Область техники, к которой относится изобретение
Настоящее изобретение относится к подвижному роботу и, в частности, к системе определения положения для подвижного робота, а также системе возврата к зарядной стойке и способу использования данной системы, причем система определения положения способна точно определять положение источника беспроводного сигнала, используя беспроводной сигнал, а система возврата к зарядной стойке позволяет подвижному роботу безошибочно и быстро возвращаться к зарядной стойке, используя определенное положение.
Уровень техники
Робот, разработанный в качестве промышленного, используется как часть заводского автоматического оборудования. Кроме того, данный робот используется для сбора или получения требуемой информации в качестве замены человеку в экстремальных ситуациях, не приемлемых для человека. С началом использования роботов в высокотехнологичной космической промышленности робототехника стала развиваться более быстрыми темпами. В последнее время в этой области разработан домашний робот для облегчения домашнего труда, типичным примером которого является робот-уборщик.
Робот-уборщик, являющийся одним из видов подвижного робота, представляет собой устройство, способное свободно перемещаться в пределах заданной зоны уборки, например, жилого дома или офиса и собирать пыль или грязь. Кроме прочих, такой робот содержит элементы обычного пылесоса. В данном случае упомянутые прочие элементы включают устройство, обеспечивающее перемещение робота-уборщика, множество датчиков, предназначенных для обнаружения препятствий на пути робота-уборщика с целью предотвращения столкновения этого робота с различными препятствиями, микропроцессор для управления упомянутыми элементами робота-уборщика и т.п. Во время свободного перемещения по зоне уборки робот-уборщик получает энергию, необходимую для функционирования, от аккумуляторной батареи.
С другой стороны, для удобства пользования в роботе-уборщике предусмотрено наличие функции автоматической зарядки. При выполнении данной функции робот-уборщик проверяет уровень энергии, оставшейся в аккумуляторной батарее. Если этот уровень ниже эталонного значения, то робот-уборщик автоматически возвращается к зарядной стойке, расположенной в зоне уборки в заранее определенном месте, повторно заряжает аккумуляторную батарею и возобновляет выполнение соответствующей операции.
Однако при выполнении обычного способа автоматического возврата робота-уборщика к зарядной стойке используются этапы установки на зарядной стойке специального ориентира, определения положения зарядной стойки, когда робот-уборщик обнаруживает ориентир, установленный на этой стойке, в процессе произвольного перемещения и обеспечения последующего возврата робота-уборщика к упомянутой зарядной стойке.
Кроме того, обычный способ автоматического возврата к зарядной стойке обладает тем недостатком, что зарядная стойка должна быть размещена в той же области, в которой находится робот-уборщик, и между этим роботом и зарядной стойкой не должно быть никаких препятствий, чтобы позволить роботу-уборщику обнаружить специальный ориентир, установленный на упомянутой зарядной стойке.
Например, если зарядная стойка находится в одной из жилых комнат, а робот-уборщик находится в другой, то может оказаться невозможным обеспечить нормальный возврат робота-уборщика к зарядной стойке, так как этот робот не может обнаружить специальный ориентир, установленный на зарядной стойке из-за наличия препятствия, например стены.
Раскрытие изобретения
Таким образом, настоящее изобретение создано с учетом упомянутых выше недостатков и его задачей является предоставление системы определения положения для подвижного робота, которая способна определять направление на источник беспроводного сигнала путем обнаружения беспроводного сигнала, излучаемого упомянутым источником, при помощи множества направленных антенн и вычислять расстояние между источником беспроводного сигнала и подвижным роботом, используя разницу во времени обнаружения беспроводного сигнала упомянутыми направленными антеннами, которые обнаруживают этот беспроводной сигнал.
Другой задачей настоящего изобретения является предоставление системы возврата к зарядной стойке и способ использования данной системы, которые способны обеспечить более эффективный возврат подвижного робота к зарядной стойке с использованием параметров направления и параметров расстояния, вычисленных на основе беспроводного сигнала, излучаемого источником беспроводного сигнала при его установке на упомянутой зарядной стойке, для случая, когда подвижный робот возвращается к зарядной стойке в автоматическом режиме.
Согласно одному из аспектов настоящего изобретения упомянутые выше и другие задачи могут быть выполнены при использовании системы определения положения для подвижного робота, которая содержит источник беспроводного сигнала, предназначенный для излучения беспроводного сигнала в непрерывном или периодическом режиме; и подвижный робот, содержащий множество направленных антенн, предназначенных для обнаружения упомянутого беспроводного сигнала, излучаемого источником беспроводного сигнала, причем упомянутый подвижный робот определяет направление на источник беспроводного сигнала с использованием угла поворота, определенного при помощи упомянутых направленных антенн, и вычисляет расстояние, отделяющее его от упомянутого источника беспроводного сигнала с использованием разницы во времени обнаружения беспроводного сигнала упомянутыми направленными антеннами.
Согласно другому аспекту настоящего изобретения предлагается система возврата подвижного робота к зарядной стойке, и эта система содержит: зарядную стойку, предназначенную для излучения беспроводного сигнала в непрерывном или периодическом режиме, и подвижный робот, содержащий, по меньшей мере, две направленные антенны, предназначенные для обнаружения упомянутого беспроводного сигнала, излучаемого зарядной стойкой, причем, если уровень энергии, оставшейся в аккумуляторной батарее подвижного робота, ниже заранее определенного значения, упомянутый подвижный робот вычисляет параметры расстояния, характеризующие положение этого робота, находящегося на удалении от зарядной стойки 20, используя направление на зарядную стойку, определенное при помощи упомянутых направленных антенн, а также используя разницу во времени обнаружения беспроводного сигнала упомянутыми направленными антеннами, и возвращается к зарядной стойке на основе упомянутых параметров расстояния.
Согласно еще одному аспекту настоящего изобретения предлагается способ возврата подвижного робота к зарядной стойке, причем подвижный робот содержит блок вычисления параметров положения и блок расчета возврата к зарядной стойке, и этот способ содержит следующие этапы: обнаруживают беспроводной сигнал, используя направленную антенну, причем упомянутый беспроводной сигнал излучается зарядной стойкой; вычисляют параметры направления на зарядную стойку и параметры расстояния между зарядной стойкой и подвижным роботом и выводят вычисленные параметры направления и параметры расстояния, причем упомянутый блок вычисления параметров положения рассчитывает упомянутые параметры направления и параметры расстояния, используя обнаруженный беспроводной сигнал; и возвращают подвижный робот к зарядной стойке, причем упомянутый блок расчета возврата к зарядной стойке обеспечивает возврат подвижного робота к зарядной стойке на основе упомянутых параметров направления и параметров расстояния, поступивших от упомянутого блока вычисления параметров положения.
Таким образом, настоящим изобретением предлагается система определения положения для подвижного робота, в которой после того, как подвижный робот обнаружил беспроводной сигнал, излучаемый источником беспроводного сигнала, вычислил параметры направления, соответствующие положению источника беспроводного сигнала, и вычислил параметры расстояния, используя разницу во времени обнаружения беспроводного сигнала направленными антеннами, можно точно определить положение источника беспроводного сигнала даже в случае наличия препятствия между подвижным роботом и источником беспроводного сигнала.
