Изобретение относится к радиолокационной технике, преимущественно к способу обнаружения и селекции эхо-сигналов от надводных целей, и может быть использовано в импульсных радиолокационных станциях (РЛС), предназначенных для судовождения, аэрокосмической разведки судов.
В настоящее время известны способы селекции надводных целей, основанные на различии доплеровских частот сигналов, отраженных от истинных целей и источников пассивных помех [1, 2].
Недостатком этих способов является ошибочная селекция в тех случаях, когда селектируемый объект (истинная цель) неподвижен или движется в направлении, перпендикулярном направлению распространения излучения (в этих случаях сигнал имеет доплеровскую частоту, равную нулю, и истинная цель может быть принята за ложную), а также когда источник пассивной помехи (ложная цель) движется так, что сигнал помехи имеет доплеровскую частоту, отличную от нуля (ложная цель может быть принята за истинную).
Известен также способ селекции надводных целей [3], в котором на первом этапе селекции излучают когерентные радиоимпульсы с постоянной несущей частотой, принимают отраженные сигналы, для каждого элемента разрешения по дальности фильтруют комплексные огибающие сигналов по доплеровской частоте на М равноотстоящих друг от друга частотных составляющих, измеряют их мощности, сравнивают результаты измерений с пороговым уровнем, принимают предварительное решение о наличии сигнала от истинной цели, если мощности не менее одной, но не более К смежных частотных составляющих превышают пороговый уровень, переходят ко второму этапу селекции, на котором излучают когерентные радиоимпульсы в течение n периодов повторения на несущей частоте, с перестройкой от зондирования к зондированию на m значений, принимают отраженные сигналы от целей, принятых за истинные на первом этапе, осуществляют процедуру когерентной обработки и фильтрации по доплеровской частоте комплексной огибающей на каждой из m несущих частот соответственно в m каналах, определяют максимальное значение мощности частотных составляющих в каждом из m каналов, по математической зависимости определяют нормированное усредненное значение модулей разностей максимальных значений частотных составляющих, сравнивают его с пороговым значением, при превышении которого принимают окончательное решение о наличии сигнала от истинной цели.
Известный способ селекции надводных целей основан на использовании для селекции эхо-сигналов от надводного корабля (НК) и пространственно распределенных отражателей типа облаков дипольных отражателей (ОДО) отличий частоты флуктуации амплитуды отраженного сигнала, а для селекции эхо-сигналов от НК и малоразмерных отражателей типа уголкового отражателя (УО) эффекта декорреляции эхо-сигналов от целей сложной конфигурации, состоящих из множества отражателей, какими являются НК, при перестройке несущей частоты на величину, достаточную для декорреляции сигнала от НК, в то время как для сигналов от одиночных отражателей, каковыми являются, в частности УО, декорреляция амплитуды эхо-сигналов при перестройке частоты не имеет места.
Этот способ является наиболее близким к заявляемому по технической сущности и выбирается в качестве прототипа.
Недостатками способа - прототипа являются, во-первых, возможность его реализации только с излучением когерентных зондирующих сигналов, во-вторых, требуется многоканальное приемное устройство, обеспечивающее фильтрацию частотных составляющих принимаемых сигналов, что усложняет приемное устройство РЛС, в-третьих, необходимость последовательного излучения и обработки подпачки импульсов на одной частоте для селекции истинной цели и ОДО, а затем - подпачки импульсов с перестройкой частоты от зондирования к зондированию по линейному закону для селекции истинной цели и УО, что увеличивает время на принятие решения о наличии сигнала от истинной цели.
Задачей изобретения является расширение класса РЛС, в которых возможны обнаружение и селекция надводных кораблей на фоне ложных целей из пространственно распределенных отражателей типа облаков дипольных отражателей (атмосферных осадков, облачности, стаи птиц, участка взволнованной морской поверхности), и малоразмерных отражателей типа уголкового отражателя (надувного уголкового отражателя, бакена, буя, знака, бочки и т.п.), что обусловлено отсутствием обязательного требования когерентности зондирующих сигналов, а также в сокращении времени на принятие решения об истинности обнаруженной цели за счет одновременного проведения селекции обнаруженной цели как НК и по критерию «НК-ОДО» и по критерию «НК-УО» при многочастотном зондировании с перестройкой несущей частоты на величину Δf от зондирования к зондированию на m частотах, не проводя дополнительные зондирования на постоянной несущей частоте.
В предлагаемом способе селекции надводных целей излучают радиоимпульсы в течение n периодов повторения, образующих подпачку, на несущей частоте fg (где g=1...m), с перестройкой от зондирования к зондированию на величину, достаточную для декорреляции сигнала от НК, на m значений, осуществляют прием отраженных сигналов, в каждом элементе разрешения по дальности производят накопление n принимаемых за подпачку сигналов, сравнение накопленного сигнала с пороговым уровнем и при превышении этим сигналом порогового уровня производят проверку по критерию «НК-ОДО», для чего весь массив из n зондирований делят на m массивов (по n/m зондирований в каждом), представляющих значения амплитуды отраженного сигнала на одной частоте, вычисляют количество пересечений амплитудой отраженного сигнала среднего значения амплитуды отраженного сигнала, накопленного за подпачку, в каждой из m реализации (на одной из m частот) по формуле

где g=1...m - номер частоты; ag - амплитуда отраженного сигнала; S - среднее значение амплитуды отраженного сигнала, накопленного за подпачку, затем рассчитанные значения Pg усредняют по всем частотам по формуле:  , полученный результат сравнивают с пороговым уровнем PO и если KПО<PO, то принимается решение, что обнаруженная цель является НК, в противном случае - ОДО, одновременно решают задачу селекции надводной цели по критерию «НК-УО», для чего вычисляют количество пересечений амплитудой отраженного сигнала на m соседних, равноотстоящих частотах в n зондированиях, среднего за подпачку значения амплитуды отраженного сигнала по формуле
, полученный результат сравнивают с пороговым уровнем PO и если KПО<PO, то принимается решение, что обнаруженная цель является НК, в противном случае - ОДО, одновременно решают задачу селекции надводной цели по критерию «НК-УО», для чего вычисляют количество пересечений амплитудой отраженного сигнала на m соседних, равноотстоящих частотах в n зондированиях, среднего за подпачку значения амплитуды отраженного сигнала по формуле

где g=2...m - номер частоты; k=0...( -1) - номер частотной группы; S - среднее значение амплитуды отраженного сигнала, затем полученный результат сравнивают с пороговым уровнем РУ, если KПУ<PУ, то принимается решение, что обнаруженная надводная цель является УО, в противном случае - НК, и в случае успешного выполнения двух критериев принимается решение о наличии отраженного сигнала от истинной цели.
-1) - номер частотной группы; S - среднее значение амплитуды отраженного сигнала, затем полученный результат сравнивают с пороговым уровнем РУ, если KПУ<PУ, то принимается решение, что обнаруженная надводная цель является УО, в противном случае - НК, и в случае успешного выполнения двух критериев принимается решение о наличии отраженного сигнала от истинной цели.
Сущность предлагаемого способа селекции надводных целей заключается в попеременном излучении и приеме n радиоимпульсов РЛС с перестройкой частоты от зондирования к зондированию на величину, достаточную для декорреляции сигнала от НК по линейному закону, на m частотах, и последующей обработкой всего массива эхо-сигналов по двум критериям "НК-УО" и "НК-ОДО" по всем элементам разрешения по дальности.
Обнаружение и селекция отраженных сигналов от цели происходит за подпачку, а затем результаты селекции усредняются по всем подпачкам, принадлежащим одной цели. При первичной обработке в каждом элементе разрешения по дальности происходит накопление n радиоимпульсов в каждой подпачке, сравнение накопленного сигнала с порогом, и принятие решения об обнаружении надводной цели.
Для всех элементов разрешения по дальности, в которых произошло обнаружение цели и уровень сигнала превышает минимально допустимую величину, но не находится в ограничении, производится селекция по двум критериям: во-первых, проверяется, является ли обнаруженная цель надводным кораблем или облаком дипольных отражателей (критерий «НК-ОДО»); во-вторых, проверяется, является ли обнаруженная цель надводным кораблем или у толковым отражателем (критерий «НК-УО»).
Предлагаемый способ селекции ложных целей (ЛЦ) типа ОДО и истинных целей типа НК для монохромных сигналов основан на отличии частоты флуктуации амплитуды отраженного сигнала от ОДО и НК, обусловленной различным временем корреляции сигнала (существенным отличием по ширине спектра). Оценка частоты флуктуации амплитуды отраженного сигнала производится путем вычисления количества пересечений амплитудой отраженного сигнала порога селекции в течение некоторого времени при зондировании на одной частоте.
Как правило, накопление входной информации в течение времени, достаточного для селекции, затруднено или невозможно по многим причинам, поэтому, в силу эргодичности случайного процесса флуктуации амплитуды, можно заменить накопление сигнала при реализации по времени на одной частоте накоплением сигнала при реализации на совокупности частот, что существенно уменьшает время на принятие решения об истинности обнаруженной цели.
