Изобретение относится к области судовождения, в частности к системам автоматического управления продольным движением судна.
Известно устройство для проводки судна по узким участкам фарватера, которое содержит измерители вектора продольной скорости судна и скорости поворота корпуса судна в горизонтальной плоскости, измеритель координат и курса судна, внешнюю энергозависимую память, выходами соединенные с микроконтроллером. Устройство предоставляет судоводителю на экране в графической форме информацию о текущем и прогнозируемом положении судна относительно узкого участка фарватера и заданной прямолинейной траектории прохождения этого участка. Задача судоводителя при проводке судна по узкому участку фарватера состоит в том, чтобы с помощью органов управления рулем и тягой движителей судна удерживать условное изображение судна в границах фарватера, показанных на графическом экране (RU 2318187 С1, МПК G01C 21/14, опубликован 27.02.2008).
Недостатком этого устройства является необходимость ручного высокоточного управления как минимум двойным интегратором. А именно, при постоянной продольной скорости движения судна боковое отклонение является интегралом от путевого угла. В первом приближении путевой угол является интегралом от угловой скорости поворота корпуса судна в горизонтальной плоскости (если пренебречь углом дрейфа и временем реакции привода руля). Известно, что ручное управление двойным интегратором требует от оператора высокого мастерства, достигаемого с помощью длительных тренировок.
Наиболее близким к изобретению является устройство для проводки судна по узким участкам фарватеров, которое содержит датчик угла перекладки руля, датчик угловой скорости поворота судна, задатчик путевого угла, рулевое устройство судна, механически связанное с датчиком угла перекладки руля, автоматический регулятор путевого угла, первый вход которого соединен с выходом датчика угловой скорости поворота судна, второй вход автоматического регулятора путевого угла соединен с выходом датчика угла перекладки руля, а выход - с приводом рулевого устройства судна. Автоматический регулятор путевого угла содержит вычислитель бокового отклонения судна от заданной прямолинейной траектории, первый вход которого является третьим входом автоматического регулятора путевого угла, который соединен с первым входом приемника спутниковых навигационных систем с антенной, а второй вход вместе с первым входом блока оценки состояния судна и пятым входом сумматора является четвертым входом автоматического регулятора путевого угла, который соединен с выходом задатчика путевого угла (патент RU 2224279 С1, МПК 7 G01D 1/00, опубликован 20.02.2004).
Недостатком известного устройства для проводки судна по узким участкам фарватера является невысокая точность выведения судна на минимальной дистанции на заданную прямолинейную траекторию прохождения узкости и удержания его на этой траектории, большие перегрузки рулевого привода, что приводит его к повышенному износу.
Технический результат заключается в повышении точности выведения судна на минимальной дистанции на заданную траекторию прохождения узкости и удержание его на этой траектории с минимальной погрешностью, а также в снижении износа рулевого привода.
Указанный технический результат достигается тем, что в устройство для проводки судна по узким участкам фарватера, содержащее рулевой привод, механически связанный с рулем судна, выход руля соединен с датчиком угла перекладки руля, датчик угловой скорости поворота судна, задатчик путевого угла судна, автоматический регулятор перекладки руля с четырьмя входами, снабженный блоком вычисления бокового отклонения судна от заданной прямолинейной траектории, первый вход которого является третьим входом регулятора путевого угла, при этом первый вход регулятора путевого угла соединен с выходом датчика угловой скорости поворота судна, второй вход регулятора путевого угла соединен с выходом датчика угла перекладки руля, четвертый вход регулятора путевого угла соединен с выходом задатчика путевого угла, а выход регулятора путевого угла соединен с рулевым приводом, введен датчик координат центра масс судна, выходом подключенный к третьему входу регулятора путевого угла, выполненного в виде ПИД регулятора, в который введены блок постоянной памяти, хранящий координаты заданной прямолинейной траектории, выход которого соединен со вторым входом блока вычисления бокового отклонения судна от заданной прямолинейной траектории, блоки вычисления производной и интеграла бокового отклонения судна от заданной прямолинейной траектории, входы которых соединены с выходом блока вычисления бокового отклонения судна от заданной прямолинейной траектории, четыре блока сравнения, умножитель, блок вычисления расчетного угла перекладки руля, первый и второй входы которого образуют первый и четвертый входы регулятора путевого угла, фильтр низких частот, блок вычисления заданного угла перекладки руля, блок вычисления сигнала управления, первый вход которого является вторым входом регулятора путевого угла, а выход - выходом регулятора путевого угла, причем первый вход первого блока сравнения соединен с выходом блока вычисления производной бокового отклонения судна от заданной прямолинейной траектории, выходы первого блока сравнения и блока вычисления интеграла бокового отклонения судна от заданной прямолинейной траектории подключены к входам умножителя, выход которого соединен с третьим входом блока вычисления расчетного угла перекладки руля, четвертый и пятый входы которого соединены с выходами блока вычисления бокового отклонения судна от заданной прямолинейной траектории и блока постоянной памяти соответственно, выход блока вычисления расчетного угла перекладки руля соединен с первым входом второго блока сравнения и с третьим входом блока вычисления заданного угла перекладки руля, первый и четвертый входы которого соединены с выходами третьего и второго блоков сравнения, а второй вход - с выходом фильтра низких частот, подключенным к первому входу третьего блока сравнения, выход которого соединен с первым входом блока вычисления заданного угла перекладки руля, выход которого подключен к первому входу четвертого блока сравнения, выходом соединенного с входом блока вычисления сигнала управления, вторые входы указанных блоков сравнения соединены с выходом блока постоянной памяти.
На фиг.1 представлена структурная схема устройства для проводки судна по узким участкам фарватера.
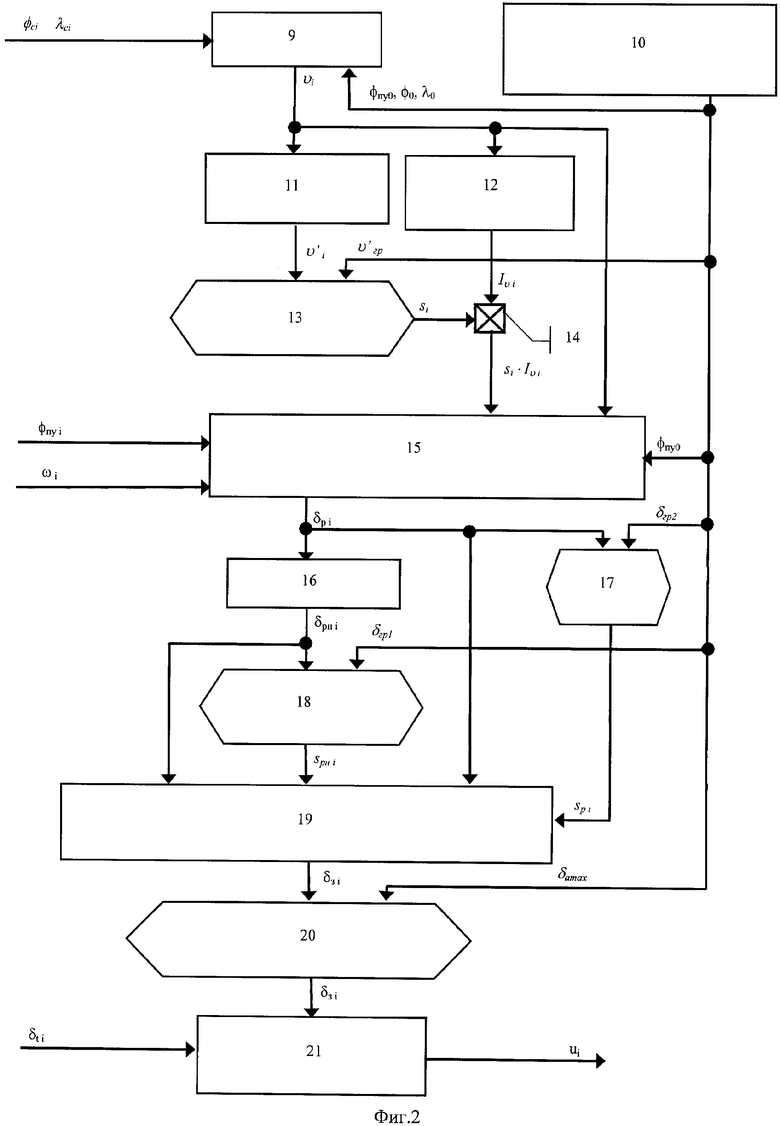
На фиг.2 - функциональная схема автоматического регулятора путевого угла.
Устройство для проводки судна по узким участкам фарватера содержит автоматический регулятор 1 путевого угла (фиг.1), датчик 2 координат центра масс судна, датчик 3 путевого угла, датчик 4 угловой скорости поворота судна в горизонтальной плоскости, датчик 5 угла перекладки руля. Датчик путевого угла 2, датчик координат центра масс судна 3 и датчик угловой скорости 4 механически связаны с корпусом 7 судна. Датчик 5 угла перекладки руля механически связан с рулем 8 судна. Выходы датчика 4 угловой скорости поворота судна в горизонтальной плоскости, датчика 5 угла перекладки руля, датчика 3 путевого угла, датчика 2 координат центра масс судна соединены соответственно с первым, вторым, третьим и четвертым входами автоматического регулятора 1 путевого угла, выход которого соединен с входом рулевого привода 6.
Автоматический регулятор 1 путевого угла содержит блок 9 вычисления бокового отклонения судна от заданной прямолинейной траектории, первый вход которого является третьим входом автоматического регулятора 1 путевого угла, блок 10 постоянной памяти, в котором хранятся параметры заданной прямолинейной траектории и выход которого соединен со вторым входом блока 9 вычисления бокового отклонения судна от заданной прямолинейной траектории, блок 11 вычисления производной бокового отклонения судна от заданной прямолинейной траектории, вход которого соединен с выходом блока 9 вычисления бокового отклонения судна от заданной прямолинейной траектории; блок 12 вычисления интеграла бокового отклонения судна от заданной прямолинейной траектории, вход которого соединен с выходом блока 9 вычисления бокового отклонения судна от заданной прямолинейной траектории 9; первый блок 13 сравнения, первый вход которого соединен с выходом блока 11 вычисления производной бокового отклонения, второй вход блока 13 сравнения соединен с выходом блока 10 постоянной памяти; умножитель 14, первый вход которого соединен с выходом блока 13 сравнения, второй вход умножителя 14 соединен с выходом блока 12 вычисления интеграла бокового отклонения 12; блок 15 вычисления расчетного угла перекладки руля по линейному закону управления, первый и второй входы которого образуют четвертый и первый входы регулятора 1 путевого угла, соответственно, третий вход соединен с выходом умножителя 14, четвертый вход - с выходом блока 9 вычисления бокового отклонения, а пятый вход соединен с выходом блока 10 постоянной памяти; фильтр 16 низких частот, вход которого соединен с выходом блока 15 вычисления расчетного угла перекладки руля по линейному закону управления; второй блока сравнения 17, первый вход которого соединен с выходом блока 15 вычисления расчетного угла перекладки руля по линейному закону управления, а второй вход соединен со вторым выходом блока 10 постоянной памяти; третий блока 18 сравнения, первый вход которого соединен с выходом фильтра 16 низких частот, а второй вход соединен с выходом блока 10 постоянной памяти; блок 19 вычисления заданного угла перекладки руля, первый вход которого соединен с выходом блока 18 сравнения, а второй вход соединен с выходом фильтра 16 низких частот, третий вход соединен с выходом блока 15 вычисления расчетного угла перекладки руля по линейному закону управления, а четвертый вход соединен с выходом блока 17 сравнения; четвертый блок 20 сравнения, первый вход которого соединен с выходом блока 19 вычисления заданного угла перекладки руля, а второй вход соединен с выходом блока 10 постоянной памяти; вычислитель 21 сигнала управления, первый вход которого образует второй вход регулятора 1 путевого угла, а второй вход соединен с выходом блока 20 сравнения, а выход является выходом регулятора 1 путевого угла.
Устройство для проводки судна по узким участкам фарватера работает следующим образом. Для обеспечения работы устройства в блок 10 постоянной памяти записываются следующие параметры: координаты начала (широта ϕо и долгота λ0) и направление ϕny0 заданного прямолинейного участка прохождения узкости и параметры, определяющие работу алгоритма управления: коэффициенты обратной связи (Kny, Kω, Kυ, KIυ) по путевому углу, по скорости поворота корпуса судна в горизонтальной плоскости, по боковому отклонению, по интегралу бокового отклонения соответственно; граничное значение производной бокового отклонения  , порог зоны нечувствительности изменений расчетного угла перекладки руля
, порог зоны нечувствительности изменений расчетного угла перекладки руля
δгр1, порог сильного отклонения расчетного угла перекладки руля δгр2, причем δгр1 должно быть меньше δгр2. После этого в цикле выполняются следующие действия (счетчик цикла i указан в качестве нижнего индекса в обозначениях переменных). В блок вычисления 9 бокового отклонения из датчика 1 поступают текущие координаты центра масс судна (ϕci, λci) и из блока 10 поступают параметры заданного прямолинейного участка прохождения узкости (ϕny0, ϕ0, λ0). Блок 9 вычисляет текущее боковое отклонение центра масс судна υi от заданной прямолинейной траектории, проходящей через заданный прямолинейный участок прохождения узкости. Из блока 9 текущее боковое отклонение υi поступает в блок вычисления 11 производной бокового отклонения и в нем производится вычисление производной текущего бокового отклонения  , например по формуле:
, например по формуле:

 ,
,
где i - номер текущего шага управления;
 - оценка производной бокового отклонения;
- оценка производной бокового отклонения;
υi-3, υi-2, υi-1 - боковые отклонения, измеренные на предыдущих шагах цикла управления, указанных индексами;
υi - боковое отклонение, измеренное на текущем шаге цикла управления.
Из блока 9 текущее боковое отклонение υi поступает в блок 12 вычисления интеграла бокового отклонения, где производится вычисление интеграла бокового отклонения Iυi, например, по формуле прямоугольников:

Iυi:=0 при i=0,
где i - номер текущего шага управления;
Iυi - текущее значение интеграла бокового отклонения;
Iυi-1 - значение интеграла бокового отклонения на предыдущем шаге цикла управления;
υi - боковое отклонение, измеренное на текущем шаге цикла управления;
Δt - длительность данного шага цикла управления.
Из блока 11 производная текущего бокового отклонения поступает в блок сравнения 13, где производится вычисление значения числового признака si. Если  ,
,
то si присваивается 1, иначе присваивается 0. Признак si обеспечивает обнуление интеграла бокового отклонения Iυi в том случае, когда возникает необходимость перехода на новую траекторию движения, и боковое отклонение резко изменяет свою величину. В этом случае интеграл бокового отклонения Iυi становится помехой, и он должен быть исключен с помощью обнуления из работы регулятора 1 до окончания процесса перехода на новую траекторию движения. Признаком окончания процесса перехода судна на новую траекторию является выполнение условия  Из блока 13 значение признака
Из блока 13 значение признака
si поступает в умножитель 14, где умножается на значение интеграла бокового отклонения Iυi, поступающее из блока 12. Из умножителя 14 в блок 15 вычисления расчетного угла перекладки руля по линейному закону управления поступает ноль или текущее значение интеграла бокового отклонения Iυi. Из блока 10 памяти в блок 15 поступает направление заданной прямолинейной траектории ϕny0. Из блока 9 вычисления бокового отклонения в блок 15 поступает текущее боковое отклонение υi. Из датчика 4 угловой скорости поворота корпуса судна в блок 15 поступает текущая угловая скорость ωi. Из датчика 3 путевого угла в блок 15 поступает текущий путевой угол судна ϕnyi. В блоке 15 по соответствующей формуле вычисляется расчетное значение угла перекладки руля δpi.

где i - номер текущего шага управления;
δpi - расчетное значение угла перекладки руля;
Kny, Kω, Kυ, KIu - постоянные коэффициенты закона управления, которые определяются гидродинамическими характеристиками судна и требуемым качеством управления;
ϕny0 - направление заданной прямолинейной траектории;
ϕnyi - текущий путевой угол судна;
ωi - текущая угловая скорость;
Iυi - текущее значение интеграла бокового отклонения.
Из блока 15 расчетное значение угла перекладки руля δpi, поступает в фильтр 16 низких частот, при этом вычисление расчетного значения угла перекладки руля осуществляется без высокочастотной шумовой составляющей δрнi, например, с помощью фильтра скользящего треугольного среднего по формуле:

δpнi:=δpi при i<4,
где i - номер текущего шага управления;
δрнi - расчетное значение угла перекладки руля без высокочастотной шумовой составляющей;
δpi-4, δpi-3, δpi-2, δpi-1 - расчетные значения угла перекладки руля, вычисленные на предыдущих шагах цикла управления, указанных индексами;
δpi - расчетное значение угла перекладки руля, вычисленное на текущем шаге цикла управления.
Из блока 9 расчетное значение угла перекладки руля δpi поступает в блок 17 сравнения, где производится вычисление значения числового признака spi. Если выполняется неравенство (5), то признаку spi присваивается 1, иначе присваивается 0.

где i - номер текущего шага управления;
δpi - расчетное значение угла перекладки руля на текущем шаге цикла управления;
δзi-1 - заданное значение угла перекладки руля на предыдущем шаге цикла управления;
δгр2 - второе граничное значение угла перекладки руля.
Числовой признак spi, обеспечивает использование расчетного угла перекладки руля δpi в качестве заданного δзi, при условии, что отклонение δpi от δзi-1 превысило порог сильного отклонения δгр2 (выполнено неравенство (5)).
