Изобретение относится к области электротехники, а именно к управлению входными преобразователями электроподвижного состава переменного тока.
Известен способ управления четырехквадрантным преобразователем (4qs), заключающийся в том, что ток, протекающий через дроссель, регулируют изменением длительности времени приложения к нему напряжения источника переменного напряжения или же разности напряжений источника переменного напряжения и емкости выходного фильтра, длительности приложения напряжения источника напряжения переменного тока и разности напряжений источника переменного напряжения и емкости выходного фильтра, которые определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала (см. книгу A.M.Солодунов, Ю.М.Иньков, Г.Н.Коваливкер, В.В.Литовченко. Преобразовательные устройства электропоездов с асинхронными тяговыми двигателями. Рига: Зинатне, 1991 г., с.104-108).
При таком способе требуется постоянный контроль сдвига тактового сигнала относительно модулирующего синусоидального сигнала, что требует значительных ресурсов системы управления преобразователем.
Наиболее близким, по технической сущности, является способ управления четырехквадрантным преобразователем, состоящий в том, что ток, протекающий через дроссель, регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости выходного фильтра, которые определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно питающего напряжения на угол
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения (патент РФ №2289193).
Этот способ позволяет достичь высоких энергетических показателей при широтно-импульсной модуляции (ШИМ) с большим числом импульсов, т.е. с частотой порядка 550 Гц и выше. При этом увеличение частоты модуляции сопровождается ростом коммутационных потерь в силовых полупроводниковых приборах. Особенно неблагоприятное соотношение преобразованной мощности и мощности потерь на коммутацию силовых полупроводниковых приборов наблюдается при низких нагрузках преобразователя, что также является недостатком данного способа управления.
Еще одним недостатком способа является требование сохранять в памяти системы управления значение коэффициента модуляции и сдвига фаз модулирующего и тактового сигналов, зафиксированное в предыдущем периоде для обеспечения точности и быстродействия регулирования. Все это требует значительных ресурсов системы управления, может привести к погрешности накопления при запоминании фазы модулирующего сигнала.
Задачей изобретения является повышение быстродействия и надежности процесса регулирования четырехквадрантного преобразователя за счет формирования модулирующей функции, адекватной характеру нагрузки. Второстепенной задачей изобретения является снижение требований к ресурсам системы управления преобразователем - повышение требований и надежности регулирования при реализации способа управления.
Поставленную задачу решают тем, что в известном способе управления четырехквадрантным преобразователем, при котором ток, протекающий через дроссель, регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости входного фильтра, которые определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения,
введены новые признаки: разбивают полупериод сетевого напряжения на m равных i-x участков, равных по длительности такту широтно-импульсной модуляции напряжения, где i=1…m, измеряют действующее значение тока сети для каждого из участков, на каждом полупериоде определяют рассогласование действующих значений токов Ii и Im-i+1 на интервалах регулирования, по формуле ΔIi=Ii-Im-i+1, полученную величину рассогласования умножают на интегральный коэффициент, полученный с выхода пропорционально-интегрального регулятора напряжения. На участках, порядковый номер которых меньше m/2, вычитают полученную величину рассогласования из заданного значения тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра. На участках, порядковый номер которых больше m/2, складывают полученную величину рассогласования с заданным значением тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра преобразователя. На следующем одноименном по знаку полупериоде формируют сигналы модулирующей функции Fm путем сложения значений тока, полученных на каждом участке отдельно.
Положительным эффектом изобретения является отсутствие необходимости обеспечения фазового сдвига модулирующей синусоиды. В способе достаточно определить значение единичной синусоиды для каждого ШИМ-интервала один раз перед началом регулирования. Это повышает быстродействие и надежность регулирования.
Новым в изобретении является то, что на модулирующий синусоидальный сигнал в первом полупериоде при пуске накладывают изменения, позволяющие получать без фазового сдвига модулирующего и тактового сигнала необходимую фазу сетевого тока и сетевого напряжения путем формирования соответствующей формы модулирующего сигнала для каждого интервала регулирования.
На фиг.1 представлено устройство, реализующее предлагаемый способ управления;
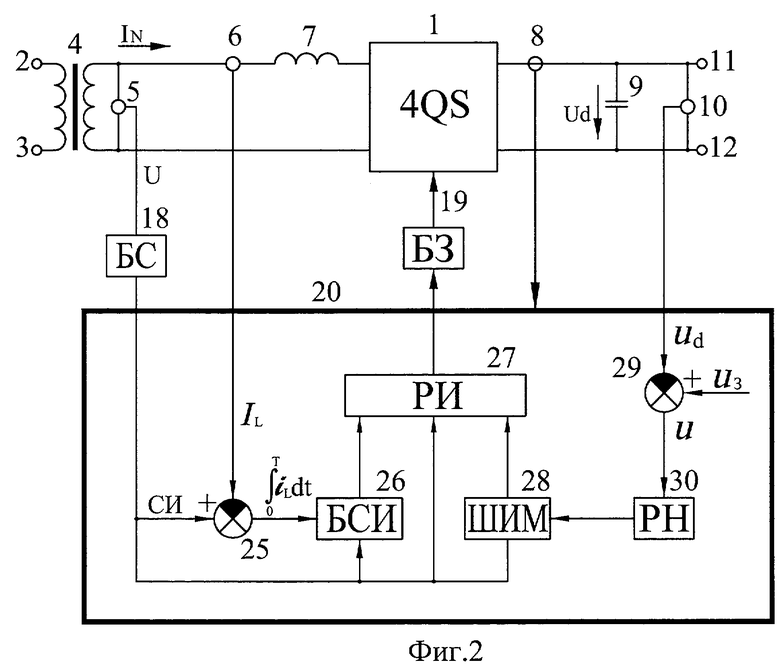
На фиг.2 - структурная схема системы автоматического регулирования четырехквадрантного преобразователя с управлением по предложенному способу;