В качестве среднего вычисляется математическое ожидание амплитуды отраженного сигнала за подпачку для m частот (с учетом эргодичности оно будет равно среднему по времени [4]) и вычисляется количество пересечений амплитудой отраженного сигнала этого среднего в каждой из m реализации (на одной из m частот). Далее полученный результат усредняется по всем частотам и сравнивается с некоторым пороговым значением и принимается решение об отношении обнаруженной цели к классу НК (истинных целей) или классу ОДО (ложных целей).
Способ селекции ЛЦ типа УО и истинной цели типа НК основан на отличии флуктуации амплитуды отраженного сигнала от УО и НК, при перестройке частоты от периода к периоду на величину Δf, достаточную для декорреляции сигнала. Величина перестройки частоты Δf зависит от протяженности объекта:  ; где с - скорость света; l - минимальная ожидаемая протяженность истинной цели в радиальном направлении.
; где с - скорость света; l - минимальная ожидаемая протяженность истинной цели в радиальном направлении.
В предлагаемом способе селекции надводных целей используется та же первичная информация, что и при селекции по критерию «НК-ОДО» и, следовательно, не требуется последовательно излучать и обрабатывать подпачки импульсов на одной частоте для селекции истинной цели и ОДО, а затем - подпачки импульсов с перестройкой частоты от зондирования к зондированию по линейному закону для селекции истинной цели и УО.
Для реализации прелагаемого способа вычисляется количество пересечений амплитудой отраженного сигнала на m соседних, равноотстоящих частотах за n зондирований среднего значения амплитуды сигнала за подпачку, которое сравнивается с некоторым пороговым значением и принимается решение об отношении обнаруженной цели к классу НК (истинных целей) или классу УО (ложных целей). Цель считается истинной, если она отнесена к классу НК по обоим критериям.
Предлагаемый способ селекции надводных целей поясняется структурной схемой устройства, реализующего способ, которая приведена на чертеже.
Устройство содержит антенну (А) - блок 1, антенный переключатель (АП) - блок 2, передающее устройство (ПУ) - блок 3, синтезатор частот (СЧ) - блок 4, синхронизатор (СИ) - блок 5, входной модуль-усилитель высокой частоты с преобразованием на промежуточную частоту fПЧ - блок 6, усилитель промежуточной частоты (УПЧ), где происходит усиление и фильтрация сигнала - блок 7, последовательно соединенный с детектором (ДТ) - блок 8, аналого-цифровой преобразователь (АЦП), обнаружитель, селекторы ОДО и УО, входящие в блок обработки информации (БОИ) - блок 9, и ЦВУ - блок 10.
Передающее устройство (блок 3) последовательно формирует зондирующие сигналы на несущей частоте fg с перестройкой частоты на величину Δf от зондирования к зондированию на m частотах, которые через антенный переключатель (блок 2) поступают на антенну (блок 1) и излучаются в пространство. Перестройка частоты обеспечивается синтезатором частот (блок 4), который управляется ЦВУ (блок 11) через синхронизатор (блок 5). Эхо-сигналы, принятые антенной (блок 1), через антенный переключатель (блок 2) поступают на входной модуль (блок 6), в котором происходит усиление принятого сигнала и перенос его спектра с несущей частоты fg на промежуточную частоту fПЧ с использованием сигнала гетеродина fr, формируемого синтезатором частот (блок 4). Далее в блоке УПЧ (блок 7) производится усиление и фильтрация сигнала и затем его детектирование (блок 8). Видеоимпульсы далее поступают в БОИ (блок 9), в котором производится аналого-цифровое преобразование и первичная обработка принятых сигналов.
При первичной обработке в каждом элементе разрешения по дальности происходит накопление n радиоимпульсов в каждой подпачке, сравнение накопленного сигнала с пороговым уровнем, и принятие решения об обнаружении надводной цели.
Далее в БОИ для всех элементов разрешения по дальности, в которых произошло обнаружение цели и уровень сигнала превышает минимально допустимую величину  , где
, где  - средний уровень шумов приемника, но не находится в ограничении, производится анализ флуктуации амплитуды по критерию «НК-ОДО». Для этого сначала вычисляется количество пересечений амплитудой отраженного сигнала ag среднего значения S в n/m точках в каждой из m реализации (на одной из m частот) по формуле
- средний уровень шумов приемника, но не находится в ограничении, производится анализ флуктуации амплитуды по критерию «НК-ОДО». Для этого сначала вычисляется количество пересечений амплитудой отраженного сигнала ag среднего значения S в n/m точках в каждой из m реализации (на одной из m частот) по формуле
где g=1...m - номер частоты; ag - амплитуда отраженного сигнала; S - среднее значение амплитуды отраженного сигнала. Затем рассчитанные значения Pg усредняются по всем частотам по формуле  .
.
Полученный результат передается в ЦВУ (блок 10), где он сравнивается с пороговым уровнем РO и если KПО<PO, то принимается решение, что обнаруженная цель является НК, в противном случае - ОДО.
Одновременно с этим проверяется, не является ли обнаруженная цель УО. Для этого в БОИ вычисляется количество пересечений амплитудой отраженного сигнала среднего значения амплитуды в n зондированиях, полученных на m соседних, равноотстоящих частотах по формуле
где g=2...m - номер частоты; k=0...( -1) - номер частотной группы; S - среднее значение амплитуды сигнала.
-1) - номер частотной группы; S - среднее значение амплитуды сигнала.
Полученный результат передается в ЦВУ, где сравнивается с пороговым уровнем РУ. Если KПУ<РУ, то принимается решение, что обнаруженная надводная цель является УО, в противном случае - НК. Пороговый уровень РУ выбирается в пределах 0<РУ<64, исходя из допустимой вероятности ложной селекции.
Цель считается истинной, если она отнесена к классу НК по обоим критериям.
Технический результат от использования предлагаемого способа по сравнению с прототипом заключается в расширении класса РЛС, в которых возможны обнаружение и селекция надводных кораблей на фоне ложных целей из пространственно распределенных отражателей типа облаков дипольных отражателей (атмосферных осадков, облачности, стаи птиц, участка взволнованной морской поверхности), и малоразмерных отражателей типа уголкового отражателя (надувного уголкового отражателя, бакена, буя, знака, бочки и т.п.), что обусловлено отсутствием обязательного требования когерентности зондирующих сигналов, а также в сокращении времени на принятие решения об истинности обнаруженной цели за счет одновременного проведения селекции обнаруженной цели как НК и по критерию «НК-ОДО» и по критерию «НК-УО» при многочастотном зондировании с перестройкой несущей частоты на величину Δf от зондирования к зондированию на m частотах, не проводя дополнительные зондирования на постоянной несущей частоте.
Источники информации
1. Бакулев П.А. Радиолокация движущихся целей. - Сов. радио, 1964.
2. Патент США №4119966, МПК G01S 13/52, 1978.
3. Патент РФ №2083996, МПК G01S 13/524, 1995 - прототип.
4. Мддлтон Д. Введение в статистическую теорию связи. - M.: Сов. радио, 1961, стр.86.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СПОСОБ МОНИТОРИНГА ОПАСНЫХ КАРСТОВЫХ И ОПОЛЗНЕВЫХ УЧАСТКОВ В ЗОНЕ ЖЕЛЕЗНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ЕСТЕСТВЕННЫХ СТАБИЛЬНЫХ ОТРАЖЕНИЙ | 2009 |
|
RU2405171C1 |
| СПОСОБ РАДИООПТИЧЕСКОЙ МАСКИРОВКИ НАДВОДНОГО КОРАБЛЯ | 2017 |
|
RU2660518C1 |
| Способ формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными ГСН, включающий комплекс известных устройств для его осуществления и визуализации | 2019 |
|
RU2726026C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И АЗИМУТАЛЬНОЙ КООРДИНАТЫ НАДВОДНЫХ ЦЕЛЕЙ РАДИОЛОКАТОРАМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2014 |
|
RU2566662C1 |
| СПОСОБ ПОЛЯРИМЕТРИЧЕСКОЙ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2769970C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
Изобретение относится к радиолокационной технике и может быть использовано в импульсных радиолокационных станциях, предназначенных для судовождения, аэрокосмической разведки судов. Достигаемый технический результат заключается в расширении класса РЛС, в которых возможны обнаружение и селекция надводных кораблей на фоне ложных целей из пространственно распределенных отражателей типа облаков дипольных отражателей (атмосферных осадков, облачности, стаи птиц, участка взволнованной морской поверхности), и малоразмерных отражателей типа уголкового отражателя (надувного уголкового отражателя, бакена, буя, знака, бочки и т.п.), а также в сокращении времени на принятие решения об истинности обнаруженной цели за счет одновременного проведения селекции обнаруженной цели как надводного корабля и по критерию «надводный корабль - облако дипольных отражателей» и по критерию «надводный корабль - уголковый отражатель» при многочастотном зондировании с перестройкой несущей частоты на величину Δf от зондирования к зондированию на m частотах, не проводя дополнительные зондирования на постоянной несущей частоте. 1 ил.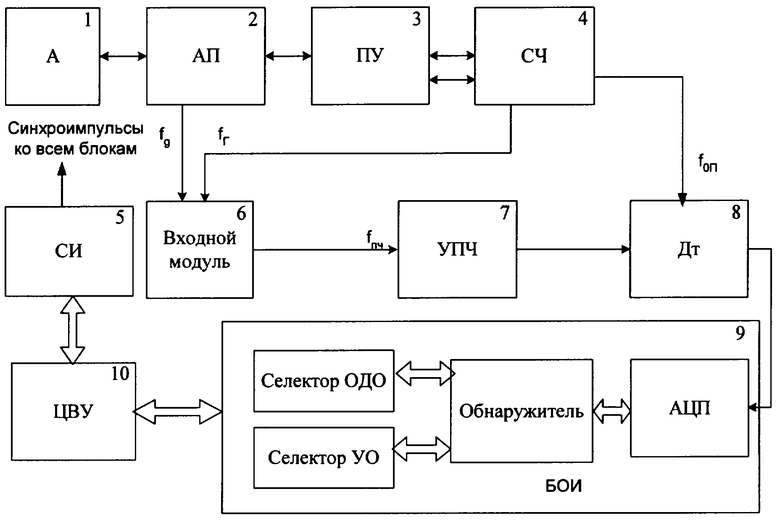
Способ селекции надводных целей, заключающийся в том, что в качестве надводных целей принимаются надводные корабли (НК), пространственно распределенные отражатели типа облаков дипольных отражателей (ОДО) и малоразмерные отражатели типа уголкового отражателя (УО), заключающийся в том, что излучают радиоимпульсы на несущей перестраиваемой частоте, отличающийся тем, что излучают радиоимпульсы, образующие подпачку, в течение n периодов повторения на несущей частоте fg(где g=1...m), с перестройкой от зондирования к зондированию на величину, достаточную для декорреляции сигнала от НК, для m значений частоты, осуществляют прием отраженных сигналов, в каждом элементе разрешения по дальности производят накопление n принимаемых за подпачку сигналов, сравнивают накопленный сигнал с пороговым уровнем и при превышении этим сигналом порогового уровня производят проверку по критерию «НК-ОДО», для чего весь массив из n зондирований делят на m массивов по n/m зондировании в каждом, представляющих значения амплитуды отраженного сигнала на одной частоте, вычисляют количество пересечений амплитудой отраженного сигнала среднего значения амплитуды отраженного сигнала, накопленного за период образования подпачки, в каждой из m реализации, на одной из m частот, по формуле:

где g=1...m - номер частоты, ag - амплитуда отраженного сигнала, S - среднее значение амплитуды отраженного сигнала, накопленного за подпачку, затем рассчитанные значения Pg усредняют по всем частотам по формуле:  полученный результат сравнивают с пороговым уровнем РO и если КПО<РО, то принимается решение, что обнаруженная цель является НК, в противном случае - ОДО, одновременно решают задачу селекции надводной цели по критерию «НК-УО», для чего вычисляют количество пересечений амплитудой отраженного сигнала на m соседних, равноотстоящих частотах в n зондированиях, среднего за подпачку значения амплитуды отраженного сигнала по формуле:
полученный результат сравнивают с пороговым уровнем РO и если КПО<РО, то принимается решение, что обнаруженная цель является НК, в противном случае - ОДО, одновременно решают задачу селекции надводной цели по критерию «НК-УО», для чего вычисляют количество пересечений амплитудой отраженного сигнала на m соседних, равноотстоящих частотах в n зондированиях, среднего за подпачку значения амплитуды отраженного сигнала по формуле:

где g=2...m - номер частоты, k=0...( -1) - номер частотной группы, S - среднее значение амплитуды отраженного сигнала, затем полученный результат сравнивают с пороговым уровнем Ру, если КПУ<Ру, то принимается решение, что обнаруженная надводная цель является УО, в противном случае - НК, и в случае успешного выполнения двух критериев принимается решение о наличии отраженного сигнала от истинной цели.
-1) - номер частотной группы, S - среднее значение амплитуды отраженного сигнала, затем полученный результат сравнивают с пороговым уровнем Ру, если КПУ<Ру, то принимается решение, что обнаруженная надводная цель является УО, в противном случае - НК, и в случае успешного выполнения двух критериев принимается решение о наличии отраженного сигнала от истинной цели.
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| US 5784026 A, 21.07.1998 | |||
| US 4533916, 06.08.1985 | |||
| US 6137439 A, 24.10.2000 | |||
| WO 2005071436 A1, 04.08.2005. | |||

