Область техники
Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например, беспилотного летательного аппарата (БЛА).
Уровень техники
Характеристика аналогов технического решения
Известен способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающийся во вращении по периодическому закону управления инерциального измерительного блока, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, коррекцию параметров закона управления инерциальным измерительным блоком на основании функциональной зависимости между оптимальными параметрами закона управления и данными об изменении в процессе эксплуатации инструментальных погрешностей лазерных гироскопов [1].
Известно устройство, реализующее данный способ, включающее инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсы, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой преобразователь и цифроаналоговый преобразователь, шину навигационной информации, блок коррекции, в состав которого входят счетчик времени, блок определения погрешностей лазерных гироскопов, блок выдачи сигнала коррекции, блок выдачи параметров закона управления, при этом входы блока определения погрешностей лазерных гироскопов соединены с выходами блока управления и отображения информации и счетчика времени, выход которого соединен с блоком выдачи сигнала коррекции; выход блока выдачи параметров закона управления соединен с входом блока электроники инерциального измерительного блока и интерфейсов, а входы - с выходами блока определения погрешностей лазерных гироскопов и блока выдачи сигнала коррекции [1].
Недостатком известных способа и устройства является недостаточная точность автономного счисления навигационных параметров, обусловленная воздействием динамических погрешностей чувствительных элементов, возникающих при дополнительном вращении блока чувствительных элементов.
Характеристика выбранного прототипа
Наиболее близкими к изобретению являются способ определения навигационных параметров летательного аппарата, заключающийся в измерении направления и величины векторов угловой скорости летательного аппарата относительно измерительной системы координат, определении текущей ориентации измерительной системы координат относительно навигационной системы координат, модуляции погрешностей составляющих векторов угловой скорости, определении текущих значений навигационных параметров по измеренным векторам ускорения и угловых скоростей и текущей ориентации измерительной системы координат, определении направления вектора погрешности текущей ориентации измерительной системы координат и модуляции этого вектора погрешности [2].
Наиболее близким устройством, реализующим данный способ, является устройство для определения навигационных параметров летательного аппарата, представляющее собой бесплатформенную инерциальную навигационную систему, содержащую блок датчиков линейных ускорений или линейных скоростей, блок датчиков угловых скоростей и вычислитель вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоком датчиков линейных ускорений или линейных скоростей, а также программными механизмами углового разворота, число которых соответствует числу датчиков угловых скоростей в блоке датчиков угловых скоростей, при этом каждый программный механизм программного разворота кинематически связан с соответствующим датчиком угловой скорости, вход каждого из программных механизмов программного разворота связан с выходом вычислителя вектора состояния объекта, дополнительно содержит вторую аналогичную бесплатформенную инерциальную навигационную систему, образуя при этом инерциальную навигационную мультисистему, при этом два блока измерителей которой одновременно разворачиваются в пространстве в противоположных направлениях программными механизмами углового разворота (силовой частью датчиков углов) по сигналу, вырабатываемому устройством управления, состоящим из определителя разности модуля векторов ошибок угловых скоростей и формирователя управляющего сигнала [2].
Недостатком известных способа и устройства является недостаточная точность автономного счисления навигационных параметров на начальном этапе функционирования системы и при длительном функционировании системы. Это обусловлено воздействием динамических погрешностей чувствительных элементов, возникающих при дополнительном вращении блока чувствительных элементов. К динамическим погрешностям чувствительных элементов относятся перекосы осей чувствительности гироскопов и ошибки масштабного коэффициента гироскопов. Перекосы осей чувствительности гироскопов приводят к повышению ошибки определения пилотажно-навигационных параметров на начальном этапе функционирования системы. Ошибки определения координат, обусловленные погрешностью масштабных коэффициентов гироскопов (в первую очередь азимутального гироскопа), пропорциональны квадрату времени функционирования системы и сильно сказываются при длительном функционировании системы.
Задача и технический результат изобретения
Задачей и техническим результатом изобретения является повышение точности определения пилотажных и навигационных параметров полета БЛА за счет объединения инерциальной навигационной системы с автокомпенсацией погрешностей и бесплатформенной инерциальной навигационной системы (БИНС). Определяются точностные характеристики систем на различных временных интервалах, и осуществляется комплексная оценка пилотажно-навигационных параметров на основании данных двух систем.
Технический результат предлагаемого способа достигается тем, что в способе определения параметров летательного аппарата, заключающимся в измерении угловой скорости и ускорения БЛА комплектом измерителей угловой скорости и акселерометров, объединенных в блок чувствительных элементов, в автономной компенсации погрешностей измерителей угловой скорости и акселерометров путем принудительного вращения блока чувствительных элементов, в определении текущей ориентации измерительной системы координат относительно навигационной системы координат, в измерении углов ориентации измерительной системы координат относительно системы координат, связанной с БЛА, в определении текущих значений навигационных параметров по измеренным значениям ускорения и угловых скоростей, в определении текущей ориентации БЛА по измеренным значениям угловых скоростей и ориентации измерительной системы координат относительно системы координат, связанной с БЛА, с целью повышения точности определения пилотажно-навигационных параметров БЛА, дополнительно осуществляют измерение угловой скорости и ускорения неподвижным относительно корпуса БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, объединенных в дополнительный блок чувствительных элементов, определяют текущие значения навигационных параметров по измеренным значениям ускорения и угловых скоростей дополнительным комплектом измерителей угловой скорости и акселерометров, определяют ориентацию БЛА относительно навигационной системы координат по измеренным значениям угловых скоростей БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров, вычисленных на основании показаний измерителей угловой скорости и акселерометров подвижного блока чувствительных элементов, определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров, вычисленных на основании показаний измерителей угловой скорости и акселерометров дополнительного блока чувствительных элементов, неподвижного относительно корпуса БЛА, определяют текущее значение пилотажно-навигационных параметров БЛА как взвешенную сумму соответствующих пилотажно-навигационных параметров, вычисленных на основании показаний подвижного и неподвижного блоков чувствительных элементов.
Технический результат предлагаемого устройства достигается тем, что в устройство для инерциальной навигации БЛА, включающее первый, второй, третий, четвертый, пятый и шестой акселерометры, первый, второй и третий датчики угла, первый, второй, третий, четвертый, пятый и шестой измерители угловой скорости, поворотное устройство, при этом первый, второй, третий акселерометры, первый, второй, третий датчики угла, первый, второй, третий измерители угловой скорости объединены в первый блок чувствительных элементов, который закреплен на поворотном устройстве, четвертый, пятый, шестой акселерометры, четвертый, пятый, шестой измерители угловой скорости объединены во второй блок чувствительных элементов с целью повышения точности определения пилотажно-навигационных параметров БЛА дополнительно введены пилотажно-навигационный вычислитель, вычислитель погрешностей пилотажно-навигационных параметров, первый, второй и третий блоки оценки, при этом выходы первого, второго и третьего акселерометров соединены с первым входом пилотажно-навигационного вычислителя и седьмым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы первого, второго и третьего датчика угла соединены со вторым входом пилотажно-навигационный вычислителя, выходы первого, второго и третьего измерителей угловой скорости соединены с третьим входом пилотажно-навигационного вычислителя и девятым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы четвертого, пятого и шестого акселерометров соединены с четвертым входом пилотажно-навигационного вычислителя и восьмым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы четвертого, пятого и шестого измерителей угловой скорости соединены с пятым входом пилотажно-навигационного вычислителя и десятым входом вычислителя погрешностей пилотажно-навигационных параметров, первый и пятый выходы пилотажно-навигационного вычислителя соединены соответственно с первым и вторым входами первого блока оценки, второй выход пилотажно-навигационного вычислителя соединен с первыми входами второго блока оценки и вычислителя погрешностей пилотажно-навигационных параметров, третий выход пилотажно-навигационного вычислителя соединен с первым входом третьего блока оценки и вторым входом вычислителя погрешностей пилотажно-навигационных параметров, четвертый выход пилотажно-навигационного вычислителя соединен с третьим входом вычислителя погрешностей пилотажно-навигационных параметров, шестой выход пилотажно-навигационного вычислителя соединен со вторым входом второго блока оценки и четвертым входом вычислителя погрешностей пилотажно-навигационных параметров, седьмой выход пилотажно-навигационного вычислителя соединен со вторым входом третьего блока оценки и пятым входом вычислителя погрешностей пилотажно-навигационных параметров, восьмой выход пилотажно-навигационного вычислителя соединен с шестым входом вычислителя погрешностей пилотажно-навигационных параметров, первый и второй выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами первого блока оценки, третий и четвертый выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами второго блока оценки, пятый и шестой выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами третьего блока оценки, выходы первого, второго и третьего блоков оценки являются соответственно первым, вторым и третьим выходами устройства.
