Предлагаемые изобретения относятся к средствам обеспечения навигации воздушных платформ, используемых для формирования беспроводных сетей передачи информации по линии прямой видимости в заданной географической области.
Беспроводные широкополосные сети практически находятся вне конкуренции по оперативности развертывания для географических областей, в которых большая территория сочетается с невысокой плотностью населения, широкополосные беспроводные решения имеют особое значение, так как позволяют экономично и оперативно создавать телекоммуникационную инфраструктуру на обширных территориях.
Использование воздушных платформ обеспечивает телекоммуникационное покрытие больших географических регионов. Одновременно с созданием региональных сетей передачи данных, голоса и видеоинформации высотные платформы могут применяться для целей видеонаблюдения в радиусе 70-80 км (например, в приграничных территориях или наблюдения транспортных потоков), обнаружения лесных пожаров, экологического мониторинга с использованием сенсорных сетей, геологической и геофизических разведок, радиологического контроля и т.д.
Продолжительность навигации при использовании высотных платформ региональных сетей на высотах до 1 км в естественных условиях окружающей среды на открытых пространствах обуславливает первоочередность задачи обеспечения надежности эксплуатации и управления воздушными платформами, в том числе доступность и дешевизну энергетических ресурсов питания их двигательных установок и приборной системы. При этом также следует учитывать необходимость их грозозащищенности и климатической устойчивости.
Одной из важнейших задач обеспечения навигации беспилотных летательных аппаратов при их использовании в промышленных масштабах является оптимизация количества ступеней преобразования доступных энергетических ресурсов в вертикальную составляющую тяги летательного аппарата.
Использование реактивных двигателей, установленных на концах вертолетных винтов, известно, например, в беспилотном вертолете немецкой фирмы «Dornier» DO-32К "Kibitz", в котором два турбокомпрессорных двигателя «холодного цикла» работают на несущий винт. Однако турбореактивные двигатели работают на жидком топливе (керосине, бензине), который под большим давлением подается наверх и обеспечивает работоспособность системы в течение относительно небольшого времени эксплуатации. Из-за гидростатического давления жидкости шланг становится толстостенным, а значит и тяжелым (тем более вместе с жидкостью), что неприменимо в случае длительного использования летательного аппарата для навигации воздушных платформ систем беспроводной связи.
Известен способ создания реактивной силы для вращения реактивного винта вертолета, основанной на приложении реактивной силы к концам лопастей винта, создаваемой за счет преобразования химической энергии топлива в кинетическую энергию струи, истекающей из сопла воздушно-реактивного двигателя, таким образом, что последовательно преобразуют химическую энергию топлива сначала в электрическую энергию посредством бортового электрогенератора, затем в тепловую энергию перегретого пара в электронагревателе и, наконец, в кинетическую энергию паровоздушной струи, истекающей из сопла воздушно-реактивного двигателя (патент РФ №2107643, 1998.03.27). Данную последовательность преобразования энергии реализует вертолетный силовой агрегат реактивного привода несущего винта, содержащий воздушно-реактивные двигатели, установленные на концах лопастей несущего винта, и размещенные внутри полостей лопастей средства подвода рабочего тела и энергии к воздушно-реактивным двигателям от источников рабочего тела и энергии, расположенных внутри фюзеляжа, характеризующихся тем, что каждый воздушно-реактивный двигатель снабжен двумя соосными винтами, турбопоршневым блоком и эжекторным насадком, размещенным вокруг выхлопного сопла, каждое средство подвода рабочего тела и энергии к каждому воздушно-реактивному двигателю выполнено в виде электромагнитной камеры, соединенной электрическими проводами с электрогенератором внутри фюзеляжа, входной патрубок электронагревателя выполнен с возможностью соединения с баком для воды внутри фюзеляжа, а выходной патрубок выполнен с возможностью соединения с турбопоршневым блоком воздушно-реактивного двигателя.
Однако для обеспечения навигации воздушных платформ беспроводных сетей указанное техническое решение неприемлемо, так как все системы преобразования энергии и сами источники энергии находятся на летательном аппарате и не могут обеспечить необходимый ресурс работы.
Наиболее близкими аналогами являются способ формирования региональных беспроводных сетей передачи информации, реализованный в телекоммутационной воздушной платформе (патент РФ №52296 на полезную модель, опубл. 10.03.06 г.). Особенность способа формирования региональных беспроводных сетей передачи информации, включающего размещение воздушных телекоммутационных платформ на заданных высотах путем создания подъемной силы для их удержания в заданных точках региональной сети географического региона и стабилизацию положения платформ в этих точках, заключается в том, что подъемную силу для каждой платформы создают с помощью дистанционно и/или автономно пилотируемого летательного аппарата за счет вертикальной составляющей его вектора тяги, а удержание этого летательного аппарата и платформы в заданной точке региональной сети географического региона осуществляют, связывая их с заданной точкой поверхности географического региона гибкой тягой, которую используют в качестве канала подачи энергии питания для обеспечения создания вектора тяги летательного аппарата. Стабилизацию положения платформы обеспечивают за счет инерциальной навигации летательного аппарата в заданной точке региональной сети географического региона.
Телекоммутационная воздушная платформа отличается тем, что узел формирования подъемной силы выполнен в виде фюзеляжа с приборным отсеком, связанного с винтовым движителем в виде, по меньшей мере, одной гондолы, в которой установлены электрический двигатель с редуктором и тяговым винтом, при этом фюзеляж связан посредством двухосного карданового подвеса с кабель-тросом, второй конец которого зафиксирован с возможностью изменения длины кабель-троса в заданной точке поверхности географического региона и связан с источником электрической энергии в этой точке.
Недостатками указанных технических решений является то, что не во всех географических регионах имеются достаточные электроэнергетические ресурсы для обеспечения надежной и непрерывной навигации воздушных платформ, а также низкая грозозащищенность и климатическая устойчивость силовых электрических цепей.
Технический результат предлагаемых изобретений заключается в расширении функциональных возможностей способа обеспечения навигации и повышении надежности навигации воздушных платформ телекоммуникационной информационной сети за счет повышения грозозащищенности и климатической устойчивости канала подачи энергии питания двигателей тягового винта и приборов воздушных платформ.
Указанный технический результат достигается в способе обеспечения навигации воздушных платформ беспроводных сетей передачи информации, включающем создание подъемной силы летательного аппарата для размещения связанной с ним платформы на заданной высоте и удержание летательного аппарата и платформы в заданной точке поверхности гибкой тягой, используемой в качестве канала подачи энергии питания для создания вектора тяги подъемной силы летательного аппарата, тем, что в качестве энергоносителя для создания энергии питания используют газообразное рабочее тело, которое под давлением закачивают в канал подачи энергии питания гибкой тяги, а на выходе этого канала преобразуют энергию газообразного рабочего тела в энергию создания подъемной силы летательного аппарата.
Кроме того, для создания подъемной силы летательного аппарата могут энергию газообразного рабочего тела в виде горючего или природного газа на выходе канала подачи энергии питания преобразовывать в электрическую мощность.
Кроме того, для создания подъемной силы летательного аппарата могут энергию газообразного рабочего тела в виде горючего газа или природного газа или сжатого воздуха преобразовывать в реактивную тягу.
Указанный технический результат для первого варианта привязной воздушной платформы для беспроводных сетей передачи информации, содержащей станцию приема и передачи сигналов в заданном географическом регионе, связанную с узлом формирования подъемной силы в виде приборного отсека, электрического двигателя с редуктором и тягового винта, а сам узел связан с гибкой тягой, второй конец которой зафиксирован с возможностью изменения длины тяги в заданной точке поверхности географического региона, достигается тем, что в приборном отсеке воздушной платформы установлен, по меньшей мере, один топливный элемент преобразования энергии горючего или природного газа в электрическую энергию, а гибкая тяга выполнена с полым каналом, нижний конец которого сообщен с источником горючего или природного газа, а верхний - по меньшей мере, с одним топливным элементом, электрический выход которого связан с входом электрического двигателя тягового винта.
Для второго варианта привязной воздушной платформы для беспроводных сетей передачи информации, содержащей станцию приема и передачи сигналов в заданном географическом регионе, связанную с узлом формирования подъемной силы в виде тягового винта с двигателем его вращения и приборным отсеком, а сам узел связан с гибкой тягой, второй конец которой зафиксирован с возможностью изменения длины тяги в заданной точке поверхности географического региона, указанный технический результат достигается тем, что гибкая тяга выполнена с полым каналом, нижний конец которого сообщен с источником горючего или природного газа или сжатого воздуха, а верхний с двигателем вращения тягового винта, выполненным в виде реактивного движителя.
Кроме того, в этом варианте воздушной платформы реактивный движитель может быть выполнен в виде прямоточного реактивного двигателя с элементом зажигания горючего или природного газа.
