Изобретение относится к средствам для контроля параметров радиотехнических устройств и может быть использовано при контроле самолетного радиолокатора, установленного на самолете-перехватчике, при переводе радиолокатора из режима обзора передней полусферы в режим захвата цели.
Известен способ контроля самолетного радиолокатора при его переводе из режима обзора в режим захвата цели, основанный на формировании контрольного сигнала, имитирующего сигнал цели, после чего производят его излучение в направлении зеркала антенны радиолокатора. Затем переводят радиолокатор в режим обзора передней полусферы и после обнаружения контрольного сигнала переводят радиолокатор в режим захвата, при этом перед началом излучения контрольного сигнала в направлении радиолокатора зеркало контрольной антенны фиксируют по осям азимута и наклона. В режиме захвата определяют угловое положение зеркала антенны посредством считывания информации с датчиков угла поворота по осям азимута и наклона, после чего определяют отклонение зеркала антенны радиолокатора от направления на контрольную антенну и принимают решение о наличии устойчивого захвата цели, если это отклонение по абсолютному значению лежит в пределах от нуля до 0,2 ширины диаграммы направленности антенны радиолокатора (Патент №2299447 по классу G01S 7/40 по заявке №2005137944/09 (042370) от 06.12.2005 г.).
Особенность известного способа заключается в том, что до перевода радиолокатора в режим захвата центры зеркала контрольной антенны и антенны радиолокатора были зафиксированы, то есть лежали на одной прямой, перпендикулярной их плоскостям. В этом случае при переводе радиолокатора в режим захвата величину отклонения зеркала определяют по шкалам азимута и наклона антенны относительно их нулевого положения.
Известный способ нашел применение в тех случаях, когда имеется возможность точной фиксации углового положения контрольной антенны и антенны радиолокатора, например, в условиях завода-изготовителя. Однако при проведении контроля радиолокатора в составе самолета в условиях аэродрома осуществить точную фиксацию антенн не представляется возможным, что не позволяет в этих условиях применить известный способ контроля.
Недостаток известного способа - невозможность применения при контроле радиолокатора при его установке на самолете в условиях аэродрома.
Задачей изобретения является формирование способа, позволяющего производить контроль устойчивого захвата цели самолетным радиолокатором при его установке в составе самолета в условиях аэродрома.
Опыт проведения контроля самолетных радиолокаторов показал, что отклонение зеркала его антенны от направления на контрольную антенну без фиксации их взаимного положения может быть определено при наличии информации о направлении зеркала антенны радиолокатора на контрольную антенну в режиме захвата, которое может быть определено как среднее значение измерения его углового положения по осям азимута Х и наклона У в процессе проведения n переходов радиолокатора из режима обзора в режим захвата, где n лежит в пределах от трех до шести.
Решение поставленной задачи достигается тем, что отклонение зеркала антенны радиолокатора от направления на контрольную антенну определяют следующим образом: переводят радиолокатор из режима обзора в режим захвата n раз, в процессе проведения каждой операции фиксируют угловое положение зеркала антенны радиолокатора по осям азимута и наклона в режиме захвата посредством съема информации с датчиков угла поворота зеркала. Направление на контрольную антенну определяют как среднее значение зафиксированных угловых положений антенны радиолокатора в процессе проведения всех операций. После этого для каждой операции перевода определяют разность между полученным значением направления на контрольную антенну и результатом измерения углового положения зеркала контрольной антенны в этой операции перевода. А отклонения зеркала антенны радиолокатора от направления на контрольную антенну по осям азимута и наклона определяют как максимальные значения разностей, определенных для каждой из n операций перевода радиолокатора из режима обзора в режим захвата.
На фиг.1 представлена схема контроля самолетного радиолокатора, на фиг.2 - сечения следа диаграмм направленности контрольной антенны (позиция Д) и антенны радиолокатора (позиция Е) в вертикальной плоскости, при проведении захвата, на которой ΔХ и ΔY обозначены угловые отклонения зеркала антенны радиолокатора от направления на контрольную антенну по осям азимута и наклона.
В состав схемы контроля (фиг.1) входят: генератор СВЧ 1, аттенюатор 2, контрольная антенна 3 с зеркалом 4 и диаграммой направленности 5, а также радиолокатор 6 с антенной 7, включающей зеркало 8 с диаграммой направленности 9, а также индикатор 10, кнопки ЗАХВАТ 11 и СБРОС ЗАХВАТА 12, расположенные на пульте управления радиолокатора 13, и датчики угла поворота зеркала 8 по осям азимута и наклона 14 и 15, установленные на самолете-перехватчике 16.
Выход генератора СВЧ 1 через аттенюатор 2 соединен со входом контрольной антенны 3, зеркало 4 которой формирует диаграмму направленности 5, имитирующую отраженный от цели сигнал, ориентированный в сторону радиолокатора 6, включающего антенну 7 с зеркалом 8, имеющую диаграмму направленности 9, направленную в сторону зеркала 4 контрольной антенны 3. Выходы радиолокатора 6 соединены с индикатором 10 и с пультом управления 13, включающим кнопку ЗАХВАТ 11 и кнопку СБРОС ЗАХВАТА 12, а с зеркалом 8 антенны 7 соединены датчики его угла поворота по осям азимута 14 и наклона 15.
Способ контроля осуществляют следующим образом: при проведении штатного контроля радиолокатора 6 самолет-перехватчик 16 с радиолокатором 6 устанавливают на аэродроме в направлении на контрольную антенну 4 (фиг.1) и посредством генератора СВЧ 1 формируют контрольный сигнал, имитирующий отраженный от цели сигнал. Регулируют сигнал по мощности посредством аттенюатора 2, включенного на выходе генератора СВЧ 1 до величины, соответствующей дальности захвата, после чего посредством контрольной антенны 3 с зеркалом 4 с игольчатой диаграммой направленности 5 излучают контрольный сигнал в направлении зеркала 8 антенны 7, затем радиолокатор 6 переводят в режим обзора, при котором зеркало 8 антенны 7 начинает вести построчный обзор передней полусферы. При появлении отметки цели на экране индикатора 10 радиолокатор 6 переводят в режим захвата, для чего с отметкой цели совмещают строб захвата и производят нажатие кнопки ЗАХВАТ 11, расположенной на пульте управления радиолокатора 13 и визуально наблюдают за изменением изображения на экране индикатора 10, по которому определяют наличие перехода радиолокатора 6 в режим захвата. В режиме захвата фиксируют угловое положение зеркала 8 антенны 7 радиолокатора 6 относительно осей азимута и наклона посредством съема информации с датчиков угла поворота 14 и 15 (фиг.2).
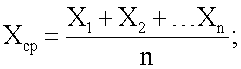
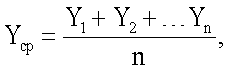
Далее радиолокатор 6 переводят обратно в режим обзора посредством нажатия кнопки СБРОС ЗАХВАТА 12 на пульте контроля радиолокатора 13 и повторяют операцию перевода n раз. В процессе проведения каждой операции перехода в режиме захвата фиксируют угловое положение зеркала 8 антенны 7 радиолокатора 6 относительно осей азимута и наклона посредством съема информации с датчиков угла поворота 14 и 15 (Х1; Х2 … Хn: У1; У2 … Уn). Направление на контрольную антенну определяют как среднее значение углового положения зеркала 8 антенны 7 радиолокатора 6 в процессе проведения всех операций перевода:
 ;
;  .
.
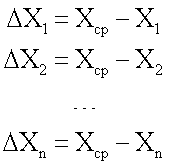
Далее для каждой операции перевода определяют разность между полученным значением направления на контрольную антенну и результатом измерения углового положения зеркала контрольной антенны в этой операции перевода радиолокатора 6 из режима обзора в режим захвата.
Отклонение зеркала антенны радиолокатора от направления на контрольную антенну по осям азимута и наклона определяют как максимальные значения разности между полученным значением направления на контрольную антенну и результатом измерения углового положения зеркала контрольной антенны в этой операции перехода радиолокатора 6 из режима обзора в режим захвата, то есть:
ΔX=max{ΔX1; ΔX2 … ΔXn};
ΔY=max{ΔY1; ΔY2 … ΔYn}.
Новое выполнение операции определения углового отклонения зеркала 8 антенны 7 радиолокатора 6 от направления на контрольную антенну 3 путем повторения операций перехода радиолокатора 6 из режима обзора в режим захвата n-раз и определения углового положения зеркала 8 антенны 7 радиолокатора 6 в режиме захвата посредством считывания информации с датчиков угла поворота зеркала по осям азимута и наклона 14 и 15 в сочетании с описанными процедурами обработки этой информации позволяет без соосной установки антенн получить достоверную информацию о том, насколько точно установилось зеркало 8 антенны 7 радиолокатора 6 в направление контрольной антенны 3 в режиме захвата, чем обеспечить проведение контроля радиолокатора 6 при его штатной проверке в составе самолета-перехватчика в условиях аэродрома.
Все описанные выше операции являются типовыми и не вызывают трудностей при технической реализации предложенного способа в полном объеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2299447C1 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2005 |
|
RU2296286C1 |
| СПОСОБ КОНТРОЛЯ КОМПЕНСАЦИОННОГО КАНАЛА САМОЛЕТНОГО РАДИОЛОКАТОРА | 2007 |
|
RU2321019C1 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2359202C2 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2297642C2 |
| САМОЛЕТНЫЙ ПРИЦЕЛ | 2007 |
|
RU2379613C2 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
| САМОЛЕТНЫЙ РАДИОЛОКАТОР | 2005 |
|
RU2296342C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
Изобретение относится к средствам для контроля параметров радиотехнических устройств и может быть использовано при контроле самолетного радиолокатора, устанавливаемого на самолете-перехватчике, при переходе радиолокатора из режима обзора передней полусферы в режим захвата цели. Достигаемым техническим результатом изобретения является формирование способа контроля, позволяющего производить контроль радиолокатора, установленного на самолете-перехватчике, при его штатной проверке в условиях аэродрома. Указанный результат достигается за счет того, что в процессе перевода радиолокатора из режима обзора в режим захвата n раз фиксируют угловое положение антенны по осям азимута и наклона, производят обработку полученной информации, по которой определяют угловое отклонение зеркала антенны от направления на контрольную антенну, имитирующую сигнал, отраженный от цели. После чего принимают решение о наличии устойчивого захвата в том случае, если максимальные значения отклонений по азимуту и наклону по абсолютному значению не превышают угловой величины, лежащей в пределах от нуля до 0,2 ширины диаграммы направленности антенны радиолокатора. 2 ил.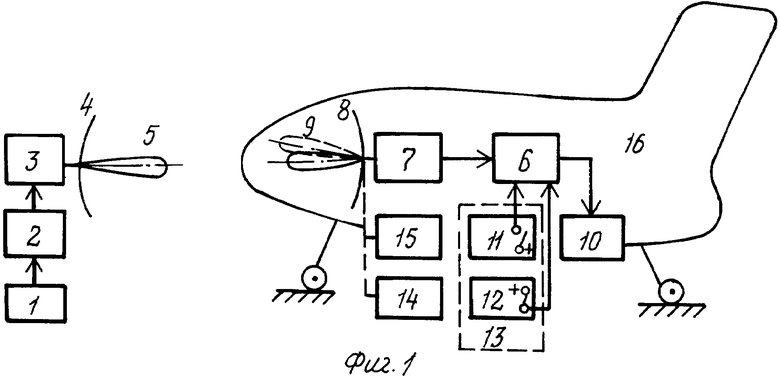
Способ контроля самолетного радиолокатора при его переводе из режима обзора в режим захвата цели, основанный на формировании контрольного сигнала, имитирующего сигнал цели на дальности, соответствующей режиму захвата, посредством сверхвысокочастотного (СВЧ) генератора, выходную мощность которого регулируют посредством аттенюатора, включенного на его выходе, излучении контрольного сигнала в направлении зеркала антенны радиолокатора посредством контрольной антенны с игольчатой диаграммой направленности, переводе радиолокатора в режим обзора передней полусферы, визуальном обнаружении контрольного сигнала в виде отметки цели на экране индикатора, переводе радиолокатора в режим захвата, после чего определяют отклонение зеркала антенны радиолокатора от направления на контрольную антенну и принимают решение о наличии устойчивого захвата цели, если величина отклонения по абсолютному значению лежит в пределах от 0 до 0,2 ширины диаграммы направленности антенны радиолокатора, отличающийся тем, что отклонение зеркала антенны радиолокатора от направления на контрольную антенну определяют следующим образом: переводят радиолокатор из режима обзора в режим захвата n раз, в процессе проведения каждой операции фиксируют угловое положение зеркала антенны радиолокатора по осям азимута и наклона в режиме захвата посредством съема информации с датчиков угла поворота зеркала (X1, Х2, …, Xn; Y1, Y2, …, Yn), направление зеркала антенны радиолокатора на контрольную антенну определяют как среднее значение зафиксированных угловых положений антенны радиолокатора в процессе проведения всех операций:
для каждой операции перевода определяют разность между полученным значением направления на контрольную антенну и результатом измерения углового положения зеркала контрольной антенны в этой операции перевода
отклонения зеркала антенны радиолокатора от направления на контрольную антенну по осям азимута и наклона определяют как максимальные значения разностей, определенных для каждой из n операций перевода радиолокатора из режима обзора в режим захвата:
ΔX=max{ΔX1; ΔX2 … ΔXn}; ΔY=max{ΔY1; ΔY2 … ΔYn}.
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2299447C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИМПУЛЬСНОЙ РЛС КРУГОВОГО ОБЗОРА | 1990 |
|
RU2025741C1 |
| RU 93041365 A, 20.02.1996 | |||
| US 2006220951 A1, 05.10.2006 | |||
| US 3199107, 03.08.1965 | |||
| US 4531127, 23.07.1985. | |||