Кроме того, настоящим изобретением предлагается система возврата к зарядной стойке и способ использования данной системы, причем, если источником беспроводного сигнала является зарядная стойка, то вычисляя параметры направления и параметры расстояния, даже при наличии препятствия между подвижным роботом и зарядной стойкой, можно точно определить положение зарядной стойки и обеспечить эффективный возврат подвижного робота к зарядной стойке, когда уровень энергии, оставшейся в аккумуляторной батарее, является низким.
Краткое описание чертежей
Упомянутые выше и другие задачи, особенности и преимущества настоящего изобретения станут более понятными из приведенного ниже подробного описания, рассмотренного совместно с сопровождающими чертежами, из которых:
Фиг.1 - схематичное изображение, иллюстрирующее систему определения положения для подвижного робота, соответствующую предпочтительному варианту реализации настоящего изобретения;
Фиг.2 - структурная схема робота-уборщика, являющегося примером подвижного робота, показанного на Фиг.1;
Фиг.3 - графики, иллюстрирующие разницу во времени обнаружения беспроводного сигнала для различных расстояний между роботом-уборщиком и источником беспроводного сигнала, показанными на Фиг.1;
Фиг.4 - схематичное изображение, иллюстрирующее систему возврата к зарядной стойке для подвижного робота, соответствующую предпочтительному варианту реализации настоящего изобретения;
Фиг.5 - структурная схема робота-уборщика, являющегося примером подвижного робота в системе возврата к зарядной стойке, показанной на Фиг.4; и
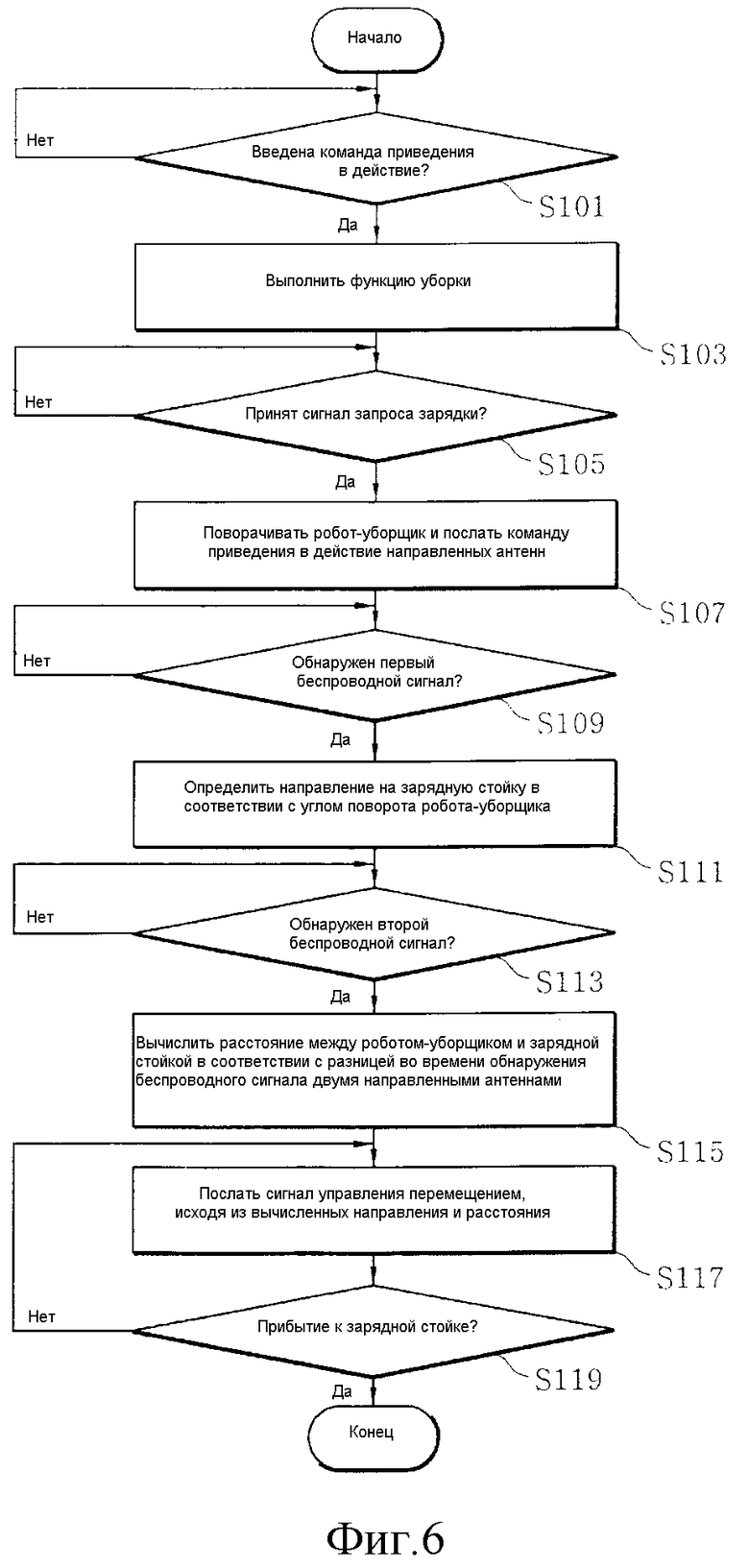
Фиг.6 - блок-схема, иллюстрирующая способ возврата к зарядной стойке для робота-уборщика, соответствующий предпочтительному варианту реализации настоящего изобретения.
Описание предпочтительных вариантов реализации
Далее, со ссылкой на приложенные чертежи будут подробно описаны предпочтительные варианты реализации настоящего изобретения.
Фиг.1 представляет собой схематичное изображение, иллюстрирующее систему определения положения для подвижного робота, соответствующую предпочтительному варианту реализации настоящего изобретения.
Как показано на этой фигуре, система определения положения для подвижного робота, соответствующая предпочтительному варианту реализации настоящего изобретения, содержит источник 10 беспроводного сигнала, размещенный в определенном месте и предназначенный для излучения беспроводного сигнала в непрерывном или периодическом режиме, и подвижный робот 100, который содержит множество направленных антенн 160, предназначенных для обнаружения беспроводного сигнала, излучаемого источником 10 беспроводного сигнала, причем подвижный робот 100 определяет направление на упомянутый источник 10 беспроводного сигнала с использованием угла поворота, определенного при помощи направленной антенны 160, и вычисляет расстояние, отделяющее его от источника 10 беспроводного сигнала, используя разницу во времени обнаружения беспроводного сигнала направленными антеннами 160.
Источник 10 беспроводного сигнала по типу относится к устройствам передачи беспроводного сигнала. Например, он может представлять собой точку доступа, используемую в системах беспроводной связи, и входит в комплект поставки для подвижного робота 100. Предпочтительно, чтобы источник 10 беспроводного сигнала устанавливался по высоте на том же уровне, что и направленная антенна 160, чтобы облегчить обнаружение источника 10 беспроводного сигнала этой антенной, и упомянутый источник 10 беспроводного сигнала может представлять собой, например, зарядную стойку для подвижного робота 100. Источник 10 беспроводного сигнала в непрерывном или периодическом режиме излучает беспроводной сигнал в заранее определенной полосе частот.
Подвижный робот 100 содержит, по меньшей мере, две направленные антенны 160, предназначенные для обнаружения беспроводного сигнала, излучаемого источником 10 беспроводного сигнала. Подвижный робот 100 поворачивается с заранее определенной скоростью в каждом временном интервале и обнаруживает беспроводной сигнал при помощи направленных антенн 160. В дополнение к этому подвижный робот 100 согласно настоящему изобретению определяет направление на источник 10 беспроводного сигнала и вычисляет расстояние до этого источника только путем обнаружения беспроводного сигнала при помощи направленных антенн 160. В то время, как обычная система определяет направление на источник беспроводного сигнала и вычисляет расстояние до него на основе интенсивности беспроводного сигнала, моделируя все варианты затухания и отражения беспроводного сигнала при наличии препятствия, система, соответствующая настоящему изобретению, определяет направление и вычисляет расстояние только путем обнаружения беспроводного сигнала. Поэтому система, соответствующая настоящему изобретению, может работать быстрее, чем упомянутая обычная система.
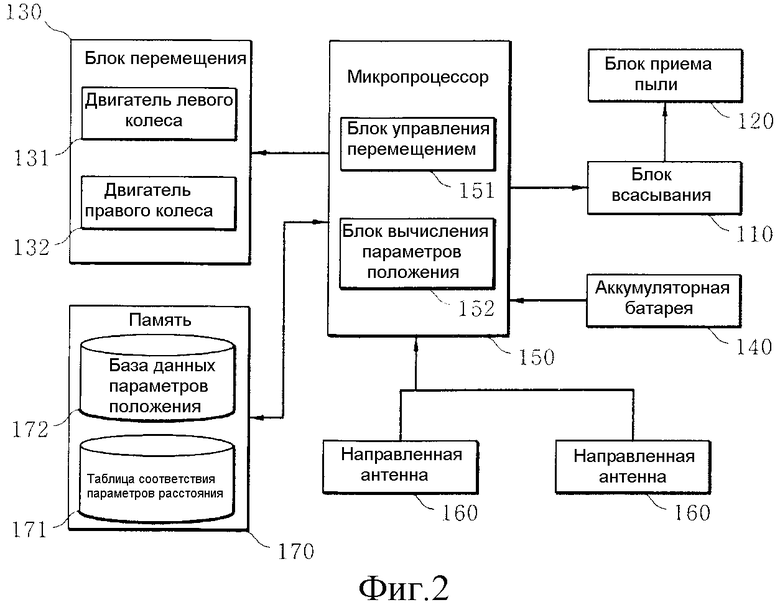
Фиг.2 представляет собой структурную схему робота-уборщика, являющегося примером подвижного робота, показанного на Фиг.1.
Как показано на этой фигуре, робот-уборщик 100, соответствующий предпочтительному варианту реализации настоящего изобретения, содержит основные конструктивные элементы обычного робота-уборщика. Кроме того, робот-уборщик содержит две или более направленные антенны 160, предназначенные для обнаружения беспроводного сигнала, излучаемого источником 10 беспроводного сигнала, показанным на Фиг.1, которые установлены спереди этого робота; память 170, предназначенную для хранения рабочей программы робота-уборщика 100, которая содержит таблицу 171 соответствия параметров расстояния и базу 172 данных, хранящую параметры положения (далее - база 172 параметров положения), причем таблица 171 соответствия параметров расстояния используется для поиска параметров расстояния, соответствующих разнице во времени обнаружения беспроводного сигнала направленными антеннами 160, а база 172 параметров положения хранит параметры расстояния и параметры направления, характеризующие положение робота-уборщика 100, находящегося на удалении от источника 10 беспроводного сигнала; и микропроцессор 150, предназначенный для управления всеми элементами робота-уборщика 100, который содержит блок 151 управления перемещением, предназначенный для управления перемещением робота-уборщика 100 в соответствии с сигналом управления.
Для начала, робот-уборщик обычной конструкции содержит датчик пыли. Кроме того, обычный робот-уборщик содержит блок 110 всасывания, предназначенный для всасывания пыли или грязи, обнаруженных датчиком пыли; блок 120 приема пыли, предназначенный для приема пыли или грязи, собранных блоком 110 всасывания; блок 130 перемещения, предназначенный для перемещения робота-уборщика 100 на основе поступающего сигнала управления, причем блок 130 перемещения содержит двигатель 131 левого колеса и двигатель 132 правого колеса; аккумуляторную батарею 140, предназначенную для подачи напряжения питания в блок 110 всасывания и блок 130 перемещения; и микропроцессор 150, предназначенный для управления упомянутыми элементами. Подробное описание обычной конструкции робота-уборщика будет опущено, так как она считается хорошо известной.
Направленная антенна 160 представляет собой антенну, которая сконструирована таким образом, что имеет диапазон направлений за счет создания луча в пределах конкретного угла. Кроме того, направленная антенна 160 представляет собой антенну, которая сконструирована таким образом, чтобы обеспечить распространение радиоволн только в конкретном направлении за счет установки отражающей платины с задней стороны изотропной антенны.
Например, направленная антенна 160, применяемая в настоящем изобретении, может представлять собой остронаправленную антенну, у которой вертикальная ширина главного лепестка диаграммы направленности очень небольшая, причем упомянутая вертикальная ширина представляет собой ширину диаграммы направленности по уровню половинной мощности в вертикальной плоскости. В частности, предпочтительно, чтобы вертикальная ширина главного лепестка диграммы направленности остронаправленной антенны была меньше 20°. Так как остронаправленная антенна конструктивно представляет собой множество полуволновых симметричных вибраторов, размещенных в одной плоскости, причем к каждому вибратору подводится одинаковая энергия, то остронаправленная антенна может обладать высокой чувствительностью в требуемом направлении и может иметь высокий коэффициент усиления.
Направленная антенна 160 обнаруживает беспроводной сигнал с заранее определенной полосой частот, который в непрерывном или периодическом режиме излучается источником 10 беспроводного сигнала, и передает этот беспроводной сигнал в микропроцессор 150.
Память 170 представляет собой энергонезависимое запоминающее устройство, например ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство), флэш-память и тому подобное, которое позволяет как считывать, так и записывать информацию и в котором хранится рабочая программа для приведения в действие робота-уборщика 100 и необходимые для этого данные. Память 170 согласно одному из аспектов настоящего изобретения содержит таблицу 171 соответствия параметров расстояния и базу 172 параметров положения, причем таблица 171 соответствия параметров расстояния используется для поиска параметров расстояния, соответствующих разнице во времени обнаружения беспроводного сигнала направленными антеннами 160, а база 172 параметров положения хранит параметры расстояния и параметры направления, характеризующие положение робота-уборщика 100, находящегося на удалении от источника 10 беспроводного сигнала. Доступ к данным, хранящимся в памяти 170, осуществляется под управлением микропроцессора 150.
Микропроцессор 150 управляет всеми элементами робота-уборщика 100 и содержит блок 151 управления перемещением, предназначенный для управления работой блока 130 перемещения на основе сигнала управления; и блок 152 вычисления параметров положения, предназначенный для вычисления параметров расстояния и параметров направления, характеризующих положение источника 10 беспроводного сигнала относительно робота-уборщика 100, и сохранения вычисленных параметров расстояния и параметров направления в базе 152 параметров положения, причем упомянутый блок 152 вычисления параметров положения посылает сигнал управления в блок 151 управления перемещением для поворота робота-уборщика 100 с заранее определенной скоростью в каждом временном интервале. В то же время, блок 152 вычисления параметров положения вычисляет параметры направления на основе угла поворота для беспроводного сигнала, который обнаружен направленной антенной 160, вычисляет параметры расстояния для робота-уборщика 100, обращаясь к таблице 171 соответствия параметров расстояния, чтобы получить параметры расстояния, соответствующие разнице во времени обнаружения беспроводных сигналов, поступившей от направленных антенн 160, и сохраняет вычисленные параметры направления и параметры расстояния в базе 172 параметров положения.
Блок 151 управления перемещением управляет работой блока 130 перемещения с целью перемещения робота-уборщика 100 в соответствии с сигналом управления, поступившим от рабочей программы этого робота.
Блок 152 вычисления параметров положения посылает сигнал управления в блок 151 управления перемещением, чтобы задать поворот робота-уборщика 100 с заранее определенной скоростью, и определяет положение робота-уборщика 100 в каждом временном интервале. Одновременно блок 152 вычисления параметров положения выдает команду приведения в действие направленным антеннам 160. В результате робот-уборщик 100 поворачивается под управлением блока 151 управления перемещением, и одновременно с этим направленная антенна 160 обнаруживает беспроводной сигнал и выдает возникающий в результате сигнал обнаружения.
Когда блок 152 вычисления параметров положения принимает сигнал обнаружения от любой из множества направленных антенн 160, этот блок определяет направление на источник 10 беспроводного сигнала, используя угол поворота робота-уборщика 100. При этом вычисленные параметры направления сохраняются в базе 172 параметров положения, находящейся в памяти 170, и используются при задании начального значения поворота при определении положения источника 10 беспроводного сигнала для следующего временного интервала. Таким образом, используя ранее определенное направление в качестве эталонного, можно быстро определить положение источника 10 беспроводного сигнала.
Кроме того, после приема блоком 152 вычисления параметров положения сигнала обнаружения от любой из множества направленных антенн 160 этим блоком измеряется время, проходящее до выдачи сигнала обнаружения следующей направленной антенной. Это необходимо для измерения расстояния между источником 10 беспроводного сигнала и роботом-уборщиком 100. Со ссылкой на Фиг.3 данный процесс будет рассмотрен подробно.
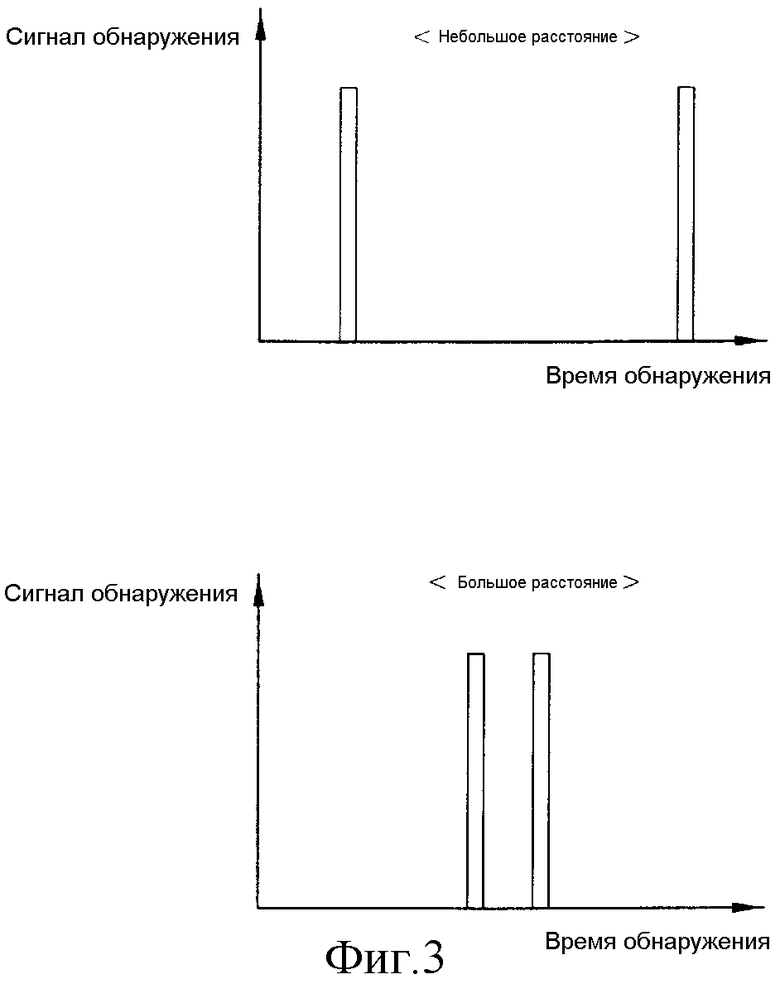
Фиг.3 представляет собой графики, иллюстрирующие разницу во времени обнаружения беспроводного сигнала для различных расстояний между роботом-уборщиком и источником беспроводного сигнала, показанными на Фиг.1.
Как показано на этой фигуре, когда разница во времени обнаружения, представленная двумя сигналами обнаружения, является большой, это означает, что источник 10 беспроводного сигнала находится поблизости от робота-уборщика 100. Это объясняется тем, что область обнаружения расширяется, когда источник 10 беспроводного сигнала удаляется от направленных антенн 160, и область обнаружения сужается, когда источник 10 беспроводного сигнала приближается к направленным антеннам 160. То есть, в случае небольшого расстояния область обнаружения сужается при том, что энергия электромагнитного излучения распространяется по прямой, и в результате разница во времени двух сигналов обнаружения является большой.
Кроме того, когда разница во времени обнаружения, представленная двумя сигналами обнаружения, является небольшой, это означает, что источник 10 беспроводного сигнала удален от робота-уборщика 100. Когда источник 10 беспроводного сигнала удален от робота-уборщика 100, этот источник находится в области обнаружения направленных антенн 160, и в результате разница во времени двух сигналов обнаружения является небольшой.
В дополнение к этому, с использованием таблицы 171 вычисления параметров положения, находящейся в памяти 170, вычисляются параметры расстояния, соответствующие разнице во времени обнаружения беспроводного сигнала направленными антеннами 160. Блок 152 вычисления параметров положения вычисляет разницу во времени обнаружения беспроводного сигнала направленными антеннами 160 и обращается к таблице 171 соответствия параметров расстояния, находящейся в памяти 170, чтобы получить параметры расстояния, соответствующие упомянутой разнице во времени обнаружения. В данном случае таблица 171 соответствия параметров расстояния представляет собой таблицу, в которой хранятся значения, полученные экспериментальным путем в соответствии с настоящим изобретением.
Блок 152 вычисления параметров положения сохраняет параметры направления и параметры расстояния в базе 172 параметров положения, причем направление на источник 10 беспроводного сигнала определяется с использованием угла поворота, первоначально определенного направленными антеннами 160 во время поворота робота-уборщика 100, а расстояние между роботом-уборщиком 100 и источником 10 беспроводного сигнала вычисляется с использованием разницы во времени обнаружения беспроводного сигнала направленными антеннами 160.
После того, как робот-уборщик 100 обнаружил беспроводной сигнал, излучаемый источником 10 беспроводного сигнала, вычислил параметры направления, соответствующие положению источника 10 беспроводного сигнала, и вычислил параметры расстояния, используя разницу во времени обнаружения беспроводного сигнала направленными антеннами 160, можно точно определить положение источника беспроводного сигнала, даже в случае наличия препятствия между роботом-уборщиком 100 и источником 10 беспроводного сигнала.
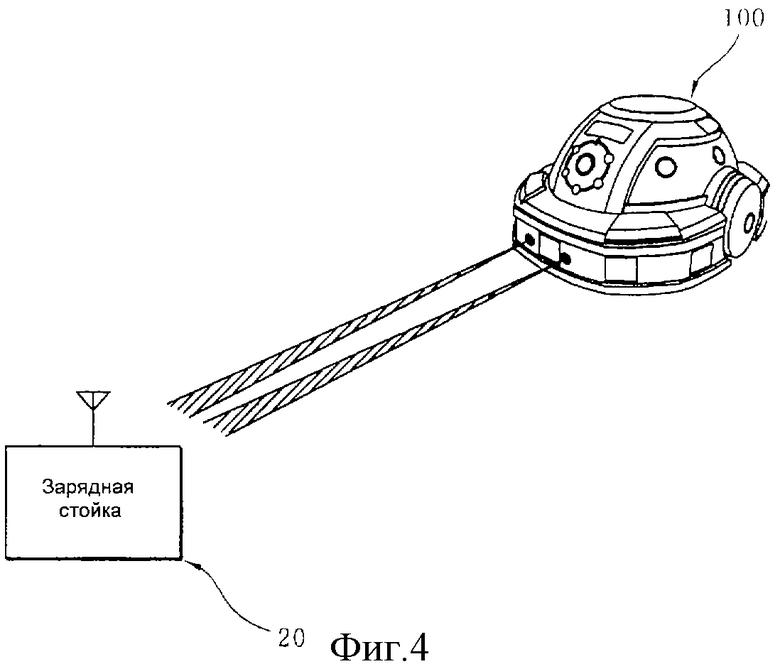
Фиг.4 представляет собой схематичное изображение, иллюстрирующее систему возврата к зарядной стойке для подвижного робота, соответствующую предпочтительному варианту реализации настоящего изобретения.
Как показано на этой фигуре, система возврата к зарядной стойке для подвижного робота, соответствующая предпочтительному варианту реализации настоящего изобретения, содержит зарядную стойку 20, предназначенную для излучения беспроводного сигнала в непрерывном или периодическом режиме, и подвижный робот 100, содержащий множество направленных антенн 160, предназначенных для обнаружения беспроводного сигнала, излучаемого зарядной стойкой 20, причем, если уровень энергии, оставшейся в аккумуляторной батарее 140 подвижного робота 100, ниже заранее определенного значения, упомянутый подвижный робот 100 вычисляет параметры расстояния, характеризующие положение этого робота, находящегося на удалении от зарядной стойки 20, используя направление на источник беспроводного сигнала, определенное при помощи упомянутых направленных антенн 160, а также используя разницу во времени обнаружения беспроводного сигнала упомянутыми направленными антеннами 160, и возвращается к зарядной стойке 20 на основе упомянутых параметров расстояния.
Зарядная стойка 20 заряжает аккумуляторную батарею 140, снабжающую подвижный робот 100 электроэнергией, необходимой для приведения его в действие, и содержит схему, передающую беспроводной сигнал, обнаруживаемый направленными антеннами 160 этого робота. Зарядная стойка 20 передает беспроводной сигнал в непрерывном или периодическом режиме с заранее определенной полосой частот. Подробное описание схемы, передающей беспроводной сигнал, будет опущено, так как она считается хорошо известной.
Далее со ссылкой на Фиг.5 будет описан робот-уборщик как один из видов подвижного робота, соответствующего настоящему изобретению.
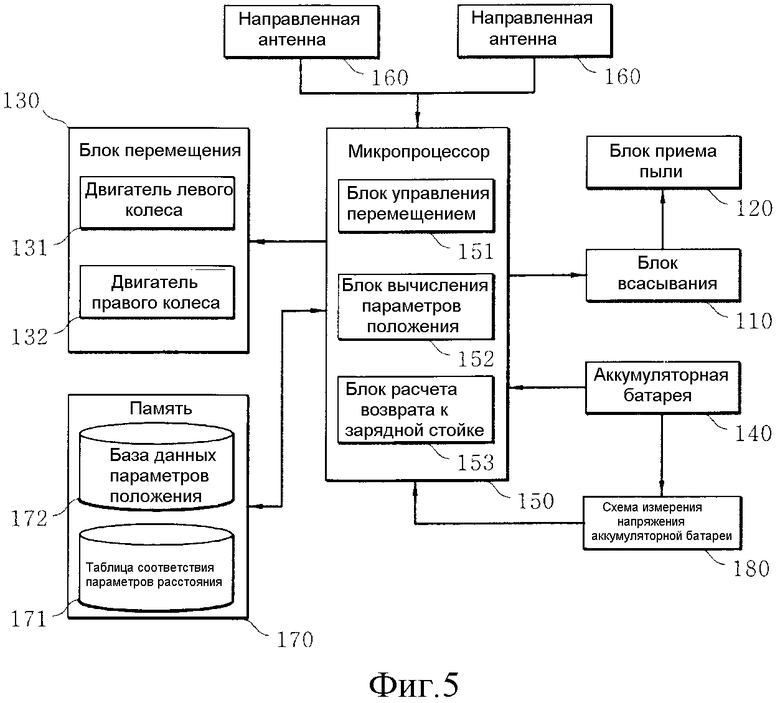
Фиг.5 представляет собой структурную схему робота-уборщика, являющегося примером подвижного робота в системе возврата к зарядной стойке, показанной на Фиг.4.
Как показано на этой фигуре, робот-уборщик 100, соответствующий одному из вариантов реализации настоящего изобретения, содержит блок 130 перемещения, содержащий двигатель 131 левого колеса и двигатель 132 правого колеса и предназначенный для перемещения робота-уборщика 100; схему 180 измерения напряжения аккумуляторной батареи, предназначенную для измерения напряжения аккумуляторной батареи 140, входящей в состав робота-уборщика 100, в каждом временном интервале и вывода сигнала запроса зарядки, если измеренное напряжение аккумуляторной батареи ниже эталонного значения; память 170, предназначенную для хранения рабочей программы робота-уборщика 100 и содержащую таблицу 171 соответствия параметров расстояния, используемую для определения расстояния между зарядной стойкой 20 и роботом-уборщиком 100 на основе разницы во времени обнаружения беспроводного сигнала направленными антеннами 160; и микропроцессор 150, предназначенный для управления всеми компонентами робота-уборщика 100 и содержащей блок 151 управления перемещением, блок 152 вычисления параметров положения и блок 153 расчета возврата к зарядной стойке, причем блок 151 управления перемещением управляет работой блока 130 перемещения на основе сигнала управления, блок 152 вычисления параметров положения посылает упомянутый сигнал управления в блок 151 управления перемещением для поворота робота-уборщика 100 с заранее определенной скоростью в каждом временном интервале, если принят сигнал запроса зарядки, вычисляет параметры расстояния и параметры направления, характеризующие положение робота-уборщика 100, находящегося на удалении от зарядной стойки 20, и выводит вычисленные параметры расстояния и параметры направления, а блок 153 расчета возврата к зарядной стойке посылает сигнал управления в блок 151 управления перемещением, чтобы обеспечить возврат робота-уборщика к зарядной стойке, исходя из вычисленных параметров расстояния и параметров направления, выведенных блоком 152 вычисления параметров положения.
Подробное описание конструктивных элементов робота-уборщика 100, входящего в состав системы возврата к зарядной стойке, соответствующей настоящему изобретению, которые идентичны элементам, показанным на Фиг.2, будет опущено. То есть, далее будут описаны схема 180 измерения напряжения аккумуляторной батареи и микропроцессор 150, показанные на Фиг.5, причем схема 180 измерения напряжения аккумуляторной батареи предназначена для измерения напряжения аккумуляторной батареи 140, входящей в состав робота-уборщика 100, в каждом временном интервале и вывода сигнала запроса зарядки, если измеренное напряжение аккумуляторной батареи ниже эталонного значения.
Схема 180 измерения напряжения аккумуляторной батареи делит напряжение, подаваемое аккумуляторной батареей 140, на заранее определенное значение сопротивления и выводит полученное в результате деления измеренное напряжение, причем аккумуляторная батарея 140 является составной частью робота-уборщика 100 и снабжает этот робот напряжением, необходимым для приведения его в действие. Микропроцессор 150 отображает на индикаторе уровень энергии, оставшейся в аккумуляторной батарее 140, в соответствии с уровнем измеренного напряжения, выведенного схемой 180 измерения напряжения аккумуляторной батареи. Кроме того, схема 180 измерения напряжения аккумуляторной батареи сравнивает напряжение, измеренное в аккумуляторной батарее 140, с эталонным значением напряжения, которое соответствует энергии, достаточной для работы робота-уборщика 100, и которое хранится в памяти 170, и посылает сигнал запроса зарядки в микропроцессор 150, если измеренное напряжение ниже упомянутого эталонного значения.
Микропроцессор 150 управляет всеми элементами робота-уборщика 100 и содержит блок 151 управления перемещением, блок 152 вычисления параметров положения и блок 153 расчета возврата к зарядной стойке, причем блок 151 управления перемещением управляет работой блока 130 перемещения на основе сигнала управления, а блок 152 вычисления параметров положения посылает сигнал управления в блок 151 управления перемещением для поворота робота-уборщика 100 с заранее определенной скоростью в каждом временном интервале, если принят сигнал запроса зарядки, вычисляет параметры направления, характеризующие положение робота-уборщика 100, находящегося на удалении от зарядной стойки 20, вычисляет разницу во времени обнаружения беспроводного сигнала направленными антеннами 160, обращается к таблице 171 соответствия параметров расстояния, находящейся в памяти, чтобы получить параметры расстояния, соответствующие упомянутой разнице во времени обнаружения, и выводит вычисленные параметры расстояния и параметры направления, а блок 153 расчета возврата к зарядной стойке посылает сигнал управления в блок 151 управления перемещением, чтобы обеспечить возврат робота-уборщика к зарядной стойке 20 на основе вычисленных параметров расстояния и параметров направления, выведенных блоком 152 вычисления параметров положения.
Блок 151 управления перемещением управляет работой блока 130 перемещения с целью перемещения робота-уборщика 100 в соответствии с сигналом управления, поступившим от рабочей программы этого робота.
Блок 152 вычисления параметров положения принимает сигнал запроса зарядки, выведенный блоком 180 измерения напряжения аккумуляторной батареи, посылает сигнал управления в блок 151 управления перемещением, чтобы задать поворот робота-уборщика 100 с заранее определенной скоростью, и определяет положение робота-уборщика 100 в каждом временном интервале. Одновременно блок 152 вычисления параметров положения выдает команду приведения в действие направленным антеннам 160. В результате робот-уборщик 100 поворачивается под управлением блока 151 управления перемещением, и одновременно с этим направленная антенна 160 обнаруживает беспроводной сигнал и выдает возникающий в результате сигнал обнаружения.
Когда блок 152 вычисления параметров положения принимает сигнал обнаружения от любой из множества направленных антенн 160, этот блок определяет направление на зарядную стойку 20, используя угол поворота робота-уборщика 100. При этом вычисленные параметры направления сохраняются в базе 172 данных параметров положения, находящейся в памяти 170, и используются при задании начального значения поворота при определении положения зарядной стойки 20 для следующего временного интервала. Таким образом, используя ранее определенное направление в качестве эталонного, можно быстро определить положение зарядной стойки 20.
Кроме того, после приема блоком 152 вычисления параметров положения сигнала обнаружения от любой из множества направленных антенн 160 этим блоком измеряется время, проходящее до выдачи сигнала обнаружения следующей направленной антенной. Это необходимо для измерения расстояния между зарядной стойкой 20 и роботом-уборщиком 100.
Блок 152 вычисления параметров положения вычисляет разницу во времени обнаружения беспроводного сигнала направленными антеннами 160 и обращается к таблице 171 соответствия параметров расстояния, находящейся в памяти, чтобы получить параметры расстояния, соответствующие упомянутой разнице во времени обнаружения. В данном случае таблица 171 соответствия параметров расстояния представляет собой таблицу, в которой хранятся значения, полученные экспериментальным путем в соответствии с настоящим изобретением.
Блок 152 вычисления параметров положения посылает параметры направления и параметры расстояния в блок 153 расчета возврата к зарядной стойке, причем направление на зарядную стойку 20 вычисляется с использованием угла поворота, первоначально определенного направленными антеннами 160 во время поворота робота-уборщика 100, а расстояние между роботом-уборщиком 100 и зарядной стойкой 20 вычисляется с использованием разницы во времени обнаружения беспроводного сигнала направленными антеннами 160.
Блок 153 расчета возврата к зарядной стойке посылает сигнал управления в блок 151 управления перемещением, используя вычисленные параметры расстояния и параметры направления для зарядной стойки 20, выведенные блоком 152 вычисления параметров положения. В результате блок 153 расчета возврата к зарядной стойке управляет работой блока 130 перемещения в соответствии с сигналом управления, поступившим в блок 151 управления перемещением, и обеспечивает возврат робота-уборщика к зарядной стойке 20.
В результате, после того, как робот-уборщик 100 обнаружил беспроводной сигнал, излучаемый зарядной стойкой 20, вычислил параметры направления, соответствующие положению зарядной стойки 20, и вычислил параметры расстояния, используя разницу во времени обнаружения беспроводного сигнала направленными антеннами 160, можно точно определить положение зарядной стойки и обеспечить эффективный возврат робота-уборщика 100 к зарядной стойке 20, даже в случае наличия препятствия между роботом-уборщиком 100 и зарядной стойкой 20.
Фиг.6 представляет собой блок-схему, иллюстрирующую способ возврата к зарядной стойке для робота-уборщика, соответствующий предпочтительному варианту реализации настоящего изобретения.
Как показано на Фиг.6, на первом этапе, когда пользователь вводит команду для приведения в действие робота-уборщика 100, который полностью заряжен, пользователь, например, нажимает кнопку ввода, расположенную на роботе-уборщике 100, или кнопку ввода, расположенную на пульте дистанционного управления (этап S101), рабочая программа посылает сигнал управления в блок 151 управления перемещением, соответствующий упомянутой команде приведения в действие. После чего робот-уборщик 100 начинает произвольным образом перемещаться в пределах зоны уборки и выполняет функцию уборки (этап S103) за счет приведения в действие блока 110 всасывания.
Затем блок 180 измерения напряжения аккумуляторной батареи, входящий в состав робота-уборщика 100, измеряет напряжение аккумуляторной батареи 140 в каждом временном интервале, чтобы определить время автоматической зарядки, соответствующее уровню энергии, оставшейся в аккумуляторной батарее 140. Блок 180 измерения напряжения аккумуляторной батареи сравнивает измеренное напряжение с эталонным значением напряжения, хранящимся в памяти 170, и посылает сигнал запроса зарядки в блок 152 вычисления параметров положения, входящий в состав микропроцессора 150, если измеренное напряжение ниже упомянутого эталонного значения.
Блок 152 вычисления параметров положения, входящий в состав микропроцессора 150, определяет, принят ли сигнал запроса зарядки (этап S105), и в случае приема сигнала запроса зарядки блок 152 вычисления параметров положения посылает сигнал управления в блок 151 управления перемещением, а блок 151 управления перемещением обеспечивает поворот робота-уборщика 100 с заранее определенной скоростью, чтобы определить положение робота-уборщика 100. Кроме того, блок 152 вычисления параметров положения выдает команду для приведения в действие направленных антенн 160 (этап S107). В результате робот-уборщик 100 поворачивается под управлением блока 151 управления перемещением, и одновременно с этим направленная антенна 160 обнаруживает беспроводной сигнал и выдает возникающий в результате сигнал обнаружения.
Когда блок 152 вычисления параметров положения принимает сигнал обнаружения, поступающий от любой из направленных антенн 160 (этап S109), этот блок определяет направление на зарядную стойку 20, используя угол поворота робота-уборщика 100 (этап S111).
В дополнение к этому, после того, как блок 152 вычисления параметров положения принял сигнал обнаружения от любой из множества направленных антенн 160, этот блок измеряет время, проходящее до выдачи сигнала обнаружения следующей направленной антенной (этап S113). Это необходимо для измерения расстояния между зарядной стойкой 20 и роботом-уборщиком 100.
Затем блок 152 вычисления параметров положения вычисляет разницу во времени обнаружения беспроводного сигнала направленными антеннами 160 и обращается к таблице 171 соответствия параметров расстояния, находящейся в памяти 170, чтобы получить параметры расстояния, соответствующие упомянутой разнице во времени обнаружения (этап S115). В данном случае таблица 171 соответствия параметров расстояния представляет собой таблицу, в которой хранятся значения, полученные экспериментальным путем в соответствии с настоящим изобретением.
На следующем этапе блок 152 вычисления параметров положения посылает параметры направления и параметры расстояния в блок 153 расчета возврата к зарядной стойке, причем направление на зарядную стойку 20 вычисляется при помощи угла поворота, первоначально определенного направленными антеннами 160 во время поворота робота-уборщика 100, а расстояние между роботом-уборщиком 100 и зарядной стойкой 20 вычисляется, используя разницу во времени обнаружения беспроводного сигнала направленными антеннами 160 (этап S117).
Затем блок 153 расчета возврата к зарядной стойке посылает сигнал управления в блок 151 управления перемещением, используя вычисленные параметры расстояния и параметры направления, характеризующие положение зарядной стойки 20, которые посланы блоком 152 вычисления параметров положения. В результате блок 153 расчета возврата к зарядной стойке приводит в действие блок 130 перемещения в соответствии с сигналом управления, поступившим в блок 151 управления перемещением, и обеспечивает возврат робота-уборщика к зарядной стойке 20 (этап S119).
Как видно из приведенного выше описания, настоящим изобретением предлагается система определения положения для подвижного робота, в которой, после того, как подвижный робот обнаружил беспроводной сигнал, излучаемый источником беспроводного сигнала, вычислил параметры направления, соответствующие положению источника беспроводного сигнала, и вычислил параметры расстояния, используя разницу во времени обнаружения беспроводного сигнала направленными антеннами, можно точно определить положение источника беспроводного сигнала, даже в случае наличия препятствия между подвижным роботом и источником беспроводного сигнала.
Кроме того, настоящим изобретением предлагается система возврата к зарядной стойке и способ использования данной системы, причем, если источником беспроводного сигнала является зарядная стойка, то вычисляя параметры направления и параметры расстояния, даже при наличии препятствия между подвижным роботом и зарядной стойкой, можно точно определить положение зарядной стойки и обеспечить эффективный возврат подвижного робота к зарядной стойке, когда уровень энергии, оставшейся в аккумуляторной батарее, является низким.
Хотя в целях иллюстрации были рассмотрены предпочтительные варианты реализации настоящего изобретения, специалистам в данной области техники очевидно, что возможны различные модификации, добавления и замены, не выходящие за пределы объема и сущности настоящего изобретения, определенных в пунктах приложенной Формулы изобретения.
Изобретение относится к подвижному роботу и к системе определения положения для подвижного робота. Подвижный робот способен точно определять положение источника беспроводного сигнала с использованием беспроводного сигнала. Это позволяет роботу безошибочно и быстро возвращаться к зарядной стойке, используя определенное положение. Система определения положения для подвижного робота содержит источник беспроводного сигнала, предназначенный для излучения беспроводного сигнала в непрерывном или периодическом режиме, подвижный робот, содержащий множество направленных антенн. Антенны предназначены для обнаружения упомянутого беспроводного сигнала, излучаемого источником беспроводного сигнала. Подвижный робот определяет направление на источник беспроводного сигнала с использованием угла поворота. Угол поворота определяется при помощи направленных антенн. Вычисляет расстояние, отделяющее его от упомянутого источника беспроводного сигнала с использованием разницы во времени обнаружения беспроводного сигнала направленными антеннами. Технический результат заключается в повышении эффективности возврата подвижного робота к зарядной стойке. 3 н. и 9 з.п. ф-лы, 6 ил.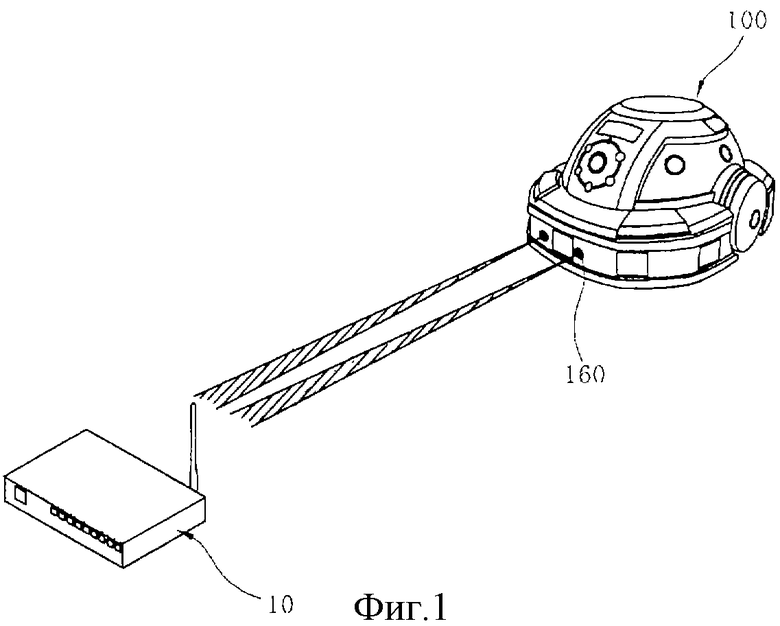
источник 10 беспроводного сигнала, предназначенный для излучения беспроводного сигнала в непрерывном или периодическом режиме; и
подвижный робот 100, содержащий множество направленных антенн 160, предназначенных для обнаружения упомянутого беспроводного сигнала, излучаемого источником 10 беспроводного сигнала, причем упомянутый подвижный робот 100 определяет направление на источник 10 беспроводного сигнала с использованием угла поворота, определенного при помощи упомянутых направленных антенн 160, и вычисляет расстояние, отделяющее его от упомянутого источника 10 беспроводного сигнала с использованием разницы во времени обнаружения беспроводного сигнала упомянутыми направленными антеннами 160.
