Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например, летательного аппарата (ЛА).
Известен способ компенсации погрешностей гироскопов и акселерометров в автономном режиме функционирования, заключающийся во вращении инерциального измерительного блока с целью уменьшения влияния инструментальных погрешностей лазерных гироскопов [1].
Известно устройство, реализующее данный способ, включающее блок лазерных гироскопов, блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсов, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой и цифро-аналоговый преобразователи [1].
Недостатком известных способа и устройства является отсутствие возможности осуществлять учет статистических характеристик погрешностей установки осей гироскопов при определении параметров закона вращения инерциального измерительного блока, что приводит к снижению потенциальной точности бесплатформенной инерциальной навигационной системы (БИНС).
Наиболее близкими к изобретению являются способ автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающийся во вращении инерциального измерительного блока, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, коррекции параметров закона управления инерциальным измерительным блоком на основании функциональной зависимости между оптимальными параметрами закона управления и данными об изменении, в процессе эксплуатации, инструментальных погрешностей лазерных гироскопов, уточнении закона управления инерциальным измерительным блоком с учетом статистических характеристик погрешностей акселерометров. А также устройство для компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, реализующее данный способ, включающее инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока и интерфейсы, цифровой микропроцессор, блок сопряжения с навигационной информацией, блок вычисления скоростей, блок управления и отображения информации, аналого-цифровой преобразователь и цифроаналоговый преобразователь, шину навигационной информации, блок-задатчик погрешностей акселерометров, блок определения закона управления, блок коррекции, в состав которого входят, счетчик времени, блок определения погрешностей лазерных гироскопов, блок выдачи сигнала коррекции, блок выдачи параметров закона управления [2].
Недостатком данных способа и устройства является снижение точности определения пилотажно-навигационных параметров летательного аппарата с течением времени из-за погрешностей установки осей чувствительности гироскопов и отсутствия возможности осуществлять учет статистических характеристик погрешностей установки осей гироскопов при определении параметров закона вращения инерциального измерительного блока.
Техническим результатом изобретения является повышение точности определения пилотажных и навигационных параметров полета летательного аппарата за счет изменения параметров закона управления инерциального измерительного блока (ИИБ) в зависимости от статистических характеристик погрешностей установки осей чувствительности гироскопов.
Технический результат предлагаемого способа достигается тем, что в способе автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающемся во вращении инерциального измерительного блока, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, получении информации об угловой скорости и ускорении летательного аппарата в блоках лазерных гироскопах и акселерометров, передаче данных об угловой скорости и ускорении летательного аппарата в цифровой микропроцессор, в котором вычисляются углы ориентации летательного аппарата и его координаты, уточнении закона управления инерциальным измерительным блоком с учетом статистических характеристик погрешностей гироскопов и акселерометров, с целью учета погрешностей установки осей чувствительности гироскопов на основе данных о параметрах установки гироскопов и конструкции инерциального измерительного блока, поступающих из блока электроники в блок определения параметров перекоса осей чувствительности гироскопов дополнительно формируют значения флуктуационной составляющей перекоса оси чувствительности гироскопа и времени корреляции соответствующего случайного процесса, которые передаются в блок управления механизмом вращения, где на основании дисперсии флуктуационной составляющей ошибки акселерометров и времени корреляции случайного процесса ошибки акселерометров, дисперсии флуктуационной составляющей дрейфа гироскопов и времени корреляции случайного процесса дрейфа гироскопов, дисперсии постоянной составляющей ошибки масштабных коэффициента гироскопов, дисперсии флуктуационной составляющей перекоса осей гироскопов и времени корреляции случайного процесса перекоса осей гироскопов вычисляется оптимальная угловая скорость вращения инерциального измерительного блока.