В заявляемом устройстве пилотажно-навигационный вычислитель включает первый, второй и третий вычислители матрицы направляющих косинусов, первый и второй вычислители скоростей, первый и второй вычислители параметров ориентации, первый и второй вычислители координат, первый и второй вычислители угловых скоростей, причем первый вход пилотажно-навигационного вычислителя соединен с первым входом первого вычислителя скоростей, второй вход пилотажно-навигационного вычислителя соединен с первым входом второго вычислителя матрицы направляющих косинусов, выход которого через первый вычислитель параметров ориентации соединен с первым выходом пилотажно-навигационного вычислителя, третий вход пилотажно-навигационного вычислителя соединен с первым входом первого вычислителя матрицы направляющих косинусов, выход которого соединен со вторым входом второго вычислителя матрицы направляющих косинусов, четвертым входом первого вычислителя скоростей и четвертым выходом пилотажно-навигационного вычислителя, четвертый вход пилотажно-навигационного вычислителя соединен с первым входом второго вычислителя скоростей, пятый вход пилотажно-навигационного вычислителя соединен с первым входом третьего вычислителя матрицы направляющих косинусов, выход которого соединен с четвертым входом второго вычислителя скоростей, восьмым выходом пилотажно-навигационного вычислителя и через второй вычислитель параметров ориентации соединен с пятым выходом пилотажно-навигационного вычислителя, выход первого вычислителя скоростей соединен с входом первого вычислителя координат и со вторым выходом пилотажно-навигационного вычислителя, выход первого вычислителя координат соединен со вторым входом первого вычислителя скоростей, с третьим выходом пилотажно-навигационного вычислителя и с входом первого вычислителя угловых скоростей, выход которого соединен с третьим входом первого вычислителя скоростей и вторым входом первого вычислителя матрицы направляющих косинусов, выход второго вычислителя скоростей соединен с входом второго вычислителя координат и шестым выходом пилотажно-навигационного вычислителя, выход второго вычислителя координат соединен со вторым входом второго вычислителя скоростей, входом второго вычислителя угловых скоростей и седьмым выходом пилотажно-навигационного вычислителя, выход второго вычислителя угловых скоростей соединен с третьим входом второго вычислителя скоростей и вторым входом третьего вычислителя матрицы направляющих косинусов.
В заявляемом устройстве вычислитель погрешностей пилотажно-навигационных параметров включает первый и второй вычислители матрицы состояния, первый и второй вычислитель матрицы возмущения, первый и второй вычислители ковариационной матрицы ошибок, причем первый, второй, третий, седьмой и девятый входы вычислителя погрешностей пилотажно-навигационных параметров соединены с первым - пятым входами первого вычислителя матрицы состояния, выход которого соединен с первым входом первого вычислителя ковариационной матрицы ошибок, выход первого вычислителя матрицы возмущения соединен со вторым входом первого вычислителя ковариационной матрицы ошибок, первый, второй и третий выходы которого соединены с первым, третьим и пятым выходами вычислителя погрешностей пилотажно-навигационных параметров соответственно, четвертый, пятый, шестой, восьмой и десятый входы вычислителя погрешностей пилотажно-навигационных параметров соединены с первым - пятым входами второго вычислителя матрицы состояния, выход которого соединен с первым входом второго вычислителя ковариационной матрицы ошибок, выход второго вычислителя матрицы возмущения соединен со вторым входом второго вычислителя ковариационной матрицы ошибок, первый, второй и третий выходы которого соединены со вторым, четвертым и шестым выходами вычислителя погрешностей пилотажно-навигационных параметров соответственно.
Достижение технического результата в заявляемом изобретении обеспечивается путем применения новых действий (операций), введением новых блоков, а также за счет возникновения новых связей между известными (ограничительными) и новыми (отличительными) признаками.
Таким образом, введение совокупности новых существенных признаков является неочевидным изобретательским решением, имеющим технический характер.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной области техники, а также в смежных областях, с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Раскрытие изобретения
Сущность изобретения и отличительные (от прототипа) признаки
Способ инерциальной навигации беспилотного летательного аппарата (БЛА), заключающийся в измерении угловой скорости и ускорения БЛА комплектом измерителей угловой скорости и акселерометров, объединенных в блок чувствительны элементов, в автономной компенсации погрешностей измерителей угловой скорости и акселерометров путем принудительного вращения блока чувствительных элементов, в определении текущей ориентации измерительной системы координат относительно навигационной системы координат, в измерении углов ориентации измерительной системы координат относительно системы координат, связанной с БЛА, в определении текущих значений навигационных параметров по измеренным значениям ускорения и угловых скоростей, определении текущей ориентации БЛА по измеренным значениям угловых скоростей и ориентации измерительной системы координат относительно системы координат, связанной с БЛА, отличающийся тем, что с целью повышения точности определения пилотажно-навигационных параметров БЛА осуществляют измерение угловой скорости и ускорения неподвижным относительно корпуса БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, объединенных в дополнительный блок чувствительных элементов, определяют текущие значения навигационных параметров по измеренным значениям ускорения и угловых скоростей дополнительным комплектом измерителей угловой скорости и акселерометров, определяют ориентацию БЛА относительно навигационной системы координат по измеренным значениям угловых скоростей БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров, вычисленных на основании показаний измерителей угловой скорости и акселерометров подвижного блока чувствительных элементов, определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров, вычисленных на основании показаний измерителей угловой скорости и акселерометров дополнительного блока чувствительных элементов, неподвижного относительно корпуса БЛА, определяют текущее значение пилотажно-навигационных параметров БЛА как взвешенную сумму соответствующих пилотажно-навигационных параметров, вычисленных на основании показаний подвижного и неподвижного блоков чувствительных элементов.
Устройство для инерциальной навигации БЛА, включающее первый, второй, третий, четвертый, пятый и шестой акселерометры, первый, второй и третий датчики угла, первый, второй, третий, четвертый, пятый и шестой измерители угловой скорости, поворотное устройство, при этом первый, второй, третий акселерометры, первый, второй, третий датчики угла, первый, второй, третий измерители угловой скорости объединены в первый блок чувствительных элементов, который закреплен на поворотном устройстве, четвертый, пятый, шестой акселерометры, четвертый, пятый, шестой измерители угловой скорости объединены во второй блок чувствительных элементов, отличающееся тем, что с целью повышения точности определения пилотажно-навигационных параметров БЛА в него дополнительно введены пилотажно-навигационный вычислитель, вычислитель погрешностей пилотажно-навигационных параметров, первый, второй и третий блоки оценки, при этом выходы первого, второго и третьего акселерометров соединены с первым входом пилотажно-навигационного вычислителя и седьмым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы первого, второго и третьего датчика угла соединены со вторым входом пилотажно-навигационный вычислителя, выходы первого, второго и третьего измерителей угловой скорости соединены с третьим входом пилотажно-навигационного вычислителя и девятым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы четвертого, пятого и шестого акселерометров соединены с четвертым входом пилотажно-навигационного вычислителя и восьмым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы четвертого, пятого и шестого измерителей угловой скорости соединены с пятым входом пилотажно-навигационного вычислителя и десятым входом вычислителя погрешностей пилотажно-навигационных параметров, первый и пятый выходы пилотажно-навигационного вычислителя соединены соответственно с первым и вторым входами первого блока оценки, второй выход пилотажно-навигационного вычислителя соединен с первыми входами второго блока оценки и вычислителя погрешностей пилотажно-навигационных параметров, третий выход пилотажно-навигационного вычислителя соединен с первым входом третьего блока оценки и вторым входом вычислителя погрешностей пилотажно-навигационных параметров, четвертый выход пилотажно-навигационного вычислителя соединен с третьим входом вычислителя погрешностей пилотажно-навигационных параметров, шестой выход пилотажно-навигационного вычислителя соединен со вторым входом второго блока оценки и четвертым входом вычислителя погрешностей пилотажно-навигационных параметров, седьмой выход пилотажно-навигационного вычислителя соединен со вторым входом третьего блока оценки и пятым входом вычислителя погрешностей пилотажно-навигационных параметров, восьмой выход пилотажно-навигационного вычислителя соединен с шестым входом вычислителя погрешностей пилотажно-навигационных параметров, первый и второй выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами первого блока оценки, третий и четвертый выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами второго блока оценки, пятый и шестой выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами третьего блока оценки, выходы первого, второго и третьего блоков оценки являются соответственно первым, вторым и третьим выходами устройства.
Устройство, отличающееся тем, что пилотажно-навигационный вычислитель включает первый, второй и третий вычислители матрицы направляющих косинусов, первый и второй вычислители скоростей, первый и второй вычислители параметров ориентации, первый и второй вычислители координат, первый и второй вычислители угловых скоростей, причем первый вход пилотажно-навигационного вычислителя соединен с первым входом первого вычислителя скоростей, второй вход пилотажно-навигационного вычислителя соединен с первым входом второго вычислителя матрицы направляющих косинусов, выход которого через первый вычислитель параметров ориентации соединен с первым выходом пилотажно-навигационного вычислителя, третий вход пилотажно-навигационного вычислителя соединен с первым входом первого вычислителя матрицы направляющих косинусов, выход которого соединен со вторым входом второго вычислителя матрицы направляющих косинусов, четвертым входом первого вычислителя скоростей и четвертым выходом пилотажно-навигационного вычислителя, четвертый вход пилотажно-навигационного вычислителя соединен с первым входом второго вычислителя скоростей, пятый вход пилотажно-навигационного вычислителя соединен с первым входом третьего вычислителя матрицы направляющих косинусов, выход которого соединен с четвертым входом второго вычислителя скоростей, восьмым выходом пилотажно-навигационного вычислителя и через второй вычислитель параметров ориентации соединен с пятым выходом пилотажно-навигационного вычислителя, выход первого вычислителя скоростей соединен с входом первого вычислителя координат и со вторым выходом пилотажно-навигационного вычислителя, выход первого вычислителя координат соединен со вторым входом первого вычислителя скоростей, с третьим выходом пилотажно-навигационного вычислителя и с входом первого вычислителя угловых скоростей, выход которого соединен с третьим входом первого вычислителя скоростей и вторым входом первого вычислителя матрицы направляющих косинусов, выход второго вычислителя скоростей соединен с входом второго вычислителя координат и шестым выходом пилотажно-навигационного вычислителя, выход второго вычислителя координат соединен со вторым входом второго вычислителя скоростей, входом второго вычислителя угловых скоростей и седьмым выходом пилотажно-навигационного вычислителя, выход второго вычислителя угловых скоростей соединен с третьим входом второго вычислителя скоростей и вторым входом третьего вычислителя матрицы направляющих косинусов.
Устройство, отличающееся тем, что вычислитель погрешностей пилотажно-навигационных параметров включает первый и второй вычислители матрицы состояния, первый и второй вычислитель матрицы возмущения, первый и второй вычислители ковариационной матрицы ошибок, причем первый, второй, третий, седьмой и девятый входы вычислителя погрешностей пилотажно-навигационных параметров соединены с первым - пятым входами первого вычислителя матрицы состояния, выход которого соединен с первым входом первого вычислителя ковариационной матрицы ошибок, выход первого вычислителя матрицы возмущения соединен со вторым входом первого вычислителя ковариационной матрицы ошибок, первый, второй и третий выходы которого соединены с первым, третьим и пятым выходами вычислителя погрешностей пилотажно-навигационных параметров соответственно, четвертый, пятый, шестой, восьмой и десятый входы вычислителя погрешностей пилотажно-навигационных параметров соединены с первым - пятым входами второго вычислителя матрицы состояния, выход которого соединен с первым входом второго вычислителя ковариационной матрицы ошибок, выход второго вычислителя матрицы возмущения соединен со вторым входом второго вычислителя ковариационной матрицы ошибок, первый, второй и третий выходы которого соединены со вторым, четвертым и шестым выходами вычислителя погрешностей пилотажно-навигационных параметров соответственно.
Новыми признаками, обладающими существенными отличиями по способу является следующая совокупность действий:
- осуществляют измерение угловой скорости и ускорения неподвижным относительно корпуса БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, объединенных в дополнительный блок чувствительных элементов,
- определяют текущих значений навигационных параметров по измеренным значениям ускорения и угловых скоростей дополнительным комплектом измерителей угловой скорости и акселерометров,
- определяют ориентацию БЛА относительно навигационной системы координат по измеренным значениям угловых скоростей БЛА дополнительным комплектом измерителей угловой скорости и акселерометров,
- определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров вычисленных на основании показаний измерителей угловой скорости и акселерометров подвижного блока чувствительных элементов,
- определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров вычисленных на основании показаний измерителей угловой скорости и акселерометров дополнительного блока чувствительных элементов, неподвижного относительно корпуса БЛА,
- определяют текущее значение пилотажно-навигационных параметров БЛА как взвешенную сумму соответствующих пилотажно-навигационных параметров, вычисленных на основании показаний подвижного и неподвижного блоков чувствительных элементов;
- по устройству - наличие в схеме устройства пилотажно-навигационного вычислителя, вычислителя погрешностей пилотажно-навигационных параметров, трех блоков оценки;
- новые связи между известными и новыми признаками.
Данные существенные отличительные признаки приводят к появлению новых свойств у заявляемого изобретения, а именно: повышают точность определения пилотажно-навигационных параметров БЛА.
Краткое описание чертежей
Предполагаемое изобретение поясняется чертежами, изображенными на фигурах 1 - 3.
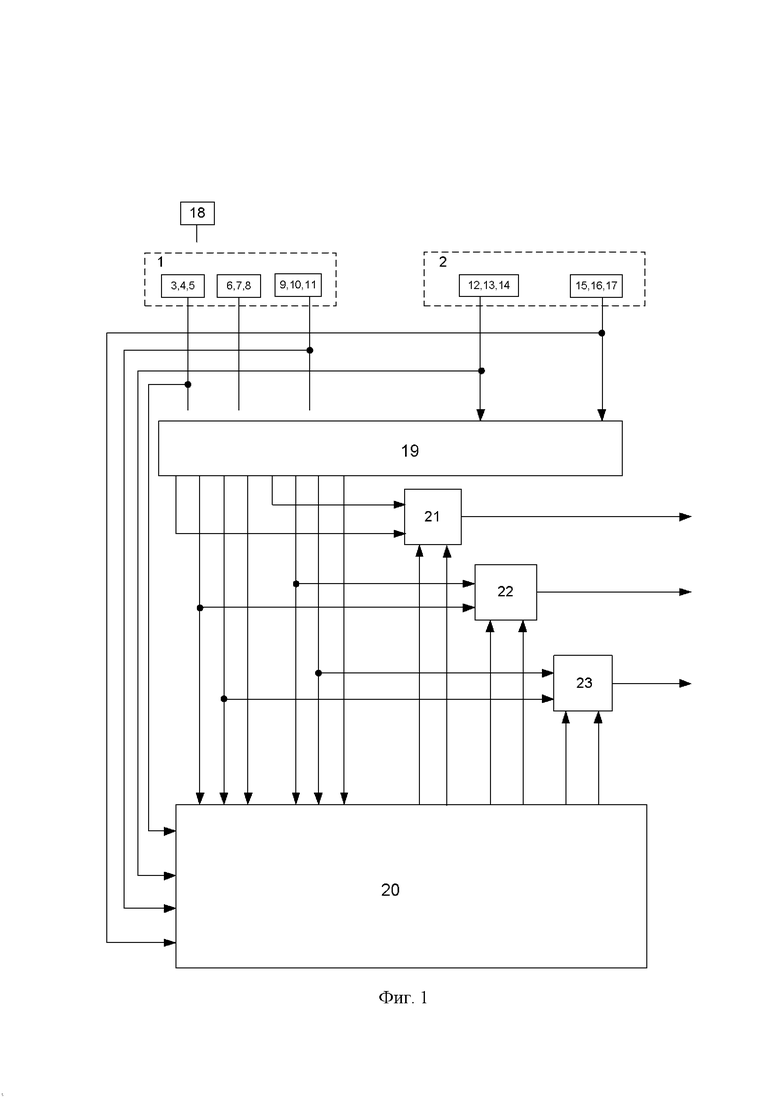
На фиг. 1 изображена блок-схема устройства для инерциальной навигации БЛА. Данное устройство состоит из следующих блоков:
1 - первый блок чувствительных элементов;
2 - второй блок чувствительных элементов;
3 - первый акселерометр;
4 - второй акселерометр;
5 - третий акселерометр;
6 - первый датчик угла;
7 - второй датчик угла;
8 - третий датчик угла;
9 - первый измеритель угловой скорости;
10 - второй измеритель угловой скорости;
11 - третий измеритель угловой скорости;
12 - четвертый акселерометр;
13 - пятый акселерометр;
14 - шестой акселерометр;
15 - четвертый измеритель угловой скорости;
16 - пятый измеритель угловой скорости;
17 - шестой измеритель угловой скорости;
18 - поворотное устройство;
19 - пилотажно-навигационный вычислитель;
20 - вычислитель погрешностей пилотажно-навигационных параметров;
21 - первый блок оценки;
22 - второй блок оценки;
23 - третий блок оценки.