блок 130 перемещения, который содержит двигатель 131 левого колеса и двигатель 132 правого колеса и предназначен для перемещения подвижного робота 100;
память 170, предназначенную для хранения рабочей программы подвижного робота 100, а также хранения параметров расстояния и параметров направления, характеризующих положение подвижного робота 100; и
микропроцессор 150, предназначенный для управления работой подвижного робота 100, вычисления параметров положения подвижного робота 100 и управления всеми элементами этого робота.
таблицу 171 соответствия параметров расстояния, предназначенную для поиска упомянутых параметров расстояния, соответствующих упомянутой разнице во времени обнаружения беспроводного сигнала направленными антеннами 160; и
базу 172 параметров положения, предназначенную для хранения упомянутых параметров расстояния и параметров направления, характеризующих положение робота-уборщика 100, находящегося на удалении от источника 10 беспроводного сигнала.
блок 151 управления перемещением, предназначенный для управления работой блока 130 перемещения на основе сигнала управления; и
блок 152 вычисления параметров положения, предназначенный для посылки упомянутого сигнала управления в блок 151 управления перемещением для поворота подвижного робота 100 с заранее определенной скоростью в каждом временном интервале, причем блок 152 вычисления параметров положения вычисляет упомянутые параметры направления на основе угла поворота для беспроводного сигнала, который обнаружен направленными антеннами 160, вычисляет упомянутые параметры расстояния для подвижного робота 100, обращаясь к таблице 171 соответствия параметров расстояния, чтобы получить параметры расстояния, соответствующие упомянутой разнице во времени обнаружения беспроводных сигналов, поступившей от направленных антенн 160, и сохраняет вычисленные параметры направления и параметры расстояния в базе 172 данных параметров положения.
зарядную стойку 20, предназначенную для излучения беспроводного сигнала в непрерывном или периодическом режиме; и
подвижный робот 100, содержащий, по меньшей мере, две направленные антенны 100, предназначенные для обнаружения упомянутого беспроводного сигнала, излучаемого зарядной стойкой 20, причем если уровень энергии, оставшейся в аккумуляторной батарее 140 подвижного робота 100, ниже заранее определенного значения, упомянутый подвижный робот 100 вычисляет параметры расстояния, характеризующие положение этого робота, находящегося на удалении от зарядной стойки 20, используя направление на зарядную стойку 20, определенное при помощи упомянутых направленных антенн 160, а также используя разницу во времени обнаружения беспроводного сигнала упомянутыми направленными антеннами 160, и возвращается к зарядной стойке 20 на основе упомянутых параметров расстояния.
блок 130 перемещения, который содержит двигатель 131 левого колеса и двигатель 132 правого колеса и предназначен для перемещения подвижного робота 100;
схему 180 измерения напряжения аккумуляторной батареи, предназначенную для измерения напряжения аккумуляторной батареи подвижного робота 100 в заранее определенном временном интервале и вывода сигнала запроса зарядки, если измеренное напряжение аккумуляторной батареи ниже эталонного значения;
память 170, предназначенную для хранения рабочей программы подвижного робота 100, а также хранения параметров расстояния между зарядной стойкой 20 и подвижным роботом 100; и
микропроцессор 150, предназначенный для управления работой подвижного робота 100, вычисления направления на зарядную стойку 20, вычисления параметров расстояния, отделяющего подвижный робот 100 от зарядной стойки 20, и управления всеми элементами этого робота.
блок 151 управления перемещением, предназначенный для управления работой блока 130 перемещения на основе сигнала управления;
блок 152 вычисления параметров положения, предназначенный для посылки упомянутого сигнала управления в блок 151 управления перемещением для поворота подвижного робота 100 с заранее определенной скоростью в каждом временном интервале, если принят сигнал запроса зарядки, причем блок 152 вычисления параметров положения вычисляет упомянутые параметры направления на основе угла поворота для беспроводного сигнала, который обнаружен направленными антеннами 160, вычисляет упомянутые параметры расстояния, обращаясь к таблице 171 соответствия параметров расстояния, чтобы получить параметры расстояния, соответствующие упомянутой разнице во времени обнаружения беспроводных сигналов, поступившей от направленных антенн 160, и выводит вычисленные параметры направления и параметры расстояния; и
блок 153 расчета возврата к зарядной стойке, предназначенный для посылки упомянутого сигнала управления в блок 151 управления перемещением, чтобы вернуть подвижный робот 100 к зарядной стойке 20, используя упомянутые параметры направления и параметры расстояния, вычисленные блоком 152 вычисления параметров положения.
измеряют напряжение аккумуляторной батареи подвижного робота в заранее определенном временном интервале и посылают сигнал запроса зарядки, если измеренное напряжение аккумуляторной батареи ниже эталонного значения;
обнаруживают беспроводной сигнал, излучаемый зарядной стойкой, с использованием направленной антенны, вычисляют параметры направления на зарядную стойку и параметры расстояния между зарядной стойкой и подвижным роботом, и выводят упомянутые параметры направления и параметры расстояния; и
возвращают подвижный робот к зарядной стойке, причем упомянутый блок расчета возврата к зарядной стойке обеспечивает возврат подвижного робота к зарядной стойке на основе упомянутых параметров направления и параметров расстояния, поступивших от упомянутого блока вычисления параметров положения.
вычисляют упомянутые параметры направления и выводят вычисленные параметры направления, причем упомянутый блок вычисления параметров положения вычисляет упомянутые параметры направления на основе угла поворота для беспроводного сигнала, который обнаружен упомянутой направленной антенной; и
вычисляют упомянутые параметры расстояния и выводят вычисленные параметры расстояния, причем упомянутый блок вычисления параметров положения выводит упомянутые параметры расстояния, обращаясь к таблице соответствия параметров расстояния, чтобы получить параметры расстояния, соответствующие разнице во времени обнаружения беспроводного сигнала, определенной с использованием, по меньшей мере, двух направленных антенн.
| СВАРНАЯ ПРОВОЛОЧНАЯ СЕТКА ДЛЯ ГАБИОНОВ | 2007 |
|
RU2398647C2 |
| US 5926909 А, 27.07.1999 | |||
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |

