Предлагаемое изобретение относится к средствам обеспечения навигации воздушных платформ, используемых для формирования беспроводных сетей передачи информации по линии прямой видимости в заданной географической области.
Беспроводные широкополосные сети практически находятся вне конкуренции по оперативности развертывания для географических областей, в которых большая территория сочетается с невысокой плотностью населения, широкополосные беспроводные решения имеют особое значение, так как позволяют экономично и оперативно создавать телекоммуникационную инфраструктуру на обширных территориях.
Использование воздушных платформ обеспечивает телекоммуникационное покрытие больших географических регионов. Одновременно с созданием региональных сетей передачи данных, голоса и видеоинформации высотные платформы могут применяться для целей видеонаблюдения в радиусе 70-80 км (например, в приграничных территориях или наблюдения транспортных потоков), обнаружения лесных пожаров, экологического мониторинга с использованием сенсорных сетей, геологической и геофизических разведок, радиологического контроля и т.д.
Продолжительность навигации при использовании высотных платформ региональных сетей на высотах до 1 км в естественных условиях окружающей среды на открытых пространствах обуславливает первоочередность задачи обеспечения надежности эксплуатации и управления воздушными платформами, в том числе доступность и дешевизну энергетических ресурсов питания их двигательных установок и приборной системы.
Одной из важнейших задач обеспечения навигации беспилотных летательных аппаратов при их использовании в промышленных масштабах является оптимизация количества ступеней преобразования доступных энергетических ресурсов в вертикальную составляющую тяги летательного аппарата.
Известно использование вертолетных винтов, например, в беспилотном вертолете немецкой фирмы «Domier» DO-32K "Kibitz", в котором два турбокомпрессорных двигателя «холодного цикла» служат для создания подъемной тяги несущего винта. Однако турбореактивные двигатели работают на жидком топливе (керосине, бензине), который подается под большим давлением и обеспечивает работоспособность системы в течение относительно небольшого времени эксплуатации. Из-за гидростатического давления жидкости шланг становится толстостенным, а значит и тяжелым (тем более вместе с жидкостью), что неприменимо в случае длительного использования летательного аппарата для навигации воздушных платформ систем беспроводной связи. Размещение турбореактивных двигателей на летательном аппарате уменьшает полезный вес необходимой аппаратуры воздушной платформы.
Известно использование гибкого вала для передачи крутящего момента (патент РФ №2197403, публ. 2003.01.27) в трансмиссии системы управления двухсекционного сочлененного вездеходного транспортного средства. Известен гибкий вал из композиционного материла (патент РФ №2146019, публ. 2000.02.27) и гибкий вал, содержащий средство передачи крутящего момента и жестко соединенную с последним концевую арматуру, в котором средство передачи крутящего момента выполнено в виде цилиндра, образованного переплетением пучков проволоки круглого сечения таким образом, что каждый последующий пучок огибает предыдущий в противоположном направлении (заявка на патент РФ №95106132, публ. 1996.11.27). Известен гибкий вал, выполненный в виде стержня или трубы из гибкого материала, с которой соединен и взаимодействует упругий каркас, состоящий из цилиндрической пружины, неподвижно соединенной по торцам с двумя втулками и расположенными в отверстии вала гибкими продольными стержнями, соединенными с втулками. Известный гибкий вал имеет достаточно сложную конструкцию, его трудно собирать. Все это снижает надежность известного гибкого вала (патент РФ №2097611, публ. 1998).
Известны специальные формы выполнения гибкого вала, например, содержащего гибкую оболочку и расположенное в ней рабочее тело, которое представляет собой засыпку плотно уложенного сыпучего материала, при этом гибкая оболочка выполнена в виде трубки из гибкого материала, армированного в массе сеточным каркасом из гибких нитей, с углом навивки нитей каркаса к образующей цилиндрической поверхности оболочки, составляющим 45±5°, а частицы сыпучего материала имеют шарообразную форму с калиброванным диаметром, лежащим в диапазоне не менее 100 мкм и не более 1/5 от внутреннего диаметра гибкой оболочки, гибкие нити изготовлены из шелка или капрона, или углепластика, при этом внутренняя полость гибкой оболочки заполнена смазкой и герметизирована, а максимальная шероховатость поверхности частиц сыпучего материала засыпки не превышает 12,5 мкм (патент РФ №2256825. публ. 2005.07.20).
Все указанные выше формы выполнения гибкого вала, при всех специфических недостатках имеют также общие, а именно, невысокая надежность из-за их сложности и относительно небольшая протяженность при относительно большом весе, что не позволяет использовать эти технические решения для обеспечения подъема и навигации воздушных платформ.
Наиболее близкими аналогами являются способ формирования региональных беспроводных сетей передачи информации, реализованный в телекоммутационной воздушной платформе (патент РФ №52296 на полезную модель, опубл. 10.03.06 г.). Особенность способа формирования региональных беспроводных сетей передачи информации, включающего размещенние воздушных телекоммутационных платформ на заданных высотах путем создания подъемной силы для их удержания в заданных точках региональной сети географического региона и стабилизацию положения платформ в этих точках, заключается в том, что подъемную силу для каждой платформы создают с помощью дистанционно и/или автономно пилотируемого винтокрылого летательного аппарата за счет вертикальной составляющей вектора тяги его винта, а удержание этого летательного аппарата и платформы в заданной точке региональной сети географического региона осуществляют, связывая их с заданной точкой поверхности географического региона гибкой тягой, которую используют в качестве канала подачи энергии питания для обеспечения вращения винта летательного аппарата. Подъем платформы осуществляют, раскручивая винт внизу на поверхности, а при достижении заданной высоты необходимый крутящий момент вращения винта создается двигателем летательного аппарата. Стабилизацию положения платформы обеспечивают за счет инерциальной навигации летательного аппарата в заданной точке региональной сети географического региона.
Недостатком указанного технического решения является то, что использование гибкой тяги с каналом подачи энергии питания предполагает необходимость использования преобразователей энергии питания в крутящий момент вращения винта летательного аппарата, размещенных на заданной высоте навигации платформы, что снижает ее полезную нагрузку.
Технический результат предлагаемого изобретения заключается в расширении функциональных возможностей и повышении надежности подъема и навигации воздушных платформ телекоммуникационной информационной сети за счет упрощения аппаратурной реализации технического решения.
Указанный технический результат достигается в способе подъема на заданную высоту и обеспечения навигации воздушной платформы беспроводной сети передачи информации, включающем создание подъемной силы винтокрылого летательного аппарата, подъем связанной с ним платформы беспроводной сети передачи информации на заданную высоту и удержание летательного аппарата и платформы в заданной точке поверхности географического региона гибкой тягой, тем, что в качестве гибкой тяги используют размещенный в цилиндрической оболочке гибкий торсион с длиной не менее заданной высоты размещения платформы, при этом сначала жестко закрепляют один конец торсиона на осевом элементе вращения винта летательного аппарата и сообщают посредством торсиона винту необходимый крутящий момент для создания подъемной силы летательного аппарата, после подъема платформы на заданную высоту фиксируют второй конец торсиона на выходном валу источника крутящего момента, а в процессе навигации платформы необходимый крутящий момент винту летательного аппарата сообщают посредством этого торсиона.
Кроме того, в качестве гибкого торсиона могут использовать трос из синтетического материала, например лавсана.
Указанный технический результат в устройстве для подъема на заданную высоту и обеспечения навигации воздушной платформы беспроводной сети передачи информации, содержащем станцию приема и передачи сигналов в заданном географическом регионе, связанную с летательным аппаратом, имеющим тяговый винт и связанным с гибкой тягой, второй конец которой зафиксирован с возможностью изменения длины тяги в заданной точке поверхности географического региона, достигается тем, что в него введены полый корпус с двумя взаимно перпендикулярными отверстиями и замыкатель цепи передачи крутящего момента, установленный в полости корпуса с возможностью осевого перемещения и вращения относительно вертикали, при этом гибкая тяга выполнена в виде размещенного в цилиндрической оболочке гибкого торсиона, верхний конец которого жестко связан с цапфой тягового винта, а нижний - снабжен полумуфтой, выполненной с элементом зацепления для связи с источником крутящего момента, причем гибкая тяга протянута через взаимно перпендикулярные отверстия корпуса, а замыкатель цепи передачи крутящего момента имеет элементы для зацепления с указанной полумуфтой и источником крутящего момента.
Изобретение поясняется чертежами.