Кроме того, в этом варианте воздушной платформы реактивный движитель может быть выполнен в виде преобразователя давления сжатого воздуха во вращательное движение тягового винта.
Изобретения поясняются чертежами.
На фиг.1 показана конструктивная схема, иллюстрирующая первый вариант выполнения платформы;
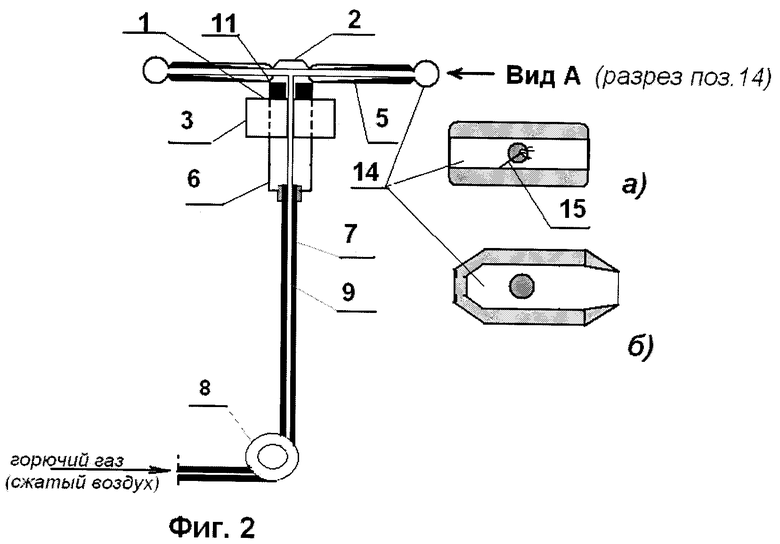
на фиг.2 представлена конструктивная схема, иллюстрирующая второй вариант выполнения платформы.
Воздушная платформа 1 для беспроводных сетей передачи информации содержит узел формирования подъемной силы (летательный аппарат) 2, связанную с этим узлом станцию 3 приема и передачи сигналов в заданном географическом регионе. Узел формирования подъемной силы 2 выполнен с приборным отсеком 11 и связан с винтовым движителем 4, приводимым во вращение электрическим двигателем 12 с редуктором 10 и тяговым винтом 5. Узел формирования подъемной силы связан посредством двухосного карданового подвеса 6 с гибкой тягой 7, второй конец которой зафиксирован с возможностью изменения длины гибкой тяги, например, на катушке 8 в заданной точке поверхности географического региона и связан с источником газа или сжатого воздуха (не показаны).
Станция 3 приема и передачи сигналов в заданном географическом регионе выполнена в виде базовой станции системы беспроводного широкополосного доступа и размещена в приборном отсеке, который может также содержать (не показаны) аккумуляторную батарею, преобразователи напряжения, вторичные источники питания, видеокамеру наблюдения.
Гибкая тяга 7 выполнена с полым каналом 9, в который закачивается горючий или природный газ или сжатый воздух.
В первом варианте выполнения изобретения в приборном отсеке 11 размещены, по меньшей мере, один или более топливных элементов 13, которые электрически связаны с электродвигателем 12 вращения тягового винта 5.
Во втором варианте выполнения изобретения полый канал 9 проходит насквозь до высоты реактивного движителя 14 вращения тягового винта 5. В случае закачивания в полый канал 9 горючего или природного газа реактивный движитель выполнен в виде прямоточного реактивного двигателя 14а) с элементом зажигания 15. В случае закачивания в полый канал 9 сжатого воздуха реактивный движитель выполнен в виде преобразователя давления сжатого воздуха 14б) во вращательное движение тягового винта. В простейшем случае это может быть патрубок с глухой стенкой с одной стороны и соплом с другой стороны. Также могут быть использованы известные пневматические схемы преобразования давления сжатого воздуха во вращательное движение (центробежные, осевые и т.д.). Узел 2 и приборный отсек 11 имеют герметизирующие уплотнители вращения.
Работа телекоммуникационной воздушной платформы осуществляется следующим образом.
Подъемная сила создается воздушным тяговым винтом 5, вращение которого обеспечивается преобразователями энергии газообразного рабочего тела в полом канале 9. Для создания горизонтальной составляющей тяги винта электродвигатель, установленный в кардановый подвес, наклоняется в нужном направлении при помощи системы управления и стабилизации (не показана).
Кроме этого указанные платформы могут обеспечить функции видеонаблюдения и ряд других функций, которые были описаны ранее.
Преобразователь энергии по первому варианту представляет собой электрический привод с подачей энергии в виде горючего природного газа с последующим преобразованием в электрическую энергию с помощью топливных элементов.
Энергия на платформу, висящую на высоте 200-400 м передается с помощью изоляционной пластмассовой трубки. Химическая энергия природного газа преобразуется непосредственно в электрическую с помощью так называемых топливных элементов [Юсти Э., Винзель. Топливные элементы. - М.: Мир, 1964. - 480 с. Топливные элементы. Кинетика водородных процессов. - М.: Наука, 1968. - 373 с.]. Общий КПД таких элементов состоит из 2 частей: электрической и тепловой (см. таблицу 1).
Таблица 1
Как видно из таблицы, КПД выхода электрической энергии колеблется от 30 до 60% (в среднем ˜45%). Использовать дополнительную тепловую энергию, которой только 20% и это скорее всего рассеянная теплота, можно на дополнительный обогрев при низких температурах эксплуатации.
Преобразование энергии по вариантам выполнения изобретения отличаются следующим:
- В первом варианте - двойное преобразование - химическая энергия в электрическую преобразуется с КПД ˜45%, далее электрическая энергия преобразуется в механическую КПД ˜80%, т.е. суммарный КПД ˜36%. Причем имеются 2 преобразователя определенного веса.
- Во втором - одноразовое преобразование - химическая энергия газа или потенциальная энергия сжатого воздуха превращается в механическую с помощью прямоточного реактивного двигателя или преобразователя давления сжатого воздуха 14б) во вращательное движение тягового винта.
КПД прямоточного реактивного двигателя зависит от коэффициента сжатия (см. ниже)
При к=1,35
Таблица 2

