Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам и комплексам в области военной, специальной техники и систем мониторинга окружающей среды и объектов, предназначенной для дистанционной и стационарной работы в опасных зонах химического, биологического и радиационного заражения.
Известен способ обеспечения навигации привязных воздушных платформ беспроводных сетей передачи информации и привязная воздушная платформа для его реализации. Привязная воздушная платформа для реализации обеспечения навигации и беспроводных сетей передачи информации включает создание подъемной силы летательного аппарата для размещения связанной с ним платформы на заданной высоте и удержание летательного аппарата и платформы в заданной точке поверхности гибкой тягой, используемой в качестве канала подачи энергии питания для создания вектора тяги подъемной силы летательного аппарата. Согласно изобретению, в качестве энергоносителя для создания энергии питания используют газообразное рабочее тело, которое под давлением закачивают в канал подачи энергии питания гибкой тяги, а на выходе этого канала преобразуют энергию газообразного рабочего тела в виде горючего или природного газа на выходе канала подачи энергии питания преобразовывать в электрическую мощность или в реактивную тягу. Согласно первому варианту выполнения привязной воздушной платформы в приборном отсеке воздушной платформы устанавливают, по меньшей мере, один топливный элемент преобразования энергии горючего или природного газа в электрическую энергию, а гибкую тягу выполняют с полым каналом, нижний конец которого сообщают с источником горючего или природного газа, а верхний по меньшей мере, с одним топливным элементом, электрический выход которого связывают с входом электрического двигателя тягового винта.
Согласно второму варианту выполнения привязной воздушной платформы гибкую тягу выполняют полым каналом, нижний конец которого сообщают с источником горючего или природного газа или сжатого воздуха, а верхний с двигателем вращения тягового винта, выполненным в виде реактивного движителя, которые могут выполнять в виде прямоточного реактивного двигателя с элементом зажигания горючего или природного газа, или в виде преобразователя давления сжатого воздуха во вращательное движение тягового винта [1].
Недостатками известной привязной воздушной платформы для беспроводных сетей передачи информации являются:
- громоздкость, сложность и высокая стоимость обслуживания конструкции, из-за использования движителей с редуктором или прямоточных реактивных двигателей,
- использование для создания подъемной силы летательного аппарата энергию газообразного рабочего тела в виде горючего или природного газа, что обуславливает большой вес канала подачи энергии гибкой тяги, тем самым снижая массу полезной нагрузки, подъем которой может обеспечить движители привязной воздушной платформы,
- использование преобразователя энергии газообразного рабочего тела в виде горючего или природного газа в электрическую энергию на борту привязной воздушной платформы приводит к увеличению габаритов и массы привязной воздушной платформы и к снижению ее мобильности и оперативности подготовки для использования,
- отсутствие на борту привязной воздушной платформы аварийной системы посадки, позволяющей в случае прекращения подачи питания для работы движителей осуществить аварийную посадку платформы,
Предлагаемое техническое решение позволяет решить недостатки, присущие системе питания с газообразным рабочим телом за счет передачи на борт платформы электроэнергии. Известна система питания платформы на переменном напряжении высокой (80 кГц и выше) частоты. [2]. Однако недостатком данной системы является наличие волновых процессов в линии, заключающихся в возникновении отраженной волны, что приводит к повышению (до удвоения) напряжения на некоторых участках линии. Данное явление может привести к пробою изоляции провода и возникновению короткого замыкания. Поэтому для питания привязной мониторинговой платформы предлагается использовать постоянное напряжение. Известен способ электроснабжения низковольтных потребителей электроэнергии постоянного тока, удаленных от источников электроэнергии [3], который взят за прототип. Отличием предлагаемой системы питания привязной мониторинговой платформы является то, что в наземном модуле имеется автономный источник питания с выходным напряжением повышенного уровня (порядка 500 В), а на борту платформы установлены преобразователи высокого входного напряжения в напряжение питания оборудования (12-24 В).
В основу изобретения поставлена техническая задача усовершенствования конструкции привязной мониторинговой платформы для уменьшения громоздкости, повышения мобильности, снижение времени от подготовки до готовности к запуску, оборудование платформы системой аварийной посадки, создание эффективной системы питания привязной мониторинговой платформы, снижение электромагнитных помех в канале связи.
Поставленная техническая задача решается тем, что привязная мониторинговая платформа содержит четыре и более бесщеточных или бесколлекторных электродвигателя с тяговыми винтами, автономную питающую электрическую станцию с выходным постоянным напряжением повышенного уровня с лебедкой, с питающим, оптоволоконным, кевларовым кабелями и системой автоматического контроля натяжения кабеля, аккумуляторную батарею аварийной посадки на борту, конверторы напряжения на борту, систему управления и стабилизации. Привязная мониторинговая платформа включает несущую раму из углеволокна, позволяющую снизить общий вес привязной мониторинговой платформы, с закрепленными на ней электродвигателями с тяговыми винтами; систему аварийной посадки в случае прекращения подачи электроэнергии от основного источника, включающую в себя аварийную аккумуляторную батарею, включенную параллельно основному источнику питания через разделительный диод, обеспечивающую работу системы управления и электродвигателей с тяговыми винтами привязной мониторинговой платформы в течении необходимого для безопасной посадки времени; подвесы для крепления полезной нагрузки, что позволяет реализовать модульность привязной мониторинговой платформы для реализации возможности обнаружения токсичных химикатов, биологических и радиоактивных агентов, применения в системе мониторинга различных объектов, проведения фото- и видеосъемки, а также организации связи в ходе проведения аварийно-спасательных работ в условиях чрезвычайных ситуаций природного и техногенного характера; систему питания платформы, состоящая из автономного источника питания с генератором, преобразователя напряжения в постоянное напряжение повышенного уровня, лебедки, с системой автоматического натяжения, позволяющей безаварийно применять привязную мониторинговую платформу на различных высотах до 150-200 м, трос, состоящий из общего кожуха, в котором находятся питающий кабель, оптоволоконный кабель, для передачи информации результатов мониторинга и управляющих сигналов между наземным модулем (оператор) и привязной мониторинговой платформой, кевларовый кабель, обеспечивающий снятие нагрузки на разрыв с питающего и оптоволоконного кабелей в общем кожухе троса, находящиеся на борту платформы преобразователи постоянного напряжения высокого уровня в напряжение, необходимое для питания оборудования; система управления и стабилизации, позволяющая безаварийно эксплуатировать привязную мониторинговую платформу при различных условиях погоды.
Привязная мониторинговая платформа управляется с наземного модуля при помощи пульта управления как управляемая модель.
Грузоподъемность привязной мониторинговой платформы составляет 4-5 кг, что в свою очередь позволяет устанавливать на него различные блоки многоцелевого назначения. Передача информации и результатов мониторинга может осуществляться по оптоволоконному кабелю в составе троса лебедки в режиме реального времени и сохраняется на запоминающем устройстве, либо по радиоканалу в случае обрыва троса.
Посредством варьирования высоты подъема привязной мониторинговой платформы возможно решать задачи мониторинга объектов, ведения аэрофото-видео-съемки при подъеме до 150-200 метров, при решении задач применения газосигнализаторов для ведения мониторинга окружающей среды, определения химического, биологического и радиационного заражения - высота полета беспилотного летательного аппарата должна быть минимально возможной, что обеспечивается тем, что привязная мониторинговая платформа вертолетного типа. При осуществлении мониторинга объектов или окружающей среды и организации связи в районах чрезвычайных ситуаций привязная мониторинговая платформа имеет возможность долговременной автономной работы, руководствуясь данными системы глобального позиционирования.