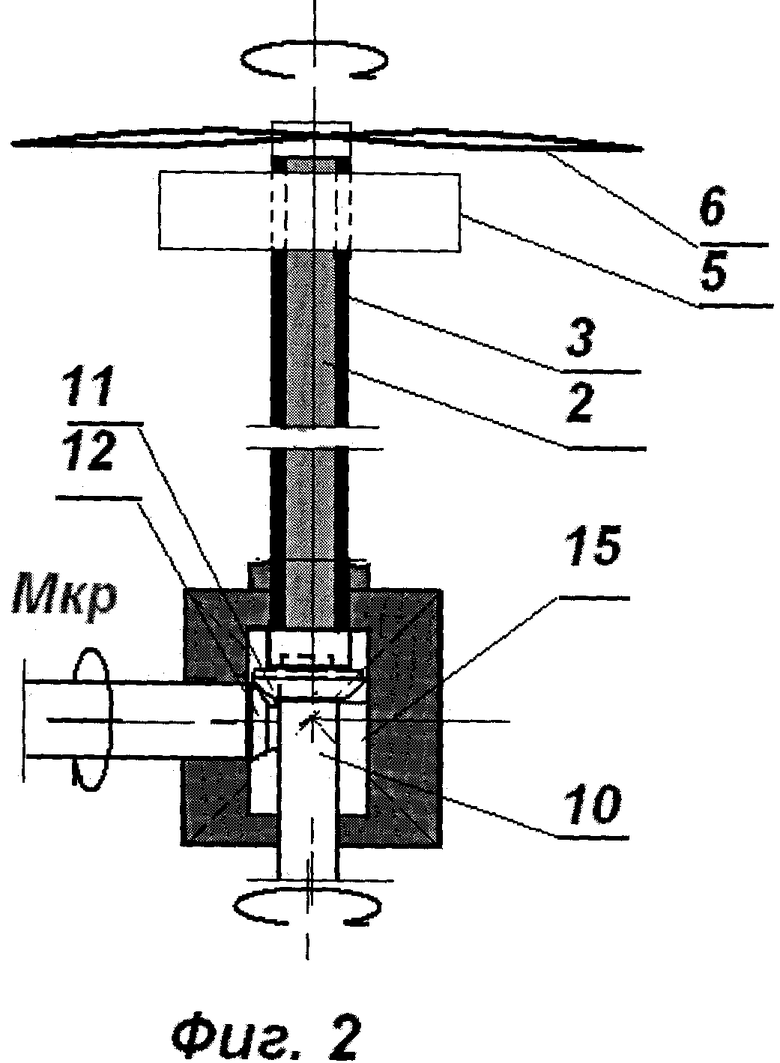
На фиг.1 показана конструктивная схема, иллюстрирующая предлагаемые технические решения на начальном этапе подъема воздушной платформы.
На фиг.2 - конструктивная схема, иллюстрирующая предлагаемые технические решения на этапе навигации воздушной платформы.
Устройство для подъема на заданную высоту и обеспечения навигации винтокрылой платформы содержит корпус 1, в котором выполнены два взаимно перпендикулярных отверстия, через которые проходят цилиндрическая оболочка 3 и размещенный в ней с возможностью осевого вращения гибкий торсион 2. В дополнительном отверстии корпуса в его полости 15 установлен на валу 10 замыкатель 4 с возможностью вертикального перемещения вдоль полости и осевого вращения вокруг вертикальной оси. Первый (верхний) торец торсиона жестко связан с цапфой винта 6 летательного аппарата 7, несущего станцию 5 приема и передачи сигналов в заданном географическом регионе винтокрылой платформы. Замыкатель 4 имеет торцевой элемент 8 (например, шлицевый) для передачи крутящего момента, а второй (нижний) конец торсиона 2 жестко связан с полумуфтой 9, имеющей торцевой элемент для приема крутящего момента. Кроме того, замыкатель 4 и выходной вал 13 двигателя (источника крутящего момента) выполнены с элементами, соответственно, 11 и 12 передачи крутящего момента во взаимно перпендикулярных направлениях (например, конической зубчатой передачи). Выходной вал 13 также имеет торцевой элемент (не показан), для непосредственной передачи крутящего момента полумуфте 9 торсиона, аналогичный торцевому элементу 8 замыкателя.
Станция приема и передачи сигналов в заданном географическом регионе выполнена в виде базовой станции системы беспроводного широкополосного доступа и может также содержать (не показаны) аккумуляторную батарею, преобразователи напряжения, вторичные источники питания, видеокамеру наблюдения.
Работа устройства осуществляется следующим образом.
В процессе подъема (фиг.1) крутящий момент передается по цепи от вала 13 двигателя (источника крутящего момента) на винт 6 через элементы зацепления выходного вала и полумуфты 9, жесткую связь полумуфты и первого конца гибкого торсиона 2, торсион, жесткую связь второго (верхнего) конца гибкого торсиона с цапфой винта 6. Подъемная сила создается воздушным тяговым винтом 6 и под ее действием винтокрылая платформа с летательным аппаратом и станция приема и передачи сигналов поднимаются на заданную высоту навигации. При этом гибкий торсион с оболочкой протягиваются подъемной силой через горизонтальное и вертикальное отверстия корпуса, а источник крутящего момента находится в постоянном контакте с торсионом. При достижении платформой заданной высоты выходной вал источника крутящего момента и полумуфта размыкаются, а замыкатель перемещается вертикально вверх, входит в зацепление в вертикальном направлении с полумуфтой, повернувшейся на 90° в вертикальной плоскости под действием подъемной силы, и в горизонтальном направлении - с валом двигателя (источника крутящего момента) посредством элементов 11 и 12 передачи крутящего момента во взаимно перпендикулярных направлениях (конической зубчатой передачи). В процессе навигации (фиг.2) платформы необходимый винту летательного аппарата крутящий момент передается по цепи от вала 13 двигателя (источника крутящего момента) на винт 6 через элементы 11 и 12 конической зубчатой передачи, шлицевые торцевые элементы замыкателя 4 и полумуфты 9, жесткую связь полумуфты и первого конца гибкого торсиона 2, торсион, жесткую связь второго (верхнего) конца гибкого торсиона с цапфой винта 6.
Передаваемая мощность в этом случае будет:
Р=Мкр·ω.
Особенностью является то обстоятельство, что торсион должен быть гибким, т.к. на начальном этапе вся длина торсиона располагается горизонтально, а на конечном вертикально. В этом случае выгодно делать торсион более гибким, увеличивая угловую скорость (ω), уменьшая (Мкр), сохраняя заданную мощность (Р). Однако угловые скорости вертолетных винтов невелики и прямая передача момента (без редукторов) может оказаться неэффективной. Применение редукторов оказывается эффективным средством передачи механической мощности, но возрастают (многократно) проблемы с моментом. Дело в том, что кроме передачи вращающегося момента на винт, с ростом (ω) возрастают проблемы с моментом трения. Особенно это сказывается в точке перегиба торсиона по радиусу (R), где торсион необходимо помещать в так называемую «рубашку». Трение же в рубашке можно рассчитать следующим образом
где ϑ=Uср,
τ - напряжение трения,
dn=δ - зазор.
Формула размерности:
Момент сопротивления вращению (т.е. трения):
МТ=FТ·r; FT=τ·S, где S - площадь поверхности торсиона, одетого в «рубашку», r - радиус торсиона. Тогда имеем:

Оценим этот момент в цифрах при r=1[мм]=10-3 [мм] (d=2·10-3 [м])
 l≅2[м]; δ=0,1[мм]=10-4[м];
l≅2[м]; δ=0,1[мм]=10-4[м]; 

Теперь можно оценить напряжение в торсионе, если мы будем передавать мощность 
При 

Т.е. трение на данной угловой скорости можно не учитывать, т.к. М>>МT.
Для расчета на прочность торсиона (τмор) мы имеем:
 , откуда:
, откуда:

Необходимо снизить (τ) примерно в 500 раз. Проще всего это можно сделать, увеличивая (d) примерно в  .
.
Это означает, что d≅16 мм, а вес 1 м такого троса из лавсана будет:

При Н=100 м; (mg)л.10=2,83[кг], при весе платформы 50 кг - это составит 5,7% от ее веса.
При Н=200 м (mg)л.10=5,66 [кг], что составит ˜11,4% ее веса.
Эти показатели можно улучшить, если применить в качестве торсиона не сплошной диаметр, а трубу. Соотношение диаметров трубы ⊘D и ⊘d выбирается экспериментально из расчета, чтобы при наложении на радиус R эта труба не складывалась. Двигатель в этом случае находится на Земле и вес его не имеет принципиального значения.
Вес оболочки будет зависеть от соотношения плотности (ρ) и прочности [σ] материала, из которого изготовлена оболочка. Эти параметры приведены в табл.1 для разных материалов, из которых изготавливают шланги.
Таблица 1


Для ориентировочных расчетов возьмем самый простой из приведенных в таблице 1 материал - полиэтилен:  ;
;  ;
;  .
.
Расчет показал, что при 20-ти кратном запасе, толщина стенки шланга равна δ=0,2 мм.
Отсюда масса 1 м шланга будет:

Вес всего шланга при Н=200 м будет: 
Можно оценить так называемую высоту самовыдерживания шланга из данного материала:
m=ρSH, а вес P=γSH; 
Откуда: 
Таким образом, на высоте Н=200 м данный материал использует только пятую часть своей прочности. Расчеты на прочность от других видов нагрузок необходимо вести исходя из оставшейся 4/5-части, т.е. из 0,8[σ].
Аналогичная характеристика для других материалов приведена в табл.2.
Таблица 2



Таким образом, применением предлагаемого изобретения достигается технический результат, заключающийся в расширении функциональных возможностей и повышении надежности подъема и навигации воздушных платформ телекоммуникационной информационной сети за счет упрощения аппаратурной реализации технического решения.
Изобретение относится к средствам обеспечения навигации воздушных платформ, используемых для формирования беспроводных сетей передачи информации по линии прямой видимости в заданной географической области, Изобретение направлено на повышение надежности навигации воздушных платформ за счет упрощения аппаратурной реализации технического решения. Этот результат обеспечивается за счет того, что способ подъема на заданную высоту и обеспечения навигации воздушной платформы беспроводной сети передачи информации включает создание подъемной силы винтокрылого летательного аппарата, подъем связанной с ним платформы беспроводной сети передачи информации на заданную высоту и удержание летательного аппарата и платформы в заданной точке поверхности географического региона гибкой тягой, причем в качестве гибкой тяги используют размещенный в цилиндрической оболочке гибкий торсион с длиной не менее заданной высоты размещения платформы, при этом сначала жестко закрепляют один конец торсиона на осевом элементе вращения винта летательного аппарата и сообщают посредством торсиона винту необходимый крутящий момент для создания подъемной силы летательного аппарата, после подъема платформы на заданную высоту фиксируют второй конец торсиона на выходном валу источника крутящего момента, а в процессе навигации платформы необходимый крутящий момент винту летательного аппарата сообщают посредством этого торсиона. Согласно изобретению в устройство для подъема на заданную высоту и обеспечения навигации воздушной платформы беспроводной сети передачи информации введены полый корпус с двумя взаимно перпендикулярными отверстиями и замыкатель цепи передачи крутящего момента, установленный в полости корпуса с возможностью осевого перемещения и вращения относительно вертикали, при этом гибкая тяга выполнена в виде размещенного в цилиндрической оболочке гибкого торсиона, верхний конец которого жестко связан с цапфой тягового винта, а нижний - снабжен полумуфтой, выполненной с элементом зацепления для связи с источником крутящего момента, причем гибкая тяга протянута через взаимно перпендикулярные отверстия корпуса, а замыкатель цепи передачи крутящего момента имеет внешние зубья шлицевой передачи для зацепления с источником крутящего момента, имеющим зубья конической передачи. 2 н. и 1 з.п. ф-лы, 2 ил., 2 табл.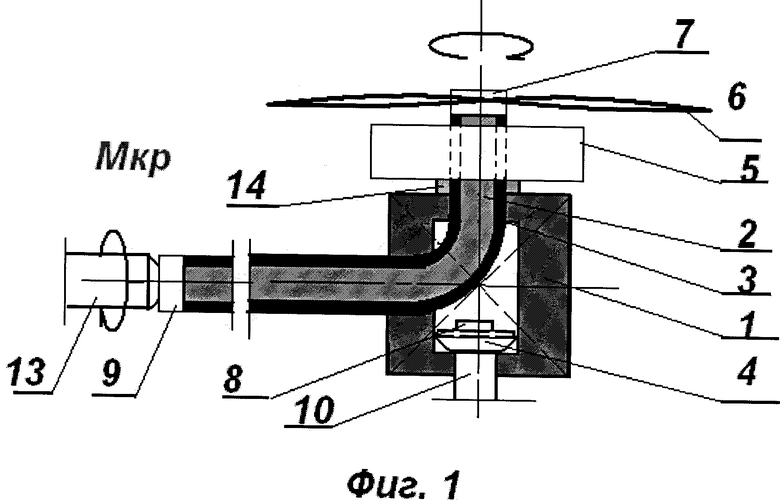
| СОВОКУПНОСТЬ ВОЗДУШНЫХ ПЛАТФОРМ СВЯЗИ И СПОСОБ ИХ ИСПОЛЬЗОВАНИЯ | 2000 |
|
RU2257016C2 |
| АЭРОДИНАМИЧЕСКАЯ ИНТЕГРАЛЬНАЯ СИСТЕМА ТЕЛЕКОММУНИКАЦИЙ | 2001 |
|
RU2180767C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2176852C2 |
| АВТОНОМНЫЙ ПРИВЯЗНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА МЕСТНОСТЬЮ | 1998 |
|
RU2159199C2 |
| 0 |
|
SU152453A1 | |
| CN 1075928 A, 08.09.1993 | |||
| US 2003040273 A, 27.02.2003. | |||