Технический результат предлагаемого устройства достигается тем, что в устройство для осуществления способа автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, включающее инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока, цифровой микропроцессор, блок сопряжения с навигационной информацией, шину навигационной информации, блок определения параметров акселерометров, блок определения параметров гироскопов, при этом инерциальный измерительный блок закреплен на механизме вращения, выход блока акселерометров и выход блока лазерных гироскопов соединены с входами блока электроники инерциального измерительного блока, выход которого через цифровой микропроцессор и блок сопряжения с навигационной информацией соединен с шиной навигационной информации с целью учета статистических характеристик погрешностей установки осей чувствительности гироскопов введен блок управления механизмом вращения, блок определения параметров акселерометров, блок определения параметров гироскопов, блок определения параметров перекоса осей гироскопов, при этом выход блока электроники инерциального измерительного блока соединен с входами блока управления механизмом вращения непосредственно и через блок определения параметров акселерометров, блок определения параметров гироскопов, блок определения параметров перекоса осей чувствительности гироскопов, выход блока управления механизмом вращения соединен с входом механизма вращения.
Существенными отличительными признаками от прототипа по способу является следующее действие:
осуществляется учет статистических характеристик погрешностей установки осей чувствительности гироскопов при определении параметров закона вращения инерциального измерительного блока,
по устройству - блок управления механизмом вращения, блок определения параметров акселерометров, блок определения параметров гироскопов, блок определения параметров перекоса осей чувствительности гироскопов,
новые связи между известными и новыми признаками.
Применение всех новых признаков позволяет повысить точность определения пилотажно-навигационных параметров БИНС за счет учета статистических характеристик погрешностей установки осей чувствительности гироскопов при определении параметров закона вращения инерциального измерительного блока.
Сущность способа компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем заключается в следующем.
Матричное дифференциальное уравнение, характеризующее динамику изменения ошибок БИНС с течением времени автономной работы, представим в следующем виде [3]:

где: Р - ковариационная матрица ошибок БИНС с автокомпенсацией погрешностей;
F - матрица состояния ошибок БИНС с автокомпенсацией;
G - матрица возмущений;
Q - матрица интенсивности белого шума.
Структура матрицы состояния ошибок F такова, что даже при стационарных входных возмущающих воздействиях выходные ошибки БИНС не стационарны.
Флуктуационные составляющие погрешностей лазерных гироскопов  представляют собой стационарные случайные процессы с нулевым математическим ожиданием и корреляционной функцией:
представляют собой стационарные случайные процессы с нулевым математическим ожиданием и корреляционной функцией:

где  - дисперсия флуктуационной составляющей дрейфа гироскопов;
- дисперсия флуктуационной составляющей дрейфа гироскопов;

Флуктуационная составляющая дрейфов гироскопов вызывается различными причинами:
- изменение длины пути лучей из-за расширения, сжатия и изгиба материала, из которого сделан гироблок;
- неточность регулирования силы тока, необходимой для поддержания лазерной генерации;
- неточность регулирования амплитуды вибрационной подставки;
- градиент температур вдоль активной среды лазерного гироскопа.
Постоянная составляющая погрешности масштабного коэффициента лазерного гироскопа  представляет собой случайную величину, распределенную по нормальному закону с нулевым математическим ожиданием и дисперсией
представляет собой случайную величину, распределенную по нормальному закону с нулевым математическим ожиданием и дисперсией  .
.
На величину и стабильность масштабного коэффициента гироскопов влияет множество факторов, но при этом можно выделить основные, например, на ошибку масштабного коэффициента лазерного гироскопа преобладающее воздействие оказывают частотная зависимость показателя преломления газовой среды и затягивание частоты генерации к центру атомной линии.
Флуктуационная составляющая ошибки акселерометра 

где  - среднеквадратическое отклонение флуктуационной составляющей ошибки акселерометра;
- среднеквадратическое отклонение флуктуационной составляющей ошибки акселерометра;
 - дисперсия флуктуационной составляющей ошибки акселерометра;
- дисперсия флуктуационной составляющей ошибки акселерометра;

Для современных акселерометров характерны следующие параметры:
 ,
,
При объединении гироскопов в блок чувствительных элементов большое значение приобретает стабильность взаимного расположения осей чувствительности гироскопов относительно друг друга и относительно осей акселерометров. Погрешности установки (перекосы) осей чувствительности гироскопов возникают из-за неточной калибровки системы, механических вибраций и температурных деформациях ИИБ. Данная погрешность имеет постоянную и флуктуационную составляющие:
Постоянная составляющая перекоса осей чувствительности гироскопов, объединенных в блок чувствительных элементов  , представляет собой случайную величину, распределенную по нормальному закону с нулевым математическим ожиданием и определенной дисперсией. Флуктуационная составляющая
, представляет собой случайную величину, распределенную по нормальному закону с нулевым математическим ожиданием и определенной дисперсией. Флуктуационная составляющая  перекоса осей чувствительности гироскопов - нормальный стационарный случайный процесс с корреляционной функцией вида:
перекоса осей чувствительности гироскопов - нормальный стационарный случайный процесс с корреляционной функцией вида:
где  - среднеквадратическое отклонение флуктуационной составляющей перекоса осей чувствительности гироскопов;
- среднеквадратическое отклонение флуктуационной составляющей перекоса осей чувствительности гироскопов;
 - время корреляции случайного процесса.
- время корреляции случайного процесса.
Для современных БИНС  с. Постоянная составляющая перекоса осей чувствительности гироскопов для современных систем находится в диапазоне 3-10 угл. сек.
с. Постоянная составляющая перекоса осей чувствительности гироскопов для современных систем находится в диапазоне 3-10 угл. сек.
Решая уравнение (1) с учетом статистических характеристик погрешностей гироскопов, акселерометров и погрешностей установки осей чувствительности гироскопов получим соотношения для ошибок БИНС по широте и долготе [3]:


где  - угловая скорость вращения Земли;
- угловая скорость вращения Земли;
g - ускорение свободного падения;
R - радиус Земли;
t - текущее время полета ЛА;
 - угловая скорость вращения ИИБ;
- угловая скорость вращения ИИБ;
 - ошибка определения широты;
- ошибка определения широты;
 - ошибка определения долготы.
- ошибка определения долготы.
Пользуясь соотношениями (4) и (5) можно найти угловую скорость вращения ИИБ , которая обеспечивает минимум суммы дисперсий ошибок по координатам:

Для этого необходимо решить уравнение

Выполнив дифференцирование, находим, что
Соотношение (7) является необходимым условием минимума функции (6). Достаточным условием минимума функции является выполнение неравенства  наряду с выполнением равенства (8). Проверим выполнение этого условия:
наряду с выполнением равенства (8). Проверим выполнение этого условия:
 .
.
Это выражение больше нуля при любом t больше 0. Следовательно, соотношение (8) позволяет вычислить угловую скорость вращения ИИБ, при которой обеспечивается минимум суммы дисперсий ошибок по координатам [3].
Соотношение (8) определяет функциональную зависимость между требуемой угловой скоростью вращения ИИБ и инструментальными погрешностями лазерных гироскопов, акселерометров и погрешностями установки осей чувствительности гироскопов.
Данная функциональная зависимость используется в блоке управления механизмом вращения для вычисления заданной угловой скорости вращения ИИБ.
