Изобретение относится к информационно-измерительной технике и может найти применение для бесконтактного измерения и контроля геометрических параметров компрессорных и турбинных лопаток и других подобных изделий сложной формы.
Допуски на геометрические параметры лопаток находятся в пределах от единиц до десятков микрон. В этих условиях устройства контроля лопаток должны быть оснащены высокоточными измерителями указанных параметров и обеспечивать минимальную деформацию пера лопаток под действием собственного веса в процессе измерений.
Известно устройство для контроля профиля пера лопатки, содержащее неподвижное основание, на котором закреплен вертикальный кронштейн, первую каретку, установленную на неподвижном основании и снабженную приводом перемещения вдоль координаты Х системы координат устройства и первым датчиком линейного перемещения, вторую каретку, установленную на первой каретке и снабженную приводом перемещения вдоль координаты Y системы координат устройства и вторым датчиком линейного перемещения, измеритель дальности, закрепленный на вертикальном кронштейне и состоящий из источника узкого светового луча, например лазера, интегрального многоэлементного фотоприемника и объектива, установленного с возможностью обеспечения триангуляционной оптической связи фотоприемника с источником узкого светового луча через контролируемую поверхность пера лопатки, персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам фотоприемника измерителя дальности и датчиков линейных перемещений, а выходы ПЭВМ соединены со входами приводов первой и второй кареток [1].
Такое устройство характеризуется низкой точностью измерений вследствие значительной деформации (прогиба) пера лопатки под действием собственного веса. Это вызвано позиционированием лопатки при измерениях в плоскости XOY системы координат устройства, при котором ее перо прогибается максимальным образом.
Известно также устройство для контроля профиля пера лопатки, содержащее неподвижное основание, поворотный стол, установленный на неподвижном основании и снабженный приводом вращения его вокруг оси, параллельной оси Z системы координат устройства, и средством закрепления решетки с лопатками, каретку, также установленную на неподвижном основании и снабженную приводом перемещения вдоль координаты Y системы координат устройства и датчиком линейного перемещения, средство измерения, установленное на каретке и содержащее оптически сопряженные между собой источник и приемник оптического излучения и привод узла его наклона в плоскости, параллельной плоскости XOZ системы координат устройства, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам приемника оптического излучения, датчика углового положения узла наклона и датчика линейного перемещения каретки, а выходы соединены с приводами перемещения каретки и узла наклона средства измерения [2].
Такое устройство также характеризуется низкой точностью измерений, которая обусловлена относительно большой деформацией (прогибом) пера лопатки под действием собственного веса в процессе измерений.
Известно также устройство для контроля профиля пера лопатки, содержащее неподвижное основание, на котором закреплены два вертикальных кронштейна, первую каретку, установленную на неподвижном основании и снабженную приводом перемещения вдоль координаты Х системы координат устройства, датчиком линейного перемещения и средством закрепления лопатки, вторую и третью каретки, установленные на соответствующих вертикальных кронштейнах и снабженные каждая приводом перемещения вдоль координаты Z системы координат устройства и датчиком линейного перемещения, два измерителя дальности, закрепленные на второй и третьей каретках и состоящие каждый из источника узкого светового луча, например лазера, интегрального многоэлементного фотоприемника и объектива, установленного с возможностью обеспечения триангуляционной оптической связи фотоприемника с источником узкого светового луча через контролируемую поверхность пера лопатки, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам фотоприемника измерителей дальности и датчиков линейных перемещений, а выходы соединены с приводами кареток [3].
В данном устройстве для снижения прогиба пера лопатки под действием собственного веса ее устанавливают на «ребро», «кромку». Тем не менее для «длинных» лопаток такое ее позиционирование не является достаточным для исключения деформации при измерениях.
Наиболее близким изобретением к предлагаемому по технической сущности и схемному решению является устройство для контроля профиля пера лопатки, содержащее неподвижное основание, на котором закреплен вертикальный кронштейн, первую каретку, установленную на неподвижном основании и снабженную приводом перемещения вдоль координаты Х системы координат устройства и первым датчиком линейного перемещения, вторую каретку, установленную на первой каретке и снабженную приводом перемещения вдоль координаты Y системы координат устройства и вторым датчиком линейного перемещения, поворотный стол, установленный на второй каретке и снабженный приводом вращения вокруг оси, параллельной оси Y системы координат устройства, датчиком угловых перемещений и средством закрепления лопатки, измеритель дальности, закрепленный на вертикальном кронштейне и состоящий из источника узкого светового луча, например лазера, интегрального многоэлементного фотоприемника и объектива, установленного с возможностью обеспечения триангуляционной оптической связи фотоприемника с источником узкого светового луча через контролируемую поверхность пера лопатки, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам фотоприемника измерителя дальности и датчиков линейных и углового перемещений, а выходы ПЭВМ соединены со входами приводов первой и второй кареток и поворотного стола [4].
Такое устройство, выбранное в качестве прототипа, характеризуется относительно низкой точностью измерений и, как следствие, относительно низкой достоверностью результатов контроля, что вызвано значительным прогибом пера лопатки под действием собственного веса в процессе измерений.
Задачей настоящего изобретения является повышение точности измерений и достоверности результатов контроля профиля пера лопатки.
Для достижения указанного технического результата устройство для контроля профиля пера лопатки, содержащее неподвижное основание, на котором закреплен вертикальный кронштейн, поворотный стол, снабженный приводом вращения, датчиком угловых перемещений и средством закрепления лопатки, измеритель дальности, состоящий из источника узкого светового луча, интегрального многоэлементного фотоприемника и объектива, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам интегрального многоэлементного фотоприемника, измерителя дальности и датчика углового перемещения, а выход соединен с приводом вращения поворотного стола, содержит также каретку, установленную на вертикальном кронштейне и снабженную приводом перемещения по кронштейну вдоль координаты Z системы координат устройства, соединенным с выходом ПЭВМ, и датчиком линейного перемещения, подключенным к входу ПЭВМ, установленное на каретке средство перемещения измерителя дальности, выполненное в виде двухзвенного механизма с плоскостью перемещения, параллельной плоскости XOY системы координат устройства, при этом поворотный стол установлен на неподвижном основании и выполнен с возможностью вращения контролируемой лопатки вокруг оси, параллельной оси Z системы координат устройства, первое звено двухзвенного механизма шарнирно связано одним концом с кареткой, а другим концом - со вторым звеном, на другом конце которого установлен измеритель дальности, каждое из звеньев двухзвенного механизма снабжено приводом вращения, соединенным с выходом ПЭВМ, и датчиком углового положения, выход которого подключен к входу ПЭВМ.
Кроме того, каждое из звеньев двухзвенного механизма снабжено противовесом, размещенным на противоположной стороне от шарнира данного звена.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах устройства, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам устройства, а выделение из перечня аналогов прототипа позволило выявить совокупность существенных по отношению к техническому результату отличительных признаков заявленного устройства.
Основными признаками, отличающими заявляемое устройство от прототипа, являются:
- наличие каретки, установленной на вертикальном кронштейне и снабженной приводом перемещения по кронштейну вдоль координаты Z системы координат устройства, соединенным с выходом ПЭВМ, и датчиком линейного перемещения, подключенным к входу ПЭВМ;
- наличие установленной на каретке средства перемещения измерителя дальности, выполненное в виде двухзвенного механизма с плоскостью перемещения, параллельной плоскости XOY системы координат устройства;
- наличие первого звена двухзвенного механизма, которое шарнирно связано одним концом с кареткой, а другим концом - со вторым звеном, на другом конце которого установлен измеритель дальности;
- снабжение каждого из звеньев двухзвенного механизма приводом вращения, соединенным с выходом ПЭВМ, и датчиком углового положения, выход которого подключен к входу ПЭВМ;
- установка поворотного стола на неподвижном основании и выполнение его с возможностью вращения контролируемой лопатки вокруг оси, параллельной оси Z системы координат устройства.
Кроме того, снабжение каждого из звеньев двухзвенного механизма противовесом, размещенным на противоположной стороне от шарнира данного звена.
Наличие указанных отличительных признаков обеспечивает соответствие заявляемого устройства условию патентоспособности «новизна» по действующему законодательству.
