Изобретение относится к подъемно-транспортной технике и может быть использовано в системах защиты грузоподъемных машин от перегрузок.
Известно, что на грузоподъемных машинах кратность (или степень) запасовки грузового или стрелового полиспаста должна соответствовать нагрузке на этот полиспаст.
В системах защиты грузоподъемных машин используется, как правило, ручная установка кратности запасовки полиспаста. После смены стрелового оборудования оператор в ручном режиме при помощи органов управления, расположенных на информационно-управляющем блоке, реализованном на основе микроконтроллера, осуществляет ввод в систему защиты действительное значение кратности запасовки полиспаста. Введенная величина сохраняется в памяти информационно-управляющего блока и далее используется при работе системы защиты [1], [2].
Недостатком этой системы является возможность ввода оператором неправильного значения кратности запасовки полиспаста и, соответственно, пониженная безопасность работы грузоподъемной машины. Если оператором введено значение кратности запасовки, превышающее фактическое, то система безопасности не предотвращает аварии грузоподъемной машины, вызванные чрезмерной нагрузкой на грузовой (или стреловой) канат.
Наиболее близким к предложенному является устройство для измерения кратности запасовки полиспаста, реализованное в системе (устройстве) безопасности грузоподъемного крана, выполненном с использованием обработки оптического изображения. Известное устройство представляет собой систему технического зрения и содержит видеокамеры (первичные оптические преобразователи), формирующие видеоизображение полиспаста, и электронное устройство, осуществляющее обработку видеоизображения и формирование выходных сигналов и выполненное в виде электронного блока на специализированных интегральных микросхемах или на микроконтроллере. Кратность запасовки полиспаста определяется при анализе стереоизображения путем подсчета количества ветвей каната [3].
Недостатками этого устройства являются ограниченные условия или диапазон его работы на грузоподъемной машине ввиду нарушения работоспособности оптической системы при наличии помех в ее рабочей зоне - веток деревьев, дождя, снегопада и т.п., а также высокая чувствительность к воздействию вибраций машины на видеокамеры, приводящих к потере четкости изображения. Еще одним недостатком является необходимость технического обслуживания - периодической очистки оптической системы от загрязнений, снега, инея, капель дождя и т.д. Это устройство имеет также повышенную сложность и соответственно пониженную надежность и высокое энергопотребление из-за высокой сложности алгоритмов обработки видеоизображений и соответственно повышенных требований к вычислительным ресурсам электронного устройства, осуществляющего эту обработку.
Техническими задачами, на решение которых направлено заявленное изобретение, являются:
- расширение диапазона внешних условий работоспособности на грузоподъемной машине, в частности обеспечение работоспособности при наличии около полиспаста веток деревьев, при дожде, снегопаде и т.п.;
- обеспечение нечувствительности к воздействию вибраций;
- упрощение или исключение технического обслуживания на грузоподъемной машине;
- повышение надежности за счет снижения аппаратурной сложности устройства и исключения влияния оптических помех на его работу;
- повышение экономичности;
- расширение функциональных возможностей устройства.
В устройстве для измерения кратности запасовки полиспаста, содержащем электронное устройство обработки и формирования сигналов и первичный измерительный преобразователь, выполненный с возможностью взаимодействия с канатами и подключенный к электронному устройству обработки и формирования сигналов, поставленные технические задачи решаются тем, что первичный измерительный преобразователь выполнен емкостным, или индуктивным, или ультразвуковым.
Этот преобразователь содержит, в частности, излучающий и приемный элементы, а электронное устройство обработки и формирования сигналов - генератор, подключенный к излучающему элементу, и усилительно-преобразовательное устройство, вход которого соединен с приемным элементом. Усилительно-преобразовательное устройство может быть выполнено на основе аналого-цифрового преобразователя, соединенного с микроконтроллером, или микроконтроллера со встроенным аналого-цифровым преобразователем. В его состав может входить интерфейсное устройство, соединенное с микроконтроллером и выполненное с возможностью проводной или беспроводной передачи выходных данных.
Решение поставленных задач может достигаться также путем выполнения первичного измерительного преобразователя с возможностью взаимодействия с подвижной обоймой полиспаста, а электронного устройства обработки и формирования сигналов - соответственно с возможностью формирования выходного сигнала о положении этой обоймы, в частности о ее предельном положении, и/или путем оснащения устройства датчиком угла наклона каната, соединенным с усилительно-преобразовательным устройством.
Датчик угла наклона каната может иметь двухкоординатное исполнение, а усилительно-преобразовательное устройство - с возможностью определения угла наклона каната γ путем преобразования выходных сигналов α и β этого датчика по формуле γ=(α2+β2)↑1/2 или по формуле γ=arctg[(tg2α+tg2β)↑1/2].
Кроме того, для решения поставленных задач устройство дополнительно может быть оснащено датчиком натяжения каната, соединенным с электронным устройством обработки и формирования сигналов. Этот датчик, в частности, содержит устройство формирования стрелы прогиба каната и тензометрическое устройство, выполненное с возможностью измерения усилия восстановления прямолинейного положения этого каната.
В любом варианте предложенного устройства, для решения поставленных задач, первичный измерительный преобразователь может быть размещен на обойме, охватывающей канат, и снабженной гибким или шарнирным подвесом, а этот преобразователь и электронное устройство обработки и формирования сигналов могут быть конструктивно объединены.
Благодаря указанным отличительным признакам в предложенном устройстве обеспечивается бесконтактное измерение кратности запасовки полиспаста без использования оптической системы, что позволяет обеспечить расширение диапазона внешних условий работоспособности на грузоподъемной машине, в частности при наличии около полиспаста веток деревьев, при дожде, снегопаде и т.п. В прототипе для подсчета кратности запасовки полиспаста необходимо видеоизображение высокого разрешения, чему препятствуют вибрации, передаваемые от двигателя работающей машины на видеокамеры. Этого требования нет в предложенном устройстве, что обеспечивает его нечувствительность к воздействию вибраций.
Очевидно также, что при использовании предложенного устройства отпадает необходимость его поддержания в чистоте, что упрощает и, в ряде случаев, исключает необходимость проведения технического обслуживания на грузоподъемной машине. Переход к более простым алгоритмам обработки сигналов позволяет также повысить надежность устройства за счет снижения его аппаратурной сложности и снизить энергопотребление.
Поэтому отличительные признаки предложенного изобретения находятся в прямой причинно-следственной связи с решением как основной, так и дополнительной технических задач.
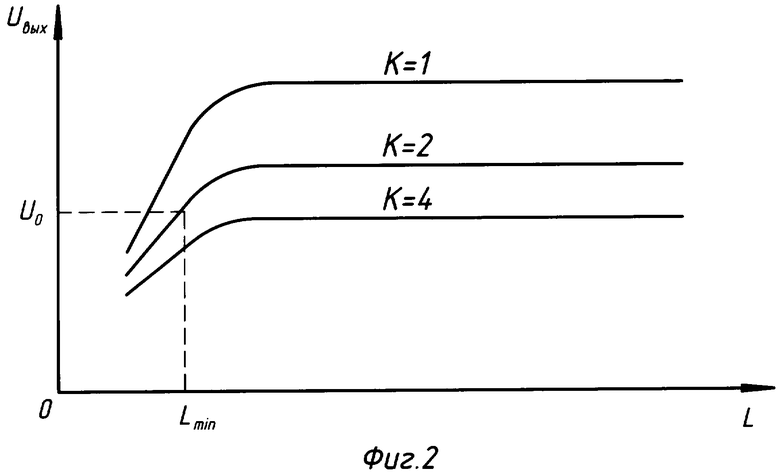
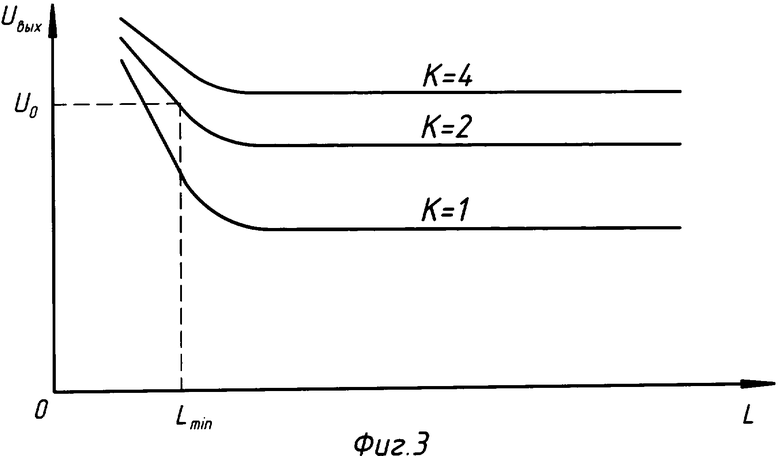
На фиг.1 в качестве примера приведена одна из возможных функциональных схем устройства для измерения кратности запасовки полиспаста. На фиг.2 - зависимость выходного сигнала емкостного измерительного преобразователя от кратности запасовки каната и от расстояния до подвижной обоймы полиспаста. На фиг.3 - аналогичные зависимости при использовании индуктивного или ультразвукового измерительного преобразователя.
Устройство для измерения кратности запасовки каната 1 полиспаста содержит электронное устройство обработки и формирования сигналов 2 и бесконтактный емкостный, индуктивный или ультразвуковой первичный измерительный преобразователь 3, содержащий, в частности, излучающий (передающий) 4 и приемный 5 элементы (фиг.1).
Электронное устройство обработки и формирования сигналов 2 содержит генератор 6, подключенный своим выходом к излучающему элементу 4, и усилительно-преобразовательное устройство, вход которого соединен с приемным элементом 5. Усилительно-преобразовательное устройство может быть выполнено на основе аналого-цифрового преобразователя 7, соединенного с микроконтроллером 8, или микроконтроллера со встроенным аналого-цифровым преобразователем.
В состав этого устройства может входить интерфейсное устройство 9, обеспечивающее проводную или беспроводную передачу результатов измерений или сигналов управления в какое-либо внешнее устройство. Интерфейсное устройство 9 обеспечивает согласование логических уровней входных и выходных сигналов микроконтроллера 8 с внешними устройствами и выполнено на базе интерфейсных микросхем. Передача может осуществляться при помощи отдельных проводов по мультиплексному каналу обмена данными (CAN, LIN, RS-485 и т.д.), и/или по радиоканалу (Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д.). В последнем случае устройство оснащено автономным источником питания и приемопередатчиком с соответствующей антенной.
При использовании емкостного принципа измерения излучающий (передающий) 4 и приемный 5 элементы выполнены в виде металлических электродов, в частности, кольцевого типа, размещенных на обойме, охватывающей один из канатов 1 полиспаста. При использовании индуктивного принципа измерения излучающий 4 и приемный 5 элементы выполнены в виде катушек, оси которых в данном примере совпадают с канатом 1 (катушки надеты на канат). Если в системе используется ультразвуковой принцип измерения, то излучающий (передающий) 4 и приемный 5 элементы аналогичным образом выполнены в виде кольцевых акустических, например пьезокерамических, преобразователей.
Первичный измерительный преобразователь расположен, преимущественно, на обойме, охватывающей канат, и снабженной гибким или шарнирным подвесом 10.
Излучающий (передающий) 4 и приемный 5 элементы могут быть также размещены не на полиспасте, а вблизи него. Например, перенесены в блок 11, размещенный на оголовке или на выдвижной секции стрелы крана (фиг.1).
В любом варианте исполнения и размещения первичного измерительного преобразователя 3 (11) его передающий элемент 4 должен создавать излучение, направленное на канаты 1 полиспаста, а приемный 5 элемент принимать излучение, измененное этими канатами по амплитуде, по фазе, по времени прихода сигнала и т.д.
Генератор 6, аналого-цифровой преобразователь 7 и, при необходимости, другие функциональные блоки устройства могут быть выполнены на основе специализированных микросхем, например типа AD7142 компании Analog Devices.
Устройство может быть дополнительно оснащено датчиком угла наклона 12 каната 1, соединенным с усилительно-преобразовательным устройством. В качестве такого датчика обычно используется кремниевый микромеханический инклинометр-акселерометр, например серии ADXL компании Analog Devices.
В состав устройства возможно также включение датчика натяжения каната, соединенного аналогичным образом с усилительно-преобразовательным устройством. Конструкции таких датчиков общеизвестны. Он, в частности, содержит устройство формирования стрелы прогиба каната, выполненное, например, в виде двух поддерживающих роликов, закрепленных на обойме (на основании) вместе с первичным измерительным преобразователем 3, и отклоняющего ролика, связанного с основанием (обоймой) через тензометрическое устройство, осуществляющее измерение усилия восстановления прямолинейного положения этого каната. Действительное значение силы натяжения каната определяется микроконтроллером 8 с учетом стрелы прогиба (параллелограмма сил).
В любом варианте реализации устройства его функциональные блоки могут быть либо разъединены, либо конструктивно объединены. В последнем случае первичный измерительный преобразователь 3, генератор 6, АЦП 7, микроконтроллер 8, интерфейсное устройство 9 и, при необходимости, датчик угла наклона 12 и датчик натяжения выполнены в виде одного блока, приспособленного для монтажа на полиспаст, в частности на канат, или на какой-либо элемент конструкции грузоподъемной машины вблизи этого полиспаста.
Устройство работает следующим образом.
В случае применения емкостного принципа измерения передающий элемент 4, выполненный в виде электрода, например кольцевого, подключенный к выходу генератора 6, создает в пространстве, окружающем полиспаст, переменное электрическое поле.
Благодаря наличию емкости С0, излучение передающего элемента (электрода) 4 принимается приемным элементом (электродом) 5 (см. фиг.1). Принятый сигнал при необходимости усиливается и преобразуется в цифровую форму при помощи АЦП 7. Его уровень фиксируется и запоминается микроконтроллером 8 или иной электронной схемой.
Если вблизи приемного элемента 5 отсутствуют другие предметы, т.е. если используется однократная запасовка полиспаста (его кратность К=1) и подвижная обойма полиспаста 13 удалена от приемного элемента (электрода) 5 на достаточно большое расстояние L, то фиксируемое микроконтроллером 8 выходное напряжение приемного элемента 5 имеет максимальную величину (фиг.2).
При наличии вблизи приемного элемента 5 другой ветви каната полиспаста, т.е. при кратности полиспаста К>1, возникает емкость С1 (фиг.1), которая совместно с емкостью С0 образует делитель напряжения. В итоге - напряжение на выходе приемного элемента 5 уменьшается. По мере увеличения количества ветвей каната, т.е. кратности полиспаста, происходит увеличение емкости С1. Это приводит к уменьшению выходного напряжения приемного элемента 5 (фиг.2). Соответственно, микроконтроллер 8, сравнивая цифровое значение этой величины с предварительно записанными в его памяти значениями, предварительно определенными расчетным или экспериментальным путем для различных значений кратности полиспаста, определяет эту кратность и передает полученное значение на внешнее устройство через интерфейсное устройство 9.
При приближении к приемному элементу 5 подвижной обоймы 13 полиспаста происходит увеличение емкости С2 (фиг.1, фиг.2). Это приводит к уменьшению напряжения на приемном элементе 5, что фиксируется микроконтроллером 8 с соответствующим формированием пропорциональных или дискретных выходных сигналов о положении подвижной обоймы 13. В частности, если расстояние L до подвижной обоймы 13 уменьшается до величины Lmin, то напряжение на приемном элементе 5 уменьшается до величины U0. В этом случае устройство формирует сигнал о предельном положении подвижной обоймы полиспаста. В системах безопасности грузоподъемных машин этот сигнал используется, преимущественно, для реализации ограничения предельного подъема грузозахватного органа.
Если в устройстве используется индуктивный первичный преобразователь, то передающий элемент 4, выполненный в виде катушки и подключенный к выходу генератора 6, создает в пространстве, окружающем полиспаст, переменное магнитное поле. Ветви каната полиспаста и подвижная обойма полиспаста взаимодействуют с этим полем и также приводят к изменению выходного напряжения на приемном элементе 5, выполненном в виде приемной катушки. Ветви каната полиспаста и подвижная обойма полиспаста, выполненные из ферромагнитных материалов, приводят к уменьшению магнитного сопротивления среды и соответственно к увеличению выходного напряжения приемного элемента 5. Далее аналогичным образом формируются выходные сигналы о кратности запасовки полиспаста и положении его подвижной обоймы.
В случае применения ультразвукового первичного преобразователя приемный элемент 5 фиксирует ультразвуковые сигналы, сформированные ультразвуковым передающим элементом 4 и отраженные отдельными ветвями каната в полиспасте и его подвижной обоймой. При этом микроконтроллер может фиксировать амплитуду принимаемых сигналов, время их прихода (при выполнении генератора 5 с модуляцией его выходного сигнала) и т.д., что не имеет принципиального значения. Далее обработка сигналов осуществляется аналогично обработке сигналов в устройстве с емкостным или индуктивным первичным преобразователем.
Устройство может содержать однокоординатный (одноосевой) или двухкоординатный (двухосевой) датчик угла наклона каната 12 (фиг.1). В последнем случае микроконтроллер 8 определяет угол наклона каната γ относительно гравитационной вертикали путем преобразования выходных сигналов α и β этого датчика 12 по приближенной формуле γ=(α2+β2)↑1/2 (при небольших значениях α и β) или по уточненной формуле γ=arctg[(tg2α+tg2β)↑1/2].
Из геометрических соображений очевидно, что при измерении углов α и β относительно гравитационной вертикали во взаимно перпендикулярных плоскостях и при вычислении значения угла наклона каната γ по приведенным формулам обеспечивается независимость результата измерения угла наклона каната γ от угла поворота датчика угла наклона каната 12 относительно оси каната 1. Соответственно, исключается необходимость защиты этого датчика и подвеса 10 от скручивания, что упрощает конструкцию устройства и дает возможность определения угла наклона одиночного каната.
Устройство может также содержать датчик натяжения каната, соединенный с усилительно-преобразовательным устройством (с АЦП 7) электронного устройства обработки и формирования сигналов 2. В этом случае устанавливается устройство формирования стрелы прогиба каната и, преимущественно, тензометрический датчик усилия, осуществляющий измерение усилия восстановления прямолинейного положения этого каната. При этом в составе интерфейсного устройства 9 может входить силовой ключ, формирующий сигналы управления, в частности защитного отключения, исполнительных механизмов грузоподъемной машины с целью ее предотвращения от перегрузки. Сигналы управления силовым ключом формирует микроконтроллер 8 после сравнения выходного сигнала датчика натяжения с максимально допустимым значением нагрузки, предварительно записанным в памяти микроконтроллера 8.
В состав устройства могут также входить дополнительные функциональные узлы, не указанные на приведенной функциональной схеме. К ним, в частности, относятся элементы термокомпенсации, дополнительные передающие и приемные элементы, позволяющие осуществить измерения с повышенной точностью по дифференциальной схеме, и т.д. Для документирования работы устройства и соответственно машины, на которую это устройство установлено, в его состав может быть включен регистратор параметров, реализованный в виде блока энергонезависимой памяти, подключенного к микроконтроллеру 8. Возможно также оснащение устройства элементами индикации, подключенными к дополнительным выходам интерфейсного устройства 9, элементами диагностики его работоспособного состояния и т.д., что не имеет принципиального значения.
В данном описании схематично приведены лишь частные варианты реализации предложенного устройства. Изобретение охватывает другие возможные варианты его исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Изобретение относится к подъемно-транспортной технике и может быть использовано в системах защиты грузоподъемных машин от перегрузок. Устройство содержит электронное устройство обработки и формирования сигналов и соединенный с ним емкостный, индуктивный или ультразвуковой первичный измерительный преобразователь, размещенный на обойме и взаимодействующий с канатами полиспаста. Измерительный преобразователь включает в себя излучающий и приемный элементы, подключенные к генератору и к усилительно-преобразовательному устройству, содержащему АЦП, микроконтроллер и проводное или беспроводное интерфейсное устройство и входящему в состав электронного устройства обработки и формирования сигналов. Устройство дополнительно может быть оснащено датчиком угла наклона каната. Обеспечивается расширение диапазона внешних условий работы устройства, его нечувствительность к воздействию вибраций, упрощение технического обслуживания, повышение надежности, а также расширение функциональных возможностей этого устройства. 6 з.п. ф-лы, 3 ил.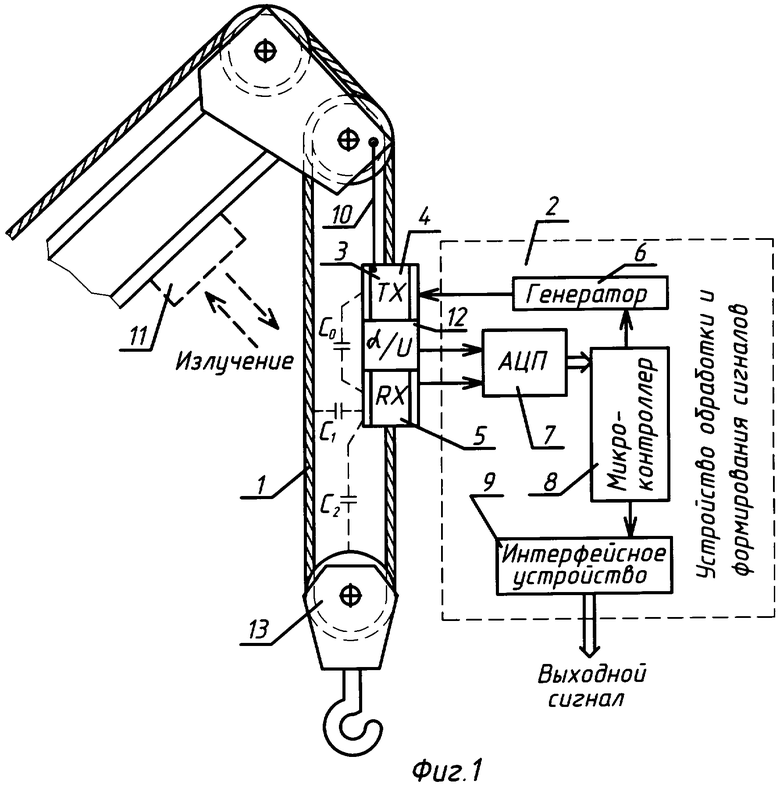
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЯВЛЕНИЯ В РАБОЧЕЙ ЗОНЕ КРАНА ЧЕЛОВЕКА | 2004 |
|
RU2266859C1 |
| Ограничитель грузоподъемности крана | 1989 |
|
SU1662918A1 |
| Ограничитель грузоподъемности кранов | 1975 |
|
SU587089A1 |
| КАБЕЛЬНЫЙ КРАН | 0 |
|
SU206042A1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
| Способ приготовления препарата анабазина для целей борьбы с вредителями сельского хозяйства | 1935 |
|
SU47865A1 |