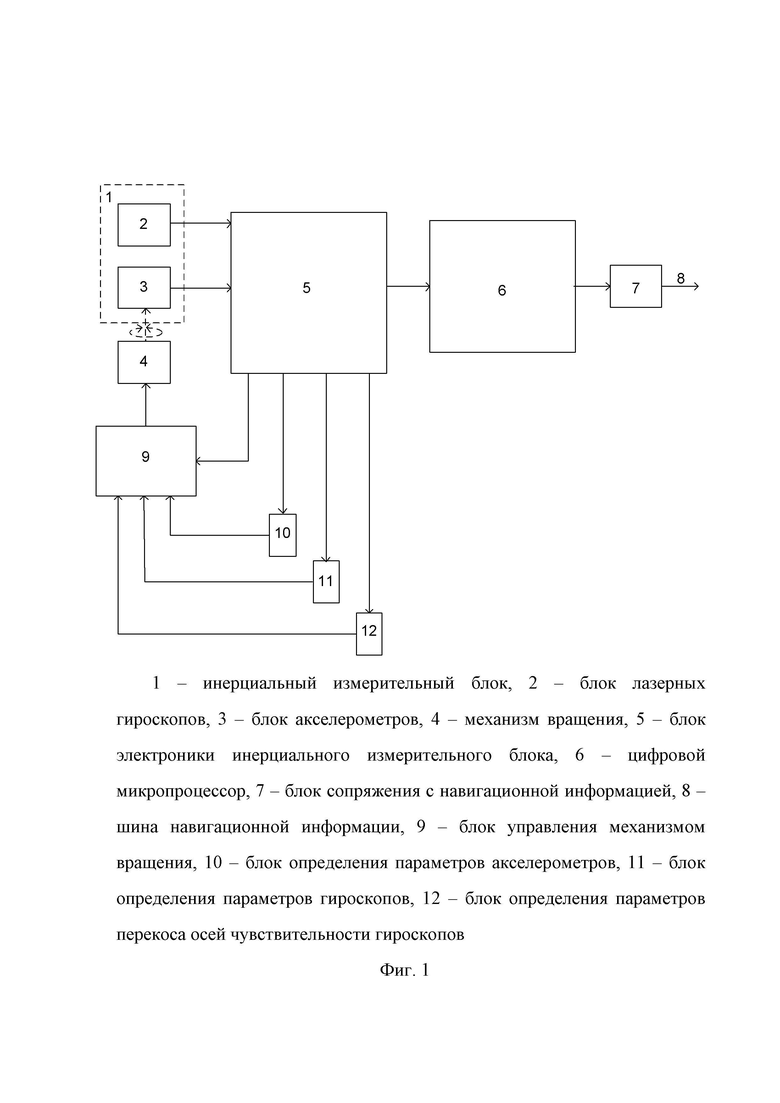
На фигуре 1 изображена блок-схема устройства для автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем.
В состав устройства входят инерциальный измерительный блок 1, включающий блок лазерных гироскопов 2, блок акселерометров 3, выходы которых соединены с входами блока 5 электроники инерциального измерительного блока, выходы которого соединены с цифровым микропроцессором 6, блоком управления механизмом вращения 9, блоком определения параметров акселерометров 10, блоком определения параметров гироскопов 11, блоком определения параметров перекоса осей чувствительности гироскопов 12. Выход цифрового микропроцессора 6 через блок сопряжения с навигационной информацией соединен с шиной навигационной информации 8. Выходы блока определения параметров акселерометров 10, блока определения параметров гироскопов 11, блока определения параметров перекоса осей чувствительности гироскопов 12 соединены с входами блока управления механизмом вращения 9, выход которого соединен с входом механизма вращения 4.
Инерциальный измерительный блок 1 состоит из блока лазерных гироскопов 2, блока акселерометров 3 и закреплен на механизме вращения 4.
Блок электроники инерциального измерительного блока 5 представляет собой устройство, которое выдает сигнал текущей угловой скорости вращения инерциального измерительного блока в блок управления механизмом вращения 9, а также выполняет функцию связующего устройства между блоком лазерных гироскопов, блоком акселерометров и цифровым микропроцессором 6. Кроме того по сигналам с блока электроники инерциального измерительного блока 5 в блоке определения параметров акселерометров 10, блоке определения параметров гироскопов 11, блоке определения параметров перекоса осей чувствительности гироскопов 12 определяются параметры чувствительных элементов бесплатформенной инерциальной навигационной системы.
Блок сопряжения с навигационной информацией 7 предназначен для преобразования сигналов с выхода цифрового микропроцессора 6 в цифровой код шины навигационной информации 8.
Блок определения параметров акселерометров 10 на основании информации о параметрах акселерометров с блока электроники 5 инерциального измерительного блока выдает в блок управления механизмом вращения 9 значения дисперсии флуктуационной составляющей ошибки акселерометра  и времени корреляции случайного процесса
и времени корреляции случайного процесса  .
.
Блок определения параметров гироскопов 11 на основании информации о параметрах гироскопов с блока электроники 5 инерциального измерительного блока выдает в блок управления механизмом вращения 9 значения дисперсии систематической составляющей ошибки масштабного коэффициента гироскопа  , дисперсии флуктуационной составляющей ошибки гироскопа
, дисперсии флуктуационной составляющей ошибки гироскопа  и времени корреляции случайного процесса
и времени корреляции случайного процесса  .
.
Блок определения параметров перекоса осей чувствительности гироскопов 12 на основании информации о параметрах установки гироскопов и конструкции ИИБ с блока электроники 5 инерциального измерительного блока выдает в блок управления механизмом вращения 9 значения дисперсии флуктуационной составляющей перекоса оси чувствительности гироскопа  и времени корреляции соответствующего случайного процесса
и времени корреляции соответствующего случайного процесса  .
.
Блок управления механизмом вращения 9 на основании информации о значениях статистических характеристик погрешностей гироскопов и акселерометров и значениях статистических характеристик перекоса осей чувствительности гироскопов вычисляет величину необходимой угловой скорости ИИБ. Вычисление необходимой угловой скорости ИИБ осуществляется на основании соотношения (8). Величина необходимой угловой скорости сравнивается с величиной текущей угловой скорости поступающей с блока электроники 5 инерциального измерительного блока. Данный сигнал выдается на двигатель механизма вращения 4, который осуществляет соответствующий поворот инерциального измерительного блока 1.
Сигналы пропорциональные абсолютной угловой скорости и ускорению с инерциального измерительного блока 1, через блок электроники инерциального измерительного блока 5, поступает в цифровой микропроцессор 6.
В цифровом микропроцессоре 6 происходит вычисление пилотажно-навигационных параметров, которые через блок сопряжения с навигационной информацией 7 поступают в шину навигационной информации 8 потребителям.
Технический эффект
Проведенный анализ способов-аналогов, в том числе ближайшего, показал следующее, что их недостатком является низкая потенциальной точность БИНС из-за отсутствия возможности осуществлять учет статистических характеристик погрешностей установки осей гироскопов при определении параметров закона вращения инерциального измерительного блока.
Заявляемый способ и устройство, его реализующее, имеют новые существенные признаки, а именно: способ позволяет осуществлять учет статистических характеристик погрешностей установки осей чувствительности гироскопов на основе данных о параметрах установки гироскопов и конструкции инерциального измерительного блока, поступающих из блока электроники в блок определения параметров перекоса осей чувствительности гироскопов, формируют значения флуктуационной составляющей перекоса оси чувствительности гироскопа и времени корреляции соответствующего случайного процесса, которые передаются в блок управления механизмом вращения, где на основании дисперсии флуктуационной составляющей ошибки акселерометров и времени корреляции случайного процесса ошибки акселерометров, дисперсии флуктуационной составляющей дрейфа гироскопов и времени корреляции случайного процесса дрейфа гироскопов, дисперсии постоянной составляющей ошибки масштабных коэффициента гироскопов, дисперсии флуктуационной составляющей перекоса осей гироскопов и времени корреляции случайного процесса перекоса осей гироскопов вычисляется оптимальная угловая скорость вращения инерциального измерительного блока, а в устройство введены блок управления механизмом вращения, блок определения параметров перекоса осей чувствительности гироскопов, а также новые связи между известными и новыми признаками. Наличие в заявляемом способе и устройстве, его реализующем, новых существенных признаков позволяет достичь технического результата - повышение точности определения пилотажных и навигационных параметров полета летательного аппарата за счет изменения параметров закона управления ИИБ в зависимости от статистических характеристик погрешностей установки осей чувствительности гироскопов.
Эксперимент, проведенный на основе математической модели заявляемого изобретения, показал, введенные новые существенные признаки привели к повышению точности автономного счисления координат за счет снижения темпа нарастания среднеквадратической ошибки определения местоположения, что эквивалентно уменьшению инструментальных погрешностей. При этом роста ошибки определения координат снижается в 1,5 - 2,5 раза.
Источники информации
1. Анучин О.Н. и др. Интегрированные системы ориентации и навигации для морских подвижных объектов. - СПб.: 1999. с. 331-338 (аналог).
2. Патент РФ №2585792 С1, кл. G01C21/10. Способ автономной компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления. 30.03.2015 (прототип).
3. Шепеть И.П., Онуфриенко В.В., Слесаренок С.В. Методическое обеспечение управляемых навигационных систем. (Монография). - Воронеж: Военный учебно-научный центр Военно-Воздушных Сил «Военно-Воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина», 2012. - с. 145-148.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНФОРМАЦИОННОГО КОМПЛЕКСА НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2792402C1 |
| СПОСОБ АВТОНОМНОЙ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2585792C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
| Способ инерциальной навигации беспилотного летательного аппарата и устройство для его осуществления | 2020 |
|
RU2744700C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
Изобретение относится к области навигационных измерений и может быть использовано для определения координат местоположения подвижного объекта, например летательного аппарата (ЛА). Сущность изобретения заключается в уточнении закона управления инерциального измерительного блока в зависимости от статистических характеристик погрешностей установки осей чувствительности гироскопов. Устройство компенсации инструментальных погрешностей БИНС содержит инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока, цифровой микропроцессор, блок сопряжения с навигационной информацией, шину навигационной информации, блок управления механизмом вращения, блок определения параметров акселерометров, блок определения параметров гироскопов, блок определения параметров перекоса осей чувствительности гироскопов. Технический результат - повышение точности определения пилотажных и навигационных параметров полета летательного аппарата. 2 н.п. ф-лы, 1 ил.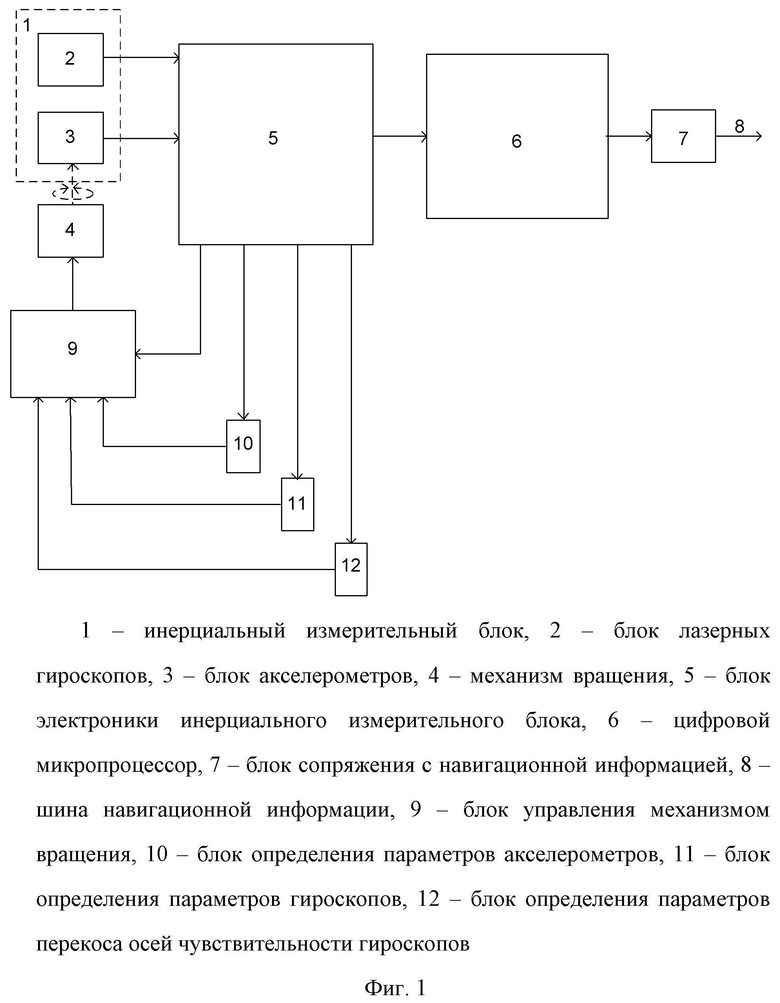
1. Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, заключающийся во вращении инерциального измерительного блока, состоящего из блока акселерометров и блока гироскопов и закрепленного на механизме вращения, получении информации об угловой скорости и ускорении летательного аппарата в блоках лазерных гироскопов и акселерометров, передаче данных об угловой скорости и ускорении летательного аппарата в цифровой микропроцессор, в котором вычисляются углы ориентации летательного аппарата и его координаты, уточнении закона управления инерциальным измерительным блоком с учетом статистических характеристик погрешностей гироскопов и акселерометров, отличающийся тем, что с целью учета погрешностей установки осей чувствительности гироскопов на основе данных о параметрах установки гироскопов и конструкции инерциального измерительного блока, поступающих из блока электроники в блок определения параметров перекоса осей чувствительности гироскопов, формируют значения флуктуационной составляющей перекоса оси чувствительности гироскопа и времени корреляции соответствующего случайного процесса, которые передаются в блок управления механизмом вращения, где на основании дисперсии флуктуационной составляющей ошибки акселерометров  и времени корреляции случайного процесса ошибки акселерометров
и времени корреляции случайного процесса ошибки акселерометров  , дисперсии флуктуационной составляющей дрейфа гироскопов
, дисперсии флуктуационной составляющей дрейфа гироскопов  и времени корреляции случайного процесса дрейфа гироскопов
и времени корреляции случайного процесса дрейфа гироскопов , дисперсии постоянной составляющей ошибки масштабных коэффициента гироскопов
, дисперсии постоянной составляющей ошибки масштабных коэффициента гироскопов  , дисперсии флуктуационной составляющей перекоса осей гироскопов
, дисперсии флуктуационной составляющей перекоса осей гироскопов  и времени корреляции случайного процесса перекоса осей гироскопов
и времени корреляции случайного процесса перекоса осей гироскопов  вычисляется оптимальная угловая скорость вращения инерциального измерительного блока
вычисляется оптимальная угловая скорость вращения инерциального измерительного блока  .
.
2. Устройство компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем, включающее инерциальный измерительный блок, в состав которого входят блок лазерных гироскопов и блок акселерометров, механизм вращения, блок электроники инерциального измерительного блока, цифровой микропроцессор, блок сопряжения с навигационной информацией, шину навигационной информации, блок определения параметров акселерометров, блок определения параметров гироскопов, при этом инерциальный измерительный блок закреплен на механизме вращения, выход блока акселерометров и выход блока лазерных гироскопов соединены с входами блока электроники инерциального измерительного блока, выход которого через цифровой микропроцессор и блок сопряжения с навигационной информацией соединен с шиной навигационной информации, отличающееся тем, что для учета статистических характеристик погрешностей установки осей чувствительности гироскопов дополнительно используется блок управления механизмом вращения, блок определения параметров перекоса осей чувствительности гироскопов, при этом выход блока электроники инерциального измерительного блока соединен с входами блока управления механизмом вращения непосредственно и через блок определения параметров акселерометров, блок определения параметров гироскопов, блок определения параметров перекоса осей чувствительности гироскопов, выход блока управления механизмом вращения соединен с входом механизма вращения.
| СПОСОБ АВТОНОМНОЙ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2585792C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| ЛАЗЕРНЫЙ ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2009 |
|
RU2395322C1 |