Прямоточный двигатель достаточно прост и надежен, т.к. не имеет подвижных частей. В нем отсутствуют клапаны и турбина. Но он не может работать при нулевой скорости набегающего потока. В нашем случае это не имеет решающего значения, т.к. двигатели расположены на концах вертолетных лопастей, которые еще на Земле можно раскрутить посторонним двигателем до скоростей, достаточных для устойчивой работы прямоточного двигателя.
Остается лишь вопрос применимости в качестве горючего - природного газа (или смеси пропан-бутан, применяемые в быту в сжиженном виде при давлении 11-16 атм в баллонах) и какие степени сжатия можно допускать.
Сжиженные газы применяют даже в дизельных двигателях с коэффициентом сжатия ε=12-20. Там проблемы не с октановым числом, а с цетановым, которое влияет на самовоспламенение в дизельных двигателях.
Эта проблема с зажиганием может возникнуть и в нашем случае, но она должна быть решена однократно и еще на Земле (т.е. до подъема на высоту).
Вторая проблема прямоточных двигателей - это прогорание камеры сгорания. Она может быть решена, например, путем применения керамики.
Для расчета шланга имеются две формулы
 - для ламинарного движения
- для ламинарного движения
 - для турбулентного движения
- для турбулентного движения
где  - расход жидкости или газа,
- расход жидкости или газа,
d - диаметр трубопровода,
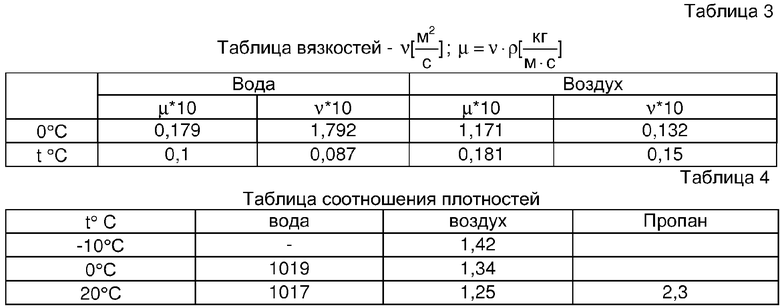
ν - кинематическая вязкость,
ρ - плотность жидкости (газа).
Калорийность газа  [Справочник машиностроителя. В трех томах. Том 1. Ред. акад. Е.А. Чудаков. М., ГИНТИ «Машиностроение», 1951 г., 1036 с.]. Здесь 1 [нм3] - это так называемый нормальный кубометр (т.е. при 1 атм и нормальной температуре). Вес 1 [нм] равен 0,8 кг. Отсюда
[Справочник машиностроителя. В трех томах. Том 1. Ред. акад. Е.А. Чудаков. М., ГИНТИ «Машиностроение», 1951 г., 1036 с.]. Здесь 1 [нм3] - это так называемый нормальный кубометр (т.е. при 1 атм и нормальной температуре). Вес 1 [нм] равен 0,8 кг. Отсюда
Чтобы передать мощность Р=1 [кВт] (без учета КПД) необходимо прокачивать через шланг в 1 с следующее количество газа:
Поскольку: 1 кал=4,2 Дж; 1 ккал=4,2·103 [Дж]; 1 Дж=1 Вт·1 с,

Окончательно имеем: 
Химическую энергию газа можно перевести в механическую с помощью обычного двигателя внутреннего сгорания (ДВС) (КПД ˜25%) или с помощью воздушно-реактивного прямоточного двигателя (ВРД), КПД которого (43-55)% (см. таблицу 2). Тем самым мы должны увеличить показатель расхода топлива как минимум в 2 раза. Для предварительных расчетов мы увеличим в 3,3 раза, т.е. с запасом. Таким образом, мы имеем:
q1≅0,1 л/с.
Ввиду явной нелинейности характеристик динамики потока в зависимости от диаметра (d) шланга расчет приведем для мощности 10 кВт (т.е. q=10, q1=1 л/с) и диаметр примем заведомо меньшим
d=1 см=10-2 [см].
Кроме того:

Сначала проверим характер движения, вычислив число Re
 , где Ucp найдем из
, где Ucp найдем из  , т.е.
, т.е.

Отсюда:

Поскольку критическое значение числа Рейнольдса Reкр=2300, то Re>Reкр, т.е. движение турбулентное, и пользуемся формулой для турбулентного потока

Поскольку:  , а 1 [м2]=104 [см2], то
, а 1 [м2]=104 [см2], то 
то, преобразовав размерности, имеем:

Гидростатическое давление газа на высоте Н=200 м будет:

где γ удельный вес газа.
Таким образом, для поднятия газа на высоту Н=200 м потребуется избыточное давление: (ΔР)Σ=ΔРТ+ΔРГ.С.=0,1446 атм.
Вес шланга будет зависеть от соотношения плотности (ρ) и прочности [σ] материала, из которого изготовлен шланг. Эти параметры приведены ниже для разных материалов, из которых изготавливают шланги.
Таблица 5

Для ориентировочных расчетов возьмем самый простой из приведенных в таблице материал - полиэтилен:  ;
;  ;
;  .
.
Расчет показал, что при 20-кратном запасе, толщина стенки шланга равна δ=0,2 мм.
Отсюда масса 1 м шланга будет:

Вес всего шланга при Н=200 м будет: 
Можно оценить так называемую высоту самовыдерживания шланга из данного материала:
m=ρSH, а вес P=γSH; 
Откуда: 
Таким образом, на высоте Н=200 м данный материал использует только пятую часть своей прочности. Расчеты на прочность от других видов нагрузок необходимо вести исходя из оставшейся 4/5-части, т.е. из 0,8 [σ].
Аналогичная характеристика для других материалов приведена ниже
Таблица 6



Следует отметить, что (ΔРT) - это результат трения газа о стенки шланга, которое направлено по направлению подачи газа, т.е. вверх. В результате вес шланга уменьшается на величину:

Кроме того, на шланг, наполненный газом, действует сила Архимеда и к весу шланга добавляется вес газа. Эти два обстоятельства добавляют к весу шланга величину

Таким образом, эффективный вес шланга, строго говоря, будет:
(mg)эфф=(mg)Z-(ΔРТ)Sш+(Δm)g=1,26-0,082+0,016=1,194 кг.
Проверяем этот результат по более простой, ламинарной формуле:

В случае использования в качестве газообразного рабочего тела сжатого воздуха можно реализовать указанный выше запас прочности шланга, что является необходимым для преобразования энергии статического давления газа в шланге в энергию реактивной струи воздуха на выходе сопла по аналогии, в простейшем случае, с Сегнеровым колесом в гидродинамике.
Таким образом, применением предлагаемых изобретений достигается технический результат, заключающийся в расширении функциональных возможностей способа обеспечения навигации и повышении надежности навигации воздушных платформ телекоммуникационной информационной сети за счет повышения грозозащищенности и климатической устойчивости канала подачи энергии питания двигателей тягового винта и приборов воздушных платформ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
| СПОСОБ ФОРМИРОВАНИЯ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ВЫСОТНАЯ ВИНТОКРЫЛАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2319319C1 |
| СПОСОБ ПОДЪЕМА НА ЗАДАННУЮ ВЫСОТУ И ОБЕСПЕЧЕНИЯ НАВИГАЦИИ ВИНТОКРЫЛОЙ ПЛАТФОРМЫ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315955C1 |
| Привязная мониторинговая платформа с системой питания | 2019 |
|
RU2724509C1 |
| Привязная территориально распределенная воздушная система технического наблюдения | 2024 |
|
RU2828468C1 |
| Способ электропитания бортовой аппаратуры высотной привязной платформы, построенной беспилотным летательным аппаратом | 2024 |
|
RU2841215C1 |
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2651305C1 |
| МНОГОРАЗОВАЯ ВОЗДУШНО-КОСМИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2164882C1 |
| Способ непрерывной высотной телекоммутационной связи | 2019 |
|
RU2715420C1 |
| СПОСОБ ВОЗДУШНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 2007 |
|
RU2356786C1 |
Изобретения относятся к средствам обеспечения навигации воздушных платформ, используемых для формирования беспроводных сетей передачи информации по линии прямой видимости в заданной географической области. Изобретения направлены на повышение надежности навигации воздушных платформ за счет повышения грозозащищенности и климатической устойчивости канала подачи энергии питания двигателей вращения тягового винта и приборов воздушных платформ. Способ обеспечения навигации привязных воздушных платформ беспроводных сетей передачи информации включает создание подъемной силы летательного аппарата для размещения связанной с ним платформы на заданной высоте и удержание летательного аппарата и платформы в заданной точке поверхности гибкой тягой, используемой в качестве канала подачи энергии питания для создания вектора тяги подъемной силы летательного аппарата. Согласно изобретению в качестве энергоносителя для создания энергии питания используют газообразное рабочее тело, которое под давлением закачивают в канал подачи энергии питания гибкой тяги, а на выходе этого канала преобразуют энергию газообразного рабочего тела в энергию создания подъемной силы летательного аппарата. Для создания подъемной силы летательного аппарата могут энергию газообразного рабочего тела в виде горючего или природного газа на выходе канала подачи энергии питания преобразовывать в электрическую мощность или в реактивную тягу. Согласно первому варианту выполнения привязной воздушной платформы в приборном отсеке воздушной платформы устанавливают, по меньшей мере, один топливный элемент преобразования энергии горючего или природного газа в электрическую энергию, а гибкую тягу выполняют с полым каналом, нижний конец которого сообщают с источником горючего или природного газа, а верхний - по меньшей мере, с одним топливным элементом, электрический выход которого связывают с входом электрического двигателя тягового винта. Согласно второму варианту выполнения привязной воздушной платформы гибкую тягу выполняют с полым каналом, нижний конец которого сообщают с источником горючего или природного газа или сжатого воздуха, а верхний с двигателем вращения тягового винта, выполненным в виде реактивного движителя, который могут выполнять в виде прямоточного реактивного двигателя с элементом зажигания горючего или природного газа, или в виде преобразователя давления сжатого воздуха во вращательное движение тягового винта. 3 н. и 4 з.п. ф-лы, 2 ил., 6 табл.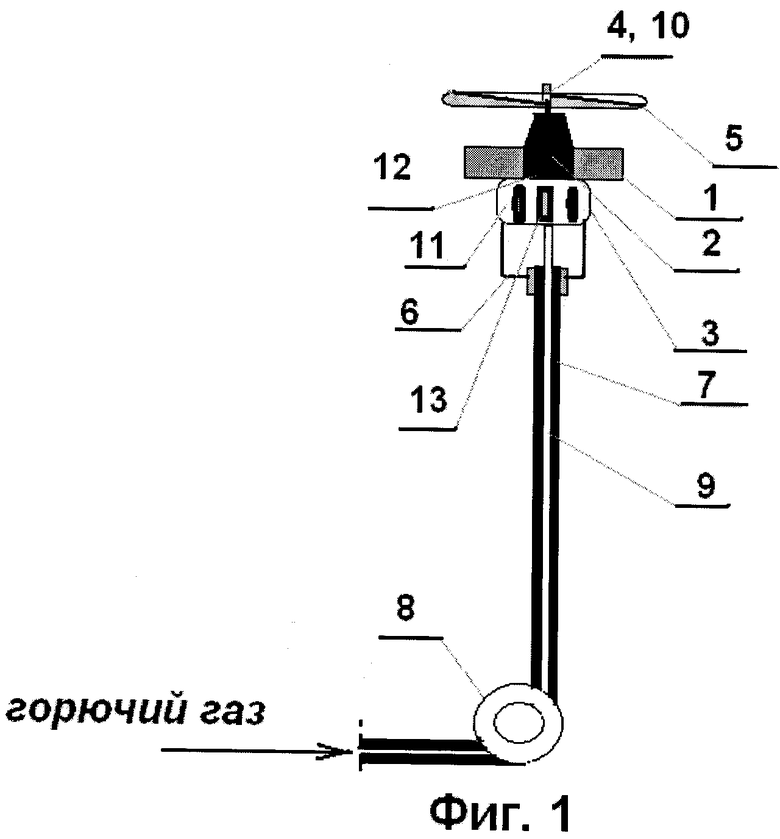
| СОВОКУПНОСТЬ ВОЗДУШНЫХ ПЛАТФОРМ СВЯЗИ И СПОСОБ ИХ ИСПОЛЬЗОВАНИЯ | 2000 |
|
RU2257016C2 |
| АЭРОДИНАМИЧЕСКАЯ ИНТЕГРАЛЬНАЯ СИСТЕМА ТЕЛЕКОММУНИКАЦИЙ | 2001 |
|
RU2180767C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2176852C2 |
| АВТОНОМНЫЙ ПРИВЯЗНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА МЕСТНОСТЬЮ | 1998 |
|
RU2159199C2 |
| 0 |
|
SU152453A1 | |
| CN 1075928 A, 08.09.1993 | |||
| US 2003040273 A, 27.02.2003. | |||