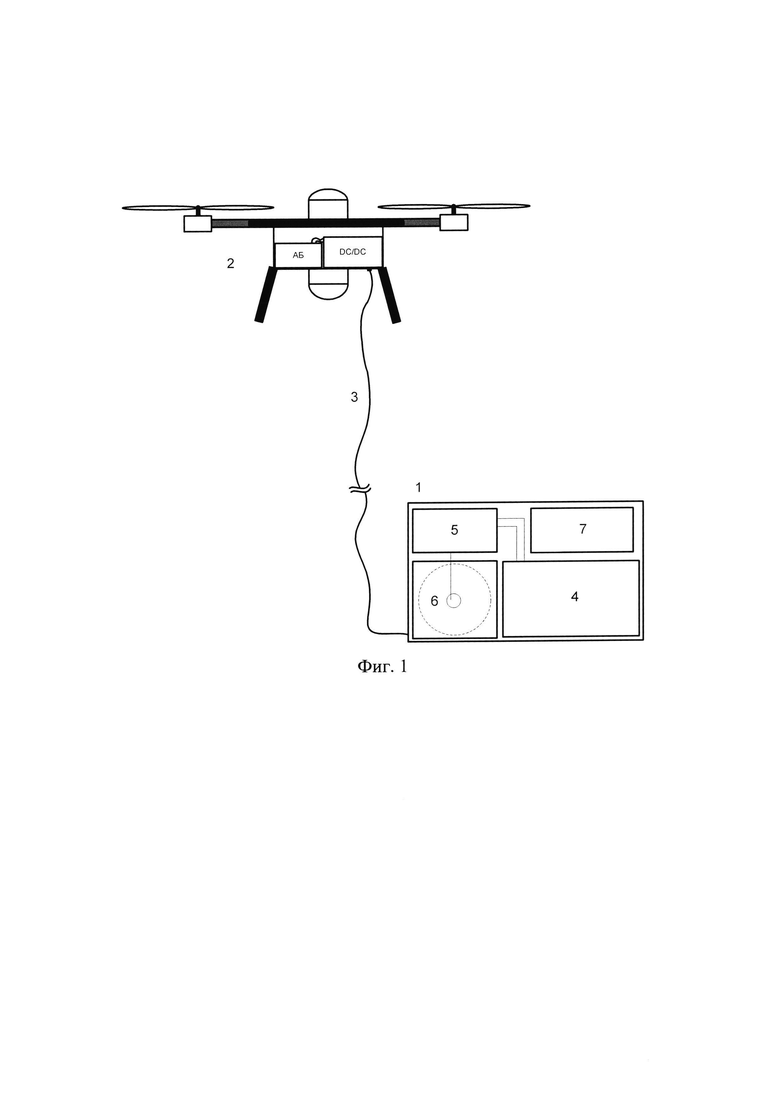
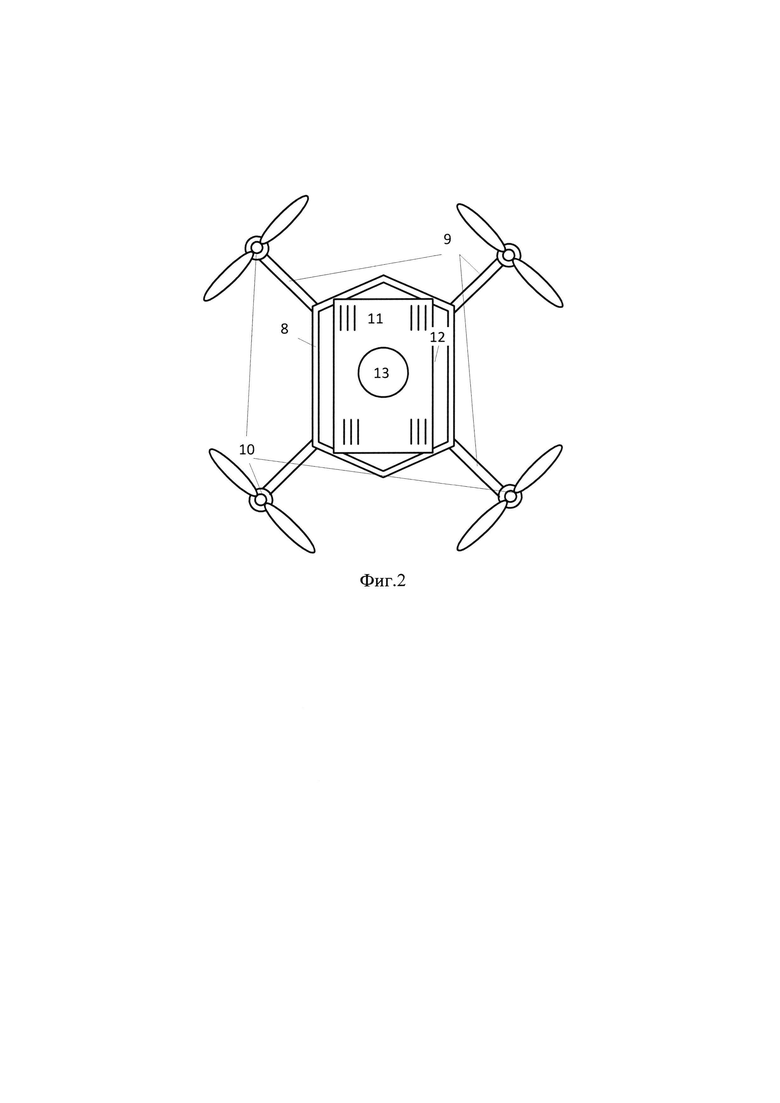
Конструктивно привязная мониторинговая платформа (фиг. 1) состоит из наземного модуля 1 и воздушного модуля 2, соединенных тросом 3. Наземный модуль 1 состоит из автономного источника питания 4, преобразователя 5 входного напряжения автономного источника питания или другого внешнего источника в постоянное напряжение повышенного уровня, лебедки 6 с питающим, оптоволоконным, кевларовым кабелями и системой автоматического контроля натяжения кабеля, панели управления и обработки информации 7. Воздушный модуль (фиг. 2) состоит из каркаса 1, выполненного в виде многоугольника в углах которого закреплены штанги 2, на противоположных сторонах, которых закреплены электродвигатели с тяговыми винтами 3, в центре каркаса закреплена несущая рама, выполненная из двух пластин верхней 4 и нижней 5 расположенных друг над другом, которые соединены между собой при помощи осей и содержащая места крепления полезной нагрузки 6 снаружи и системы питания, управления, резервную аккумуляторную батарею и полезную нагрузку внутри рамы.
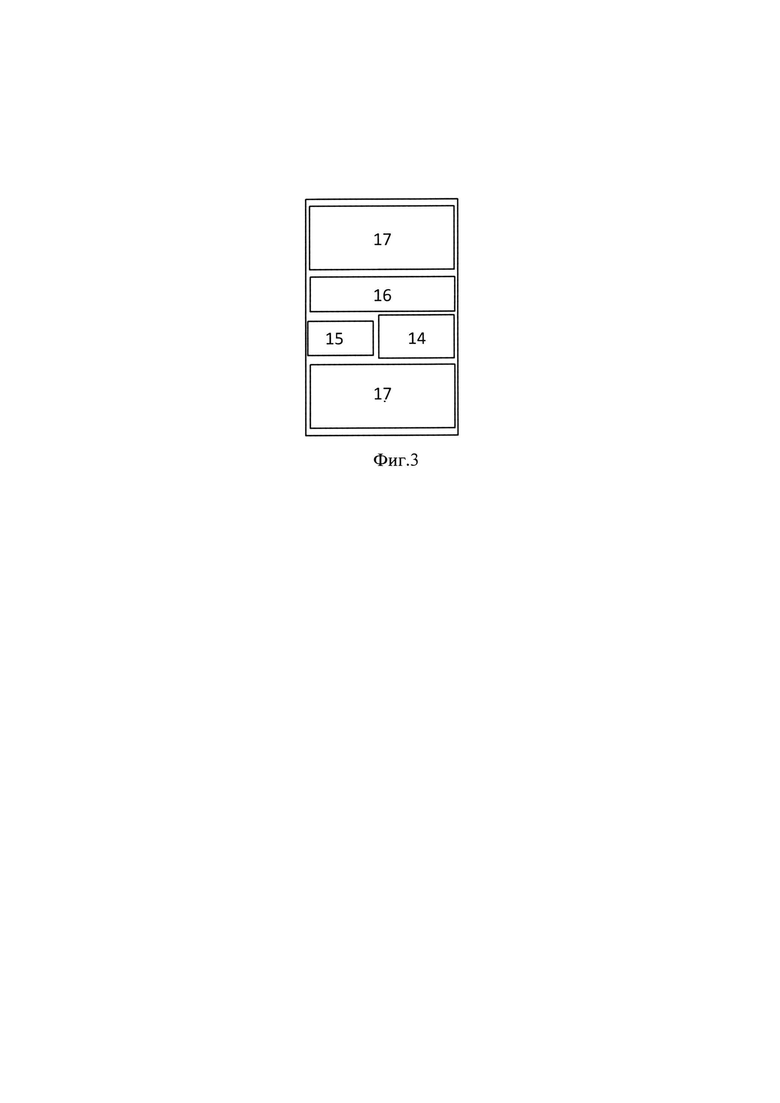
Вариант размещения полезной нагрузки на привязной мониторинговой платформе представлен на фиг. 3, где система питания, включающая преобразователь 1 постоянного напряжения повышенного уровня в напряжение питания оборудования платформы, резервная аккумуляторная батарея 2, система управления 3, полезная нагрузка 4.