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений с целью выявления признаков, совпадающих с отличительными от выбранного прототипа, результаты которого показали, что заявленный объект явным образом не следует из известного уровня техники, определенного заявителем.
Иначе говоря, сравнение заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях информационно-измерительной техники показало, что последние не содержат признаков, сходных с признаками, отличающими заявляемое техническое решение от прототипа.
Это позволяет сделать вывод о соответствии заявляемого устройства условию патентоспособности «изобретательский уровень» по действующему законодательству.
Новая совокупность существенных признаков устройства позволяет повысить точность измерений и достоверность результатов контроля профиля пера лопатки.
Сущность изобретения иллюстрируются чертежами.
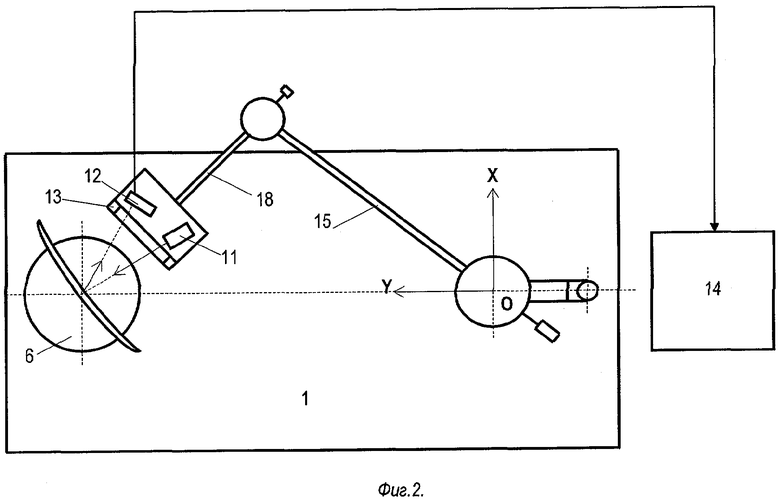
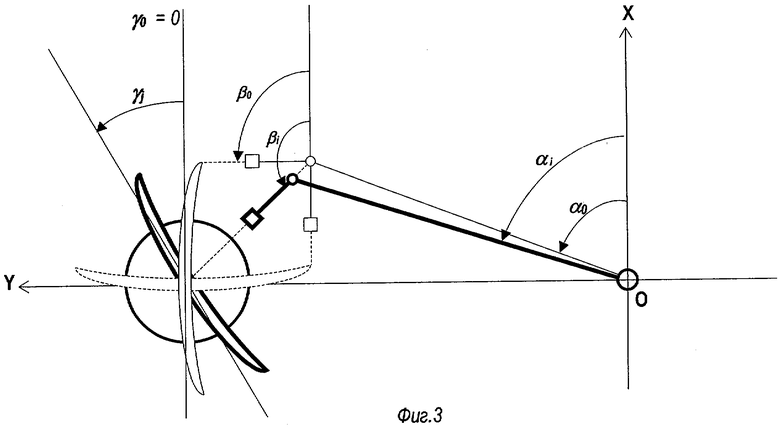
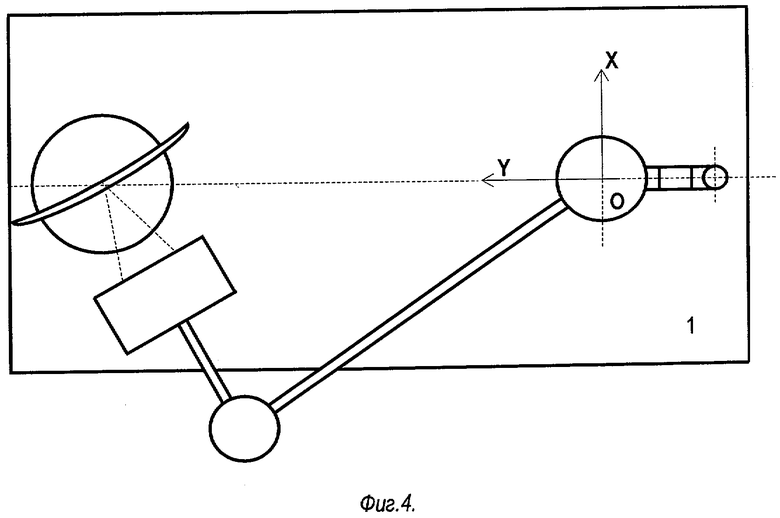
На фиг.1 приведена конструктивная схема устройства (вид сбоку), на фиг.2 - то же, вид сверху. Фиг.3 поясняет работу устройства. Другой возможный вариант взаимного положения контролируемой лопатки и измерителя дальности в пространстве при измерениях показан на фиг.4.
Устройство для контроля профиля пера лопатки содержит (фиг.1) массивное неподвижное основание 1, на котором жестко закреплен вертикальный кронштейн 2, поворотный стол 3, снабженный приводом 4 вращения, датчиком 5 угловых перемещений и средством 6 крепления контролируемой лопатки 7, каретку 8, установленную на вертикальном кронштейне 2 и снабженную приводом 9 перемещения по кронштейну 2 вдоль координаты Z системы координат устройства и датчиком 10 линейного перемещения, измеритель дальности (фиг,2), состоящий из источника 11 узкого светового луча, например лазера, интегрального многоэлементного фотоприемника 12, и объектива 13, установленное на каретке 8 средство перемещения измерителя дальности (фиг.1, 2), выполненное в виде двухзвенного механизма с плоскостью перемещения, параллельной плоскости XOY системы координат устройства, и персональную электронную вычислительную машину (ПЭВМ) 14.
Поворотный стол 3 установлен на неподвижном основании 1 и выполнен с возможностью вращения контролируемой лопатки 7 вокруг оси, параллельной оси Z системы координат устройства (фиг.3).
Первое звено 15 двухзвенного механизма через шарнир 16 связан с кареткой 8, а через шарнир 17 - со вторым звеном 18, на другом конце которого установлен измеритель дальности.
Звено 15 двухзвенного механизма снабжено приводом 19 вращения, датчиком 20 углового положения и противовесом 21, размещенным на противоположной стороне от шарнира 16 данного звена (фиг.1).
Звено 18 двухзвенного механизма снабжено приводом 22 вращения, датчиком 23 углового положения и противовесом 24, размещенным на противоположной стороне от шарнира 17 данного звена.
Выходы ПЭВМ 14 соединены со входами соответствующих приводов 4, 19 и 22 вращения и привода 9 перемещения, а выходы датчиков 5, 20 и 23 вращения, датчика 10 перемещения и фотоприемника 12 подключены к соответствующим входам ПЭВМ 14.
В устройстве в качестве интегрального многоэлементного фотоприемника 12 могут быть использованы широко известные фотолинейки, фотоматрицы и т.п. [5].
Работа устройства контроля основана на измерении дальности от заданных точек секущей плоскости до поверхности пера лопатки 7 и проходит в несколько этапов.
Этап 1. На данном этапе перед началом измерений в память ПЭВМ 14 вводятся:
а) программа измерений (контроля) профиля пера лопатки 7;
б) «идеальный образ» (математическая модель) пера лопатки 7 в k сечениях (k - целое число), параллельных плоскости XOY устройства, который формируется на основе чертежей и другой конструкторской документации лопатки 7 в виде эталонных значений координат точек сечений;
в) траектория перемещения (координаты положения) измерителя дальности в процессе измерений в плоскости сечения в виде текущих значений углов аi и βi поворота соответственно первого 15 и второго 18 звеньев двухзвенного механизма, где i=0, 1, 2, 3,...; данная траектория выбирается таким образом, чтобы в процессе измерений обеспечивалась триангуляционная оптическая связь фотоприемника 12 с источником 11 узкого светового луча через контролируемую поверхность пера лопатки 7;
г) углы γj поворота (позиционирования) пера лопатки 7 в процессе измерений, где j=0, 1, 2, 3,...;
д) координаты zk плоскостей перемещения двухзвенного механизма в процессе измерений;
е) допуски Δ на отклонения координат точек сечений пера лопатки 7.
Этап 2. С помощью средства 6 крепления контролируемая лопатка 7 устанавливается (позиционируется) на поворотном столе 3 в вертикальной плоскости (фиг.1).
Этап 3. Под действием управляющих сигналов, поступающих с ПЭВМ 14 на привод 9, каретка 8, а вместе с ней и двухзвенный механизм перемещаются по кронштейну 2 вдоль координаты Z системы координат устройства и занимают положение, соответствующее, например, координате z0, что определяется программой измерений. При этом текущее значение z контролируется датчиком 10 линейного перемещения.
Под действием управляющих сигналов, поступающих с ПЭВМ 14 на привод 4, поворотный стол 3, а вместе с ним и контролируемая лопатка 7 вращаются вокруг оси Z системы координат устройства и занимают угловое положение, соответствующее, например, исходному положению γ0=0, что определяется программой измерений (фиг.3). При этом текущее значение угла γ контролируется датчиком 5 углового перемещения.
Примечание. В описываемом устройстве принята «правая» система координат [6]. Отчет угла поворота любого элемента устройства начинается от положительной полуоси ОХ в направлении, противоположном вращению часовой стрелки.
Под действием управляющих сигналов, поступающих с ПЭВМ 14 на приводы 19 и 22, шарниры 16 и 17, а вместе с ними и звенья 15 и 18 двухзвенного механизма вращаются в плоскости z0, параллельной плоскости XOY системы координат устройства, и занимают угловые положения, соответствующие, например, исходным значениям α0 и β0.
При этом текущие значения углов α и β контролируются датчиками 20 и 23 углового положения.
Этап 4. Дальнейшая работа устройства основана на принципе оптической триангуляции. Световые лучи источника 11 направляются на поверхность пера лопатки 7. Рассеянное (диффузное) излучение с поверхности пера фокусируется объективом 13 на соответствующие светочувствительные элементы фотоприемника 12 в виде световых марок. Схема развертки фотоприемника 12 (на чертеже для простоты не показана) формирует тактовые импульсы, обеспечивающие оптоэлектронное преобразование изображений световой марки на элементах фотоприемника 12.
Данное преобразование осуществляется таким образом, чтобы изменения координат указанной световой марки на элементах фотоприемника 12 были пропорциональны изменениям профиля пера лопатки 7. Изображение световой марки вызывает изменение уровней напряжения в отдельных элементах фотоприемника 12, вследствие чего распределение выходных сигналов элементов во времени пропорционально пространственному распределению интенсивности света по сечению световой марки на элементах фотоприемника 12. Информационные сигналы с выхода фотоприемника 12 поступают на вход ПЭВМ 14 для последующей обработки согласно хранящейся в ней программе и получения значения дальности d до соответствующей точки поверхности пера лопатки 7.
На основе полученного значения дальности d и углов α и β в ПЭВМ 14 программным путем определяются координаты соответствующей точки поверхности пера лопатки 7.
В следующий момент под действием управляющих сигналов, поступающих с ПЭВМ 14 на приводы 19 и 22, шарниры 16 и 17, а вместе с ними и звенья 15 и 18 двухзвенного механизма вращаются в плоскости z0, параллельной плоскости XOY системы координат устройства, и занимают угловые положения, соответствующие значениям α1 и β1.
Одновременно под действием управляющих сигналов, поступающих с ПЭВМ 14 на привод 4, поворотный стол 3, а вместе с ним и контролируемая лопатка 7 вращаются вокруг оси Z системы координат устройства и занимают угловое положение, соответствующее углу γ1.
Аналогично указанному выше световые лучи источника 11 направляются на поверхность пера лопатки 7, а излучение с поверхности пера фокусируется объективом 13 на соответствующие элементы фотоприемника 12 в виде световых марок. Информационные сигналы с выхода фотоприемника 12 поступают на вход ПЭВМ 14 для последующей обработки согласно хранящейся в ней программе и получения очередного (текущего) значения дальности d до поверхности пера лопатки 7, которая запоминается в памяти ПЭВМ 14.
На основе полученного значения дальности d и углов α и β в ПЭВМ 14 программным путем вновь определяются координаты соответствующей точки поверхности пера лопатки 7.
Такая процедура определения координат точек поверхности пера лопатки 7 продолжается до тех пор, пока не будут завершены все измерения согласно программе измерений, при которых координата положения измерителя дальности z=z0.
После этого под действием управляющих сигналов, поступающих с ПЭВМ 14 на привод 9, каретка 8, а вместе с ней и двухзвенный механизм перемещаются по кронштейну 2 вдоль координаты Z системы координат устройства и занимают положение, соответствующее координате z1.
Дальнейшая работа устройства аналогична той, которая была описана выше. Этап работы устройства завершается выполнением всех измерений при различных значениях z согласно программе измерений.
Этап 5. По завершении программы измерений в памяти ПЭВМ 14 формируется совокупность значений координат точек сечений поверхности пера лопатки 7 в виде своеобразного «облака» значений по каждому сечению, которые на данном этапе работы устройства подвергаются математической обработке, например усреднению соседних значений. В итоге к концу этапа в ПЭВМ 14 формируется «реальный образ» пера лопатки 7 в виде координат точек при различных z.
На данном этапе работы устройства на основе анализа полученных данных возможны повторные измерения и уточнение координат точек сечений, если полученные значения координат точек вызывают сомнения, например в случае резкого отличия какого-то значения от соседних. Это может достигаться, например, корректировкой траектории перемещения измерителя дальности или «доворотом» пера лопатки 7 (изменением значения γ).
Этап 6. Программным путем производится сопоставление «идеального» и «реального» образов пера лопатки 7 посредством сопоставления величин координат их точек и установления, таким образом, величин отклонений «реального образа» пера лопатки 7 от его заданного «идеального образа» по каждому сечению.
Этап 7. На данном этапе осуществляется анализ результатов указанного сопоставления. В случае выхода отклонений за пределы допусков Δ они образуют совокупность отклонений профиля пера исследуемой лопатки 7 и могут быть использованы для принятия решения о соответствии профиля пера предъявляемым требованиям.
Результаты сопоставления могут быть выведены также на печать и/или отображаться на мониторе ПЭВМ 14. Кроме того, они могут быть использованы для механической доводки геометрических параметров соответствующих локальных участков пера лопатки 7 до требуемых величин.
В случае необходимости возможно иное (противоположное) взаимное положение пера лопатки и измерителя дальности (см. фиг.4).
Возможен вариант работы устройства, при котором для формирования в памяти ПЭВМ 14 «идеального образа» пера используется эталонная лопатка. Ее также закрепляют на поворотном столе 3 и проводят измерения, аналогичные описанным выше.
Таким образом, приведенная совокупность существенных признаков устройства позволяет обеспечить достижение такого технического результата, как повышение точности измерений и, как следствие, повышение достоверности результатов контроля профиля пера лопатки.
Указанный технический результат достигается благодаря:
1. Размещению лопатки в измерительном устройстве вертикально («стоймя»). При таком позиционировании перо лопатки в процессе измерений подвержено минимальному прогибу под действием собственного веса, что повышает точность измерений.
2. Наличию различных вариантов взаимного (углового) позиционирования пера лопатки и измерителя дальности. Лопатки 7 имеют сложный профиль, а часто и высокую степень «закрутки». Конструкция устройства позволяет путем выбора комбинаций величин углов α, β и γ обеспечить более полный обзор «затемненных», «закругленных» локальных участков пера лопатки.
3. Снабжению шарниров двухзвенного механизма противовесами. Противовесы 21 и 24 уравновешивают боковые изгибающие усилия, действующие на шарниры 16 и 17, благодаря чему обеспечивается повышение точности работы измерителя дальности.
Наиболее эффективно использование данного устройства при контроле лопаток с большой длиной пера.
В настоящее время заявителем изготовлен действующий макет предлагаемого устройства.
ЛИТЕРАТУРА
1. Свидетельство РФ на полезную модель №4601. Оптоэлектронная система измерения пера лопаток и оснастка для установки лопаток при измерениях. МПК G01В 11/24. Бюл. №7, 1997 г.
2. Патент РФ на изобретение №2176071. Устройство для контроля геометрических параметров лопаток лопаточной решетки машины. МПК G01В 11/24, 5/20. Бюл. №32, 2001 г.
3. Решение от 14.10.04 г. о выдаче патента РФ на изобретение по заявке №2003125146/28(026577) Оптоэлектронное устройство контроля геометрических параметров лопаток. Приоритет от 01.08.03 г. МПК G01В 11/24, 21/20.
4. Патент РФ на изобретение №2243503. Способ измерения геометрических параметров поверхностей сложнопрофилированных объектов и устройство для его осуществления. МПК G01В 11/24. Публ. 2004.12.27. (прототип).
5. Галиулин P.M. Системы технического зрения на основе коммутируемых фотодиодных структур. Тезисы докл. Всесоюзной конференции «Разработка систем технического зрения и их применение в промышленности». Ижевск, 1988.
6. Корн Г. и Корн Т. Справочник по математике для научных работников и инженеров. Определения, теоремы, формулы. М.: Наука, 1974, с.57, рис.2.1-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |
| СПОСОБ КОНТРОЛЯ НЕПЛОСКОСТНОСТИ ЛИСТОВЫХ ИЗДЕЛИЙ И СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2254556C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ С ВНУТРЕННЕЙ РЕЗЬБОЙ | 2007 |
|
RU2357204C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ТОЛЩИНЫ ЛИСТОВОГО ПРОКАТА | 2010 |
|
RU2458318C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ С РЕЗЬБОВОЙ ПОВЕРХНОСТЬЮ | 2008 |
|
RU2386925C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377494C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛОПАТОК | 2003 |
|
RU2254555C2 |
Устройство для контроля профиля пера лопатки содержит неподвижное основание, на котором закреплен вертикальный кронштейн, поворотный стол, снабженный приводом вращения, датчиком угловых перемещений и средством закрепления лопатки, измеритель дальности, состоящий из источника узкого светового луча, интегрального многоэлементного фотоприемника и объектива, и ПЭВМ. Дополнительно содержит каретку, установленную на вертикальном кронштейне и снабженную приводом перемещения по кронштейну вдоль координаты Z системы координат устройства, соединенным с выходом ПЭВМ, и датчиком линейного перемещения, подключенным к входу ПЭВМ, средство перемещения измерителя дальности выполнено в виде двухзвенного механизма с плоскостью перемещения, параллельной плоскости XOY системы координат устройства. Поворотный стол установлен на неподвижном основании и выполнен с возможностью вращения контролируемой лопатки вокруг оси, параллельной оси Z системы координат устройства. Технический результат - повышение точности измерений и достоверности результатов контроля профиля. 1 з.п. ф-лы, 4 ил.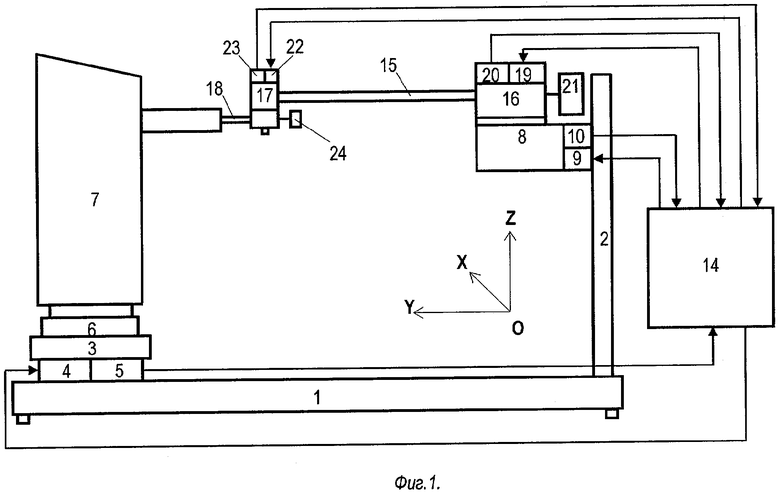
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| ПЛАСТИНЧАТЫЙ СЕРДЕЧНИК МАЛОМОЩНОГО ТРАНСФОРМАТОРА | 1926 |
|
SU5644A1 |
| Устройство для бесконтактного измерения мередиональный профиля полированных поверхностей | 1990 |
|
SU1788432A1 |
| WO 9940390 A, 12.08.1999. | |||

