Изобретение относится к контрольно-измерительной технике, а более конкретно - к средствам для бесконтактного контроля цилиндрических изделий с наружной или внутренней резьбой, и может быть использовано, например, для контроля параметров резьбы и других геометрических параметров насосно-компрессорных труб и муфт (НКТМ), бурильных и обсадных труб и муфт различного типоразмера после нарезки резьбы (выходной контроль), а также для контроля резьбы при ремонте нефтяного оборудования и скважин.
Установление уровня техники
Известны устройства для контроля толщины и других геометрических параметров изделий, содержащие средства для съема информации, выполненные в виде установленных по разные стороны от контролируемого изделия первого и второго оптоэлектронных головок, каждая из которых снабжена источником и приемником светового потока с соответствующими объективами, и средство обработки информации, при этом в каждой из оптоэлектронных головок приемник светового потока установлен с возможностью триангуляционной оптической связи с источником светового потока через соответствующую поверхность контролируемого изделия, а выходы приемников светового потока подключены ко входам средства обработки информации [1, 2].
В таких устройствах толщина изделия вычисляется по формуле

где С=const - расстояние между первым и вторым измерителями дальности (величина постоянная, задается конструктивно);
d1j и d2i - соответственно расстояния от первой и второй оптоэлектронных головок до поверхности контролируемого изделия;
i - текущий номер измерений.
Такие устройства характеризуются тем недостатком, что не обеспечивают контроль параметров резьбы цилиндрических изделий с наружной и внутренней резьбой, например, труб и муфт к ним.
Известно также устройство для контроля толщины и других геометрических параметров изделий, содержащие средства для съема информации, выполненные в виде двух установленных по разные стороны от контролируемого изделия оптоэлектронных головок, каждая из которых снабжена источником и приемником светового потока с соответствующими объективами, и специализированное средство обработки информации, при этом в каждой из оптоэлектронных головок приемник светового потока установлен с возможностью триангуляционной оптической связи с источником светового потока через соответствующую поверхность контролируемого изделия, а выходы приемников светового потока подключены к входам специализированного средства обработки информации [3].
В таком устройстве толщина изделия также вычисляется по формуле (1).
Данное устройство характеризуется тем же недостатком, а именно не обеспечивает контроль параметров резьбы цилиндрических изделий с внутренней или наружной резьбой - труб и муфт к ним.
Известно устройство для контроля параметров резьбы цилиндрических изделий с наружной резьбой, содержащее координатный стол, выполненный с возможностью перемещения вдоль продольной оси контролируемого изделия и снабженный электроприводом линейного перемещения и датчиком линейного перемещения, подставку, закрепленную на подвижной каретке, оптико-механический блок, установленный в подшипниках на подставке и снабженный электроприводом углового перемещения вокруг продольной оси, датчиком углового перемещения и двумя оптоэлектронными головками, каждая из которых образована из оптически сопряженных источника и приемника светового излучения, имеющих соответствующие объективы, и расположенные по разные стороны от резьбового участка контролируемого изделия, и персональную электронную вычислительную машину (ПЭВМ), входы которой подключены к выходам приемников светового излучения, датчика линейного перемещения и датчика углового перемещения, а выходы - к электроприводам линейного перемещения и углового перемещения, при этом оптико-механический блок выполнен в виде шпинделя, вал которого установлен в подшипниках на подставке и снабжен механизмом вертикального смещения, а головка шпинделя выполнена в виде двух С-образных держателей оптоэлектронных головок, установленных на планшайбе по разные стороны от продольной оси контролируемого изделия и снабжена механизмом регулировки межлучевого зазора, механизм вертикального смещения вала шпинделя выполнен в виде домкрата, а механизм регулировки межлучевого зазора головки шпинделя представляет собой настроечный вал с участками правой и левой резьбы, размещенных в соответствующих резьбовых отверстиях держателей оптоэлектронных головок, вал шпинделя жестко связан с планшайбой, а на механизме вертикального смещения вала шпинделя размещен координатный стол [4].
Данное устройство не обеспечивает контроль параметров резьбы цилиндрических изделий с внутренней резьбой, например, муфт к трубам.
При этом известно устройство для контроля параметров резьбы цилиндрических изделий с внутренней или наружной резьбой, содержащее основание, на котором установлен узел базирования контролируемого изделия с внутренней резьбой, первый координатный стол, выполненный с возможностью перемещения вдоль продольной оси контролируемого изделия с внутренней резьбой и связанный с датчиками продольного и углового перемещений и электроприводами продольного и углового перемещений, первую оптоэлектронную головку, размещенную на первом координатном столе и снабженную источником и приемником светового потока, оптически взаимодействующими с участком контролируемой поверхности изделия с внутренней резьбой, узел базирования контролируемого изделия с наружной резьбой, выполненный в виде двухконусного упора-центратора, размещенного на первом координатном столе, причем один из его конусов выполнен съемным, размещенный на первом координатном столе второй координатный стол, имеющий П-образную форму и связанный с датчиком поперечного перемещения и электроприводом поперечного перемещения, вторую оптоэлектронную головку, размещенную на втором координатном столе и снабженную источником и приемником светового потока, оптически взаимодействующими с участком контролируемой поверхности изделия с наружной резьбой, и персональную электронную вычислительную машину (ПЭВМ), входы которой соединены с выходами приемников светового потока оптоэлектронных головок, датчиками продольного и поперечного перемещений, и датчика углового перемещения, а выходы ПЭВМ - с приводами продольного и поперечного перемещений, при этом в первой оптоэлектронной головке приемник светового потока установлен с возможностью триангуляционной оптической связи с источником светового потока через соответствующую внутреннюю поверхность контролируемого изделия с внутренней резьбой, во второй оптоэлектронной головке, размещенной над поверхностью контролируемого изделия с наружной резьбой, источник светового потока и приемник светового потока размещены по разные стороны от контролируемого участка такого изделия [5].
Данное устройство характеризуется тем недостатком, что не обеспечивает контроль толщины стенок цилиндрических изделий с наружной или внутренней резьбой - труб и муфт к ним.
Характеристика и критика прототипа.
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому при использовании техническому результату является изобретение, предназначенное для контроля параметров резьбы трубных изделий и описанное в [6].
Такое изобретение, выбранное в качестве прототипа, содержит:
- основание, на котором установлены узел базирования контролируемого изделия и координатный стол, выполненный с возможностью перемещения вдоль продольной оси контролируемого изделия и связанный с датчиком линейного перемещения и электроприводом линейного перемещения,
- полый цилиндрический корпус, жестко закрепленный на координатном столе,
- узел сканирования, имеющий вилку, связанную с датчиком углового перемещения и электроприводом углового перемещения, и средства для съема информации, состоящие из установленного внутри полого цилиндрического корпуса коноскопа и системы подвижного и неподвижных зеркал, размещенных на концах вилки и образующих оптические каналы, обеспечивающие прохождение светового потока от коноскопа к наружной или внутренней поверхности контролируемого изделия и обратно,
- механизм поворота подвижного зеркала с соответствующим электроприводом,
- и средство обработки информации, выполненное в виде персональной электронной вычислительной машины (ПЭВМ), входы которой подключены к выходам датчиков линейного и углового перемещений и коноскопа, а выходы - к электроприводам линейного и углового перемещений и механизма поворота подвижного зеркала,
- при этом узел сканирования выполнен с возможностью вращения вокруг продольной оси контролируемого изделия и установлен в подшипнике на полом цилиндрическом корпусе.
Здесь коноскоп является элементом, общим для обоих средств для съема информации.
В таком устройстве основным подвижным (вращающимся) узлом является узел сканирования, выполненный в виде вилки, на концах которой размещены средства для съема информации. Вилка размещена в одном подшипнике на полом цилиндрическом корпусе.
Данная конструкция вилки вместе со средствами для съема информации является неуравновешенной механической системой устройства в том смысле, что центр тяжести вращающейся механической системы смещен от оси ее вращения (на чертеже - вверх от этой оси). В результате при вращении подшипник испытывает боковые нагрузки, быстро его изнашивающие и снижающие, в конечном счете, точность измерений.
Неуравновешенность системы приводит также к ее вибрации при вращении, что также снижает точность измерений.
Из вышеизложенного следует, что для того, чтобы снизить боковые нагрузки на подшипник, требуется каким-либо образом уравновесить вилку, например, путем использования противовеса, размещенного по другую сторону от оси вращения вилки.
Указанная механическая система не уравновешена также в плоскости чертежа, так как вес вилки вместе со средствами для съема информации направлен вниз и образует вращательный момент, «пытающийся» повернуть систему в этой плоскости против часовой стрелки. В результате при вращении подшипник испытывает дополнительные боковые нагрузки, также быстро его изнашивающие и снижающие, в конечном счете, точность измерений.
Следовательно, требуется уравновесить вилку также в плоскости чертежа и снизить тем самым боковые нагрузки на подшипник.
Следует также отметить, что данное устройство контроля работает по принципу коноскопической профилометриии на основе голографического интерференционного метода измерения. Данный принцип измерения является относительным - измерения проводятся относительно длины волны лазерного излучения подсчетом количества полос интерференционной картины.
Голографический интерференционный принцип измерения имеет очень высокую точность, однако она обеспечивается при измерениях зеркальных поверхностей, причем измерения возможны только в лабораторных условиях при полном исключении изменений угла наклона контролируемой поверхности, бликов и даже незначительных механических вибраций, так как, в противном случае, нарушается порядок подсчета интерференционных полос.
На сам метод измерения накладываются также многие другие факторы, такие как качество и шероховатость поверхности контролируемого изделия, его форма, условия измерения и эксплуатации, механические вибрации, изменения температуры и т.д., которые, в конечном счете, существенно снижают достигаемую точность измерения.
У прототипа компьютерный анализ голограмм имеет повышенные требования к компьютеру по быстродействию, объему памяти и стоимости. При этом требуется более сложное программное обеспечение.
Таким образом, первым недостатком прототипа является ее неуравновешенность как механической системы.
Второй недостаток прототипа - узкие функциональные возможности, не позволяющие определять толщину стенок изделий цилиндрической формы, например таких как трубы и муфты к ним.
Третий недостаток - невозможность использования его в промышленных условиях. Он может использоваться только в качестве лабораторного стенда.
Технический результат и его достижение.
Изобретение направлено на достижение таких технических результатов как:
а) обеспечение уравновешенности устройства как механической системы, снижение боковых нагрузок на подшипники цилиндрического корпуса;
б) расширение функциональных возможностей устройства путем обеспечения измерения толщины стенок цилиндрических изделий типа труб и муфт к ним;
в) обеспечение возможности работы устройства в промышленных условиях.
Достижение указанных технических результатов обеспечивается тем, что известное устройство для контроля геометрических параметров цилиндрических изделий с резьбовой поверхностью, содержащее:
- основание, на котором установлен узел базирования контролируемого изделия,
- координатный стол, выполненный с возможностью перемещения вдоль продольной оси контролируемого изделия и связанный с датчиком линейного перемещения и электроприводом линейного перемещения,
- цилиндрический корпус,
- узел сканирования, имеющий первую вилку и средства для съема информации,
- датчик углового перемещения и электропривод углового перемещения,
- средство обработки информации, выполненное в виде персональной электронной вычислительной машины (ПЭВМ), входы которой подключены к выходам датчиков линейного и углового перемещений, а выходы - к электроприводам линейного и углового перемещений,
содержит также
- размещенный на основании узел совмещения осей, на котором установлен координатный стол,
- причем цилиндрический корпус выполнен с возможностью вращения вокруг продольной оси и установлен на двух подшипниках на координатном столе,
- узел сканирования имеет установленную симметрично первой вилке вторую вилку и держатель вилок с механизмом регулировки расстояния между вилками, при этом держатель вилок жестко соединен с цилиндрическим корпусом, связанным с датчиком углового перемещения и электроприводом углового перемещения,
- на концах вилок размещены средства для съема информации, выполненные в виде оптоэлектронных головок, каждая из которых снабжена источником светового потока и приемником светового потока, причем приемник светового потока установлен с возможностью триангуляционной оптической связи с источником светового потока через соответствующий участок внутренней или наружной поверхности контролируемого изделия, а выходы приемников светового потока подключены ко входам ПЭВМ.
Кроме того:
- держатель вилок выполнен П-образным и имеет в средней части продольный паз, а на концах держателя вилок выполнены отверстия,
- торцы вилок размещены в продольном пазе держателя вилок и имеют отверстия соответственно с правой и левой резьбой,
- а механизм регулировки расстояния между вилками выполнен в виде подстроечного вала, концы которого размещены в отверстиях на концах держателя вилок и снабженного участками с правой и левой резьбой, установленными в резьбовых отверстиях торцов соответствующих вилок,
- узел совмещения осей содержит нижнюю секцию, установленную на основании, и верхнюю секцию, выполненную с возможностью перемещения относительно нижней секции и снабженную набором съемных подставок, попарно размещаемых между нижней и верхней секциями, и раздвижным четырехзвенным шарнирным механизмом пантографного типа с настроечным винтом, причем шарниры механизма размещены попарно на нижней и верхней секциях и по одному на первой и второй втулках, а настроечный винт снабжен рукояткой и участками с правой и левой резьбой, размещенными в соответствующих резьбовых отверстиях первой и второй втулок,
- в оптоэлектронных головках, размещенных над наружной поверхностью контролируемого изделия, источник светового потока и приемник светового потока установлены на соответствующем конце вилки по разные стороны от контролируемого участка изделия.
Проведенный им анализ уровня техники, включающий поиск по патентным и другим научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам изобретения, а выделение из перечня аналогов прототипа обеспечило выявление совокупности существенных по отношению к техническим результатам отличительных признаков заявленного изобретения.
Заявителем проведена также проверка соответствия указанной совокупности существенных признаков устройства трем условиям (критериям) патентоспособности.
Проверка соответствия заявляемого устройства условию патентоспособности «новизна».
Основными признаками, отличающими заявляемое устройство от ближайшего аналога-прототипа, являются:
- размещение на основании узла совмещения осей, на котором установлен координатный стол,
- выполнение цилиндрического корпуса с возможностью вращения вокруг продольной оси и установление его на двух подшипниках на координатном столе,
- наличие в узле сканирования установленную симметрично первой вилке вторую вилку и держатель вилок с механизмом регулировки расстояния между вилками,
- жесткое соединение держателя вилок с цилиндрическим корпусом, связанным с датчиком углового перемещения и электроприводом углового перемещения,
- размещение на концах вилок средств для съема информации, выполненных в виде оптоэлектронных головок, каждая из которых снабжена источником светового потока и приемником светового потока,
- установление приемника светового потока с возможностью триангуляционной оптической связи с источником светового потока через соответствующий участок внутренней или наружной поверхности контролируемого изделия,
- подключение выходов приемников светового потока ко входам ПЭВМ.
Кроме того:
- выполнение держателя вилок П-образным и наличие в средней части продольного паза,
- выполнение на концах держателя вилок отверстий,
- размещение торцов вилок в продольном пазе держателя вилок,
- и наличие отверстия соответственно с правой и левой резьбой,
- выполнение механизма регулировки расстояния между вилками в виде подстроечного вала, концы которого размещены в отверстиях на концах держателя вилок,
- снабжение его участками с правой и левой резьбой, установленными в резьбовых отверстиях торцов соответствующих вилок,
- наличие в узле совмещения осей нижней секции, установленной на основании, и верхней секции, выполненной с возможностью перемещения относительно нижней секции и снабженной набором съемных подставок, попарно размещаемых между нижней и верхней секциями, и раздвижным четырехзвенным шарнирным механизмом пантографного типа с настроечным винтом,
- размещение шарниров механизма попарно на нижней и верхней секциях и по одному на первой и второй втулках,
- снабжение настроечного винта рукояткой и участками с правой и левой резьбой, размещенными в соответствующих резьбовых отверстиях первой и второй втулок,
- установление в оптоэлектронных головках, размещенных над наружной поверхностью контролируемого изделия, источника светового потока и приемника светового потока на соответствующем конце вилки по разные стороны от контролируемого участка изделия.
Наличие указанных признаков обеспечивает соответствие всей совокупности признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых технический результат достигнут аналогичной совокупностью существенных признаков. По имеющимся у заявителя сведениям, совокупность существенных признаков, характеризующих сущность заявляемого изобретения, неизвестна, что также позволяет сделать вывод о соответствии его условию патентоспособности «новизна» по действующему законодательству. При этом аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного устройства, отсутствуют.
Проверка соответствия заявляемого устройства условию патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений с целью выявления признаков, совпадающих с отличительными от выбранного прототипа, результаты которого показали, что заявленный объект явным образом не следует из известного уровня техники, определенного заявителем.
Другими словами, сравнение заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях контрольно-измерительной техники показало, что последние не содержат признаков, сходных с признаками, отличающими заявляемое техническое решение от прототипа.
Не выявлена известность влияния предусмотренных существенными признаками заявляемого технического решения преобразований на достижение указанных технических результатов.
При поиске по патентной и научно-технической литературе не выявлены устройства аналогичного назначения с признаками, сходными с отличительными признаками заявленного объекта, при этом совокупность его признаков не является очевидной из уровня техники, на основании чего можно сделать вывод, что предлагаемый объект соответствует условию патентоспособности «изобретательский уровень».
При этом следует отметить, что между совокупностью существенных признаков настоящего изобретения и достигаемыми техническими результатами существует причинно-следственная связь, поскольку отличительные признаки не были выявлены ни в одном из аналогов, а достигаемые технические результаты получаются лишь при совместном использовании всех без исключения известных и отличительных признаков.
Сущность изобретения.
Сущность изобретения иллюстрируется чертежами, где показаны:
- на фиг.1 - общий вид устройства (для случая, когда «внутренние» и «внешние» оптоэлектронные головки реализуют триангуляционный метод измерений);
- на фиг.2 - то же самое, вид устройства слева;
- на фиг.3 - общий вид устройства (для случая, когда «внутренние» оптоэлектронные головки реализуют триангуляционный, а «внешние» оптоэлектронные головки - теневой методы измерений);
- на фиг.4 - то же самое, вид устройства слева;
- на фиг.5 - конструкция держателя вилок (а - вид слева, б - вид справа);
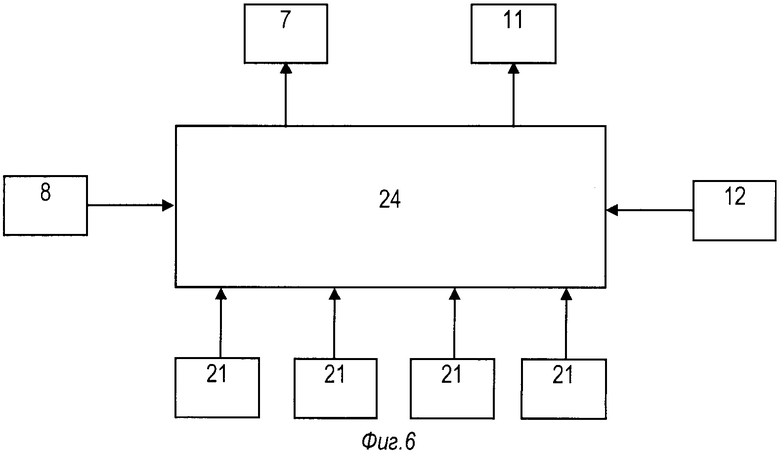
- на фиг.6 - основные электрические связи в устройстве;
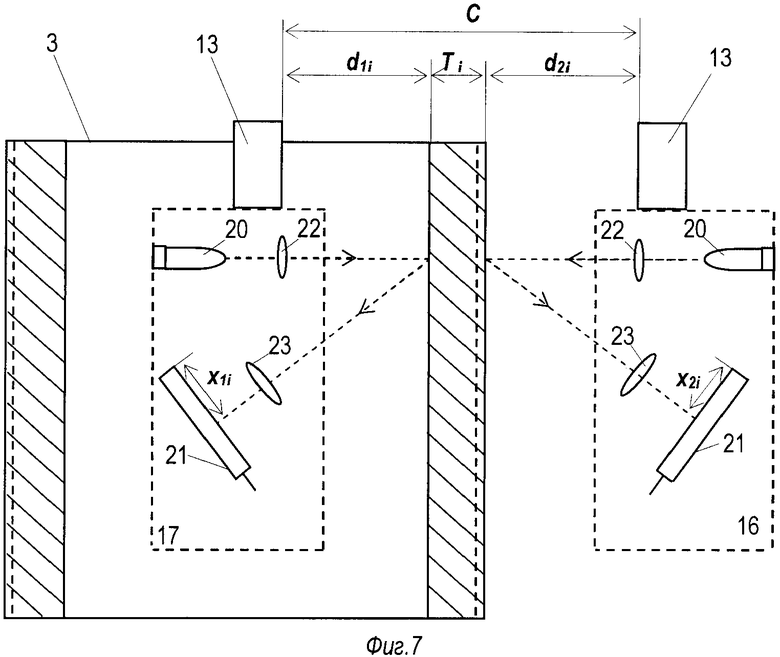
- на фиг.7 - принцип измерения толщины изделия при триангуляционном методе измерения;
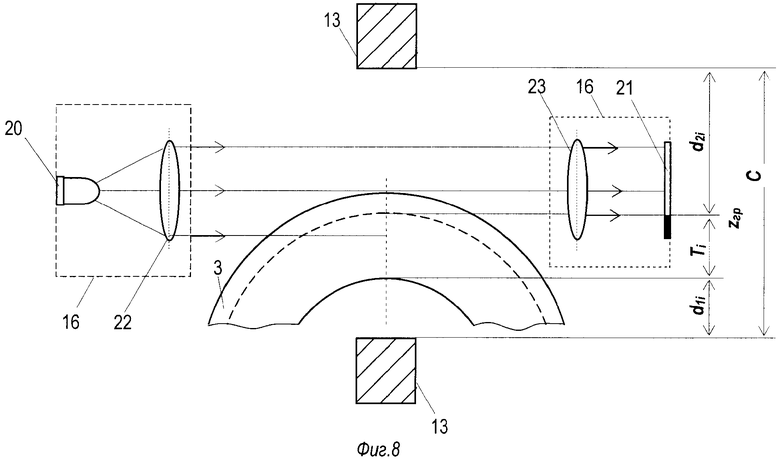
- на фиг.8 - принцип измерения толщины изделия при триангуляционно-теневом методе измерения;
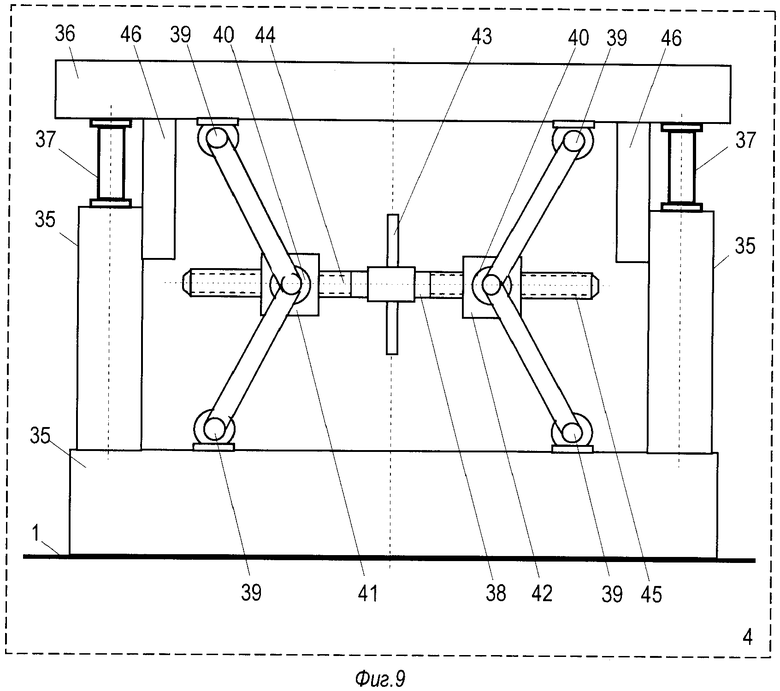
- на фиг.9 - конструкция узла совмещения осей.
Описание устройства в статике.
Устройство для контроля геометрических параметров цилиндрических изделий с резьбовой поверхностью содержит (фиг.1-6) основание 1, на котором размещены узел 2 базирования контролируемого изделия 3 и узел 4 совмещения осей, координатный стол 5, размещенный на узле совмещения осей 4, выполненный с возможностью перемещения вдоль продольной оси 6 контролируемого изделия 3 и связанный с электроприводом 7 линейного перемещения и датчиком 8 линейного перемещения, полый цилиндрический корпус 9, выполненный с возможностью вращения вокруг своей продольной оси 10 и связанный с электроприводом 11 углового перемещения и датчиком 12 углового перемещения, узел сканирования, имеющий первую 13 и вторую 14 вилки и держатель 15 вилок с механизмом регулировки расстояния между вилками 13 и 14, средства для съема информации, размещенные на концах вилок 13 и 14 и выполненные в виде оптоэлектронных головок 16-19, каждая из которых снабжена источником 20 светового потока, приемником 21 светового потока и соответствующими объективами 22 и 23 (фиг.2), и средство обработки информации, выполненное в виде персональной электронной вычислительной машины (ПЭВМ) 24 (фиг.6), входы которой соединены с выходами датчика 8 линейного перемещения, датчика 12 углового перемещения и приемников 21 светового потока оптоэлектронных головок 16-19, а выходы - с электроприводами линейного 7 и углового 11 перемещений.
Держатель 15 вилок жестко соединен с полым цилиндрическим корпусом 9 и выполнен П-образным, причем в средней части он имеет продольный паз 25, а на его концах имеются сквозные отверстия 26 (фиг.5).
Торцы вилок 13 и 14 размещены в продольном пазе 25, где крепятся к держателю 15 с помощью двух болтов 27 и имеют резьбовые отверстия 28 и 29 (фиг.1) соответственно с правой и левой резьбой.
Механизм регулировки расстояния между вилками 13 и 14 выполнен в виде подстроечного вала 30, концы которого размещены в отверстиях 26 на концах держателя 15, и снабженного участками с правой 31 и левой 32 резьбой, установленными в резьбовых отверстиях 28 и 29 торцов соответствующих вилок 13 и 14.
Цилиндрический корпус 9 установлен в подшипниках 33 и 34 на координатном столе 5.
Узел 4 совмещения осей содержит (фиг.9) нижнюю секцию 35, установленную на основании 1, и верхнюю секцию 36, выполненную с возможностью перемещения относительно нижней секции 35 и снабженную набором съемных подставок 37 разной высоты, попарно размещаемых между нижней 35 и верхней 36 секциями, и раздвижным четырехзвенным шарнирным механизмом пантографного типа с настроечным винтом 38, причем шарниры 39 механизма размещены попарно на нижней 35 и верхней 36 секциях, а шарниры 40 - по одному на первой 41 и второй 42 втулках, а настроечный винт 38 снабжен рукояткой 43 и участками с правой 44 и левой 45 резьбой, размещенными в соответствующих резьбовых отверстиях первой 41 и 42 второй втулок. Верхняя секция снабжена направляющими 46.
В устройстве, показанном на фиг.1 и 2, в каждой из оптоэлектронных головок 16-19 приемник 21 светового потока установлен с возможностью триангуляционной оптической связи с источником 20 светового потока через соответствующую внутреннюю или наружную поверхность контролируемого изделия 3.
В устройстве, показанном на фиг.3 и 4, в оптоэлектронных головках 16 и 19, размещенных над наружной поверхностью контролируемого изделия 3, приемник 21 светового потока и источник 20 светового потока установлены на конце соответствующей вилки 13 и 14 по разные стороны от контролируемого участка изделия 3 и реализуют теневой метод измерения.
Назначение и функции элементов и узлов устройства.
Основание 1 - главный несущий и связующий конструктивный элемент устройства, выполненный в виде платформы с возможностью размещения на ней узла 2 базирования и узла 4 совмещения осей. Основание 1 обеспечивает также устойчивость устройства во время выполнения операций контроля.
Узел 2 базирования предназначен для базирования и крепления на основании 1 контролируемого изделия 3.
Узел 4 совмещения осей предназначен для регулирования высоты продольной оси 10 цилиндрического корпуса 1 и совмещения ее с продольной осью 6 контролируемого изделия 3, т.е. для обеспечения их соосности. При этом, ввиду того, что во время работы устройства регулировка высоты оси 10 производится относительно редко, узел 4 выполнен с ручным приводом. В качестве узла 4 могут быть использованы, например, домкраты легковых автомобилей различных конструкций, электроприводы, преобразующие вращение ротора электродвигателя в поступательное движение штока.
Координатный стол 5 во время измерений перемещается по узлу 4 по его направляющим 47, обеспечивая тем самым перемещение узла сканирования вдоль оси 6 контролируемого изделия 3 (фиг.1). Непосредственное перемещение стола 5 осуществляется электроприводом 7. Координаты положения стола 5 отсчитываются датчиком 8.
Цилиндрический корпус 9 предназначен для двух целей:
а) для передачи перемещающих и вращающих усилий от электроприводов 7 и 11 к держателю 15 вилок;
б) для перераспределения механических сил со стороны узла сканирования между подшипниками 33 и 34 (у прототипа данные силы действуют на один единственный подшипник).
Оптоэлектронные головки 16-19 предназначены для преобразования оптических сигналов, несущих информацию о координатах точек внутренней или внешней поверхности контролируемого изделия 3 в соответствующие электрические сигналы. В описании даны два варианта выполнения оптоэлектронных головок 16 и 19, реализующих триангуляционный или теневой методы измерений. В обоих случаях источники 20 светового потока могут быть реализованы на основе источника узкого светового луча - полупроводникового лазера, а приемник 21 светового потока может быть реализован на основе позиционно-чувствительных фотоприемников - интегральных МДП (SMOS)-фотодиодных линеек.
При этом следует отметить, что диапазон изменения толщины стенок для большинства контролируемых изделий 3 (труб и муфт) на практике небольшой (от 6 до 16 мм). В результате измеритель толщины, настроенный на измерение максимальной толщины, без регулировки может быть использован для измерения изделий с меньшей толщиной стенок (до 6 мм).
Диапазон изменения диаметров контролируемых изделий 3 (труб и муфт) относительно большой (60-400 мм). Поэтому изменение диаметра контролируемого изделия 3 потребует изменения настройки устройства на его соответствующий диаметр.
Механизм регулировки расстояния между вилками 13 и 14 предназначен для адаптации устройства к измерению геометрических параметров цилиндрических изделий разного диаметра.
Средство обработки информации, выполненное в виде персональной электронной вычислительной машины (ПЭВМ) 24, предназначено для хранения и реализации программы измерения и контроля резьбовых изделий 3.
Описание устройства в динамике.
В устройстве могут быть реализованы триангуляционный или триангуляционно-теневой методы измерений. В любом случае работа устройства проходит в несколько этапов.
1. Базирование и фиксация изделия 3, предназначенного для контроля, перед узлом сканирования устройства.
2. Настройка соосности контролируемого изделия 3 и цилиндрического корпуса 9.
Необходимость такой настройки вызвана тем, что при смене типоразмера изделия 3, размещенного в узле 2 базирования, меняется высота оси 6 над основанием 1. Чем больше диаметр контролируемого изделия 3, тем больше высота оси 6 над основанием 1 и тем больше нужно поднять ось 10 цилиндрического корпуса 9. Для регулировки указанной высоты используется узел 4 совмещения осей.
В устройстве имеется набор подставок 37 разной высоты (по 2 шт. каждая), соответствующие различным диаметрам цилиндрических изделий 3. Вращая рукоятку 43, добиваются такой высоты подвижной секции 36 над неподвижной секцией 35, чтобы появилась возможность размещения соответствующих подставок 37 на нижней секции 35 (см. фиг.9). После этого, вращая рукоятку 43 в обратном направлении, опускают секцию 36 на эти подставки 37. В результате происходит совмещение оси 10 с осью 6.
3. Настройка расстояния между вилками 13 и 14.
Необходимость такой настройки вызвана тем, что при смене типоразмера цилиндрического изделия 3, размещенного в узле 2 базирования, меняется его диаметр, т.е. расстояние между диаметрально противоположными участками изделия 3. Чем больше диаметр изделия 3, тем больше должно быть расстояние между вилками 13 и 14 и наоборот.
Для регулировки указанного расстояния ослабляют оба крепежных болта 27 на держателе 15. Вращая настроечный вал 30 с помощью рукоятки 48, добиваются необходимого расстояния между вилками 13 и 14 и затягивают болты 27.
4. Ввод в ПЭВМ 24 программы контроля изделия 3 данного типоразмера.
В ПЭВМ 24 вводятся необходимые исходные данные и соответствующая программа контроля.
5. Выполнение контрольных измерений.
По сигналу с ПЭВМ 24 запускается электропривод 7 (фиг.6 и 1). В результате перемещения подвижной каретки 5 оптоэлектронные головки 16-19 занимают заданное программой контроля исходное линейное положение L0 вдоль оси 6, соответствующее началу измерений. При этом такое положение оптоэлектронных головок 16-19 контролируется датчиком 8, с выхода которого соответствующие коды поступают на вход ПЭВМ 24.
По сигналу с ПЭВМ 24 запускается электропривод 11. В результате поворота цилиндрического корпуса 9 оптоэлектронные головки 16-19 также занимают заданное исходное угловое положение α0, соответствующее началу измерений. При этом указанное угловое положение оптоэлектронных головок контролируется датчиком 12, с выхода которого соответствующие коды поступают на вход ПЭВМ 24.
Примечание. Установка оптоэлектронных головок 16-19 в исходные линейное и угловое положения может выполняться одновременно.
Далее по сигналу с ПЭВМ 24 запускается электропривод 7. В результате перемещения координатного стола 5 оптоэлектронные головки 16-19 начинают перемещаться вдоль оси 6. При этом последовательность кодов координат Li с выхода датчика 8 непрерывно поступают на вход ПЭВМ 24. А с выхода датчика 12 на вход ПЭВМ 24 одновременно поступает последовательность одних и тех же кодов угла α0, т.е. угловое положение оптоэлектронных головок 16-19 при этом не меняется.
В процессе перемещения оптоэлектронных головок 16-19 их источники 20 непрерывно генерируют узкие световые лучи. В результате эти лучи через объективы 22 направляются на контролируемые внутренние и наружные поверхности изделия 3 и отражаются от нее.
Изображение светового пятна, формируемого по диффузной (рассеянной) составляющей отраженного лазерного луча, проецируется через объективы 23 на соответствующие светочувствительные элементы многоэлементных фотоприемников 21 в виде световых марок. Схема развертки фотоприемников 21 (на чертеже для простоты не показана) формирует тактовые импульсы, обеспечивающие оптоэлектронное преобразование изображений световой марки на его элементах.
В соответствии с триангуляционным методом измерения, который реализуется в данном устройстве, изменения координат х1i и х2i указанной световой марки на элементах фотоприемников 21 соответствуют дальностям d1i и d2i до соответствующих точек поверхности изделия 3, т.е. изменениям профиля сечения изделия 3 (фиг.7).
Изображение световой марки вызывает изменение уровней напряжения в отдельных элементах фотоприемников 21, вследствие чего распределение выходных сигналов элементов во времени пропорциональны пространственному распределению интенсивности света по сечению световой марки на элементах фотоприемников 21. Информационные сигналы с выхода фотоприемников 21 поступают на входы ПЭВМ 24 для последующей обработки согласно хранящейся в ней программы.
Согласно данной программы контроля в устройстве измерение дальностей d1i и d2i до точек поверхности изделия 3 сопровождается фиксацией соответствующих координат Li и α0, коды которых также записываются в память ПЭВМ 24.
В результате такого перемещения оптоэлектронных головок 16-19 в памяти ПЭВМ 24 формируются две противоположные профилограммы сечения внутренней поверхности и две противоположные профилограммы наружной поверхности изделия 3, причем при одном и том же угловом положении вилок 13 и 14.
Указанные измерения и запоминание результатов таких измерений в памяти ПЭВМ 24 продолжаются до тех пор, пока оптоэлектронные головки 16-19 не достигнут заданной программой координаты конечной точки вдоль оси 6.
С достижением указанной точки ПЭВМ 24 останавливает электропривод 7 и включает электропривод 11, поворачивающий цилиндрический корпус 9, а следовательно, оптоэлектронные головки 16-19 на некоторый заданный угол Δα вокруг продольной оси 6.
Далее включается электропривод 7, вал которого начинает вращаться теперь уже в обратном направлении. В результате оптоэлектронные головки 16-19 перемещаются в противоположном направлении, не меняя при этом нового углового положения, равного (α0+Δα). Вновь последовательность кодов координат Li с выхода датчика 8 непрерывно поступают на вход ПЭВМ 24, а с выхода датчика 12 на вход ПЭВМ 24 поступает последовательность одних и тех же кодов угла (α0+Δα).
При этом вновь источники 20 оптоэлектронных головок 16-19 непрерывно генерируют узкие световые лучи в направлении противоположных контролируемых поверхностей изделия 3, часть которых отражается и используется для измерения дальности di до этих поверхностей указанным выше образом. Соответствующие сигналы с выходов фотоприемников 21 поступают на вход ПЭВМ 24 и записываются в ее память.
Дальнейшие измерения производятся аналогично описанному выше и продолжаются до тех пор, пока каждая из оптоэлектронных головок 16-19 не повернется на пол-оборота вокруг оси 6 контролируемого изделия 3, что достаточно для получения полной информации о профиле внутреннего и наружного поверхностей изделия 3, поскольку каналов снятия информации по каждой поверхности - два.
5. Обработка полученных результатов измерений и принятие решения о пригодности контролируемого изделия.
К концу измерений в памяти ПЭВМ 24 формируются коды дальностей di до точек поверхности изделия 3 для разных αi, по которым в ПЭВМ 24 программным путем производится расчет координат n1i и n2i точек контура профиля при разных углах сечения, расчет параметров внутренней или наружной резьбы изделия 3 (шаг и высота витков, конусность профиля, углы наклона профиля витков, радиусы вершин и впадин витков и т.д.), а также толщина стенок изделия 3 согласно формулы (1).
Полученные таким образом параметры сопоставляются с эталонными (заданными) параметрами изделия 3. Если измеренные параметры резьбы изделия 3 и толщина его стенки не выходят за пределы допусков, выносится решение о пригодности изделия 3 к дальнейшей эксплуатации.
Оптоэлектронные головки 16 и 19, если они реализуют теневой метод (фиг.3, 4, 8), их источники 20 с помощью объективов 22 генерируют параллельный световой пучок, практически полностью направляемый на многоэлементный фотоприемник 21. Часть этого пучка перекрывается измеряемым участком (профилем) резьбы (фиг.8), в результате чего некоторые фотоэлементы фотоприемника 21 оказывается освещенными, а другие - неосвещенными, что определяется профилем участка резьбы. Соответствующие сигналы с выходов фотоэлементов поступают на вход ПЭВМ 24 и записываются в ее память.
Программная обработка в ПЭВМ 24 в данном случае отличается от триангуляционного метода лишь тем, что на основе сопоставления кодов сигналов с соседних элементов многоэлементного фотоприемника 21 производится выделение на нем границы «свет-тень» и определение координаты zгp соответствующей точки на поверхности изделия 3, которая, как показано на фиг.8, может быть использована для определения дальностей di до точек поверхности изделия 3 для разных αi. По этим данным в ПЭВМ 24 программным путем аналогично описанному выше производится расчет координат n1i и n2i точек контура профиля при разных углах сечения, расчет параметров внутренней или наружной резьбы изделия 3 (шаг и высота витков, конусность профиля, углы наклона профиля витков, радиусы вершин и впадин витков и т.д.), а также толщина стенок изделия 3 согласно формулы (1).
После завершения измерений изделие 3 снимается с узла 2 и производится загрузка следующего изделия 3, подлежащего контролю.
Если требуется произвести контроль изделия другого диаметра, описанным выше образом производится перенастройка устройства.
Таким образом, предложенная совокупность существенных признаков оптоэлектронного устройства контроля изделий позволяет:
а) обеспечить уравновешенность устройства как механической системы. При этом, в качестве противовеса к первой вилке 13 используется вторая вилка 14 с соответствующими головками 18 и 19. Дополнительное снижение боковых нагрузок на подшипник 33 обеспечивается использованием подшипника 34;
б) расширить функциональные возможности устройства путем обеспечения возможности измерения толщины стенок цилиндрических изделий типа труб и муфт к ним.
Проверка соответствия заявляемого устройства условию патентоспособности «промышленная применимость».
По мнению заявителя, сведения, приведенные в описании, достаточны для осуществления устройства. Такое устройство для контроля геометрических параметров цилиндрических изделий с резьбовой поверхностью не вызывает затруднений при его изготовлении, а возможность промышленного применения заявленного технического решения подтверждается, например, успешным внедрением одного из вариантов его реализации на нефтедобывающем предприятии в Западной Сибири для контроля труб и муфт диаметрами 146 мм, 168 мм, 178 мм, 194 мм, 219 мм, 245 мм. При этом авторами для эксплуатации данного устройства разработано специальное программное обеспечение.
Совокупность существенных признаков, характеризующих сущность изобретения, в принципе может быть многократно использована, например, при ремонте нефтяного оборудования и скважин с получением указанных выше технических результатов.
Таким образом, вышеизложенные сведения свидетельствуют для заявленного изобретения, как оно охарактеризовано в независимом пункте формулы, о возможности его осуществления с помощью известных и предложенных методов и средств. Указанное позволяет сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству,
Обобщая вышеизложенное можно отметить, что заявляемое устройство контроля отвечает требуемым условиям патентоспособности и обладает значительными преимуществами по сравнению с известными устройствами контроля.
Источники информации
1. Вальков В.М. Контроль в ГАП. Л.: Машиностроение, 1986, с.102-103, рис.3.19, б.
2. Промышленное применение лазеров / Кебнер Г. и др. Под ред. Г.Кебнера, пер. с англ. под ред. И.В.Зуева, М.: Машиностроение, 1988, с.266-267, рис.16.10.
3. Авторское свидетельство СССР №1647249. Фотоэлектрическое устройство для измерения профиля и толщины изделий сложной формы. МПК G06В 21/00. БИ №17, 07.05.88 г.
4. Решение от 14 мая 2008 года о выдаче патента по заявке №2006142438/28 «Оптоэлектронное устройство контроля наружной резьбы трубных изделий».