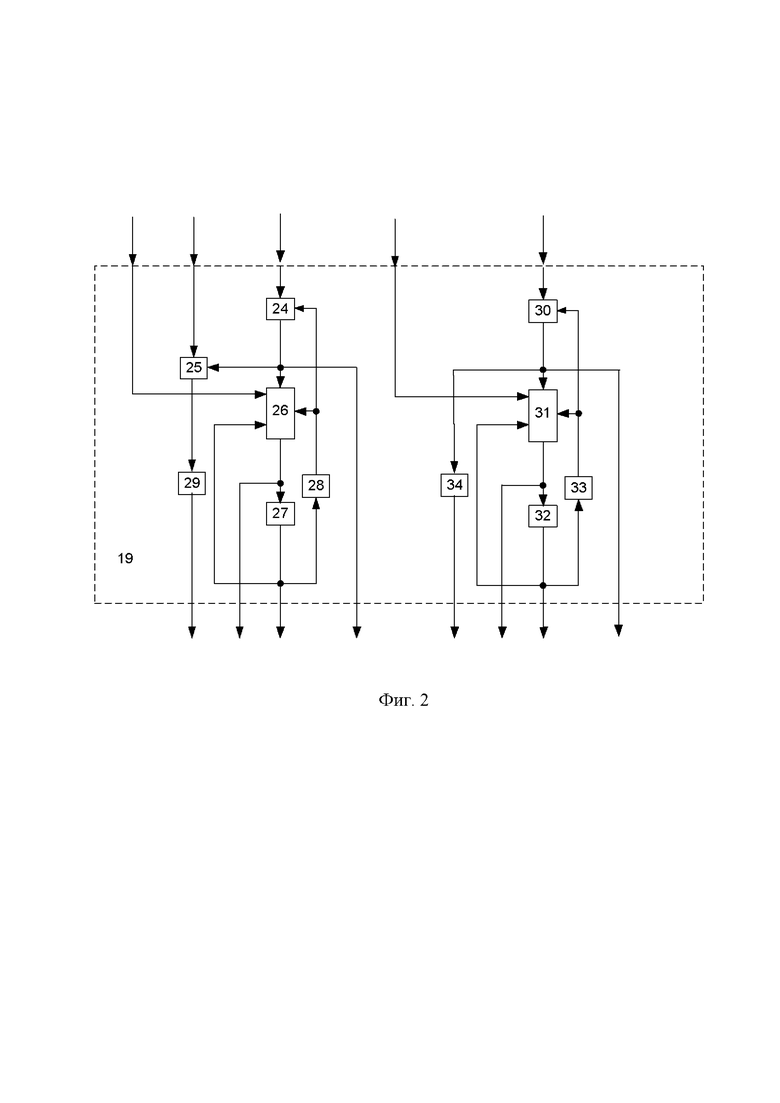
На фиг. 2 изображена блок-схема пилотажно-навигационного вычислителя, который содержит:
24 - первый вычислитель матрицы направляющих косинусов;
25 - второй вычислитель матрицы направляющих косинусов;
26 - первый вычислитель скоростей;
27 - первый вычислитель координат;
28 - первый вычислитель угловых скоростей;
29 - первый вычислитель параметров ориентации;
30 - третий вычислитель матрицы направляющих косинусов;
31 - второй вычислитель скоростей;
32 - второй вычислитель координат;
33 - второй вычислитель угловых скоростей;
34 - второй вычислитель параметров ориентации.
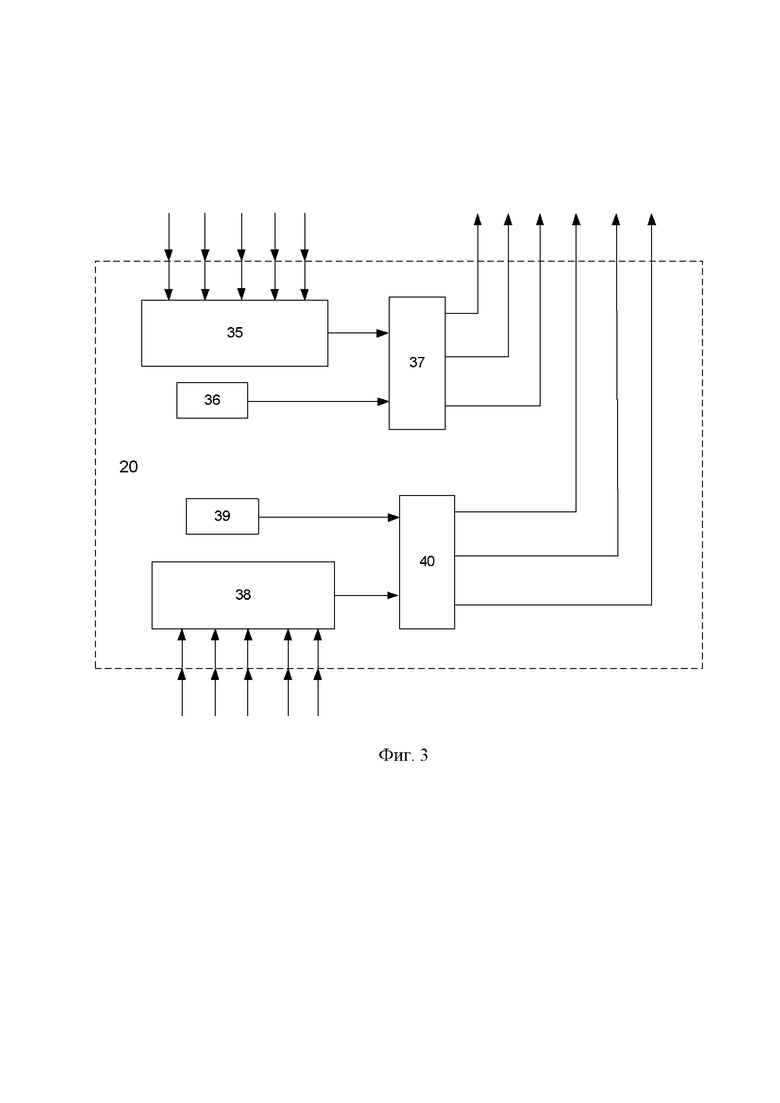
На фиг. 3 изображена блок-схема вычислителя погрешностей пилотажно-навигационных параметров, который содержит:
35 - первый вычислитель матрицы состояния;
36 - первый вычислитель матрицы возмущения;
37 - первый вычислитель ковариационной матрицы ошибок;
38 - второй вычислитель матрицы состояния;
39 - второй вычислитель матрицы возмущения;
40 - второй вычислитель ковариационной матрицы ошибок.
Описание реализации изобретения
В состав устройства входят первый и второй блок чувствительных элементов 1 и 2, первый - третий акселерометры 3 - 5 и четвертый - шестой акселерометры 12 - 14, первый - третий датчики угла 6 - 8, первый - третий измерители угловой скорости 9 - 11 и четвертый - шестой измерители угловой скорости 15 - 17, поворотное устройство 18, пилотажно-навигационный вычислитель 19, вычислитель погрешностей пилотажно-навигационных параметров 20, первый - третий блоки оценки 21 - 23. Выходы первого, второго и третьего акселерометров 3. 4, 5 соединены с первым входом пилотажно-навигационного вычислителя 19 и седьмым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Выходы первого, второго и третьего датчика угла 6, 7, 8 соединены со вторым входом пилотажно-навигационный вычислителя 19. Выходы первого, второго и третьего измерителей угловой скорости 9, 10, 11 соединены с третьим входом пилотажно-навигационного вычислителя 19 и девятым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Выходы четвертого, пятого и шестого акселерометров 12, 13, 14 соединены с четвертым входом пилотажно-навигационного вычислителя 19 и восьмым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Выходы четвертого, пятого и шестого измерителей угловой скорости 15, 16, 17 соединены с пятым входом пилотажно-навигационного вычислителя 19 и десятым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Первый и пятый выходы пилотажно-навигационного вычислителя 19 соединены соответственно с первым и вторым входами первого блока оценки 21. Второй выход пилотажно-навигационного вычислителя 19 соединен с первыми входами второго блока оценки 22 и вычислителя погрешностей пилотажно-навигационных параметров 20. Третий выход пилотажно-навигационного вычислителя 19 соединен с первым входом третьего блока оценки 23 и вторым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Четвертый выход пилотажно-навигационного вычислителя 19 соединен с третьим входом вычислителя погрешностей пилотажно-навигационных параметров 20. Шестой выход пилотажно-навигационного вычислителя 19 соединен со вторым входом второго блока оценки 22 и четвертым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Седьмой выход пилотажно-навигационного вычислителя 19 соединен со вторым входом третьего блока оценки 23 и пятым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Восьмой выход пилотажно-навигационного вычислителя 19 соединен с шестым входом вычислителя погрешностей пилотажно-навигационных параметров 20. Первый и второй выходы вычислителя погрешностей пилотажно-навигационных параметров 20 соединены соответственно с третьим и четвертым входами первого блока оценки 21. Третий и четвертый выходы вычислителя погрешностей пилотажно-навигационных параметров 20 соединены соответственно с третьим и четвертым входами второго блока оценки 22. Пятый и шестой выходы вычислителя погрешностей пилотажно-навигационных параметров 20 соединены соответственно с третьим и четвертым входами третьего блока оценки 23. Выходы первого, второго и третьего блоков оценки 21, 22, 23 являются соответственно первым, вторым и третьим выходами устройства.
Первый блок чувствительных элементов 1 состоит из первого, второго и третьего акселерометров 3, 4, 5, первого, второго и третьего датчиков угла 6, 7, 8, первого, второго, третьего измерителей угловой скорости 9, 10, 11 и закреплен на поворотном устройстве 18.
Поворотное устройство 18 известно [3] и представляют собой карданный узел, предназначенный для поворота первого блока чувствительных элементов 1 относительно связанных осей БЛА. На осях поворотного устройства 18 расположены датчики угла 6, 7 и 8, позволяющие измерить углы Эйлера-Крылова [3], определяющие ориентацию первого блока чувствительных элементов 1 относительно связанной с БЛА системы координат.
Второй блок чувствительных элементов 2 состоит из четвертого, пятого, шестого акселерометров 12, 13, 14 и четвертого, пятого, шестого измерителей угловой скорости 15, 16, 17 и закреплен на борту БЛА.
Измерители угловой скорости и акселерометры каждого из блоков чувствительных элементов 1 и 2 представляют собой ортогональные тройки измерителей.
Пилотажно-навигационный вычислитель 19 состоит из первого, второго и третьего вычислителей матрицы направляющих косинусов 24, 25, 30, первого и второго вычислителей скоростей 26 и 31, первого и второго вычислителей параметров ориентации 29 и 34, первого и второго вычислителей координат 27 и 32, первого и второго вычислителей угловых скоростей 28 и 33. Первый вход пилотажно-навигационного вычислителя 19 соединен с первым входом первого вычислителя скоростей 26. Второй вход пилотажно-навигационного вычислителя 19 соединен с первым входом второго вычислителя матрицы направляющих косинусов 25, выход которого через первый вычислитель параметров ориентации 29 соединен с первым выходом пилотажно-навигационного вычислителя 19. Третий вход пилотажно-навигационного вычислителя 19 соединен с первым входом первого вычислителя матрицы направляющих косинусов 24, выход которого соединен со вторым входом второго вычислителя матрицы направляющих косинусов 25, четвертым входом первого вычислителя скоростей 26 и четвертым выходом пилотажно-навигационного вычислителя 19. Четвертый вход пилотажно-навигационного вычислителя 19 соединен с первым входом второго вычислителя скоростей 31. Пятый вход пилотажно-навигационного вычислителя 19 соединен с первым входом третьего вычислителя матрицы направляющих косинусов 30, выход которого соединен с четвертым входом второго вычислителя скоростей 31, восьмым выходом пилотажно-навигационного вычислителя 19 и через второй вычислитель параметров ориентации 34 соединен с пятым выходом пилотажно-навигационного вычислителя 19. Выход первого вычислителя скоростей 26 соединен с входом первого вычислителя координат 27 и со вторым выходом пилотажно-навигационного вычислителя 19. Выход первого вычислителя координат 27 соединен со вторым входом первого вычислителя скоростей 26, с третьим выходом пилотажно-навигационного вычислителя 19 и с входом первого вычислителя угловых скоростей 28, выход которого соединен с третьим входом первого вычислителя скоростей 26 и вторым входом первого вычислителя матрицы направляющих косинусов 24. Выход второго вычислителя скоростей 31 соединен с входом второго вычислителя координат 32 и шестым выходом пилотажно-навигационного вычислителя 19. Выход второго вычислителя координат 32 соединен со вторым входом второго вычислителя скоростей 31, входом второго вычислителя угловых скоростей 33 и седьмым выходом пилотажно-навигационного вычислителя 19. Выход второго вычислителя угловых скоростей 33 соединен с третьим входом второго вычислителя скоростей 31 и вторым входом третьего вычислителя матрицы направляющих косинусов 30.
Пилотажно-навигационный вычислитель 19 предназначен для вычисления пилотажно-навигационных параметров БЛА на основании показаний акселерометров и измерителей угловой скорости.
Вычислитель погрешностей пилотажно-навигационных параметров 20 включает первый и второй вычислители матрицы состояния 35 и 38, первый и второй вычислитель матрицы возмущения 36 и 39, первый и второй вычислители ковариационной матрицы ошибок 37 и 40. Первый, второй, третий, седьмой и девятый входы вычислителя погрешностей пилотажно-навигационных параметров 20 соединены с первым - пятым входами первого вычислителя матрицы состояния 35, выход которого соединен с первым входом первого вычислителя ковариационной матрицы ошибок 37. Выход первого вычислителя матрицы возмущения 36 соединен со вторым входом первого вычислителя ковариационной матрицы ошибок 37 первый, второй и третий выходы которого соединены с первым, третьим и пятым выходами вычислителя ковариационной матрицы ошибок 20 соответственно. Четвертый, пятый, шестой, восьмой и десятый входы вычислителя погрешностей пилотажно-навигационных параметров 20 соединены с первым - пятым входами второго вычислителя матрицы состояния 38, выход которого соединен с первым входом второго вычислителя ковариационной матрицы ошибок 40. Выход второго вычислителя матрицы возмущения 39 соединен со вторым входом второго вычислителя ковариационной матрицы ошибок 40, первый, второй и третий выходы которого соединены со вторым, четвертым и шестым выходами вычислителя ковариационной матрицы ошибок 20 соответственно.
Первый, второй и третий блоки оценки 21, 22, 23 представляют собой вычислительные устройства, осуществляющие взвешенную аддитивную оценку пилотажно-навигационных параметров БЛА.
Выходы первого блока оценки 21 несут информацию об углах ориентации БЛА, а именно о тангаже ϑ, крене γ и курсе ψ.
Выходы второго блока оценки 22 несут информацию о земных скоростях VX, VY и VZ БЛА.
Выходы третьего блока оценки 23 несут информацию о широте ϕ, долготе λ, высоте 
Сущность способа инерциальной навигации БЛА заключается в следующем.
Измерители угловой скорости и акселерометры каждого из блоков чувствительных элементов 1 и 2 определяют соответствующие параметры, а именно проекции угловой скорости и ускорения на соответствующие оси чувствительности.
Показания первого, второго и третьего акселерометров 3, 4 и 5 в векторно-матричной форме:

где  - показания соответственно первого, второго и третьего акселерометров 3, 4 и 5;
- показания соответственно первого, второго и третьего акселерометров 3, 4 и 5;
 - ортогональная система координат, связанная с первым блоком чувствительных элементов 1.
- ортогональная система координат, связанная с первым блоком чувствительных элементов 1.
Показания первого, второго и третьего измерителей угловой скорости 9, 10 и 11 в векторно-матричной форме:

где  - проекции абсолютной угловой скорости системы координат, связанной с первым блоком чувствительных элементов 1 (показания соответственно первого, второго и третьего измерителей угловой скорости 9, 10 и 11).
- проекции абсолютной угловой скорости системы координат, связанной с первым блоком чувствительных элементов 1 (показания соответственно первого, второго и третьего измерителей угловой скорости 9, 10 и 11).
Показания четвертого, пятого и шестого акселерометров 12, 13 и 14 в векторно-матричной форме:

где  - показания соответственно четвертого, пятого и шестого акселерометров 12, 13 и 14;
- показания соответственно четвертого, пятого и шестого акселерометров 12, 13 и 14;
 - ортогональная система координат связанная со вторым блоком чувствительных элементов 2.
- ортогональная система координат связанная со вторым блоком чувствительных элементов 2.
Показания четвертого, пятого и шестого измерителей угловой скорости 15, 16 и 17 в векторно-матричной форме:

где  - проекции абсолютной угловой скорости системы координат, связанной со вторым блоком чувствительных элементов 2 (показания соответственно четвертого, пятого и шестого измерителей угловой скорости 15, 16 и 17).
- проекции абсолютной угловой скорости системы координат, связанной со вторым блоком чувствительных элементов 2 (показания соответственно четвертого, пятого и шестого измерителей угловой скорости 15, 16 и 17).
По сигналам, поступающим с первого, второго и третьего измерителей угловой скорости 9, 10 и 11 первого блока чувствительных элементов 1 в первом вычислителе матрицы направляющих косинусов (МНК) 24 вычисляется матрица направляющих косинусов перехода из системы координат, связанной с первым блоком чувствительных элементов 1, к навигационной системе координат:

где 
 - кососимметрическая матрица, составленная из проекций абсолютной угловой скорости системы координат, связанной с первым блоком чувствительных элементов 1, на собственные оси (показания измерителей угловой скорости 9, 10, 11);
- кососимметрическая матрица, составленная из проекций абсолютной угловой скорости системы координат, связанной с первым блоком чувствительных элементов 1, на собственные оси (показания измерителей угловой скорости 9, 10, 11);
 - кососимметрическая матрица, составленная из проекций абсолютной угловой скорости навигационной системы координат, на собственные оси.
- кососимметрическая матрица, составленная из проекций абсолютной угловой скорости навигационной системы координат, на собственные оси.
Соотношение (5) представляет собой обобщенное уравнение Пуассона и определяет ориентацию одной подвижной системы координат относительно другой подвижной системы координат [4].
Ориентация БЛА определяется на основании информации о:
а) ориентации первого блока чувствительных элементов 1 относительно навигационной системы координат;
б) ориентации первого блока чувствительных элементов 1 относительно корпуса БЛА.
Ориентация первого блока чувствительных элементов 1 относительно навигационной системы координат определяется МНК A1 и вычисляются в блоке 24 на основании соотношения (5).
Ориентация первого блока чувствительных элементов 1 относительно корпуса БЛА измеряется датчиками углов 6, 7, 8.
По сигналам, поступающим с датчиков углов 6, 7 и 8 в блоке 25 вычисляются элементы МНК перехода из системы координат связанной с первым блоком чувствительных элементов 1 с БЛА системе координат:
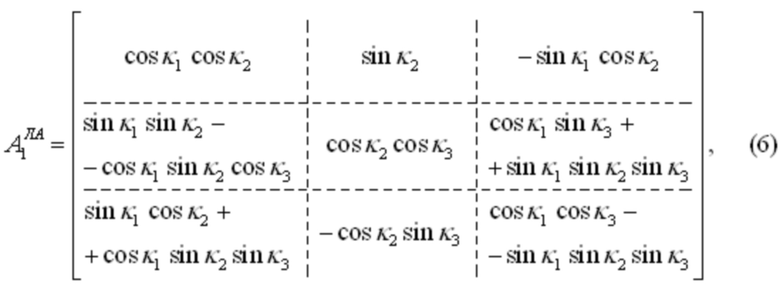
где  - углы поворота первого блока чувствительных элементов относительно корпуса БЛА.
- углы поворота первого блока чувствительных элементов относительно корпуса БЛА.
Для определения углов ориентации БЛА необходимо определить МНК перехода от связанной с БЛА системы координат к навигационной системе координат:

где Т - знак транспонирования матрицы.
По элементам  матрицы D в блоке 29 вычисляются углы ориентации БЛА - курс ψ, крен γ, тангаж ϑ:
матрицы D в блоке 29 вычисляются углы ориентации БЛА - курс ψ, крен γ, тангаж ϑ:


Информация об углах ориентации БЛА по ступает на первый выход пилотажно-навигационного вычислителя 19.
По сигналам, поступающим с акселерометров 3, 4, 5 в первом вычислителе скоростей 26 определяются составляющие земной скорости:
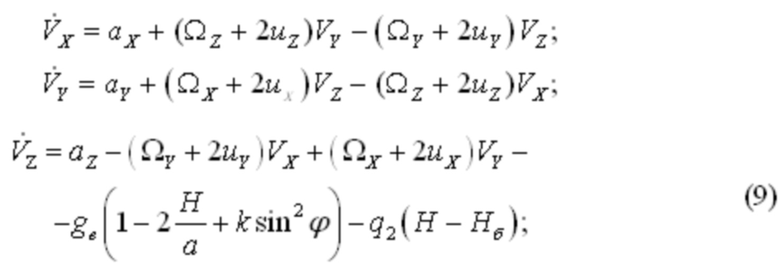
где  - составляющие относительной угловой скорости навигационной системы координат;
- составляющие относительной угловой скорости навигационной системы координат;
 - проекции угловой скорости Земли на оси навигационной системы координат;
- проекции угловой скорости Земли на оси навигационной системы координат;
 - барометрическая высота;
- барометрическая высота;
 - большая полуось земного эллипсоида;
- большая полуось земного эллипсоида;
 - ускорение силы тяжести на экваторе;
- ускорение силы тяжести на экваторе;
 - коэффициент обратной связи, обеспечивающий устойчивость канала вертикальной скорости по ошибкам;
- коэффициент обратной связи, обеспечивающий устойчивость канала вертикальной скорости по ошибкам;
k - коэффициент, характеризующий изменение силы тяжести в зависимости от широты.
По сигналам, поступающим с первого вычислителя скоростей 26 в первом вычислителе координат 27 определяются географические координаты местоположения БЛА:

где ϕ, λ - соответственно географическая широта и долгота местоположения БЛА;
ε - азимутальный угол;
 - радиус кривизны сечения эллипсоида меридиональной плоскостью;
- радиус кривизны сечения эллипсоида меридиональной плоскостью;
 - радиус кривизны сечения эллипсоида плоскостью, приходящей через геодезическую вертикаль места и ортогональную меридиану (радиус кривизны первого вертикала).
- радиус кривизны сечения эллипсоида плоскостью, приходящей через геодезическую вертикаль места и ортогональную меридиану (радиус кривизны первого вертикала).
В первом вычислителе угловых скоростей 28 определяются проекции относительных, переносных и абсолютных угловых скоростей навигационной системы координат на собственные оси:
На первом-четвертом выходах пилотажно-навигационного вычислителя 19 формируются данные о пилотажно-навигационных параметрах на основании ускорения и угловой скорости БЛА, поступающих с первого блока чувствительных элементов 1 - пилотажно-навигационные параметры инерциально-навигационной системы с управляемым блоком чувствительных элементов (УИНС).
Аналогично по сигналам об ускорениях и угловых скоростях, поступающих со второго блока чувствительных элементов 2 вычисляются пилотажно-навигационные параметры БЛА - пилотажно-навигационные параметры бесплатформенной инерциально-навигационной системы (БИНС).
В третьем вычислителе матрицы направляющих косинусов 30, на основании соотношений, аналогичных соотношениям (5), определяется МНК перехода из системы координат связанной с БЛА к навигационной системе координат.
Во втором вычислителе параметров ориентации 34 на основании соотношений, аналогичных соотношениям (8), определяются углы ориентации БЛА, которые поступают на пятый выход пилотажно-навигационного вычислителя 19.
Во втором вычислителе скоростей 31 на основании соотношений, аналогичных соотношениям (9), вычисляются земные скорости БЛА, которые поступают на шестой выход пилотажно-навигационного вычислителя 19.
Во втором вычислителе координат 32 на основании соотношений, аналогичных соотношениям (10), вычисляются координаты БЛА, которые поступают на седьмой выход пилотажно-навигационного вычислителя 19.
Во втором вычислителе угловых скоростей 33 на основании соотношений, аналогичных соотношениям (11), определяются относительные, переносные и абсолютные угловые скорости навигационной системы координат.
Таким образом, на первом и пятом, втором и шестом, третьем и седьмом выходах пилотажно-навигационного вычислителя формируется однотипные данные о соответственно углах ориентации, скоростях и координатах БЛА.
Однотипные данные имеют различную точность. Это обусловлено тем, что первый блок чувствительных элементов 1 вращается в пространстве для обеспечения автономной компенсации погрешностей, а второй блок чувствительных элементов 2 неподвижен относительно корпуса БЛА.
Однотипные данные поступают на соответствующие блоки оценки, где осуществляется аддитивная взвешенная оценка пилотажно-навигационных параметров. Оценка осуществляется, на основании точностных характеристик, а именно дисперсий ошибок определения пилотажно-навигационных параметров.
Дисперсии ошибок определения пилотажно-навигационных параметров вычисляются в вычислителе погрешностей пилотажно-навигационных параметров 20.
Матричное дифференциальное уравнение, характеризующее динамику изменения ошибок, вычисленных по информации первого блока чувствительных элементов 1, с течением времени автономной работы, представим в следующем виде [5]:

где: P1 - ковариационная матрица ошибок УИНС;
F1 - матрица состояния ошибок УИНС;
G1 - матрица возмущений УИНС.
Матричное дифференциальное уравнение, характеризующее динамику изменения ошибок, вычисленных по информации второго блока чувствительных элементов 2, с течением времени автономной работы, представим в следующем виде [5]:

где: P2 - ковариационная матрица ошибок БИНС;
F2 - матрица состояния ошибок БИНС;
G2 - матрица возмущений БИНС.
Элементы матриц F1 и F2 получаются из уравнений функционирования систем путем варьирования соответствующих идеальных соотношений. Полученные таким образом соотношения в вариациях представляют собой линейные уравнения первого приближения относительно входных возмущений системы.
Элементы матриц F1 вычисляются в первом вычислителе матрицы состояния 35 вычислителя погрешностей пилотажно-навигационных параметров 20.
Элементы матриц F2 вычисляются во втором вычислителе матрицы состояния 38 вычислителя погрешностей пилотажно-навигационных параметров 20.
Элементы матриц G1 и G2 определяются интенсивностью возмущающих воздействий измерителей угловой скорости и акселерометров.
Элементы матриц G1 вычисляются в первом вычислителе матрицы возмущения 36 вычислителя погрешностей пилотажно-навигационных параметров 20.
Элементы матриц G2 вычисляются во втором вычислителе матрицы возмущения 39 вычислителя погрешностей пилотажно-навигационных параметров 20.
В первом вычислителе ковариационной матрицы ошибок 37, на основании соотношения (12), вычисляется ковариационная матрица ошибок УИНС P1. Диагональные элементы данной матрицы представляют собой дисперсии ошибок определения пилотажно-навигационных параметров УИНС. Данная информация является выходной для первого вычислителя ковариационной матрицы ошибок 37 и соответственно вычислителя погрешностей пилотажно-навигационных параметров 20.
Во втором вычислителе ковариационной матрицы ошибок 40, на основании соотношения 13, вычисляется ковариационная матрица ошибок БИНС P2. Диагональные элементы данной матрицы представляют собой дисперсии ошибок определения пилотажно-навигационных параметров БИНС. Данная информация является выходной для второго вычислителя ковариационной матрицы ошибок 40 и соответственно вычислителя погрешностей пилотажно-навигационных параметров 20.
Информация о дисперсиях ошибок определения пилотажно-навигационных параметров используется в блоках оценки 21, 22 и 23 для определения пилотажно-навигационных параметров.
В первый блок оценки 21 из пилотажно-навигационного вычислителя 19 поступает дублированная информация об ориентации БЛА на основании информации с первого блока чувствительных элементов 1 второго блока чувствительных элементов 2.
На первый вход первого блока оценки 21 с первого выхода пилотажно-навигационного вычислителя 19 поступают сигналы о курсе ψ1, крене γ1, тангаже ϑ1, определенные по сигналам первого блока чувствительных элементов 1.
На второй вход первого блока оценки 21 с пятого выхода пилотажно-навигационного вычислителя 19 поступают сигналы о курсе ψ2, крене γ2, тангаже ϑ2, определенные по сигналам второго блока чувствительных элементов 2.
Точностные сигналы однотипных сигналов различны и меняются с течением времени. Это обусловлено тем, что ошибки УИНС обусловлены в основном воздействием динамических погрешностей чувствительных элементов, возникающих при дополнительном вращении блока чувствительных элементов. К динамическим погрешностям чувствительных элементов относятся перекосы осей чувствительности измерителей угловой скорости 9, 10, 11 и ошибки масштабного коэффициента измерителей угловой скорости 9, 10, 11. Перекосы осей чувствительности измерителей угловой скорости 9, 10, 11 приводят к повышению ошибки определения пилотажно-навигационных параметров на начальном этапе функционирования системы. Ошибки определения координат, обусловленные погрешностью масштабных коэффициентов измерителей угловой скорости 9, 10, 11 (в первую очередь азимутального гироскопа), пропорциональны квадрату времени функционирования системы и сильно сказываются при длительном функционировании системы [5]. Ошибки БИНС обусловлены в основном воздействием постоянных и медленноменяющихся погрешностей чувствительных элементов.
Информация о дисперсиях ошибок определения курса ψ1, крена γ1 и тангажа 
В первом блоке оценки 21 осуществляется взвешенное усреднение однотипных показаний, что приводит к увеличению точности оценки по сравнению с точностью измерений первичных измерительных преобразователей [6]:
где  - дисперсия ошибки определения курса, тангажа и крена на основании показаний акселерометров и измерителей угловой скорости первого блока чувствительных элементов 1;
- дисперсия ошибки определения курса, тангажа и крена на основании показаний акселерометров и измерителей угловой скорости первого блока чувствительных элементов 1;
 - дисперсия ошибки определения курса, тангажа и крена на основании показаний акселерометров и измерителей угловой скорости второго блока чувствительных элементов 2.
- дисперсия ошибки определения курса, тангажа и крена на основании показаний акселерометров и измерителей угловой скорости второго блока чувствительных элементов 2.
Во втором блоке оценки 22 на основании соотношений аналогичных соотношениям (14) вычисляются составляющие земной скорости БЛА.
В третьем блоке оценки 23 на основании соотношений аналогичных соотношениям (14) вычисляются координаты и высота БЛА.
Пилотажно-навигационная информация с выходов устройства поступает в системы БЛА.
Технический эффект
Проведенный анализ способов-аналогов, в том числе ближайшего, показал следующее, что их недостатком является недостаточная точность автономного счисления навигационных параметров, как на начальном этапе функционирования инерциальной навигационной системы, так и при ее длительном функционировании. Это обусловлено воздействием динамических погрешностей чувствительных элементов, возникающих при дополнительном вращении блока чувствительных элементов. Причинами этих динамических погрешностей являются перекосы осей чувствительности измерителей угловой скорости и ошибки масштабного коэффициента измерителей угловой скорости. Перекосы осей чувствительности измерителей угловой скорости приводят к повышению ошибки определения пилотажно-навигационных параметров на начальном этапе функционирования инерциальной навигационной системы. Тогда как ошибки определения координат, обусловленные погрешностью масштабных коэффициентов измерителей угловой скорости (в первую очередь азимутального гироскопа), пропорциональны квадрату времени функционирования системы и сильно сказываются при длительном функционировании инерциальной навигационной системы.
Заявляемый способ и устройство, его осуществляющее, имеют новые существенные признаки, а именно: дополнительно измеряют угловую скорость и ускорение неподвижным относительно корпуса БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, объединенных в дополнительный блок чувствительных элементов; определяют текущих значений навигационных параметров по измеренным значениям ускорения и угловых скоростей дополнительным комплектом измерителей угловой скорости и акселерометров; определяют ориентацию БЛА относительно навигационной системы координат по измеренным значениям угловых скоростей БЛА дополнительным комплектом измерителей угловой скорости и акселерометров; определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров вычисленных на основании показаний измерителей угловой скорости и акселерометров подвижного блока чувствительных элементов; определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров вычисленных на основании показаний измерителей угловой скорости и акселерометров дополнительного блока чувствительных элементов, неподвижного относительно корпуса БЛА; определяют текущее значение пилотажно-навигационных параметров БЛА как взвешенную сумму соответствующих пилотажно-навигационных параметров, вычисленных на основании показаний подвижного и неподвижного блоков чувствительных элементов; в устройство вводят пилотажно-навигационного вычислитель, вычислитель погрешностей пилотажно-навигационных параметров, три блока оценок, а также новые связи между известными и новыми блоками.
Наличие в заявляемом способе и устройстве, его осуществляющем, новых существенных признаков, введенных неочевидным образом путем нового технического решения, привело объединению инерциальной навигационной системы с автокомпенсацией погрешностей и бесплатформенной инерциальной навигационной системы (БИНС), что позволит определять точностные характеристики такой систем навигации на различных временных интервалах, и осуществлять комплексную оценку пилотажно-навигационных параметров БЛА на основании данных от этих двух систем. Тем самым компенсировать динамические погрешности чувствительных элементов (измерителей угловой скорости и акселерометров) и, следовательно, повысить точность определения пилотажно-навигационных параметров полета БЛА.
Источники информации
1. Патент РФ №2362977 С1, кл. G01C21/10. Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления. 27.07.2009 (аналог).
2. Патент РФ №2313067 С2, кл. G01C 21/12. Способ определения навигационных параметров летательного аппарата и устройство для его осуществления. 27.12.2005 (прототип).
3. Гироскопические системы. Гироскопические приборы и системы / Под ред. Д.С. Пельпора. - М.: Высш. шк., 1988. с. 367.
4. Шепеть И.П., Онуфриенко В.В., Слесаренок С.В. Методическое обеспечение управляемых навигационных систем. (Монография). - Воронеж: Военный учебно-научный центр Военно-Воздушных Сил «Военно-Воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина», 2012. - с. 54-60.
5. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. - М.: Машиностроение, 1982.
6. Агеев В.М., Павлов Н.В. Приборные комплексы летательных аппаратов и их проектирование. - М.: Машиностроение, 1990. - с. 122-127.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например беспилотного летательного аппарата (БЛА). Для достижения поставленной цели определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров и определяют значение пилотажно-навигационных параметров БЛА как взвешенную сумму соответствующих пилотажно-навигационных параметров, вычисленных на основании показаний подвижного и неподвижного блоков чувствительных элементов. Устройство является инерциальной навигационной мультисистемой, содержащей два блока чувствительных элементов, пилотажно-навигационный вычислитель, вычислитель погрешностей пилотажно-навигационных параметров и три блока оценки. Технический результат изобретения - повышение точности определения пилотажных и навигационных параметров полета летательного аппарата. 2 н. и 2 з.п. ф-лы, 3 ил.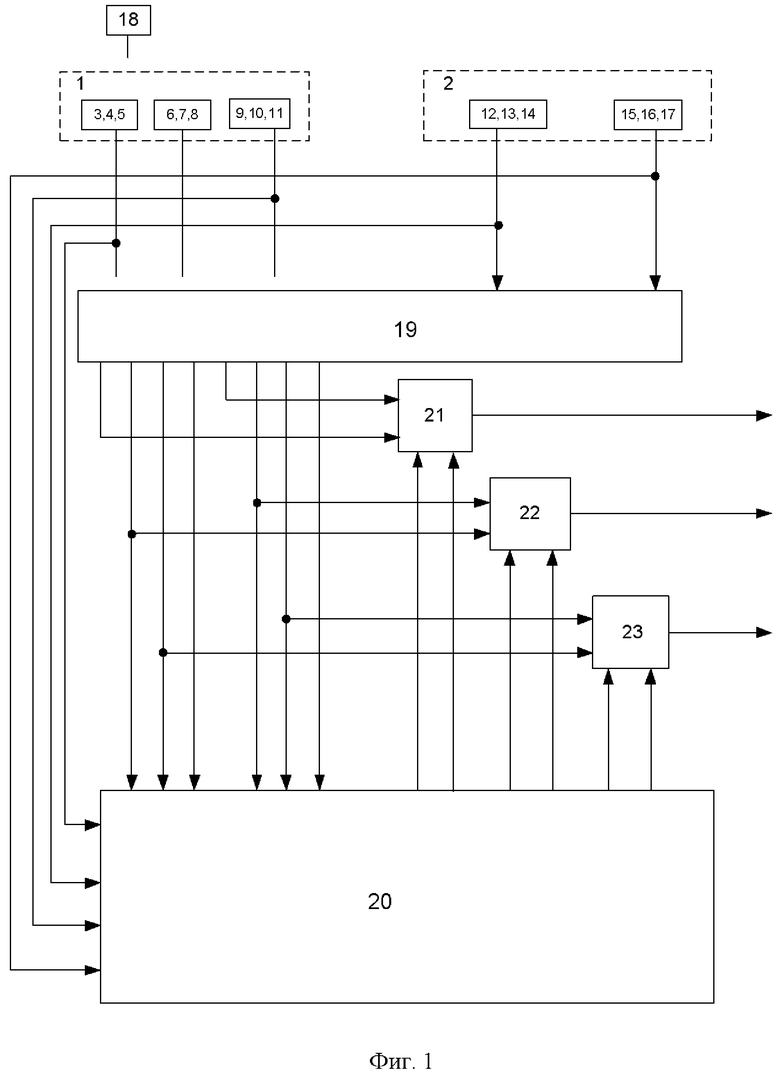
1. Способ инерциальной навигации беспилотного летательного аппарата (БЛА), заключающийся в измерении угловой скорости и ускорения БЛА комплектом измерителей угловой скорости и акселерометров, объединенных в блок чувствительных элементов, в автономной компенсации погрешностей измерителей угловой скорости и акселерометров путем принудительного вращения блока чувствительных элементов, в определении текущей ориентации измерительной системы координат относительно навигационной системы координат, в измерении углов ориентации измерительной системы координат относительно системы координат, связанной с БЛА, в определении текущих значений навигационных параметров по измеренным значениям ускорения и угловых скоростей, определении текущей ориентации БЛА по измеренным значениям угловых скоростей и ориентации измерительной системы координат относительно системы координат, связанной с БЛА, отличающийся тем, что осуществляют измерение угловой скорости и ускорения неподвижным относительно корпуса БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, объединенных в дополнительный блок чувствительных элементов, определяют текущие значения навигационных параметров по измеренным значениям ускорения и угловых скоростей дополнительным комплектом измерителей угловой скорости и акселерометров, определяют ориентацию БЛА относительно навигационной системы координат по измеренным значениям угловых скоростей БЛА дополнительным комплектом измерителей угловой скорости и акселерометров, определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров, вычисленных на основании показаний измерителей угловой скорости и акселерометров подвижного блока чувствительных элементов, определяют текущее значение дисперсии ошибок определения пилотажно-навигационных параметров, вычисленных на основании показаний измерителей угловой скорости и акселерометров дополнительного блока чувствительных элементов, неподвижного относительно корпуса БЛА, определяют текущее значение пилотажно-навигационных параметров БЛА как взвешенную сумму соответствующих пилотажно-навигационных параметров, вычисленных на основании показаний подвижного и неподвижного блоков чувствительных элементов.
2. Устройство для инерциальной навигации БЛА, включающее первый, второй, третий, четвертый, пятый и шестой акселерометры, первый, второй и третий датчики угла, первый, второй, третий, четвертый, пятый и шестой измерители угловой скорости, поворотное устройство, при этом первый, второй, третий акселерометры, первый, второй, третий датчики угла, первый, второй, третий измерители угловой скорости объединены в первый блок чувствительных элементов, который закреплен на поворотном устройстве, четвертый, пятый, шестой акселерометры, четвертый, пятый, шестой измерители угловой скорости объединены во второй блок чувствительных элементов, отличающееся тем, что в него дополнительно введены пилотажно-навигационный вычислитель, вычислитель погрешностей пилотажно-навигационных параметров, первый, второй и третий блоки оценки, при этом выходы первого, второго и третьего акселерометров соединены с первым входом пилотажно-навигационного вычислителя и седьмым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы первого, второго и третьего датчика угла соединены со вторым входом пилотажно-навигационный вычислителя, выходы первого, второго и третьего измерителей угловой скорости соединены с третьим входом пилотажно-навигационного вычислителя и девятым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы четвертого, пятого и шестого акселерометров соединены с четвертым входом пилотажно-навигационного вычислителя и восьмым входом вычислителя погрешностей пилотажно-навигационных параметров, выходы четвертого, пятого и шестого измерителей угловой скорости соединены с пятым входом пилотажно-навигационного вычислителя и десятым входом вычислителя погрешностей пилотажно-навигационных параметров, первый и пятый выходы пилотажно-навигационного вычислителя соединены соответственно с первым и вторым входами первого блока оценки, второй выход пилотажно-навигационного вычислителя соединен с первыми входами второго блока оценки и вычислителя погрешностей пилотажно-навигационных параметров, третий выход пилотажно-навигационного вычислителя соединен с первым входом третьего блока оценки и вторым входом вычислителя погрешностей пилотажно-навигационных параметров, четвертый выход пилотажно-навигационного вычислителя соединен с третьим входом вычислителя погрешностей пилотажно-навигационных параметров, шестой выход пилотажно-навигационного вычислителя соединен со вторым входом второго блока оценки и четвертым входом вычислителя погрешностей пилотажно-навигационных параметров, седьмой выход пилотажно-навигационного вычислителя соединен со вторым входом третьего блока оценки и пятым входом вычислителя погрешностей пилотажно-навигационных параметров, восьмой выход пилотажно-навигационного вычислителя соединен с шестым входом вычислителя погрешностей пилотажно-навигационных параметров, первый и второй выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами первого блока оценки, третий и четвертый выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами второго блока оценки, пятый и шестой выходы вычислителя погрешностей пилотажно-навигационных параметров соединены соответственно с третьим и четвертым входами третьего блока оценки, выходы первого, второго и третьего блоков оценки являются соответственно первым, вторым и третьим выходами устройства.
3. Устройство по п. 2, отличающееся тем, что пилотажно-навигационный вычислитель включает первый, второй и третий вычислители матрицы направляющих косинусов, первый и второй вычислители скоростей, первый и второй вычислители параметров ориентации, первый и второй вычислители координат, первый и второй вычислители угловых скоростей, причем первый вход пилотажно-навигационного вычислителя соединен с первым входом первого вычислителя скоростей, второй вход пилотажно-навигационного вычислителя соединен с первым входом второго вычислителя матрицы направляющих косинусов, выход которого через первый вычислитель параметров ориентации соединен с первым выходом пилотажно-навигационного вычислителя, третий вход пилотажно-навигационного вычислителя соединен с первым входом первого вычислителя матрицы направляющих косинусов, выход которого соединен со вторым входом второго вычислителя матрицы направляющих косинусов, четвертым входом первого вычислителя скоростей и четвертым выходом пилотажно-навигационного вычислителя, четвертый вход пилотажно-навигационного вычислителя соединен с первым входом второго вычислителя скоростей, пятый вход пилотажно-навигационного вычислителя соединен с первым входом третьего вычислителя матрицы направляющих косинусов, выход которого соединен с четвертым входом второго вычислителя скоростей, восьмым выходом пилотажно-навигационного вычислителя и через второй вычислитель параметров ориентации соединен с пятым выходом пилотажно-навигационного вычислителя, выход первого вычислителя скоростей соединен с входом первого вычислителя координат и со вторым выходом пилотажно-навигационного вычислителя, выход первого вычислителя координат соединен со вторым входом первого вычислителя скоростей, с третьим выходом пилотажно-навигационного вычислителя и с входом первого вычислителя угловых скоростей, выход которого соединен с третьим входом первого вычислителя скоростей и вторым входом первого вычислителя матрицы направляющих косинусов, выход второго вычислителя скоростей соединен с входом второго вычислителя координат и шестым выходом пилотажно-навигационного вычислителя, выход второго вычислителя координат соединен со вторым входом второго вычислителя скоростей, входом второго вычислителя угловых скоростей и седьмым выходом пилотажно-навигационного вычислителя, выход второго вычислителя угловых скоростей соединен с третьим входом второго вычислителя скоростей и вторым входом третьего вычислителя матрицы направляющих косинусов.
4. Устройство по п. 2, отличающееся тем, что вычислитель погрешностей пилотажно-навигационных параметров включает первый и второй вычислители матрицы состояния, первый и второй вычислители матрицы возмущения, первый и второй вычислители ковариационной матрицы ошибок, причем первый, второй, третий, седьмой и девятый входы вычислителя погрешностей пилотажно-навигационных параметров соединены с первым - пятым входами первого вычислителя матрицы состояния, выход которого соединен с первым входом первого вычислителя ковариационной матрицы ошибок, выход первого вычислителя матрицы возмущения соединен со вторым входом первого вычислителя ковариационной матрицы ошибок, первый, второй и третий выходы которого соединены с первым, третьим и пятым выходами вычислителя погрешностей пилотажно-навигационных параметров соответственно, четвертый, пятый, шестой, восьмой и десятый входы вычислителя погрешностей пилотажно-навигационных параметров соединены с первым - пятым входами второго вычислителя матрицы состояния, выход которого соединен с первым входом второго вычислителя ковариационной матрицы ошибок, выход второго вычислителя матрицы возмущения соединен со вторым входом второго вычислителя ковариационной матрицы ошибок, первый, второй и третий выходы которого соединены со вторым, четвертым и шестым выходами вычислителя погрешностей пилотажно-навигационных параметров соответственно.
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