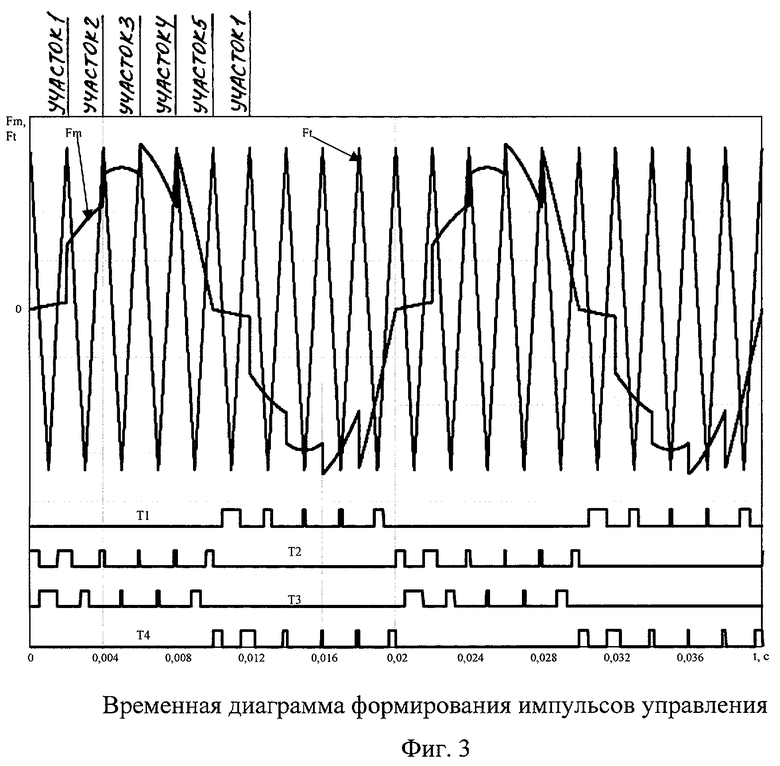
На фиг.3 - временная диаграмма формирования импульсов управления четырехквадрантного преобразователя;
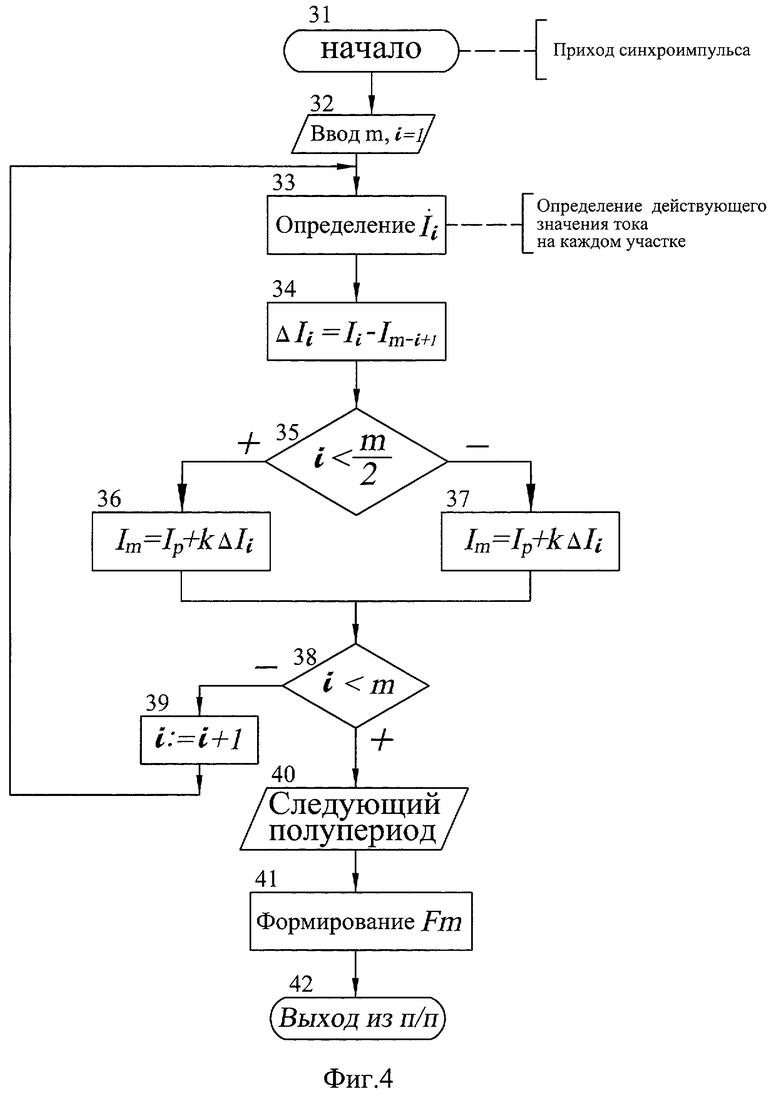
На фиг.4 - алгоритм реализации предлагаемого способа управления.
Устройство, реализующее способ управления с формированием модулирующего сигнала, представляет собой четырехквадрантный преобразователь 1 (фиг.1), который получает питание от зажимов источника переменного тока 2 и 3 через понижающий трансформатор 4, на выходе которого к вторичной обмотке подключен датчик напряжения 5. Между вторичной обмоткой трансформатора 4 и преобразователем 1 подключен датчик тока 6 и последовательно с ним дроссель 7. К выходу преобразователя 1, к проводу с положительным потенциалом выпрямленного напряжения (катодная цепь диодов) подключен датчик выходного тока 8, параллельно выходу преобразователя 1 подключен сглаживающий емкостной фильтр 9 и датчик выходного напряжения 10. Нагрузка преобразователя 1 подключена к клеммам 11 и 12. Установленные в цепях питания преобразователя датчики напряжения 5 и 10 и тока 6 и 8 подключены своими выходами (измерительными каналами) к выпрямителям сигналов измерений (ВСИ) соответственно 13-16. Датчики 5, 6, 8 и 10 служат для контроля регулируемых параметров преобразователя 1. Выходы ВСИ 13-16 подключены к шине данных-адресов (интерфейсу) 17. Выход датчика 5 также подключен к блоку синхронизации 18. Блок синхронизации 18 подключен к блоку задания сигналов управления БЗ 19. Интерфейс 17 имеет связь с блоком задания 19 и микропроцессорным контроллером (МПК) 20. МПК 20 имеет связь с перепрограммируемым запоминающим устройством ППЗУ 21, оперативным запоминающим устройством ОЗУ 22, внешними устройствами через интерфейсы стандарта RS, например интерфейс RS232 (блок 23) и интерфейс типа CAN (блок 24). В ППЗУ 21 хранится программное обеспечение, константы, необходимые для реализации способа управления. В ОЗУ 22 осуществляется загрузка управляющей программы при включении преобразователя 1. Интерфейсы 22 и 23 необходимы для связи системы управления блок 24 с внешними устройствами, например с компьютером для отладки и считывания информации.
В качестве МПК 20 может быть использован специализированный контроллер, например Ml 67-1C (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037 Москва, Измайловская пл., 7). В качестве датчиков тока и напряжения 5, 6, 8 и 10 могут быть использованы, например, датчики-трансформаторы типа LEM производства ООО «ТВЕЛЕМ» (170023, г.Тверь, ул. Маршала Буденного, 11, тел. 8-4822-444053, http://www.tvelem.ru).
Процесс управления четырехквадрантным преобразователем с формированием модулирующего сигнала иллюстрируется структурной схемой системы автоматического регулирования на фиг.2. На ней представлена связь сигналов управления и контроля, поступаемых с датчиков 5, 6, 8 и 10 в блоки микропроцессорного контроллера 20, и сигналов, поступающих с блоков микропроцессорного контроллера 20 на вентили преобразователя 1. Блоки 25-30 реализованы программно в блоке микропроцессорного контроллера 20.
Сигналы о границах полупериода питающего напряжения поступают с датчика напряжения 5 в блок синхронизации БС 18. БС 18 обеспечивает выработку однополярных дискретных сигналов о границах полупериодов питающего напряжения. С выхода БС 18 сигналы поступают через узел интегрирования 25 в блок сравнения интегралов БСИ 26, в котором производится разбиение тока на m ШИМ-интервалов, в зависимости от полупериода сети определяют разностную составляющую i-го и (m-i)-го интегралов тока и определяют коэффициент регуляции корректора мощности для каждого ШИМ-интервала. Сигналы БС 18 поступают также на распределитель импульсов (РИ) управления преобразователя 27 и на блок формирования широтно-импульсной модуляции ШИМ 28. С выхода датчика напряжения 10 сигнал о величине напряжения через узел сравнения 29 поступает в регулятор напряжения 30, выход которого соединен с блоком ШИМ 28. Выходной сигнал блока ШИМ 28 поступает на РИ 27.
На вход регулятора тока (блок 25) поступают сигналы датчика входного тока 6 преобразователя 1 и сигнал синхронизации СИ полупериода питающей сети.
По сигналу датчика тока 5 определяют действующее значение тока за полупериод сетевого напряжения. При превышении действующим значением тока, например, значения 100 А подают разрешение на запуск (включение) регулятора коэффициента мощности, реализованного в блоке БСИ 26. Если после включения регулятора (в блоке 26) ток падает ниже определенной уставки, например 50А, выключают его из работы.
Поскольку ток в цепи вторичной обмотки трансформатора 4 переменный, то непосредственно на вход узла интегрирования 25 подают его абсолютное значение (модуль). В состав регулятора (блок 26) входит четыре генератора импульсов (не показаны), предназначенных для разбиения полупериода сетевого напряжения, на пять равных участков (в данном случае) длительностью по 0,002 с. Далее определяют действующее значение тока для каждого из участков.
После определения действующих значений токов происходит их сравнение на первом и пятом участках (фиг.3). Величину рассогласования значений подают на вход интегральной части регулятора блока 27 (на блоке не показано) и умножают на интегральный коэффициент.
С пропорционально-интегрального регулятора напряжения 30 поступает сигнал заданного значения тока на конденсаторе фильтра 10. На первом участке (фиг.3) из заданного значения тока вычитают величину рассогласования, а на пятом участке, наоборот, складывают эти две величины.
На втором и четвертом участках проводят такие же операции, что и на первом и пятом.
На третьем участке заданное значение токов остается неизменным.
На следующем этапе происходит формирование модулирующей функции Fm путем сложения значений, полученных на каждом отдельном участке.
При запуске преобразователя 1 (первый период) начальную модулирующую функцию можно определить по формуле:
- без коррекции коэффициента мощности:
Fm=Kmsinωt.
- а при включении корректора мощности функция принимает вид:
Fmi=(Km-Ko(im-i-ii))sinωt, для i<m/2
Fmi=(Km+Ko(im-i-ii))sinωt, для i>m/2
KO=const - коэффициент регуляции корректора мощности. К0>1.
Кm=(А-(Кр+КU))
где
А - амплитудное значение модулирующей функции, при котором нет импульсов. Определяется частотой ШИМ и длительностью одного такта ШИМ.
Kp=KS(UЗ-Ud),
где KS - коэффициент пропорциональной части регулятора напряжения;
- тактовый сигнал KU=КU+К1(UЗ-Ud)
Функция модулирующего сигнала при включении преобразователя
Процесс регулирования тока по ШИМ интервалам в предлагаемом способе описывают уравнением:
где 2n+1 - количество ШИМ-интервалов на Т/2. Количество взаимозаменяемых регуляторов должно быть  которые «разводят» в разные стороны (от центра полупериода питающего напряжения) модулирующие синусоиды с одним и тем же коэффициентом. При постоянстве мощности на участке Т/2 это влияет только на его коэффициент регулирования (К), т.е. влияет на форму и фазовый сдвиг тока относительно полупериода. Коэффициент при модулирующей синусоиде центрального на полупериоде ШИМ-интервала изменяют по обратной связи от напряжения на нагрузке, т.е. поддерживают Ud=const.
которые «разводят» в разные стороны (от центра полупериода питающего напряжения) модулирующие синусоиды с одним и тем же коэффициентом. При постоянстве мощности на участке Т/2 это влияет только на его коэффициент регулирования (К), т.е. влияет на форму и фазовый сдвиг тока относительно полупериода. Коэффициент при модулирующей синусоиде центрального на полупериоде ШИМ-интервала изменяют по обратной связи от напряжения на нагрузке, т.е. поддерживают Ud=const.
Способ реализуют алгоритмом, приведенным на фиг.4.
Запуск управляющей программы производят по приходу синхронизирующего импульса СИ (блок 31). В блоке 32 в оперативную память системы управления (блок 21) вводят количество участков m регулирования напряжения за полупериод питающего напряжения. Также в память вводят сдвиг модулирующего синусоидального сигнала и тактового треугольного сигнала относительно питающего напряжения на угол
где X - индуктивное сопротивление контура протекания тока через дроссель при приложении к нему напряжения источника переменного напряжения; I - действующее значение тока дросселя; U - действующее значение напряжения источника переменного напряжения. В блоке 33 определяют действующее значение тока сети на каждом из m участков. В блоке 34 определяют разность между током каждого участка i-м и m - i+1 в полупериоде, т.е. симметричными относительно центра полупериода.
В блоке 35 выполняют сравнительную принадлежность i-го участка к значению m/2. Если номер участка меньше, чем целое число m/2, то в блоке 36 значение тока на этом i-м интервале определяют вычитанием полученной величины рассогласования из заданного значения тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра.
Если номер участка больше или равен целому числу m/2, то в блоке 35 значение тока на этом i-м интервале определяют сложением полученной величины рассогласования с заданным значением тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра.
В блоке 38 определяют, является ли i-й интервал последним за полупериод (тогда переходят в блоке 39 к регулированию следующего участка и возвращаются затем в блок 33) или нет - тогда наступает следующий полупериод, переходят в блок 40.
В блоке 41 формируют модулирующую функцию Fm путем сложения значений тока, полученных на каждом участке отдельно. В блоке 42 осуществляют выход из подпрограммы для загрузки команд на коммутацию вентилей Т1-Т4 преобразователя 1 в соответствии с фиг.3, с последующим в ожиданием команд нового цикла регулирования. Полученная модулирующая функция Fm отличается от стартовой синусоидальной модулирующей функции, задаваемой в начале регулирования преобразователя амплитудами по отдельным участкам широтно-импульсно модулированных интервалов, но совпадает с ней по фазе. Предлагаемый способ основан на амплитудной модуляции напряжения четырехквадрантного преобразователя.
Достоинством предлагаемого способа является отсутствие необходимости фазового сдвига модулирующей синусоиды, т.е. достаточно определить значение единичной синусоиды для каждого ШИМ-интервала один раз перед началом регулирования (во время запуска преобразователя). Это повышает быстродействие и надежность регулирования.
Из фиг.3 видно, как изменяется модулирующий сигнал по сравнению с изначальным синусоидальным, с целью обеспечения необходимого сдвига между сетевым током и напряжением.
Таким образом происходит формирование модулирующей функции, адаптированной под условия регулирования заданных электрических параметров преобразователя.
В предлагаемом способе нет необходимости выполнять автоподстройку коэффициента модуляции с ростом нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2006 |
|
RU2315416C2 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| Четырехквадрантный преобразователь | 2015 |
|
RU2622889C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
Изобретение относится к области электротехники и может быть использовано в выпрямительных установках с принудительной коммутацией при управлении входными преобразователями на электроподвижном составе переменного тока. Техническим результатом является повышение быстродействия и надежности регулирования. В способе управления четырехквадрантным преобразователем с формированием модулирующего сигнала ток, протекающий через дроссель, регулируют изменением продолжительности времени приложения к нему напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости входного фильтра, которые определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол
где Х - индуктивное сопротивление контура протекания тока дросселя при приложении к нему напряжения источника переменного напряжения; I - действующее значение тока дросселя; U - действующее значение напряжения источника переменного напряжения. Полупериод сетевого напряжения разбивают на m равных i-x участков, равных по длительности такту широтно-импульсной модуляции напряжения, где i=1…m. Измеряют действующее значение тока сети для каждого из участков. На каждом полупериоде определяют рассогласование действующих значений токов Ii и Im-i+1, no формуле ΔIi=Ii-Im-i+1. Полученную величину рассогласования умножают на интегральный коэффициент, полученный с выхода пропорционально-интегрального регулятора напряжения. На участках, порядковый номер которых меньше m/2, вычитают полученную величину рассогласования из заданного значения тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра. На участках, порядковый номер которых больше m/2, складывают полученную величину рассогласования с заданным значением тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра. На следующем одноименном по знаку полупериоде формируют модулирующую функцию Fm путем сложения значений тока, полученных на каждом участке отдельно. 4 ил.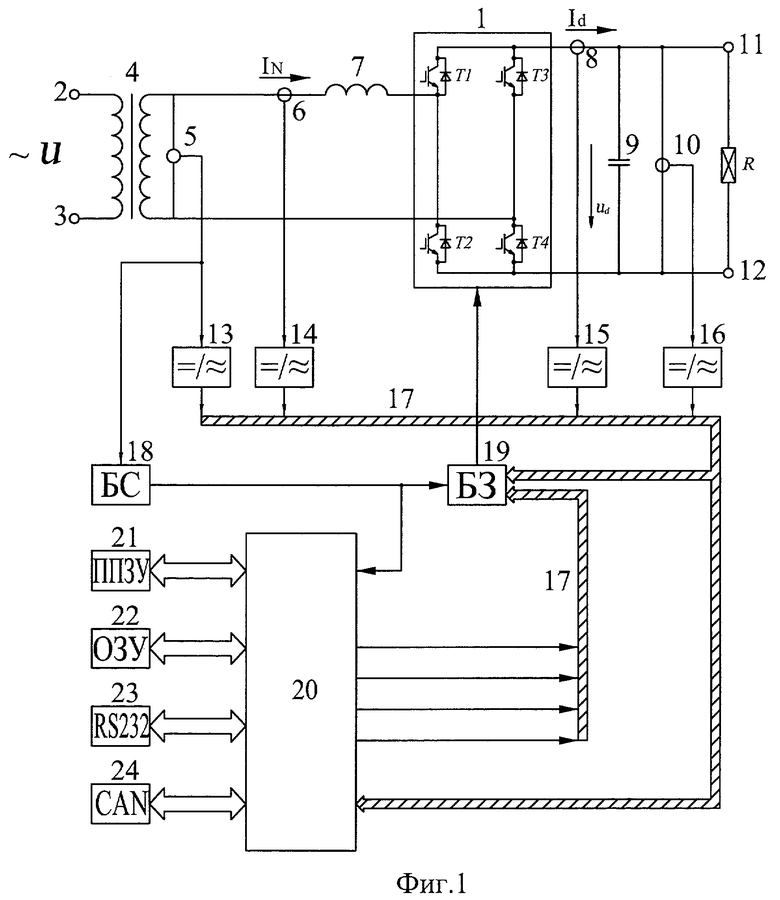
Способ управления четырехквадрантным преобразователем с формированием модулирующего сигнала, заключающийся в том, что ток, протекающий через дроссель, регулируют изменением продолжительности времени приложения к преобразователю напряжения источника переменного напряжения и разности напряжений источника переменного напряжения и емкости входного фильтра, которые определяют соотношением модулирующего синусоидального сигнала и тактового треугольного сигнала, сдвинутых относительно напряжения источника переменного напряжения на угол
 ,
,
где Х - индуктивное сопротивление контура протекания тока через дроссель при приложении к нему напряжения источника переменного напряжения;
I - действующее значение тока дросселя;
U - действующее значение напряжения источника переменного напряжения, отличающийся тем, что разбивают полупериод сетевого напряжения на m равных i-x участков, равных по длительности такту широтно-импульсной модуляции напряжения, где i=1…m, измеряют действующее значение тока сети для каждого из участков, на каждом полупериоде определяют рассогласование действующих значений токов Ii и Im-i+1 по формуле ΔIi=Ii-Im-i+1, полученную величину рассогласования умножают на интегральный коэффициент, полученный с выхода пропорционально-интегрального регулятора напряжения, на участках, порядковый номер которых меньше m/2, вычитают полученную величину рассогласования из заданного значения тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра, на участках, порядковый номер которых больше m/2, складывают полученную величину рассогласования с заданным значением тока, поступающего с пропорционально-интегрального регулятора напряжения на конденсаторе фильтра, на следующем одноименном по знаку полупериоде формируют модулирующую функцию Fm путем сложения значений тока, полученных на каждом участке отдельно.
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289193C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| US 6025999 A, 15.02.2000 | |||
| DE 4129261 C1, 08.10.1992 | |||
| JP 10174444 A, 26.06.1998 | |||
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ СТАБИЛИЗАТОРОВ ОТ ПЕРЕГРУЗОК | 0 |
|
SU408296A1 |
| Способ микроподачи | 1990 |
|
SU1771936A2 |
| WO 03063330 A1, 31.07.2003. | |||