5. Патент РФ №2311610. Оптоэлектронное устройство контроля параметров резьбы. Публ. 27.11.2007 г.
6. Патент РФ №2267086. Устройство для контроля параметров резьбовых трубных изделий. Публ. 27.12.2005 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ РЕЗЬБЫ ТРУБНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2342632C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ С ВНУТРЕННЕЙ РЕЗЬБОЙ | 2007 |
|
RU2357204C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377494C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ТОЛЩИНЫ ЛИСТОВОГО ПРОКАТА | 2010 |
|
RU2458318C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ НАРУЖНОЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2151999C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2299400C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ РЕЗЬБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152000C1 |
Изобретение относится к контрольно-измерительной технике. Заявленное устройство содержит основание, на котором установлен узел базирования контролируемого изделия, координатный стол, выполненный с возможностью перемещения вдоль продольной оси контролируемого изделия и связанный с датчиком линейного перемещения и электроприводом линейного перемещения, цилиндрический корпус, узел сканирования, имеющий первую вилку и средства для съема информации, датчик углового перемещения и электропривод углового перемещения. А также средство обработки информации, выполненное в виде персональной электронной вычислительной машины (ПЭВМ), размещенный на основании узел совмещения осей, на котором установлен координатный стол. Цилиндрический корпус выполнен с возможностью вращения вокруг продольной оси и установлен на двух подшипниках на координатном столе, узел сканирования имеет установленную симметрично первой вилке вторую вилку и держатель вилок с механизмом регулировки расстояния между вилками. Технический результат - расширение функциональных возможностей устройства, обеспечение возможности работы устройства в промышленных условиях. 3 з.п. ф-лы, 9 ил.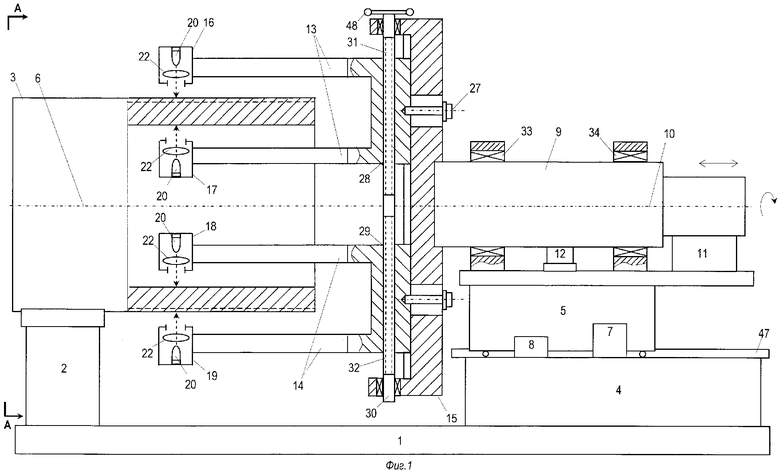
1. Устройство для контроля геометрических параметров цилиндрических изделий с резьбовой поверхностью, содержащее:
основание, на котором установлен узел базирования контролируемого изделия,
координатный стол, выполненный с возможностью перемещения вдоль продольной оси контролируемого изделия и связанный с датчиком линейного перемещения и электроприводом линейного перемещения,
цилиндрический корпус,
узел сканирования, имеющий первую вилку и средства для съема информации,
датчик углового перемещения и электропривод углового перемещения,
средство обработки информации, выполненное в виде персональной электронной вычислительной машины (ПЭВМ), входы которой подключены к выходам датчиков линейного и углового перемещений, а выходы - к электроприводам линейного и углового перемещений,
отличающееся тем, что
содержит размещенный на основании узел совмещения осей, на котором установлен координатный стол,
цилиндрический корпус выполнен с возможностью вращения вокруг продольной оси и установлен на двух подшипниках на координатном столе,
узел сканирования имеет установленную симметрично первой вилке вторую вилку и держатель вилок с механизмом регулировки расстояния между вилками, при этом держатель вилок жестко соединен с цилиндрическим корпусом, связанным с датчиком углового перемещения и электроприводом углового перемещения,
на концах вилок размещены средства для съема информации, выполненные в виде оптоэлектронных головок, каждая из которых снабжена источником светового потока и приемником светового потока, причем приемник светового потока установлен с возможностью триангуляционной оптической связи с источником светового потока через соответствующий участок внутренней или наружной поверхности контролируемого изделия, а выходы приемников светового потока подключены ко входам ПЭВМ.
2. Устройство по п.1, отличающееся тем, что
держатель вилок выполнен П-образным и имеет в средней части продольный паз, а на концах держателя вилок выполнены отверстия,
торцы вилок размещены в продольном пазе держателя вилок и имеют отверстия соответственно с правой и левой резьбой,
а механизм регулировки расстояния между вилками выполнен в виде подстроечного вала, концы которого размещены в отверстиях на концах держателя вилок и снабженного участками с правой и левой резьбой, установленными в резьбовых отверстиях торцов соответствующих вилок.
3. Устройство по пп.1 и 2, отличающееся тем, что узел совмещения осей содержит нижнюю секцию, установленную на основании, и верхнюю секцию, выполненную с возможностью перемещения относительно нижней секции и снабженную набором съемных подставок, попарно размещаемых между нижней и верхней секциями, и раздвижным четырехзвенным шарнирным механизмом пантографного типа с настроечным винтом, причем шарниры механизма попарно размещены на нижней и верхней секциях и по одному на первой и второй втулках, а настроечный винт снабжен рукояткой и участками с правой и левой резьбой, размещенными в соответствующих резьбовых отверстиях первой и второй втулок.
4. Устройство по п.1, отличающееся тем, что в оптоэлектронных головках, размещенных над наружной поверхностью контролируемого изделия, источник светового потока и приемник светового потока установлены на соответствующем конце вилки по разные стороны от контролируемого участка изделия.
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБОВЫХ ТРУБНЫХ ИЗДЕЛИЙ | 2004 |
|
RU2267086C1 |
| RU 2006142438 A, 10.06.2008 | |||
| US 4544268 A, 01.10.1985 | |||
| US 4598998 A, 08.07.1986 | |||
| US 5712706 A, 27.01.1998. | |||

