Изобретение относится к области машиностроения и может быть использовано в системах защиты и управления грузоподъемных машин для сбора, обработки, накопления и хранения оперативной и долговременной информации о параметрах их работы.
Известно устройство измерения и регистрации величины и времени работы грузоподъемной машины (крана), содержащее датчики усилий и угла наклоны стрелы, выходы которых подключены к суммирующему электродвигателю с редуктором, а также отдельный счетчик календарного времени [1].
Его недостатком являются ограниченные функциональные возможности, вызванные отсутствием регистрации нагрузки крана и пространственного положения его стрелы.
Известна система регистрации параметров работы грузоподъемной машины, содержащая цифровой вычислитель и подключенные к нему блок памяти и датчики параметров работы машины, причем вычислитель выполнен с возможностью подключения к нему устройства считывания.
Недостатком этой системы является отсутствие часов реального времени и, соответственно, пониженная информативность результатов регистрации параметров работы грузоподъемной машины [2].
Более совершенным и наиболее близким к предложенному является регистратор параметров грузоподъемной машины, содержащий отдельные датчики параметров ее работы, цифровой вычислитель, реализованный на основе микроконтроллера, а также часы реального времени с автономным источником питания и запоминающее устройство, подключенные к цифровому вычислителю, причем датчики подключены к цифровому вычислителю непосредственно или через согласующее устройство, а цифровой вычислитель выполнен с возможностью подключения к нему внешнего устройства считывания данных регистратора параметров посредством электрического соединителя или беспроводного устройства. Питание регистратора (за исключением часов реального времени) осуществляется от бортовой сети машины [3], [4].
Недостатком этого регистратора является невозможность регистрации и считывания параметров работы грузоподъемной машины при отсутствии напряжения в бортовой сети машины, а также при неисправности системы безопасности грузоподъемной машины, в состав которой входит этот регистратор. Соответственно, оператором или обслуживающим персоналом грузоподъемной машины этот регистратор умышленно или по неосторожности может быть выведен из рабочего состояния. Раздельное конструктивное исполнение датчиков цифрового вычислителя, соединенных посредством внешних линий связи, приводит к снижению надежности и к усложнению установки регистратора на грузоподъемную машину.
Техническими результатами, на достижение которых направлено предложенное техническое решение, являются:
- обеспечение непрерывной регистрации параметров работы грузоподъемной машины независимо от состояния ее электрооборудования, в том числе независимо от наличия напряжения в ее бортовой сети;
- обеспечение возможности считывания данных с регистратора параметров независимо от состояния электрооборудования грузоподъемной машины;
- исключение возможности умышленного или непреднамеренного отключения регистратора;
- повышение надежности регистратора путем исключения внешних линий связи.
- уменьшение размеров регистратора и упрощение его установки на грузоподъемную машину путем конструктивного объединения датчиков параметров ее работы и цифрового вычислителя.
В автономном регистраторе параметров грузоподъемной машины, содержащем датчики параметров ее работы, цифровой вычислитель, реализованный на основе микроконтроллера, часы реального времени с автономным источником питания и запоминающее устройство, подключенное к цифровому вычислителю или входящее в его состав, причем датчики параметров работы грузоподъемной машины подключены к микроконтроллеру цифрового вычислителя, который выполнен с возможностью приема и обработки сигналов с датчиков параметров работы грузоподъемной машины и их записи в запоминающее устройство, а также с возможностью записи в запоминающее устройство выходных сигналов часов реального времени, причем регистратор приспособлен для осуществления передачи информации из запоминающего устройства во внешнее устройство считывания и/или отображения этой информации на индикаторе, указанные технические результаты достигаются за счет того, что цепи питания составных частей регистратора, использующиеся для формирования и записи в запоминающее устройство указанных сигналов, подключены к автономному источнику питания.
Кроме того, для достижения этих технических результатов, в частности:
- датчики параметров работы грузоподъемной машины и цифровой вычислитель размещены в одной оболочке, которая может быть выполнена малогабаритной с возможностью скрытного размещения на машине;
- датчики параметров работы грузоподъемной машины включают в себя датчик нагрузки, выполненный в виде датчика усилия в грузовом или стреловом канате или в виде, по меньшей мере, одного датчика давления в гидроцилиндре подъема или поддержания стрелы;
- датчики параметров работы грузоподъемной машины включают в себя датчик угла наклона относительно гравитационной вертикали, прикрепленный к грузоподъемной машине с возможностью прямого или косвенного измерения угла наклона стрелы, а также, в случае необходимости, гироскоп;
- автономный источник питания выполнен в виде гальванического элемента, гальванической батареи или аккумулятора, оснащенного средством его подзарядки от солнечного элемента, от солнечной батареи, или от устройства преобразования энергии измеряемого параметра грузоподъемного крана в электрическую энергию, или от устройства преобразования энергии механических колебаний и/или ударов регистратора в электрическую энергию, или от внешнего источника питания. В качестве внешнего источника питания может использоваться источник питания внешнего устройства считывания;
- запоминающее устройство выполнено съемным с возможностью его подключения к внешнему устройству считывания или цифровой вычислитель содержит средство для проводной или беспроводной передачи информации из запоминающего устройства во внешнее устройство считывания;
- средство для проводной передачи информации из запоминающего устройства во внешнее устройство считывания, и это устройство считывания содержат аппаратные и программные средства для реализации одного из последовательных интерфейсов: USB, SPI, CAN, LIN, RS-232, RS-485, I2C или интерфейса карт энергонезависимой Flash-памяти, либо одного из беспроводных интерфейсов: Bluetooth, Wi-Fi, ZigBee, GSM, CDMA или IRDA.
- регистратор дополнительно содержит средства контроля напряжения автономного источника питания.
Приведенная совокупность отличительных признаков предложенного технического решения обеспечивает возможность сбора, обработки и хранение параметров работы грузоподъемной машины независимо от наличия и величины напряжения в бортовой сети машины и независимо от работоспособности ее системы защиты и управления. Одновременно исключается возможность вмешательства оператора и обслуживающего персонала машины в работу регистратора, что обеспечивает повышение надежности его работы. Моноблочное исполнение датчиков и цифрового вычислителя обеспечивает как дополнительное повышение надежности регистратора, так и упрощение его монтажа на машину. Поэтому эти признаки находятся в прямой причинно-следственной связи с достижением указанных технических результатов.
На чертеже приведена упрощенная функциональная схема регистратора.
Автономный регистратор параметров содержит цифровой вычислитель 1, реализованный на основе микроконтроллера 2, и подключенные к нему датчики 3 параметров работы грузоподъемной машины, запоминающее устройство 4, часы реального времени 5 и индикатор (например, ЖК дисплей) 6.
Датчики 3 подключены к микроконтроллеру 2 цифрового вычислителя 1 непосредственно или через дополнительное согласующее устройство 7.
Цепи питания всех составных частей регистратора, использующиеся для формирования и записи сигналов в запоминающее устройство 4, подключены к автономному источнику питания 8.
Микроконтроллер 2 соединен с интерфейсным устройством передачи данных 9 регистратора параметров во внешнее устройство считывания 10.
Датчики 3 параметров работы грузоподъемной машины и цифровой вычислитель 1 размещены в одной оболочке (в одном корпусе). Автономный регистратор, в случае его исполнения в малогабаритном корпусе, может быть размещен на грузоподъемной машине в скрытном месте, что затрудняет умышленное повреждение регистратора и, соответственно, повышает вероятность сохранения накопленных данных о параметрах работы грузоподъемной машины.
Эти датчики включают в себя, в частности, датчик нагрузки 11 грузоподъемной машины (датчик усилия или давления), датчик угла наклона 12, выполненный в виде микромеханического акселерометра-инклинометра с возможностью прямого или косвенного измерения угла наклона относительно гравитационной вертикали, и гироскоп 13.
В частности, автономный регистратор закреплен на стреловом канате стрелового грузоподъемного крана. Поскольку угол наклона стрелового каната взаимосвязан с углом наклона стрелы, датчик угла наклона (акселерометр) 12 формирует для микроконтроллера 2 сигнал, необходимый для определения текущего значения угла наклона стрелы. При этом датчик нагрузки 11, осуществляя измерение усилия в этом канате, передает в микроконтроллер 2 сигнал, необходимый и достаточный для определения нагрузки грузоподъемного крана. Одновременно гироскоп 13 формирует для микроконтроллера 2 сигналы, позволяющие определить линейные и угловые ускорения, скорости и перемещения той точки оборудования грузоподъемной машины (крана), к которой прикреплен регистратор, в том числе угол азимута грузоподъемного крана.
Автономный регистратор может быть закреплен также на стреле грузоподъемного крана. В этом случае датчик нагрузки 11, осуществляя контроль деформации участка стрелы между точками крапления регистратора, определяет нагрузку грузоподъемного крана, а датчик угла наклона 12 и гироскоп 13 - пространственное положение стрелы.
Автономный источник питания 8 выполнен в виде гальванического элемента, гальванической батареи или аккумулятора, оснащенного средством его подзарядки от солнечного элемента (элементов) или от устройства преобразования энергии измеряемого параметра грузоподъемного крана в электрическую энергию (на чертеже условно не показано).
Это устройство, в частности, может содержать инерционный груз, связанный с пьезоэлектрическим или электромагнитным преобразователем механической энергии его перемещения при изменении пространственного положения регистратора (стрелы) или под воздействием механических колебаний или ударов, воздействующих на регистратор в процессе работы грузоподъемной машины (крана). Подзарядка автономного источника питания 8 может осуществляться также от внешнего источника питания, в том числе от источника питания внешнего устройства считывания 10.
Для обеспечения возможности считывания данных регистратора параметров цифровой вычислитель 1 содержит устройство 9 для проводной или беспроводной передачи информации из запоминающего устройства 4 во внешнее устройство считывания 10 либо запоминающее устройство 4 выполнено съемным с возможностью его подключения к внешнему устройству считывания 10, в качестве которого может использоваться мобильный носитель информации (Накопитель Flash USB Drive, Flash-карта, и т.п.) или ЭВМ.
Устройство 9, в случае проводной передачи информации из запоминающего устройства 4 во внешнее устройство считывания 10, обеспечивает реализацию одного из последовательных интерфейсов: USB, SPI, CAN, LIN, RS-232, RS-485, I2C или интерфейса карт энергонезависимой Flash-памяти, а в случае беспроводной передачи информации - одного из беспроводных интерфейсов: Bluetooth, Wi-Fi, ZigBee, GSM, CDMA или IRDA.
Цифровой вычислитель 1 может дополнительно содержать автономное или встроенное в микроконтроллер 2 устройство контроля напряжения автономного источника питания (на чертеже условно не показано). В этом случае микроконтроллер 2 формирует сигнал (признак) снижения напряжения автономного источника питания 8 до предварительно заданной величины и осуществляет запись этого признака в запоминающее устройство 4 или в собственную энергонезависимую память (в EEPROM).
Автономный регистратор параметров работает следующим образом.
Сигналы с датчиков параметров работы грузоподъемной машины 3 преобразуются в цифровой код в этих датчиках, в согласующем устройстве 7 или в микроконтроллере 2. На их основе микроконтроллер 2 производит вычисление других параметров работы грузоподъемной машины и ее механизмов (вылета, степени загрузки, показателей наработки и т.д.).
Эти параметры микроконтроллером 2 записываются в запоминающее устройство 4 с периодичностью, определяемой рабочей программой микроконтроллера 2. При этом одновременно записываются дата и время записи этих параметров, которые определяются при помощи часов реального времени 5.
При необходимости параметры, записанные в запоминающее устройство 4, либо результаты их обработки микроконтроллером 2 отображаются на индикаторе 6.
При необходимости считывания записанных данных к микроконтроллеру 2 цифрового вычислителя 1 через устройство передачи данных 9 подключается внешнее устройство считывания данных 10 регистратора параметров. Микроконтроллер 2, в соответствии с программой его работы, выявляет факт подключения внешнего устройства считывания 10 и по установленному протоколу через устройство передачи данных 9 осуществляет перезапись (копирование) данных из запоминающего устройства 4 в память внешнего устройства считывания 10. Эта перезапись может осуществляться также путем извлечения запоминающего устройства 4 из регистратора и его подключения к внешнему устройству считывания 10.
Далее внешнее устройство считывания 10 отключается от регистратора параметров и непосредственно или через дополнительное устройство чтения/записи подключается к ЭВМ для переноса в нее данных регистратора параметров для вторичной обработки. Алгоритмы вторичной обработки заранее определяются при разработке регистратора параметров и записываются в память ЭВМ. При этом, кроме контроля правильности контрольных сумм (CRC) в перезаписанных данных, дополнительно контролируется отсутствие недопустимо большого разряда автономного источника питания 8 (по соответствующему признаку) и для оператора на мониторе ЭВМ формируется сообщение о необходимости замены автономного источника питания 8. Аналогичное сообщение может быть также сформировано микроконтроллером 2 на индикаторе 6 для обслуживающего персонала грузоподъемной машины. Это позволяет своевременно заменить автономный источник питания 8 или осуществить его подзарядку.
В данном описании схематично приведены лишь частные варианты реализации предложенного технического решения. Изобретение охватывает другие возможные варианты его реализации и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Источники информации
1. SU 998309, B66C 13/16, 23.02.1983.
2. Ограничитель нагрузки крана ОНК - 140-13. Блок телеметрической памяти ограничителя нагрузки крана ОНК - 140. - Новые нормативные материалы по безопасности эксплуатации подъемных сооружений. Вып. 2, 1999. - М.: Изд-во ПИО ОБТ, с 47-99.
3. RU 47866 U1, B66C 13/18, 1009.2005.
4. RU 2307060 C2, B66C 13/18, 10.01.2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| СПОСОБ РЕГИСТРАЦИИ И РЕГИСТРАТОР ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2307060C2 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2280609C2 |
| СПОСОБ ЗАЩИТЫ И РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2010 |
|
RU2442742C1 |
| СПОСОБ РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2281240C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2282576C2 |
| СПОСОБ ПИТАНИЯ ИЗМЕРИТЕЛЬНО-УПРАВЛЯЮЩЕЙ СОСТАВНОЙ ЧАСТИ СИСТЕМЫ ЗАЩИТЫ И УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА, РАЗМЕЩЕННОЙ НА ЕГО СТРЕЛЕ ИЛИ НА ПОЛИСПАСТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2317247C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ МАШИНЫ С ГРАФИЧЕСКИМ ДИСПЛЕЕМ | 2010 |
|
RU2448036C1 |
Изобретение относится к автономному регистратору параметров грузоподъемной машины. Автономный регистратор содержит датчики параметров работы грузоподъемной машины, цифровой вычислитель, реализованный на основе микроконтроллера, и часы реального времени, входящие в состав микроконтроллера цифрового вычислителя или выполненные в виде отдельной микросхемы, подключенной к выводам питания часов реального времени. Автономный регистратор содержит запоминающее устройство, подключенное к цифровому вычислителю или входящее в его состав, при этом датчики параметров работы грузоподъемной машины подключены к микроконтроллеру цифрового вычислителя непосредственно или через дополнительное согласующее устройство. Микроконтроллер цифрового вычислителя выполнен с возможностью приема и обработки сигналов с датчиков параметров работы грузоподъемной машины и их записи в запоминающее устройство, а также с возможностью записи в запоминающее устройство сигналов с часов реального времени. Регистратор приспособлен для осуществления передачи информации из запоминающего устройства во внешнее устройство считывания и/или для отображения этой информации на индикаторе. Автономный регистратор содержит устройство контроля напряжения автономного источника питания, выполненное автономным или входящее в состав микроконтроллера цифрового вычислителя. Цифровой вычислитель выполнен с возможностью обработки сигнала устройства контроля напряжения автономного источника питания и записи соответствующего признака снижения напряжения автономного источника питания до предварительно заданной величины в запоминающее устройство или в память микроконтроллера с возможностью последующего считывания этого признака внешним устройством считывания. Цепи питания составных частей автономного регистратора, использующиеся для формирования и записи в запоминающее устройство сигналов, подключены к автономному источнику питания. Достигается обеспечение непрерывной регистрации параметров работы грузоподъемной машины независимо от наличия напряжения в бортовой сети грузоподъемной машины. 11 з.п. ф-лы, 1 ил.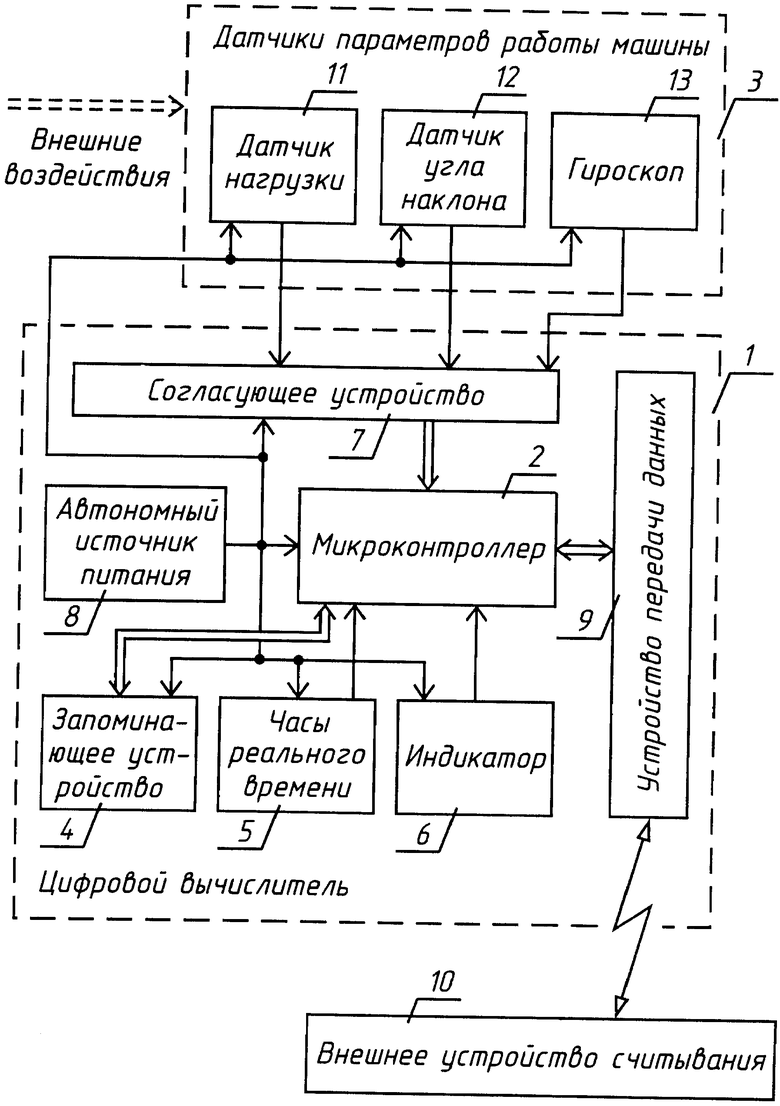
1. Автономный регистратор параметров грузоподъемной машины, содержащий датчики параметров ее работы, цифровой вычислитель, реализованный на основе микроконтроллера, часы реального времени, входящие в состав микроконтроллера цифрового вычислителя или выполненные в виде отдельной микросхемы, подключенной к микроконтроллеру, автономный источник питания, подключенный к выводам питания часов реального времени, и запоминающее устройство, подключенное к цифровому вычислителю или входящее в его состав, причем датчики параметров работы грузоподъемной машины подключены к микроконтроллеру цифрового вычислителя непосредственно или через дополнительное согласующее устройство, а микроконтроллер цифрового вычислителя выполнен с возможностью приема и обработки сигналов с датчиков параметров работы грузоподъемной машины и их записи в запоминающее устройство, а также с возможностью записи в запоминающее устройство сигналов с часов реального времени, причем регистратор приспособлен для осуществления передачи информации из запоминающего устройства во внешнее устройство считывания и/или для отображения этой информации на индикаторе, отличающийся тем, что он дополнительно содержит устройство контроля напряжения автономного источника питания, выполненное автономным или входящее в состав микроконтроллера цифрового вычислителя, который выполнен с возможностью обработки сигнала этого устройства и записи соответствующего признака снижения напряжения автономного источника питания до предварительно заданной величины в запоминающее устройство или в память микроконтроллера с возможностью последующего считывания этого признака внешним устройством считывания, а цепи питания составных частей регистратора, использующиеся для формирования и записи в запоминающее устройство указанных сигналов, подключены к автономному источнику питания.
2. Автономный регистратор по п.1, отличающийся тем, что датчики параметров работы грузоподъемной машины и цифровой вычислитель размещены в одной оболочке.
3. Автономный регистратор по п.1 или 2, отличающийся тем, что датчики параметров работы грузоподъемной машины включают в себя датчик ее нагрузки.
4. Автономный регистратор по п.3, отличающийся тем, что датчик нагрузки выполнен в виде датчика усилия в грузовом или стреловом канате или, по меньшей мере, одного датчика давления в гидроцилиндре подъема или поддержания стрелы.
5. Автономный регистратор по п.1 или 2, отличающийся тем, что датчики параметров работы грузоподъемной машины включают в себя датчик угла наклона относительно гравитационной вертикали, причем этот датчик или автономный регистратор с этим датчиком прикреплен к грузоподъемной машине с возможностью прямого или косвенного измерения угла наклона стрелы.
6. Автономный регистратор по п.1 или 2, отличающийся тем, что датчики параметров работы грузоподъемной машины включают в себя гироскоп.
7. Автономный регистратор по п.1 или 2, отличающийся тем, что автономный источник питания выполнен в виде гальванического элемента, или гальванической батареи, или аккумулятора, оснащенного средством его подзарядки от солнечного элемента, или от солнечной батареи, или от устройства преобразования энергии измеряемого параметра грузоподъемного крана в электрическую энергию, или от устройства преобразования энергии механических колебаний и/или ударов регистратора в электрическую энергию, или от внешнего источника питания.
8. Автономный регистратор по п.7, отличающийся тем, что в качестве внешнего источника питания используется источник питания внешнего устройства считывания, которое выполнено с возможностью подзарядки автономного источника питания во время считывания данных из запоминающего устройства.
9. Автономный регистратор по п.1 или 2, отличающийся тем, что запоминающее устройство выполнено съемным с возможностью его подключения к внешнему устройству считывания, или цифровой вычислитель содержит средство для проводной или беспроводной передачи информации из запоминающего устройства во внешнее устройство считывания.
10. Автономный регистратор по п.9, отличающийся тем, что средство для проводной передачи информации из запоминающего устройства во внешнее устройство считывания и внешнее устройство считывания содержат аппаратные и программные средства для реализации одного из последовательных интерфейсов: USB, SPI, CAN, LIN, RS-232, RS-485, I2C или интерфейса карт энергонезависимой Flash-памяти.
11. Автономный регистратор по п.9, отличающийся тем, что средство для беспроводной передачи информации из запоминающего устройства во внешнее устройство считывания и внешнее устройство считывания содержат аппаратные и программные средства для реализации одного из беспроводных интерфейсов: Bluetooth, WI-Fi, ZigBee, GSM, CDMA или IRDA.
12. Автономный регистратор по п.1 или 2, отличающийся тем, что он выполнен в малогабаритной оболочке с возможностью его скрытного размещения на грузоподъемной машине.
| СПОСОБ РЕГИСТРАЦИИ И РЕГИСТРАТОР ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2307060C2 |
| СПОСОБ ПИТАНИЯ ЭЛЕКТРОННОЙ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ИХ ВАРИАНТЫ) | 2005 |
|
RU2310598C2 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| Стреловой кран | 1990 |
|
SU1791356A1 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |