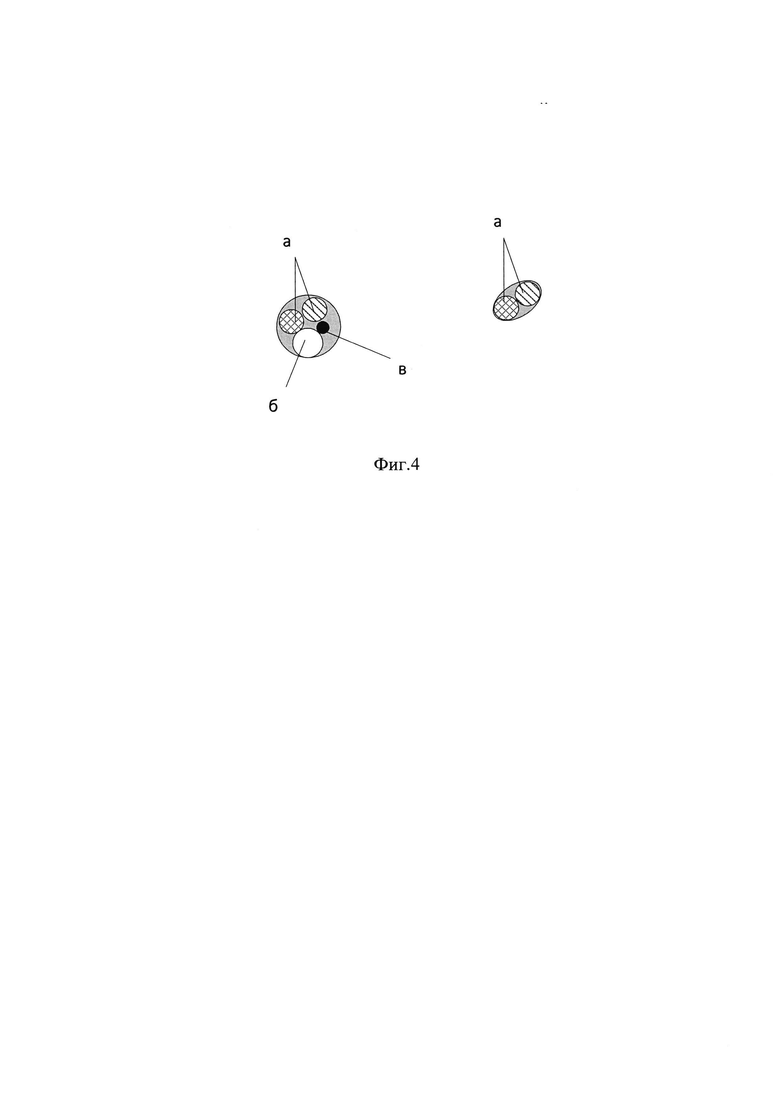
Варианты структуры троса привязной платформы представлены на фиг. 4, где 1 - питающий двухжильный кабель, 2 - оптоволоконный кабель передачи данных, 3 - кевларовый трос.
Предложенное техническое решение использует широкий спектр целевых нагрузок для целей ведения разведки, в том числе для выявления и оценки параметров радиационной и химической обстановки в заданном районе с привязкой к местности.
Таким образом, предлагаемый переносной беспилотный летательный аппарат многоцелевого назначения по сравнению с прототипом и другими техническими решениями аналогичного назначения позволит повысить надежность конструкции, достичь эффекта оперативности - сокращением времени развертывания беспилотного летательного аппарата, достичь расширения возможностей проведения работ по мониторингу обстановки и действий в зараженной зоне и выполнять задачи по воздушному фотографическому, телевизионному, тепловизионному контролю (в дневных и ночных условиях), комплексно одномоментно используя целевые нагрузки радиационной и химической разведки.
Источники информации:
1. Патент РФ, RU 2315954, 2006 г.
2. Вишневский В.М., Терещенко Б.Н. Разработка и исследование нового поколения высотных привязных телекоммуникационных платформ / Т-Comm, №7-2013, с. 20-24.
3. Патент РФ, RU 2337450, 2007 г.
Привязная мониторинговая платформа с системой питания на постоянном токе содержит гибкую тягу с возможностью изменения длины, станцию приема и передачи сигналов, четыре и более бесщеточных или бесколлекторных электродвигателя с тяговыми винтами, автономную питающую электрическую станцию с выходным постоянным напряжением повышенного уровня с лебедкой, питающим, оптоволоконным, кевларовым кабелями и системой автоматического контроля натяжения кабеля, аккумуляторную батарею аварийной посадки на борту, конверторы напряжения на борту, систему управления и стабилизации. Обеспечивается уменьшение громоздкости мониторинговой платформы, повышение мобильности, снижение времени от подготовки до готовности к запуску, возможность аварийной посадки, повышение эффективности системы питания, снижение электромагнитных помех в канале связи. 4 ил.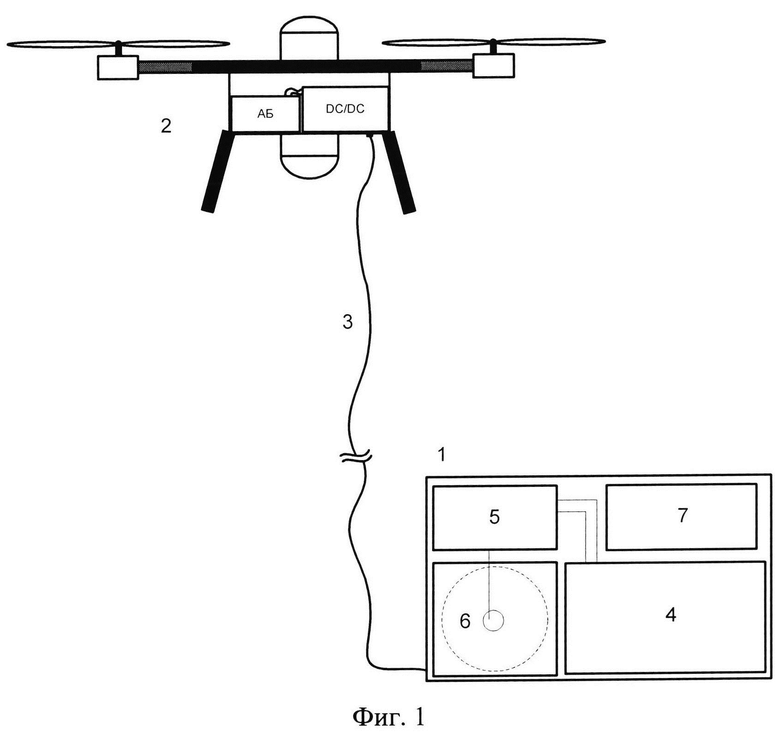
Привязная мониторинговая платформа с системой питания на постоянном токе, включающая гибкую тягу с возможностью изменения длины, станцию приема и передачи сигналов, отличающаяся тем, что содержит четыре и более бесщеточных или бесколлекторных электродвигателя с тяговыми винтами, автономную питающую электрическую станцию с выходным постоянным напряжением повышенного уровня с лебедкой, с питающим, оптоволоконным, кевларовым кабелями и системой автоматического контроля натяжения кабеля, аккумуляторную батарею аварийной посадки на борту, конверторы напряжения на борту, систему управления и стабилизации.
| WO 2018232010 A1, 20.12.2018 | |||
| WO 2013013219 A1, 24.01.2013 | |||
| РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС БОЕВОЙ МАШИНЫ | 2000 |
|
RU2272753C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |

