Изобретение относится к измерительной технике и может быть использовано для измерения параметров анизотропных стержней, таких как модули упругости I и II рода и коэффициенты Пуассона.
Известно устройство для испытания анизотропных стержней, содержащее основание, соосно установленные в нем верхний и нижний неподвижные захваты для закрепления в них стержня по его торцам, сопрягаемые между собой по коническим поверхностям обойму и секторы, кинематически связанные по цилиндрическим поверхностям с основанием и стержнем [Патент РФ №2109264, МПК G 01 N 3/08, опубл. 20.04.1998 в Бюл. №11]. Для нагружения стержня крутящим моментом оно дополнительно снабжено по меньшей мере двумя пальцами, при этом в основании выполнены по меньшей мере два винтовых паза, пальцы установлены в верхнем захвате, свободный палец каждого из которых входит в соответствующий винтовой паз, а торцы захватов имеют радиально направленные насечки для нагружения стержня скручивающим моментом. К указанным захватам прикладывается деформирующее усилие, и тем самым производится испытание.
Недостатком данного устройства является определение параметров анизотропных стержней в допущении равенства модулей растяжения-кручения и кручения-растяжения, что вносит погрешность в определение модулей упругости I и II рода, а также коэффициента Пуассона испытуемого стержня.
Известно устройство для испытания анизотропных стержней, выбранное в качестве прототипа, содержащее основание, в котором жестко закреплен верхним концом стержень, нижний конец которого жестко закреплен в каретке, имеющей возможность поступательного перемещения в опорах, и датчик линейных перемещений [Мусалимов В.М., Соханев Б.В. Механические испытания гибких кабелей. - Томск: Изд-во Томск. ун-та, 1984, с.10-12]. К каретке прикрепляются калиброванные грузы. Датчик линейных перемещений выполнен в виде последовательно соединенных тросиком верхнего конца стержня, прогибомера 6ПАО и груза, служащего для обеспечения необходимого натяжения тросика. При продольном нагружении стержень раскручивается и удлиняется, перемещая блок приборов, связанных с датчиком линейных перемещений. Для случая без вращения стержня каретка стопорится в опорах со свободным перемещением вниз.
Это устройство для испытания анизотропных стержней предназначено для определения зависимости нагрузка - угол поворота, по которым определяются модули упругости I и II рода и коэффициенты Пуассона спиральных элементов исследуемого стержня.
Недостатком этого устройства является неточность при определении параметров анизотропных стержней в допущении равенства модулей растяжения-кручения и кручения-растяжения. В некоторых приложениях точность представленного устройства, составляющая 0,01 мм, является недостаточной. Также снятие показаний осуществляется не в цифровой форме, что является недостатком, поскольку для дальнейшей обработки данных требуются большие временные затраты и возможны погрешности при расчете определяемых параметров анизотропных стержней.
Задача, на решение которой направлено предлагаемое изобретение, заключается в повышении точности измерения параметров анизотропных стержней с одновременным сокращением временных затрат на обработку результатов.
Задача решена следующим образом. Устройство для испытания анизотропных стержней, содержащее основание, в котором жестко закреплен верхним концом стержень, нижний конец которого жестко закреплен в каретке, имеющей возможность поступательного перемещения в опорах и датчик линейных перемещений, механически соединенный с кареткой, отличающееся тем, что устройство снабжено электродвигателем, с валом которого жестко соединен верхний конец стержня, датчиком угловых перемещений и вычислительной машиной, выходы которой электрически соединены с входом электродвигателя, входами датчика угловых перемещений и входом датчика линейных перемещений, а входы - с информационным выходом датчика угловых перемещений, информационным выходом датчика линейных перемещений и информационным выходом электродвигателя. Датчик угловых перемещений выполнен в виде установленных в основании и оптически сопряженных источника и приемника светового излучения, между которыми на верхнем конце стержня закреплен кодовый диск. Датчик линейных перемещений выполнен в виде пакета пьезошайб. Вычислительная машина выполнена в виде персонального компьютера. Электродвигатель выполнен шаговым.
При поступлении с выходов вычислительной машины электрического тока на вход электродвигателя вал электродвигателя начинает закручивать жестко соединенный с ним верхний конец исследуемого стержня. При этом нижний конец стержня, жестко соединенный с кареткой, изменяет свои размеры в продольном направлении, каретка при этом движется в опорах строго по вертикали. При вращении вала электродвигателя вращается также кодовый диск, жестко закрепленный на верхнем конце стержня и выдающий информацию об угле закручивания верхнего конца стержня. Информацию о продольной деформации стержня выдает пакет пьезошайб, механически соединенный с кареткой. Величина крутящего момента на верхнем конце стержня определяется по поступающему на электродвигатель напряжению. Таким образом, на входы вычислительной машины поступает измерительная информация, по которой в результате обработки определяются параметры испытуемого стержня: модули растяжения, кручения, растяжения-кручения и кручения-растяжения. В результате расчета по известным соотношениям определяются модули упругости I и II рода и коэффициенты Пуассона испытуемого анизотропного стержня.
При этом повышается точность измерения параметров анизотропных стержней, которая обеспечивается предлагаемой схемой измерения, а также введением в схему датчика угловых перемещений и использование в качестве датчика линейных перемещений пакета пьезошайб. При этом введение в схему датчика угловых перемещений в совокупности с вычислительной машиной и электродвигателем и соединение датчика линейных перемещений также с вычислительной машиной позволяет определять параметры анизотропных стержней в режиме реального времени. Установленный на стержне и размещенный между источником и приемником светового излучения кодовый диск датчика угловых перемещений и соединение информационного выхода датчика угловых перемещений с входом вычислительной машины позволяют без дополнительного блока согласования преобразовывать механические перемещения в электрический сигнал, воспринимаемый вычислительной машиной. Соответственно, становится возможным быстро и точно производить измерения параметров анизотропных стержней. При этом результаты наблюдений сразу отображаются на экране вычислительной машины, а также сохраняются в виде отдельного файла для дальнейшего анализа. Время на обработку данных существенно сокращается, поскольку нет необходимости преобразовывать данные в цифровой формат.
На чертеже представлена общая схема устройства.
Устройство для испытания анизотропных стержней содержит основание 1, на котором закреплен электродвигатель 2, с валом которого жестко соединен верхний конец стержня 3, нижний конец которого жестко закреплен в каретке 4, имеющей возможность поступательного перемещения в опорах 5. Датчик угловых перемещений выполнен в виде установленных в основании 1 и оптически сопряженных источника светового излучения 6 и приемника светового излучения 7, между которыми на верхнем конце стержня 3 закреплен кодовый диск 8. Датчик линейных перемещений выполнен в виде пакета пьезошайб 9, механически соединенного с кареткой 3. Информационный выход датчика угловых перемещений, информационный выход датчика линейных перемещений 9 и информационный выход электродвигателя 2 электрически соединены с входами В1, В2 и В3 вычислительной машины 10 соответственно. Выходы В4, В5, В6 и В7 вычислительной машины 10 соответственно электрически соединены с входами источника светового излучения 6, приемника светового излучения 7, электродвигателя 5, пакета пьезошайб 9 датчика линейных перемещений.
Устройство работает следующим образом. При подаче питания, с выхода В6 вычислительной машины 10 на вход электродвигателя 2, жестко соединенного с верхним концом стержня 3, поступает электрический ток. Также с выходов В4 и В5 вычислительной машины 10 поступает электрический ток соответственно на входы оптически сопряженных источника светового излучения 6 и приемника светового излучения 7 датчика угловых перемещений, установленных в основании 1. В результате этого источник светового излучения 6 начинает излучать световой поток, который попадает на поверхность кодового диска 8, установленного на стержне 3 между источником светового излучения 6 и приемником светового излучения 7. Далее световой поток через прозрачный участок поверхности кодового диска 8 попадает на приемник светового излучения 7. Также с выхода В7 вычислительной машины 10 поступает электрический ток на вход датчика линейных перемещений - пакет пьезошайб 9.
В результате поступления электрического тока с выхода В6 вычислительной машины 10 на вход электродвигателя 2 возникает крутящий момент, в результате чего вал электродвигателя 2 начинает поворачиваться, вместе с которым начинает поворачиваться жестко соединенный с ним верхний конец стержня 3, при этом информация о крутящем моменте на верхнем конце стержня 3 поступает с информационного выхода электродвигателя 2 на вход ВЗ вычислительной машины 10. Стержень 3 при этом начинает деформироваться, а каретка 4, в которой жестко закреплен нижний конец стержня 3, начинает двигаться в опорах 5. Пакет пьезошайб 9 датчика линейных перемещений, механически соединенный с кареткой 4, начинает деформироваться, с его информационного выхода на вход В2 вычислительной машины 10 поступает измерительная информация о продольной деформации испытуемого стержня 3.
Первоначально поворот верхнего конца стержня 3 с установленным на нем кодовым диском 8 осуществляется из исходного положения на угол, пропорциональный числу поданных на электродвигатель 2 импульсов. При этом в процессе поворота на пути следования светового луча от источника светового излучения 6 к приемнику светового излучения 7 встречаются прозрачные и непрозрачные участки кодового диска 8, в результате чего на информационном выходе датчика угловых перемещений формируется информация о текущем угловом положении верхнего конца стержня 3 и которая поступает на вход В1 вычислительной машины 10.
Информация, поступающая с информационных выходов датчика линейных перемещений 9, датчика угловых перемещений и электродвигателя 2 соответственно на входы B1, B2 и В3 вычислительной машины 10, отображается на экране вычислительной машины 10 и записывается в цифровой форме в виде отдельного файла. В ходе обработки данных испытания по заложенному алгоритму определяются модули упругости I и II рода и коэффициенты Пуассона испытуемого анизотропного стержня, которые сохраняются в виде отдельного файла и выводятся на экран вычислительной машины 10.
Таким образом, предлагаемое устройство для испытания анизотропных стержней позволяет с высокой точностью определять параметры испытуемого анизотропного стержня 3. При этом один из его концов закручивается внешним моментом, а другой при этом имеет возможность только перемещаться в продольном направлении. Закручивание верхнего конца стержня 3 осуществляется жестко соединенным с ним валом электродвигателя 2. Движение нижнего конца стержня 3 осуществляется с помощью жестко закрепленной с ним кареткой 4, имеющей возможность поступательного перемещения в опорах 5. При вращении вала электродвигателя 2 вращается также кодовый диск 8, жестко закрепленный на стержне 3 и выдающий информацию об угле закручивания стержня 3. Информацию о продольной деформации стержня 3 выдает пакет пьезошайб 9 датчика линейных перемещений, механически соединенный с кареткой 4. Величина крутящего момента на верхнем конце стержня 3 определяется по поступающему на электродвигатель 5 напряжению. Таким образом, на входы B1, B2 и В3 вычислительной машины 10 поступает измерительная информация, по которой в результате обработки определяются параметры исследуемого стержня 3: модули растяжения, кручения, растяжения-кручения и кручения-растяжения. В результате расчета по известным соотношениям определяются модули упругости I и II рода и коэффициенты Пуассона испытуемого анизотропного стержня.
В качестве конкретного примера выполнения предлагается устройство для испытания анизотропных стержней, в котором электродвигатель 2 выполняется шаговым. Опоры 5 выполняются в виде направляющих поступательного движения, например, типа «ласточкин хвост».
Датчик угловых перемещений выполняется в виде кодового диска с прорезями, устанавливаемого на исследуемый стержень устройства между оптически сопряженными инфракрасным светодиодом и фотодиодом [Патент РФ №2244290, МПК G 01 N 19/02, опубл. 10.01.2005 в Бюл. №1].
Датчик линейных перемещений выполняется в виде пакета пьезошайб. Вычислительная машина выполняется в виде персонального компьютера.
Жесткое соединение верхнего конца стержня и вала электродвигателя осуществляется, например, с помощью муфты.
На основании вышеизложенного заявляемая совокупность позволяет на порядок повысить точность измерения параметров анизотропных стержней с одновременным сокращением временных затрат на обработку результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТНЫХ ХАРАКТЕРИСТИК АНИЗОТРОПНЫХ СТЕРЖНЕЙ | 2010 |
|
RU2435153C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ | 2005 |
|
RU2309419C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2299400C2 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОФИЛЯ ПЕРА ЛОПАТКИ | 2005 |
|
RU2311614C2 |
| Машина для исследования сложного напряженного состояния трубчатых образцов материалов | 1958 |
|
SU121586A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ВОЛОКОННЫХ СВЕТОВОДОВ НА МЕХАНИЧЕСКУЮ УСТАЛОСТЬ | 2001 |
|
RU2200309C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ГОРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2034145C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ОБРАЗЦОВ ВОЛОКОННЫХ СВЕТОВОДОВ НА МЕХАНИЧЕСКУЮ УСТАЛОСТЬ | 2006 |
|
RU2319130C9 |
| Способ и устройство измерения крутящего момента приёмного вала горячештамповочного пресса для измерения его усилия | 2023 |
|
RU2820805C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения параметров анизотропных стержней, таких как модули упругости I и II рода и коэффициенты Пуассона. Задача, на решение которой направлено предлагаемое изобретение, заключается в повышении точности измерения параметров анизотропных стержней с одновременным сокращением временных затрат на обработку результатов. Устройство для испытания анизотропных стержней содержит основание, в котором жестко закреплен верхним концом стержень, нижний конец которого жестко закреплен в каретке, имеющей возможность поступательного перемещения в опорах, и датчик линейных перемещений, механически соединенный с кареткой. При этом устройство снабжено электродвигателем, с валом которого жестко соединен верхний конец стержня, датчиком угловых перемещений и вычислительной машиной, выходы которой электрически соединены с входом электродвигателя, входами датчика угловых перемещений и входом датчика линейных перемещений, а входы - с информационным выходом датчика угловых перемещений, информационным выходом датчика линейных перемещений и информационным выходом электродвигателя. 4 з.п. ф-лы, 1 ил.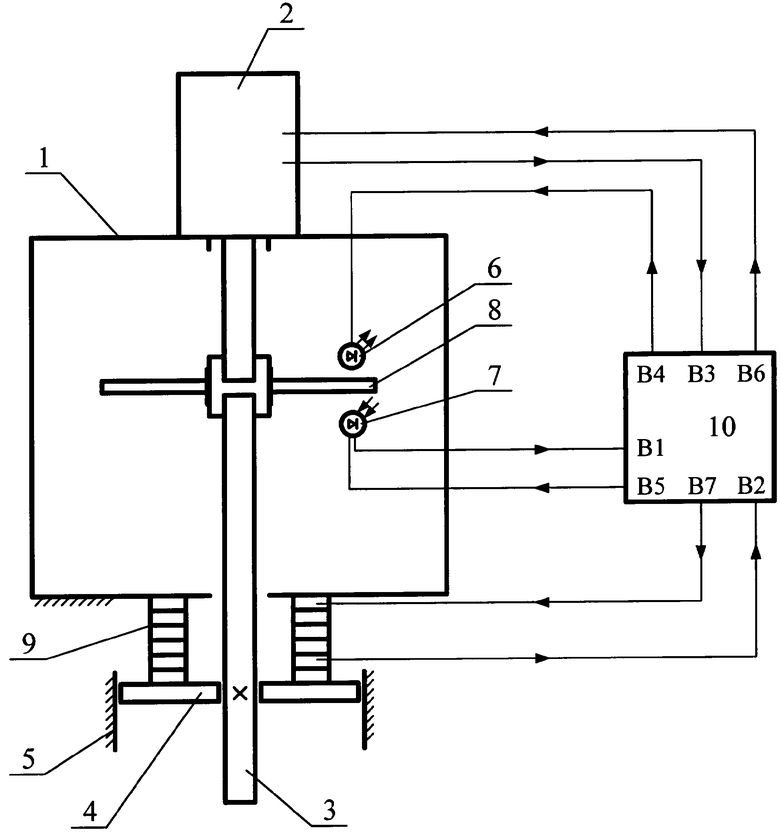
| Устройство для испытания стержней | 1981 |
|
SU1062559A1 |
| Установка для испытания образцов на прочность | 1983 |
|
SU1099229A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ НА СЖАТИЕ ДЛИННОМЕРНЫХ ОБРАЗЦОВ | 1996 |
|
RU2109264C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ПРОЧНОСТЬ | 1996 |
|
RU2112230C1 |
| DE 10242757, 18.03.2004. | |||

