Изобретение относится к области производства гироскопической техники, а именно к гироскопическим приборам, используемым в информационно-измерительных системах ориентации объектов и управления их движением, например, на вращающихся по крену управляемых летательных аппаратах.
Из предшествующего уровня техники известно, что гирокоординаторы могут формировать управляющий сигнал посредством измерения угла крена или значению синуса и косинуса этого угла. Ранее для решения данной задачи использовался датчик угла крена на базе механического трехстепенного гироскопа (раскладчик команд), например, импульсный трехстепенной гироскопический прибор (патент RU 2196963, G01C 19/02, опубликован 20.01.2003). Прибор содержит ротор, внутреннюю и наружную рамки карданова подвеса, спиральную ленточную пружину, корпус, датчик угла и арретир.
Недостатком таких гирокоординаторов является наличие большого количества подвижных частей, необходимость увеличения массогабаритных параметров для повышения точности и дискретности измерения угла крена.
Известен магнитный датчик скорости вращения по крену (патент США 6556896, ВА кл. НКИ 701-3, опубликован 29.04.2003). Устройство обеспечивает измерение скорости вращения по крену или углового положения по крену для управляемой ракеты и содержит пару магнитных датчиков, которые установлены внутри корпуса ракеты и генерируют аналоговый электрический сигнал, который отображает изменение интенсивности магнитного поля Земли вследствие наличия ферромагнитного элемента, который расположен внутри поля. Аналоговые сигналы преобразуют в цифровой формат и в составе потока данных передают на наземную станцию, где при помощи персонального компьютера вычисляют угловую скорость вращения ракеты по крену.
Недостатком изобретения является то, что использование интенсивности и направления вектора магнитного поля Земли приводит к погрешности, вызванной нестабильностью магнитного поля Земли.
Известен датчик крена и оборотов быстровращающегося управляемого снаряда (патент RU 143669, G01C 21/00 опубликован 27.08.2014), содержащий измеритель параметров снаряда, выполненный в виде двух акселерометров, жестко связанных с объектом так, что их оси чувствительности взаимно ортогональны и перпендикулярны продольной оси быстрого вращающегося снаряда, и вычислитель параметров снаряда, выполненный в виде микроконтроллера, причем выходы акселерометров подключены к двум информационным входам микроконтроллера, в состав измерителя параметров снаряда дополнительно введены последовательно соединенные измеритель угловой скорости вращения снаряда и интегратор, а также двухосный датчик магнитного поля Земли, причем выходы интегратора и датчика магнитного поля Земли подключены к информационным входам микроконтроллера.
Недостаток полезной модели заключается в сложности конструкции, необходимости применения оптимальных методов обработки и фильтрации сигнала, сложности калибровки и необходимости температурной компенсации.
Известен раскладчик команд на волновых твердотельных гироскопах (ВТГ) [Теория гироскопических систем. Гироприборы: учебное пособие для вузов / В.Я. Распопов: ТулГУ-Тула: Изд-во ТулГУ, 2018. - 194 с.], принятый в качестве прототипа. Раскладчик команд содержит металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов. Причем диаметрально противоположные пьезоэлементы образуют четыре пары. Пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур. В конструкции также содержится блок электроники, демодулятор.
Подобный прибор на базе ВТГ с металлическим цилиндрическим резонатором может использоваться как в режиме свободной волны, так и в режиме датчика угловой скорости. В работе также отмечается, что если летательный аппарат имеет большой диапазон изменения угловой скорости по крену, то предпочтительно построение датчика угла крена на базе ВТГ в режиме свободной волны.
Существенным недостатком прототипа является малое время функционирования вследствие малой добротности.
Также известно [Лунин Б.С., Матвеев В.А., Басараб М.А. Волновой твердотельный гироскоп. Теория и технология: [монография] / Лунин Б.С., Матвеев В.А., Басараб М.А. - М.: Радиотехника, 2014. - 174 с.: ил. - Библиогр.: с. 159-171], что добротность металлического резонатора обычно не превышает величины 35000, вследствие этого длительность функционирования ВТГ в режиме свободной волны значительно ограничена. Оценку продолжительности работы датчика угла крена на базе ВТГ можно выполнить по формуле, предложенной в работе [Lynch, D.D. Coriolis vibratory gyroscope. IEEE standard specification format guide and test procedure for Coriolis vibratory gyros // IEEE std.1431 annex B. P. 56-66]

где Q - добротность резонатора;
ω0 - собственная частота резонатора.
Так как собственная частота второй формы колебаний большинства ВТГ с металлическим резонатором составляет около 5700 Гц (ω0=3,581⋅104 рад/с), то при добротности Q=35000, имеем постоянную времени около 2 с, следовательно, продолжительность функционирования датчика угла крена на базе ВТГ будет составлять величину 3 Т≈6 с, что значительно ограничивает применение такого датчика угла.
Задача, на решение которой направлено заявленное изобретение, заключается в увеличении времени функционирования путем повышения добротности датчика угла крена на базе волнового твердотельного гироскопа с металлическим резонатором.
Данная задача решается за счет того, что датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором содержит металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов, причем диаметрально противоположные пьезоэлементы образуют четыре пары, пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур, блок электроники, демодулятор. Дополнительно в блок электроники введены интегрирующие усилители в первый и второй контуры, образующие обратную связь по угловой скорости, генератор синусоидальных сигналов, для возбуждения свободной волны в металлическом цилиндрическом резонаторе. Для обеспечения запуска генератора синусоидальных сигналов в его электрическую цепь введен ключ. Кроме того введен дополнительно ключ в электрическую цепь интегрирующего усилителя первого контура.
Сущность изобретения поясняется графическими материалами. На фиг. 1 представлена структурная схема реализации датчика угла крена на базе волнового твердотельного гироскопа с металлическим резонатором. На фиг. 2 представлен график выходного сигнала прототипа с первого контура. На фиг. 3 график выходного сигнала с первого контура предлагаемого устройства.
Датчик угла крена 1 на базе волнового твердотельного гироскопа с металлическим резонатором содержит металлический цилиндрический резонатор 2 (показан условно), на дне 3 которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов, причем диаметрально противоположные пьезоэлементы образуют четыре пары. Пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур.
Блок электроники 4, входящий в состав датчика угла крена 1, дополнительно содержит: генератор синусоидальных сигналов 5, в электрическую цепь которого введен ключ К1; интегрирующий усилитель 6 с ключом К2, введеный в первый контур; интегрирующий усилитель 7, введеный во второй контур. Питание блока электроники 4 осуществляется от внешнего источника питания. Генератор синусоидального сигнала 5 позволяет обеспечить в начальный момент времени возбуждение свободной волны в металлическом цилиндрическом резонаторе 2, при замкнутом ключе К1 на собственной частоте резонатора. Введение интегрирующего усилителя 6 в первый контур и интегрирующего усилителя во второй контур, образующих обратную связь по угловой скорости, позволяет реализовать схемотехнический способ увеличения добротности. Демодулятор 8, входящий в состав блока электроники 4, осуществляет демодуляцию сигналов и вычисление угла крена.
Устройство работает следующим образом. В начальный момент времени блок электроники 4, входящий в состав датчика угла крена 1, подает управляющий сигнал на ключ К1, который замыкается, и с генератора синусоидальных сигналов 5 на диаметрально противоположные пьезоэлементы I-I подается сигнал в виде синусоидального напряжения Asin(ωt), где А - амплитуда, ω - частота подачи переменного сигнала, равная (или близкая) к собственной частоте основной формы колебаний металлического цилиндрического резонатора 2.
Вследствие изгибных деформаций дна 3 металлического цилиндрического резонатора 2 возникает изгибающий момент, который вызывает эллиптические деформации на второй форме колебаний, в результате чего возбуждается стоячая волна с четырьмя областями, ориентированными вдоль пары пьезоэлементов I-I и II-II и четырьмя областями, расположенными вдоль пары пьезоэлементов III-III и IV-IV. Через одну секунду после подачи управляющего сигнала ключ К1 размыкается, а ключ К2 замыкается. Тем самым реализуется схемотехнический способ увеличения добротности, при этом сигнал с пары пьезоэлементов I-I поступает на интегрирующий усилитель 6, расположенный в первом контуре и далее поступает на пару пьезоэлементов II-II. Аналогично сигнал с пары пьезоэлементов III-III поступает на интегрирующий усилитель 7, расположенный во втором контуре и далее поступает на пару пьезоэлементов IV-IV.
После замыкания ключа К2 датчик угла крена 1 приходит в рабочее состояние, и при вращении колеблющегося металлического цилиндрического резонатора 2 вокруг его оси симметрии, обусловленного поворотом на угол крена летательного аппарата, с постоянной угловой скоростью возникают кориолисовые силы инерции, привязанные к запаздыванию стоячей волны. Полученный сигнал с первого контура и второго контура, сдвинутый по фазе на минус 90 градусов поступает в демодулятор 8, где осуществляется демодуляция сигналов и вычисление угла крена на основе соотношения:
где K - коэффициент прецессии волны (коэффициент Брайна);
X - сигнал с первого контура,
Y - сигнал со второго контура.
На фиг. 2 приведен выходной сигнал прототипа с первого контура без введения обратной связи, у которого частота собственных колебаний, резонатора 5700 Гц (ω0=3,581⋅104 рад/с). На основании формулы (1) можно определить добротность такого резонатора, которая будет соответствовать Q=35000, при этом время функционирования составит шесть секунд. На фиг. 3 приведен выходной сигнал с первого контура предлагаемого прибора с аналогичной частотой собственных колебаний резонатора, и в соответствии с формулой (1) добротность такого резонатора будет составлять Q=350000, а время функционирования составит шестьдесят секунд. Таким образом, добротность и время функционирования увеличиваются в 10 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла на базе волнового твердотельного гироскопа с металлическим резонатором | 2024 |
|
RU2832852C1 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП С МЕТАЛЛИЧЕСКИМ РЕЗОНАТОРОМ | 2021 |
|
RU2785956C1 |
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| Способ определения угловой скорости с использованием волнового твердотельного гироскопа | 2019 |
|
RU2729944C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| СПОСОБ СЧИТЫВАНИЯ И УПРАВЛЕНИЯ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА С ОПТИЧЕСКИМИ ДАТЧИКАМИ КОЛЕБАНИЙ РЕЗОНАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2194947C1 |


Изобретение относится к области производства гироскопической техники, а именно к гироскопическим приборам, используемым в информационно-измерительных системах ориентации объектов и управления их движением, например, на вращающихся по крену управляемых летательных аппаратах. Датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором содержит металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов, причем диаметрально противоположные пьезоэлементы образуют четыре пары, пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур, блок электроники, демодулятор. При этом в блок электроники введен интегрирующий усилитель в первый контур и интегрирующий усилитель во второй контур, образующие обратную связь по угловой скорости, генератор синусоидальных сигналов, для возбуждения свободной волны в металлическом цилиндрическом резонаторе. Для обеспечения запуска генератора синусоидальных сигналов в его электрическую цепь введен ключ. Кроме того, введен дополнительно ключ в электрическую цепь интегрирующего усилителя первого контура. Технический результат – увеличение добротности и времени функционирования датчика угла крена на базе волнового твердотельного гироскопа с металлическим резонатором более чем в десять раз. 3 ил.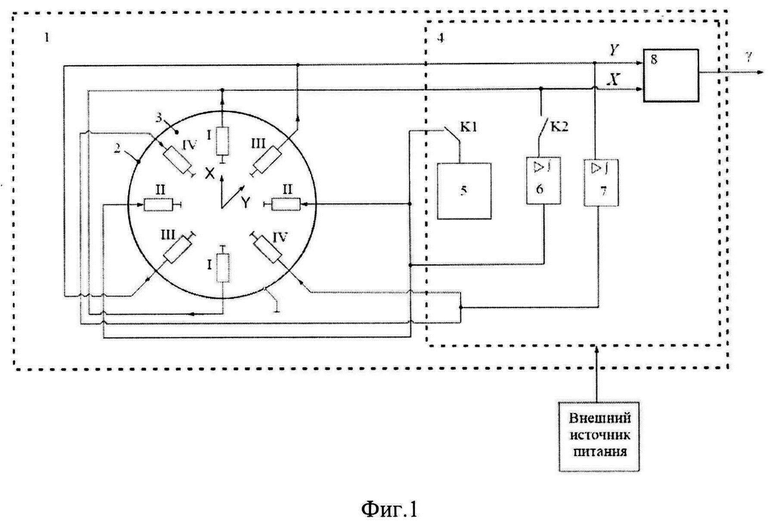
Датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором, содержащий металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов, причем диаметрально противоположные пьезоэлементы образуют четыре пары, пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур, блок электроники, демодулятор, отличающийся тем, что дополнительно в блок электроники введены интегрирующие усилители в первый и второй контуры, образующие обратную связь по угловой скорости, генератор синусоидальных сигналов, для возбуждения свободной волны в металлическом цилиндрическом резонаторе, для обеспечения запуска генератора синусоидальных сигналов в его электрическую цепь введен ключ, кроме того введен дополнительно ключ в электрическую цепь интегрирующего усилителя первого контура.
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| Смеситель непрерывного действия | 1961 |
|
SU151978A1 |
| Способ съемки обводов судов в доке и устройство для осуществления этого способа | 1957 |
|
SU109851A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДИСКОВЫЙ ГИРОСКОП | 2002 |
|
RU2218555C2 |
| ВЫСОКОВОЛЬТНЫЙ ТРАНСФОРМАТОР НАПРЯЖЕНИЯ | 1992 |
|
RU2035776C1 |

