Предлагаемое изобретение относится к области судовождения, в частности автоматическому управлению движением корабля без хода в вертикальной плоскости.
Известны способы автоматического управления движением корабля в вертикальной плоскости, обеспечивающие переход корабля по глубине с использованием гидродинамических исполнительных средств [Патент России №2305050, б.и. №24 от 27.08.07]. Также известен способ управления движением подводного аппарата без хода, принятый нами в качестве прототипа, с использованием цистерн, скорость изменении силы плавучести в которых не больше 30 кг/с [Корчанов В.М. и др. Исследование задачи управления морскими подвижными объектами при потере хода. // Труды XXXI V Всероссийской конференции. ИПУ РАН, 2007, а также патент России №2306239, б.и. №26 от 20.09.06]. В известном способе закон управления цистернами имеет вид:

где Р - сила плавучести, создаваемая продуванием-заполнением цистерн,
Δh=(h-hзд.) - сигнал задания перехода по глубине,
h, hзд. - текущая и заданная глубина корабля,
соотношение коэффициентов регулирования при K1=1:
К2=(10-70)К1, К3=(50-200)К1.
Приведенный закон управления предусматривает использование первой и второй производных от h с высокой крутизной, а также цистерн с производительностью <0.03 т/с.
Водоизмещение корабля превышает десятки тысяч тонн, поэтому переход по глубине корабля без хода будет весьма затянут. Ускорить процесс перехода при замкнутом законе управления (1) нельзя. Применение замкнутого закона управления цистернами с высокой производительностью при недостоверном измерении силы плавучести приведет к раскачке замкнутой системы управления. Неэффективность использования рассмотренного способа автоматического управления очевидна.
Цель изобретения - создать способ автоматического перехода корабля без хода по глубине с высокой скоростью изменения глубины в процессе перехода.
Предлагаемый способ управления позволяет осуществить ускоренный переход корабля по глубине с использованием больших сил плавучести Р (по сравнению со способом, приведенным выше), т.к. базируется на двух этапах программного разомкнутого временного управления:
- с использованием при переходе на заданную глубину по одному программному импульсу силы плавучести в каждом этапе управления;
- с использованием двух цистерн, расположенных в районе центра тяжести корабля, причем в исходном (балансировочном) состоянии первая цистерна полностью продута, а вторая полностью заполнена водой (это позволяет реализовать более точно заданный импульс силы плавучести);
- при погружении корабля на первом этапе управления заполняется первая цистерна до заданного временной программой уровня с последующим полным продуванием;
- при всплытии корабля на первом этапе управления продувается вторая цистерна по программе до заданной величины с последующим полным заполнением;
- выбор расчетной временной программы первого этапа управления Р1 производят по начальной (заданной) величине перехода Δh0;
- выбор и момент включения расчетной временной программы второго этапа управления (Р2 прог. или P2 корр.) производят с устранением накопившихся ошибок при выполнении программного управления первого этапа. Момент включения осуществляют при достижении измеренным сигналом величины перехода (рассогласования) по глубине расчетного программного значения, а выбор вида программы второго этапа производят с учетом величины отклонения текущего (измеренного) ускорения d2h/dt2 и скорости изменения глубины dh/dt от программных значений ускорения d2h одерж.прог./dt2 и скорости изменения глубины dh одерж.прог./dt в расчетной точке включения второго импульса силы плавучести (при Δh=Δh одерж.прог.).
Реализация способа ускоренного перехода корабля по глубине основана на использовании датчика и задатчика глубины, блока задания и штатной системы управления по глубине. Сигналы текущей и заданной глубины h, hзд. используют для формирования начальной (заданной) величины перехода по глубине: Δh0=h0-hзд., где h0 - глубина в начальный момент перехода. Из блока задания Δh0 подают в штатную систему управления по глубине для отключения ее.
Для формирования импульсов силы плавучести используют: блок временных программ, две цистерны (быстрого заполнения-продувания), датчики ускорения и скорости изменения глубины корабля.
Сигнал начальной величины перехода Δh0 вводят в блок временных программ для выбора расчетных временных программ импульсов силы плавучести Р1, Р2 прог. (P2 корр.) первого и второго этапов управления цистернами:

Сигнал выбранной программы P1 из блока временных программ вводят на вход двух цистерн.
Формирование сигналов программы второго этапа управления цистернами производится при выполнении условия:

где h одерж.прог.=f3 (P1) - расчетное значение глубины, когда должно производиться включение второй расчетной программы управления Р2 прог..
Сигнал второй расчетной программы управления формируют вида:

где dh одерж.прог./dt - программная скорость изменения глубины в расчетной точке включения второго импульса силы плавучести, d2h одерж.прог./dt2 - программное ускорение глубины в расчетной точке включения второго импульса силы плавучести.
Сигнал второй расчетной программы Р2 прог. вводится для управления цистернами быстрого заполнения-продувания, если удовлетворяются неравенства, формируемые в блоке временных программ:

Процесс управления переходом заканчивается, когда сигнал рассогласования по глубине будет:

Если зависимость (5) не удовлетворяется, то в блоке временных программ формируют сигнал корректированной программы второго этапа управления цистернами Р2 корр.:

Сигнал корректированной программы Р2 корр. вводят на вход цистерн.
Процесс ускоренного перехода корабля по глубине заканчивается, когда сигнал рассогласования по глубине будет меньше допустимой величины С0 в соответствии с зависимостью (6).
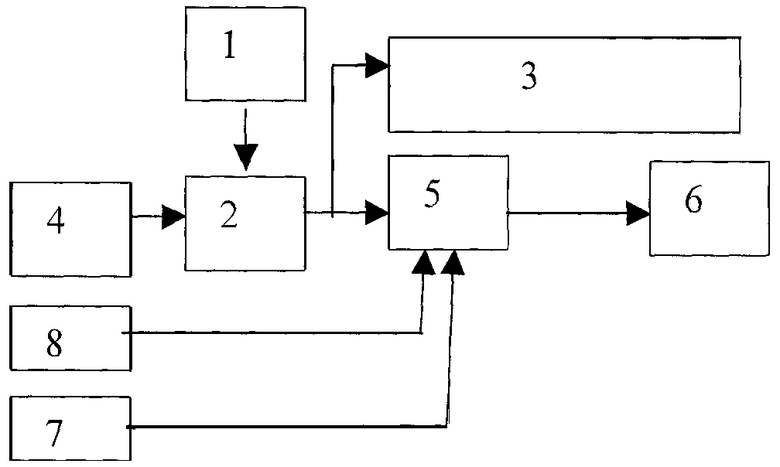
Описание работы аппаратуры ускоренного перехода корабля по глубине (см. чертеж).
На чертеже приведена блок-схема аппаратуры ускоренного перехода корабля по глубине, содержащая: задатчик глубины 1, блок задания 2, штатную систему управления по глубине 3, датчик глубины 4, блок временных программ 5, две цистерны (быстрого заполнения-продувания) 6, датчики ускорения и скорости изменения глубины 7, 8.
Аппаратура может реализовываться с использованием типовых датчиков измерителей:
- глубины 4 с чувствительностью измерения выше 1 м.
- скорости изменения глубины 8 с чувствительностью выше 0.3 м/с,
- ускорения глубины с чувствительностью выше 0.01 м/с2.
В качестве блока временных программ 5 может использоваться типовой микроконтроллер. Блок формирования задания 2 может реализовываться на микросхеме 140 УД 8. Две цистерны быстрого изменения плавучести 6 должны быть равнозначными по емкости.
Судоводитель задатчиком глубины 1 вводит заданную глубину hзд., которая поступает в блок задания 2. В блок 2 также вводится сигнал текущей глубины h с датчика глубины 4 для формирования сигнала задания начального (заданного) перехода по глубине: Δh0=h0-hзд..
Сигнал начального перехода по глубине Δh0 вводят на исполнительную часть штатной системы управления по глубине 3 для отключения ее. Сигнал Δh0 также вводят на вход блока временных программ 5, в котором осуществляется выбор временной программы заполнения (или продувания) цистерн в функции от перехода по глубине Δh0:
Р1=f(t, Δh0).
В блок 5 введены расчетные временные программы первого и второго этапов перехода по глубине автоматизируемого корабля. Программы составлены на основе моделирования оптимального по времени (или экономичности) перехода корабля на заданную глубину. Сигнал программы P1 из блока 5 поступает на управление двумя цистернами 6. Процесс программного импульсного управления P1=f(t, Δh0) двумя цистернами продолжается до достижения кораблем глубины, соответствующей включению второго этапа управления: |h-h одерж.прог.|<C1.
В процессе перехода корабля по глубине измеряются текущие ускорения и скорость изменения глубины датчиками 7, 8, выходы которых подключены к блоку программного управления 5. В момент равенства текущей измеренной глубины h программному значению глубины сдерживания h одерж.прог., если удовлетворяется условие (5), сигнал программы Р2 прог. из блока 5 поступает на управление двумя цистернами 6. Процесс автоматического управления переходом на hзд. заканчивается при удовлетворении условия (6), которое формируется в блоке 5.
При неудовлетворении условия (5) сформированный сигнал программы Р2 корр. в соответствии с зависимостью (7) водится на вход двух цистерн 6. Процесс автоматического управления переходом на hзд. заканчивается при удовлетворении условия (6).
Проведенное моделирование автоматического перехода по глубине с использованием описанной выше аппаратуры позволяет утверждать, что время перехода может быть сокращено более чем на порядок по сравнению с известными способами управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1996 |
|
RU2111892C1 |
| АВТОНОМНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СЖАТЫМ ВОЗДУХОМ ЦИСТЕРНЫ БЫСТРОГО ПОГРУЖЕНИЯ ПОДВОДНОЙ ЛОДКИ С ЦЕЛЬЮ ПРОДУВАНИЯ БАЛЛАСТА НЕЗАВИСИМО ОТ ОБЩЕГО ЗАПАСА ВОЗДУХА ВЫСОКОГО ДАВЛЕНИЯ И СОСТОЯНИЯ ОБЩЕЙ СИСТЕМЫ | 2011 |
|
RU2748092C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ФАЗОВОГО СОСТОЯНИЯ СУДНА | 2002 |
|
RU2221726C1 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| СПОСОБ ДИСТАНЦИОННОГО МИНИРОВАНИЯ | 2015 |
|
RU2600038C1 |
Изобретение относится к области судовождения и касается автоматического управления движением корабля без хода в вертикальной плоскости. Способ базируется на двух этапах программного управления с использованием датчика и задатчика глубины, блока задания, в котором формируют заданный сигнал перехода по глубине. Последний вводят в блок временных программ для выбора программы первого этапа импульсного управления двумя цистернами. Формирование второго этапа импульсного управления производят при равенстве измеренного сигнала глубины расчетному значению сдерживания глубины, при которой по программе должен начинаться второй этап управления. При равенстве (близости) измеренных сигналов скорости изменения глубины и ускорения глубины расчетным значениям скорости и ускорения в точке сдерживания глубины формируют программное управление второго этапа Р2 прог. двумя цистернами. При отклонении измеренных значений скорости изменения глубины или ускорения от программных значений скорости сдерживания глубины или ускорения формируют сигнал корректированной временной программы второго этапа импульсного управления Р2 корр. двумя цистернами. Изобретение позволяет осуществлять автоматический переход корабля без хода по глубине с высокой скоростью изменения глубины в процессе перехода. 1 ил.
Способ управления движением корабля по глубине, использующий датчики ускорения и скорости изменения глубины, датчик и задатчик глубины и блок задания, в который вводят сигналы текущей и заданной глубин с датчика и задатчика глубины для формирования сигнала перехода по глубине, отличающийся тем, что применяют две цистерны и блок временных программ, в который вводят сигнал перехода по глубине для формирования сигнала временной программы первого этапа импульсного управления P1, который вводят на управление двумя цистернами, сигналы ускорения и скорости изменения глубины от датчиков ускорения и скорости изменения глубины вводят в блок временных программ, при совпадении измеренных трех сигналов: текущей глубины, скорости изменения глубины и ускорения глубины с тремя программными значениями сигналов глубины сдерживания, скорости и ускорения сдерживания сигнал временной программы второго этапа импульсного управления Р2 прог. вводят на управление двумя цистернами, при неравенстве измеренных сигналов скорости или ускорения изменения глубины программным значениям скорости или ускорения сдерживания глубины включают второй этап управления с сигналом корректированной временной программы второго этапа импульсного управления Р2 корр., который вводят на управление двумя цистернами.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
| US 4763596 A, 16.08.1988. | |||

