Изобретение относится к бортовым системам автоматического управления летательными аппаратами, которые реализуют в процессе полета развороты со значительными углами атаки.
Известны системы управления летательными аппаратами, содержащие в канале тангажа задатчик сигнала управления, датчик угла тангажа, датчик угловой скорости по тангажу и суммирующий усилитель, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на рулевые приводы летательного аппарата [1]. Данные существенные признаки есть и в предлагаемом техническом решении. В устройстве-аналоге возможны режимы, когда угол атаки выходит за рамки допустимого, что снижает качество управления летательным аппаратом и существует вероятность выхода режимов полета за ограничения по прочности.
К известным решениям можно отнести введение дополнительных фильтров в канал управления для ограничения угла атаки [2]. Однако эти фильтры решают частные задачи, как и описано в [2], например, в условиях ветровых порывов; в то же время фильтры в прямой цепи ослабляют прохождение сигналов управления.
Наиболее близким к предлагаемому изобретению, принятым за прототип, является устройство управления каналом тангажа летательного аппарата, содержащее задатчик сигнала управления, датчик угла тангажа, датчик угловой скорости по тангажу и последовательно соединенные интегратор и суммирующий усилитель, причем выходы датчика угла тангажа и датчика угловой скорости по тангажу соединены соответственно со вторым и третьим входами суммирующего усилителя, выход которого является выходом устройства [3, с.194]. Все данные существенные признаки есть и в предлагаемом техническом решении.
В устройстве-прототипе [3], также как и в устройстве [2], возможны режимы, когда угол атаки выходит за рамки допустимого, что снижает качество управления летательным аппаратом и существует вероятность выхода режимов полета за ограничения по прочности.
Решаемой в предложенном устройстве технической задачей является расширение маневренных возможностей устройства и ограничение угла атаки.
Указанный технический результат достигается тем, что в известное устройство управления каналом тангажа летательного аппарата, содержащее задатчик сигнала управления, датчик угла тангажа, датчик угловой скорости по тангажу и последовательно соединенные интегратор и суммирующий усилитель, причем выходы датчика угла тангажа и датчика угловой скорости по тангажу соединены соответственно со вторым и третьим входами суммирующего усилителя, выход которого является выходом устройства, дополнительно введены последовательно соединенные задатчик опорного сигнала, первый и второй блоки умножения и функциональный ограничитель сигнала, выход которого подключен к входу интегратора, датчик скорости полета, подключенный через блок деления ко второму входу второго блока умножения, датчик скоростного напора, выход которого соединен со вторым входом блока деления, при этом выход задатчика сигнала управления соединен со вторым входом функционального ограничителя сигнала, и датчик текущего значения массы, выход которого соединен со вторым входом первого блока умножения.
Отличительными признаками предлагаемого технического решения являются то, что в устройство управления каналом тангажа летательного аппарата введены последовательно соединенные задатчик опорного сигнала, первый и второй блоки умножения и функциональный ограничитель сигнала, выход которого подключен ко входу интегратора, датчик скорости полета, подключенный через блок деления ко второму входу второго блока умножения, датчик скоростного напора, выход которого соединен со вторым входом блока деления, при этом выход задатчика сигнала управления соединен со вторым входом функционального ограничителя сигнала, и датчик текущего значения массы, выход которого соединен со вторым входом первого блока умножения.
Предложенное устройство управления каналом тангажа летательного аппарата позволяет расширить функциональные возможности управления летательным аппаратом и ограничить при этом угол атаки и тем самым повысить качество управления летательным аппаратом и вероятность невыхода режимов полета за ограничения по прочности.
На чертеже представлена структурная схема устройства управления каналом тангажа летательного аппарата.
Устройство содержит задатчик сигнала управления 1, датчик угла тангажа 2, датчик угловой скорости по тангажу 3 и последовательно соединенные интегратор 4 и суммирующий усилитель 5, последовательно соединенные задатчик опорного сигнала 6, первый блок умножения 7, второй блок умножения 8 и функциональный ограничитель сигнала 9, выход которого подключен к входу интегратора 4, датчик скорости полета 10,подключенный через блок деления 11 ко второму входу второго блока умножения 8, датчик скоростного напора 12, выход которого соединен со вторым входом блока деления 11, причем выходы датчика угла тангажа 2 и датчика угловой скорости по тангажу 3 соединены соответственно со вторым и третьим входами суммирующего усилителя 5, выход которого является выходом устройства, выход задатчика сигнала управления 1 соединен со входом функционального ограничителя сигнала 9, и датчик текущего значения массы 13, выход которого соединен со вторым входом первого блока умножения.
Устройство управления каналом тангажа летательного аппарата работает следующим образом.
Выходной сигнал управления σв формируется по сигналам интегратора 4-ϑу, датчика угла тангажа 2-ϑ и датчика угловой скорости
3-ωz в виде:

где σB - сигнал управления, формируемый суммирующим усилителем 5;
Kϑ, K - передаточные числа, выставляемые в суммирующем усилителе 5;
- передаточные числа, выставляемые в суммирующем усилителе 5;
ϑ - сигнал угла тангажа, поступающий от датчика 2;
ωz - сигнал угловой скорости по тангажу,  поступающий от датчика 3;
поступающий от датчика 3;
ϑу - сигнал управления, формируемый интегратором 4 по сигналу  функционального ограничителя сигнала 9:
функционального ограничителя сигнала 9:

При этом в базовом режиме - в условиях допустимых значений угла атаки:

где  - сигнал с выхода задатчика сигнала управления 1.
- сигнал с выхода задатчика сигнала управления 1.
В условиях функционирования устройства в составе системы управления летательного аппарата косвенно анализируется значение угла атаки летательного аппарата α (непосредственное измерение которого представляет известные трудности) и при приближении величины α к допустимому αдоп вводится ограничение в законе управления (1) в части формирования  . А именно, для решения поставленной технической задачи сигнал формируется от задатчика сигнала управления 1 по сигналу
. А именно, для решения поставленной технической задачи сигнал формируется от задатчика сигнала управления 1 по сигналу  при функциональном ограничении его величиной
при функциональном ограничении его величиной  .в блоке 9, т.е.
.в блоке 9, т.е.
Величина  формируется блоками 6, 7, 8, 10, 11 и 12 для блока 9 следующим образом.
формируется блоками 6, 7, 8, 10, 11 и 12 для блока 9 следующим образом.
Основным соотношением в переходных процессах по отработке управляющих воздействий является, как показано, например, в [2], соотношение для угла атаки α:

где:  - коэффициент подъемной силы летательного аппарата.
- коэффициент подъемной силы летательного аппарата.
Из уравнения (5):

где 
Таким образом, с точностью до динамической составляющей

Поскольку канал тангажа летательного аппарата отрабатывает заданную величину  , то, зная αдоп., можно оценить
, то, зная αдоп., можно оценить  :
:

Так как 
(см., например, [3, с.30]),
где:  - коэффициент подъемной силы;
- коэффициент подъемной силы;
ρ - плотность воздуха;
S - площадь крыла;
m - масса летательного аппарата,
V - скорость полета летательного аппарата, то из (8) с учетом (9) может быть получено соотношение:
где 
Датчик скоростного напора 11 выдает сигнал скоростного напора

Из (11) следует:

и тогда (10) перепишется:
По соотношению (13) формируется сигнал  (коэффициент в числителе Kα αдоп. выставлен в блоке 6 как заданная величина и поступает на первый вход первого блока умножения 7).
(коэффициент в числителе Kα αдоп. выставлен в блоке 6 как заданная величина и поступает на первый вход первого блока умножения 7).
Сигналы скорости полета V и скоростного напора q с соответствующих датчиков 10 и 12 делятся в блоке деления 11. Сигнал деления поступает на второй вход второго блока умножения 8, на выходе которого имеем сигнал  в соответствии с (10).
в соответствии с (10).
Таким образом, предложенное устройство управления каналом тангажа летательного аппарата позволяет расширить функциональные возможности управления летательным аппаратом и ограничить при этом угол атаки.
Все блоки устройства управления являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, например, по [4, 5].
Источники информации
1. Патент РФ №1751716, кл. G05B 13/02, 30.07.92.
2. «Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов» Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.616-618.
3. И.А.Михалев и др. «Системы автоматического управления самолетом» М.: Машиностроение, 1987, с.30, 194.
4. А.У.Ялышев, О.И.Разоренов. «Многофункциональные аналоговые регулирующие устройства автоматики». М.: Машиностроение, 1981, с.103.
5. В.Б.Смолов. «Функциональные преобразователи информации» Л.: Энергоиздат, Ленинградское отделение, 1981, с.55.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
Изобретение относится к области приборостроения и может быть использовано в бортовых системах автоматического управления летательными аппаратами. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство управления каналом тангажа летательного аппарата содержит задатчик сигнала управления, датчик угла тангажа, датчик угловой скорости по тангажу, интегратор, суммирующий усилитель, задатчик опорного сигнала, первый и второй блоки умножения, функциональный ограничитель сигнала, датчик скорости полета, блок деления и датчик скоростного напора. 1 ил.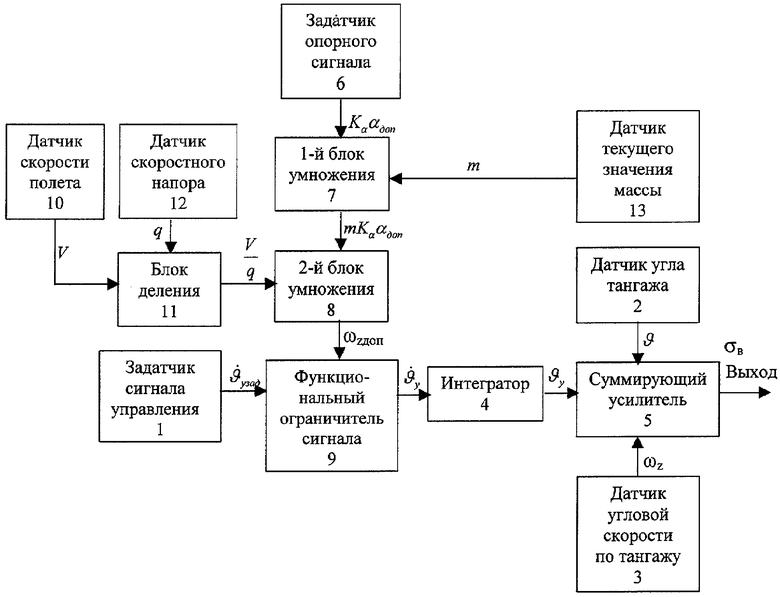
Устройство управления каналом тангажа летательного аппарата, содержащее задатчик сигнала управления, датчик угла тангажа, датчик угловой скорости по тангажу и последовательно соединенные интегратор и суммирующий усилитель, причем выходы датчика угла тангажа и датчика угловой скорости по тангажу соединены соответственно со вторым и третьим входами суммирующего усилителя, выход которого является выходом устройства, отличающееся тем, что содержит последовательно соединенные задатчик опорного сигнала, первый и второй блоки умножения и функциональный ограничитель сигнала, выход которого подключен к входу интегратора, датчик скорости полета, подключенный через блок деления ко второму входу второго блока умножения, датчик скоростного напора, выход которого соединен со вторым входом блока деления, при этом выход задатчика сигнала управления соединен со вторым входом функционального ограничителя сигнала, и датчик текущего значения массы, выход которого соединен со вторым входом первого блока умножения.
| И.А.Михалев и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.30, 194 | |||
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Математическое и программное обеспечение системы автономной навигации КА «Янтарь» | |||
| - М.: МО СССР, 1986 | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| DE 19510910 А1, 28.09.1995 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

