Изобретение относится к устройствам, применяемым в технике для трансформации плоских конструкций в пространственные. Разработка новых складных механизмов и устройств является достаточно актуальной задачей и имеет широкий спектр практической реализации.
Известен плоский ромбовидный механизм складных ступеней [J.-S. Zhao, J.-Y. Wang, F. Chu, Z.-J. Feng, J.S. Dai. Mechanism synthesis of a foldable stair. Journal of Mechanisms and Robotics, vol. 4, paper No: 014502, 2012], включающий в свой состав ведущее звено и последовательно соединенные двухзвенные группы нулевой подвижности (диады ВВВ). В этом механизме все звенья входят между собой во вращательные кинематические пары. Недостатком такого механизма является невозможность формирования однослойной плоской конструкции в сложенном состоянии в виду того, что звенья механизма накладываются друг на друга.
Наиболее близким к предлагаемому устройству является интегрированный оригами механизм [G. Wei, J.S. Dai. Origami-inspired integrated planar-spherical overconstrained mechanisms. Journal of Mechanical Design, vol. 136, issue 5, paper No: MD-13-1059, 2014], относящийся к типу складных механизмов. Данный механизм принимается за прототип предлагаемого устройства. Механизм состоит из шарнирного четырехзвенника, на звеньях которого диагонально расположены двухзвенные интегрированные сферические кинематические цепи (диады ВВВ), геометрические оси вращательных пар которых пересекаются в одной точке. Всего механизм включает восемь звеньев: семь подвижных и одно неподвижное, соединенные десятью вращательными кинематическими парами. Общая подвижность механизма равна одному (W=1). Она складывается из подвижности четырехзвенника, равной одному, и подвижностей присоединенных к нему двухзвенных кинематических цепей, равных нулю.
Недостаток прототипа заключается в высоком требовании к точности изготовления сферических кинематических цепей, в каждой из которых оси всех трех шарниров обязательно должны пересекаться в одной точке. Несоблюдение этого условия приведет к заклиниванию звеньев всего механизма и не позволит обеспечить его работоспособность.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании такого механизма, в котором установленные на шарнирном четырехзвеннике двухзвенные кинематические цепи были бы выполнены отличными от сферических, при этом обеспечивая двухзвенным цепям выход из плоскости четырехзвенника.
Сущность заявляемого устройства заключается в том, что предлагается складной механизм, включающий стойку, ведущее звено, шатун и коромысло, образующие шарнирный четырехзвенник, на каждой паре соседних звеньев которого установлена кинематическая цепь из двух дополнительных звеньев и трех шарниров, при этом звенья в каждой дополнительной кинематической цепи соединены между собой посредством торового шарнира, а со звеньями шарнирного четырехзвенника посредством цилиндрических шарниров.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении самоустанавливаемости звеньев обеих интегрированных цепей, не требующих повышенной точности в ориентации кинематических пар в них. Технический результат достигается тем, что в каждой из двухзвенных интегрированных кинематических цепей, установленных на четырехзвеннике, вместо трех вращательных шарниров вводятся два цилиндрических для соединения с четырехзвенником и один торовый для соединения звеньев цепи между собой.
Предлагаемое изобретение поясняется чертежом, где
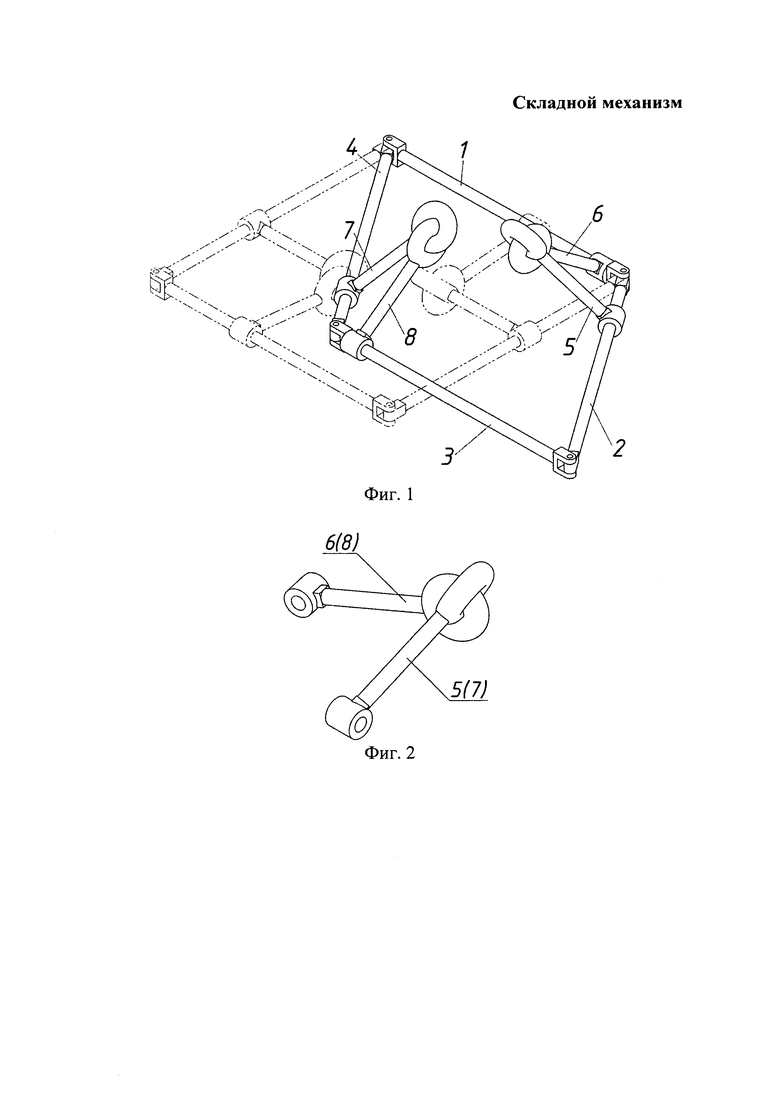
на фиг. 1 изображен складной механизм в разложенном положении (основными линиями) и в сложенном (плоском) положении (штрих-пунктирными линиями);
на фиг. 2 изображена двухзвенная кинематическая цепь.
Механизм состоит из стойки 1, ведущего звена 2, шатуна 3, коромысла 4 и двух кинематических цепей (фиг. 1), включающих по паре дополнительных звеньев 5, 6 и 7, 8 (фиг. 2) и установленных диагонально на звеньях 1, 2 и 3, 4.
Стойка 1, ведущее звено 2, шатун 3 и коромысло 4 соединены между собой вращательными кинематическими парами с параллельными осями. Стойка 1 и звено 6, ведущее звено 2 и звено 5, шатун 3 и звено 8, коромысло 4 и звено 7 образуют между собой цилиндрические кинематические пары, оси которых совпадают с продольными осями соответствующих звеньев шарнирного четырехзвенника и перпендикулярны осям его кинематических пар звеньев 1-2, 2-3, 3-4 и 4-1. Дополнительные звенья 5 и 6, как 7 и 8 входят между собой в торовые кинематические пары, допускающими относительные вращения вокруг перпендикулярных осей (фиг. 1 и 2).
Подвижность механизма складывается из подвижности четырехзвенника, которая равная одному (W=1), и подвижностей пары интегрированных кинематических цепей, установленных на четырехзвеннике. Их подвижность может быть найдена по формуле Малышева А.П. [Артоболевский И.И. Теория механизмов. Изд-во «Наука», 1965], имеющей вид
W=6n-5p5-4р4-3р3-2р2-р1,
где W - подвижность механической системы, n - число подвижных звеньев механической системы, р5, p4, р3, р2 и р1 - числа одно-, двух-, трех-, четырех- и пятиподвижных кинематических пар. Кинематическая цепь звеньев 5, 6, как и 7, 8 (фиг. 2), включает два звена (n=2) и три двухподвижных пары (р4=3). Тогда подвижность указанных цепей в соответствии с формулой Малышева А.П. равна нулю (W=0). Таким образом, кинематические цепи звеньев 5, 6, и 7, 8 не добавляют дополнительных подвижностей шарнирному четырехзвеннику и подвижность всего механизма оказывается равной одному (W=1). Для получения определенного движения всех звеньев механизма достаточно задать движение единственному звену. В данном случае движение задается ведущему звену 2.
Принцип работы механизма заключается в следующем. При повороте ведущего звена 2 по часовой стрелке, движение передается на шатун 3 и коромысло 4, которые приводят в движение кинематические цепи звеньев 5, 6 и 7, 8, выходящие из плоскости расположения звеньев 1-4. При этом цилиндрические шарниры 5-2 и 6-1 смещаются к вращательному шарниру 1-2, а цилиндрические шарниры 8-3 и 7-4 смещаются к вращательному шарниру 3-4. Это позволяет торовым парам 5-6 и 7-8 смещаться вверх, обеспечивая трансформирование плоской конструкции в пространственную. Высота подъема пар звеньев 5-6 и 7-8 оказывается полностью контролируемой поворотом ведущего звена 2.
Разработанный механизм может быть использован в качестве каркаса для тента, который при транспортировке в сложенном состоянии не требует большого пространства. Механизм также может быть использован при создании коробов, способных складываться в плоские конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРИГАМИ МЕХАНИЗМ | 2018 |
|
RU2694704C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| СКЛАДНОЙ МЕХАНИЗМ С ИНТЕГРИРОВАННЫМИ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ | 2019 |
|
RU2729835C1 |
| СКЛАДНАЯ ИНЖЕНЕРНАЯ КОНСТРУКЦИЯ | 2023 |
|
RU2807787C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к области машиностроения, а более конкретно к складным механизмам. Складной механизм содержит стойку, ведущее звено, шатун и коромысло, образующие шарнирный четырехзвенник, на каждой паре соседних звеньев которого установлена кинематическая цепь из двух дополнительных звеньев и трех шарниров. Звенья в каждой дополнительной кинематической цепи соединены между собой посредством торового шарнира, а со звеньями шарнирного четырехзвенника посредством цилиндрических шарниров. Достигается выход дополнительных звеньев из плоскости четырехзвенника. 2 ил.
Складной механизм, включающий стойку, ведущее звено, шатун и коромысло, образующие шарнирный четырехзвенник, на каждой паре соседних звеньев которого установлена кинематическая цепь из двух дополнительных звеньев и трех шарниров, отличающийся тем, что звенья в каждой дополнительной кинематической цепи соединены между собой посредством торового шарнира, а со звеньями шарнирного четырехзвенника посредством цилиндрических шарниров.
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| "Механизмы | |||
| Справочник" | |||
| Изд | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| и доп | |||
| Под ред | |||
| С.Н | |||
| Кожевникова | |||
| М., "Машиностроение", 1976, стр | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 2016318194 A1, 03.11.2016 | |||
| US 2017219007 A1, 03.08.2017 | |||
| ИНДИВИДУАЛЬНОЕ ПРОТИВОШУМНОЕ УСТРОЙСТВО | 0 |
|
SU169747A1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |

