центра симметрии индекса "Самолет" 5
Таким образом, визуализирующими сигналами на экране 1 индицируется полный образ полета пространственного и углового положения ЛА управляемого летчиком.
Выбранная стилизованная форма ЛА видом сзади, в виде двух взаимно перпендикулярных линий подразумевает для индекса "Лидер" 4 и для индекса "Самолет" 5 без представления элементов контроля числа оборотов вала несущего винта, две взаимно перпендикулярные шкалы отсчета для угла тангажа и угла скольжения, нулевая отметка шкал которых располагается в центре горизонтальной линии. Градуировка шкал отсутствует т.к. летчику нет необходимости вглядываться в значения индицируемых углов из-за того, что точное угловое положение ЛА идентифицируемое индексом "Самолет" 5, определяется угловым положением индицируемого индекса "Лидер" 4.
Выбранная стилизованная форма ЛА видом сзади, в виде двух взаимно перпендикулярных линий подразумевает для индексов "Лидер" 4 и "Самолет" 5, функцию подвижной системы координат «угол тангажа - угол скольжения», в которой по оси абсцисс - вдоль прямой, символизирующей правое крыло ЛА (ОА2). располагаются положительные значения угла скольжения, (пример (фиг. 4) для индекса «Самолет». Аналогично для индекса «Лидер» 4) а вдоль прямой, символизирующей левое крыло ЛА (А1О), располагаются отрицательные значения угла скольжения. По оси ординат вдоль прямой, символизирующей киль ЛА (ОС), располагаются положительные значения угла тангажа, а вдоль прямой, символизирующей продолжение линии киля ЛА в противоположную сторону, располагаются отрицательные значения угла тангажа. Центр горизонтальной прямой линии символизирующей крылья ЛА - есть точка центра симметрии, относительно которой индексы "Лидер" 4 и "Самолет" 5, поворачиваются, визуализируя расчетный угол крена - (γрасч) и текущий угол крена - (γтек), соответственно. Точка центра симметрии индекса "Самолет" 5 (О) неподвижна и располагается в центре O(Хэ,Уэ) индикационного поля 3 экрана 1.
Точка центра симметрии индекса "Лидер" 4 перемещается по всему индикационному полю 3 экрана 1 в зависимости от визуализирующих сигналов, вырабатываемых в блоке генератора символов (ГС) 15 (КПИ) 9.
Поворот индекса "Самолет" 5 относительно точки центра симметрии, визуально представляет знак и величину текущего угла крена ЛА управляемого летчиком - (γтек). Текущий положительный угол крена для индекса "Самолет" 5, идентифицирующий ЛА управляемый летчиком, соответствует наклону вправо (по направлению часовой стрелки) вертикальной прямой (ОС), символизирующей киль ЛА, наклон влево (против направления часовой стрелки) - соответствует отрицательному значению угла крена.
Текущий угол тангажа и текущий угол скольжения для индекса "Самолет" 5 в блоке генератора символов (ГС) 15 представлен (фиг. 7) индикацией сигнала в виде треугольника (ΔА1ВА2), основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА (прямая ограниченная точками (А1) и (А2)), а положение вершины треугольника (В) соответствует значению текущего угла тангажа и значению текущего угла скольжения в координатах подвижной системы координат "угол тангажа - угол скольжения" для индекса "Самолет" 5.
Расчетный угол тангажа и расчетный угол скольжения для индекса "Лидер" 4 в блоке генератора символов (ГС) 15 представляется аналогичной индикацией сигнала в виде треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья индекса «Лидер» 4, а положение вершины треугольника соответствует расчетному значению угла тангажа и расчетному значению угла скольжения в координатах подвижной системы координат "угол тангажа - угол скольжения" для индекса "Лидер" 4.
Визуально (фиг. 7) для индекса "Самолет" 5 на индикационном поле 3 экрана 1 при положительном значении угла тангажа (υтек>0) и нулевом угле скольжения (βтек>0) вершина треугольника расположена на вертикальной прямой линии, которая символизирует киль ЛА.
Визуально (фиг. 8) для индекса "Самолет" 5 на индикационном поле 3 экрана 1 при отрицательном значении угла тангажа (υтек<0) и нулевом угле скольжения (βтек=0) вершина треугольника расположена на прямой линии, символизирующей продолжение линии киля ЛА в противоположную сторону.
Летчик, при нулевом значении текущего угла тангажа (υтек=0), видит на индикационном поле 3 экрана 1 текущее (фиг. 9) положительное значение угла скольжения (βтек>0) и текущее (фиг. 10) отрицательное значение угла скольжения (βтек<0), визуализируемого точкой вершины (В) треугольника (ΔА1ВА2) с нулевой высотой, расположенной на горизонтальной прямой ограниченной точками (А1) и (А2), символизирующей крылья ЛА.
Как видно при текущем (фиг. 9) положительном угле скольжения (βтек>0) точка (В) располагается справа относительно вертикальной прямой линии, символизирующей киль ЛА. При текущем (βтек<0) отрицательном угле скольжения (фиг. 10) точка (В) располагается слева относительно вертикальной прямой линии, символизирующей киль ЛА.
При всех вариантах (фигуры 7, 8, 9, 10) изменений текущего значения угла крена (γтек), текущего угла тангажа (υтек) и текущего значения угла скольжения (βтек) для индекса «Самолет» 5, летчик всегда будет держать в поле своего зрения, на индикационном поле 3 экрана 1 (КПИ) 9, и считывать (γнв) угловое положение элементов контроля числа оборотов вала несущего винта без переноса взгляда в положение отдельных приборов, показывающих числовое значение оборотов вала несущего винта вертолета 27 - тахометров, что бы не допустить выхода значений оборотов вала несущего винта за установленные ограничения и не допустить развития аварийных полетных ситуаций до катастрофических.
На фигуре 1 представлен фрагмент полета:
- индекс "Самолет" 5 с элементами контроля числа оборотов вала несущего винта изображен при отрицательном угле крена (γтек<0), отрицательном угле тангажа (υтек<0), нулевом угле скольжения (βтек=0).
- индекс "Лидер" 4 изображен при отрицательном угле крена (γрасч<0), положительном угле тангажа (υрасч>0), нулевом угле скольжения (βрасч=0)..
- высота полета 120 метров.
- курс 235° градусов.
- указатель скорости 380 км/час,
Скорость для данного участка маршрута больше заданной, так как геометрический размер индекса «Лидер» 4 больше геометрического размера индекса «Самолет» 5.
- указатель вертикальной скорости 0 м/сек.
Летчик на индикационном поле 3 экрана 1 (КПИ) 9 видит визуализированную команду индекса "Лидер" 4:
-1- « Изменить текущий угол крена (γтек) и текущий угол тангажа (υтек) индекса «Самолет» 5 до значений расчетного угла крена (γрасч) и расчетного угла тангажа (υрасч) представляемого индексом «Лидер» 4».
-2- « Не допускай снижение числа оборотов вала несущего винта за установленные ограничения».
Изменив текущий угол крена (γтек), текущий угол тангажа (υтек), до значения расчетного угла крена (γрасч) и значения расчетного угла тангажа (υрасч) индекса «Лидер» 4,а также возвращая обороты вала несущего винта в установленные ограничения, летчик продолжит полет по заданной траектории с заданной скоростью без развития аварийных ситуаций.
Предлагаемая схема сопряжения систем ЛА с командно-пилотажным индикатором (фиг. 2) и функциональная схема командно-пилотажного индикатора (фиг. 3) формируют на экране 1 любые возможные комбинации одновременного представления расчетного угла тангажа, расчетного угла скольжения и расчетного угла крена для индекса "Лидер" 4 и текущего угла тангажа, текущего угла скольжения и текущего угла крена для индекса "Самолет" 5 с элементами контроля числа оборотов вала несущего винта.
Литература.
1. «Способ поддержания числа оборотов несущего винта вертолета в допустимых пределах и устройство для его реализации.» Бездетнов Н.П. (RU), Григорьев И.И. (RU). Открытое акционерное общество "Камов" (RU). публикация патента: 27.06.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| Светотехническое оборудование взлетно-посадочной площадки корабля | 2019 |
|
RU2739849C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |






Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании вертолетом, а именно к командно-пилотажным индикаторам (КПИ). КПИ вертолета содержит экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс «Самолет», индицируемый на экране подвижный индекс «Лидер», генератор символов, соединенный с экраном, средства управления подвижным индексом «Лидер», выполненные в виде блока вычисления характеристик «Лидера». Причем блок вычисления характеристик «Лидера» содержит блок вычисления параметров текущего угла скольжения, блок вычисления значения расчетного угла крена, блок вычисления расчетного угла скольжения, блок вычисления коэффициента скорости полета ЛА, блок расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блок вычисления значения расчетного угла тангажа, блок расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА. При этом КПИ дополнительно снабжен блоком АЦП, блоком вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет», блоком пропорций линий и шкалы высоты, блоком алгебраической сборки индексов. Технический результат – повышение безопасности пилотирования вертолета. 10 ил.
Командно-пилотажный индикатор вертолета, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс «Самолет», выполненный в виде одной горизонтальной прямой, символизирующей крылья летательного аппарата (ЛА), и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии и обозначающий текущее положение вертолета в пространстве, индицируемый на экране подвижный индекс «Лидер», выполненный в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА, и пересекающей горизонтальную прямую в ее центре под прямым углом, имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса «Самолет» и обозначающий требуемое положение в пространстве, генератор символов, соединенный с экраном, средства управления подвижным индексом «Лидер», выполненные в виде блока вычисления характеристик «Лидера», а именно: блока вычисления параметров текущего угла скольжения, блока вычисления значения расчетного угла крена, блока вычисления расчетного угла скольжения, блока вычисления коэффициента скорости полета ЛА, блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блока вычисления значения расчетного угла тангажа, блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса «Лидер» по индикационному полю в вертикальном направлении, с возможностью индикации индекса «радиовысота» и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом индекс «Самолет» и индекс «Лидер» выполнены с возможностью одновременного отображения угла скольжения и угла тангажа, путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индексом «Самолет» и отклонению от заданного значения угла тангажа и угла скольжения индексом «Лидер» поворотом индекса «Лидер» вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса «Лидер» при увеличении или уменьшении, соответственно, заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс «Лидер» совмещается с индексом «Самолет», отличающийся тем, что дополнительно снабжен блоком аналого-цифрового преобразователя, блоком вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет», блоком пропорций линий и шкалы высоты, блоком алгебраической сборки индексов, причем редуктор двигателя по параметру аналогового значения числа оборотов вала несущего винта соединен с входом блока аналого-цифрового преобразователя, выход которого по параметру цифрового значения оборотов вала несущего винта соединен с входом блока вычисления углового положения элементов контроля числа оборотов вала несущего винта индекса «Самолет», с выхода которого параметр угла поворота элементов контроля числа оборотов вала несущего винта и параметры с выхода блока пропорций линий и шкалы высоты длина линии крыла индексов «Самолет/Лидер», длина линии киля индексов «Самолет/Лидер», длины линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» и длина линии, равной расстоянию от центра индикационного поля экрана до нижней границы навигационного поля экрана, объединяются в числовой массив в блоке системы автоматического управления полетом, с выхода которого числовой массив поступают на вход блока командно-пилотажного индикатора, в котором параметры числового массива: длина линии крыла индексов «Самолет/Лидер», длина линии киля индексов «Самолет/Лидер», длина линии элемента контроля числа оборотов вала несущего винта для индекса «Самолет» и угол поворота элементов контроля числа оборотов вала несущего винта поступают на вход блока алгебраической сборки индексов, первый выход которого по параметру геометрического образа индекса «Самолет» с элементами контроля числа оборотов вала несущего винта и второй выход по параметру геометрического образа индекса «Лидер» соединены с входом блока генератора символов, а параметр числового массива длина линии, равная расстоянию от центра индикационного поля экрана до нижней границы навигационного поля экрана, соединен с входом блока генератора символов, который выполнен с возможностью визуализации индекса «Самолет» с элементами контроля числа оборотов вала несущего винта, которые расположены под углом поворота элементов контроля числа оборотов вала несущего винта и визуализацией неподвижной неравномерной шкалы высоты полета, индицирующей значения высоты полета ЛА от точки проекции центра индикационного поля экрана на вертикальную сторону границы экрана, вдоль вертикальной стороны границы экрана, до нижней границы навигационного поля экрана.
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Приспособление для сигнализации при обрыве нити | 1933 |
|
SU44842A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| US 9409655 B1, 09.08.2016. | |||