Из фильтра 16 низких частот расчетное значение угла перекладки руля без высокочастотной шумовой составляющей δрнi поступает в блок 18 сравнения, где производится вычисление значения числового признака spнi. Если выполняется неравенство (6), то spнi присваивается 1, иначе присваивается 0.

где i - номер текущего шага управления;
δрнi - расчетное значение угла перекладки руля без высокочастотной шумовой составляющей на текущем шаге цикла управления;
δзi-1 - заданное значение угла перекладки руля на предыдущем шаге цикла управления;
δгр1 - первое граничное значение угла перекладки руля.
Числовой признак spнi обеспечивает использование расчетного угла перекладки руля без высокочастотной шумовой составляющей δрнi в качестве заданного δзi при условии, что отклонение δрнi от δзi-1 превысило порог зоны нечувствительности δгр1, но меньше порога сильного отклонения δpi от δзi-1 (выполнено неравенство (6) и не выполнено неравенство (5)).
Из блока 18 сравнения в блок 19 вычисления заданного угла перекладки руля поступает значение признака sрнi. Из фильтра 16 низких частот в блок 19 поступает расчетное значение угла перекладки руля без высокочастотной шумовой составляющей δрнi. Из блока 15 в блок 19 поступает расчетное значение угла перекладки руля δpi. Из блока 17 в блок 19 поступает значение признака spi. В блоке 19 по формуле (7) производится вычисление заданного угла перекладки руля δзi

где i - номер текущего шага управления;
δзi - заданный угол перекладки руля;
spi - числовой признак, обеспечивающий использование расчетного угла перекладки руля δpi в качестве заданного δзi, при условии, что произошло резкое увеличение абсолютной величины расчетного угла перекладки руля (выполнено неравенство (5));
δpI - расчетный угол перекладки руля;
spнi - числовой признак, обеспечивающий использование расчетного угла перекладки руля без высокочастотной шумовой составляющей δpнi, в качестве заданного δзi при условии, что выполнено неравенство (6) и не выполнено неравенство (5);
δрнI - расчетный угол перекладки руля без высокочастотной шумовой составляющей;
δзi-1 - заданный угол перекладки руля, полученный на предыдущем шаге цикла управления; используется в качестве заданного δзi, при условии, что не выполнены неравенства (5) и (6).
Из блока 19 в блок 20 сравнения поступает значение заданного угла перекладки руля δзi. Если |δзi|>δamax, то δзi присваивается δamax·(δзi/|δзi|), иначе δзi, не изменяется. Из блока 20 в блок 21 вычисления сигнала управления поступает значение заданного угла перекладки руля δзi Из датчика 5 угла перекладки руля в блок 21 поступает текущее измеренное значение угла перекладки руля δti. В блоке 21 выполняется вычисление значения сигнала управления ui по формуле (8).

где i - номер текущего шага управления;
ui - текущий сигнал управления;
δзi - заданный угол перекладки руля;
δti - текущее измеренное значение угла перекладки руля.
Из блока 21 в рулевой привод 6 поступает сигнал управления ui для отработки необходимой перекладки руля.
Текущие значения всех используемых величин хранятся в оперативной памяти УПС.
Известно, что наличие в законе управления члена, пропорционального интегралу бокового отклонения, обеспечивает астатизм регулятора при действии постоянного возмущающего момента и постоянной боковой силы при движении по прямолинейной траектории. Однако присутствие члена, пропорционального интегралу бокового отклонения, приводит к увеличению перерегулирования и времени переходного процесса при выводе судна на прямолинейную траекторию. Использование блоков 11, 13 и умножителя 14 в регуляторе 1 обеспечивает отключение (обнуление) в законе управления члена, пропорционального интегралу бокового отклонения, что обеспечивает сокращение дистанции вывода судна на заданную прямолинейную траекторию прохождения узкости.
Обычно в выходном сигнале закона управления присутствуют высокочастотные шумы, которые приводят к перегрузке привода руля и практически не влияют на траекторию движения судна. Непосредственное применение фильтра низких частот к выходному сигналу закона управления позволяет избавиться от высокочастотных шумов, но ведет к дополнительной задержке сигнала управления и способствует уменьшению запаса устойчивости всего контура управления. Использование фильтра 16, блоков 17, 18 и 19 в регуляторе 1 обеспечивает существование зоны нечувствительности при малых изменениях выходного сигнала закона управления. Когда |δрнi-δзi|≤δгр1, заданное значение угла перекладки руля не изменяется. Если выходной сигнал закона управления изменяется на значительную величину (|δpi-δзi|>δгр2), то это значение сразу становится заданной величиной угла перекладки руля, что обеспечивает минимальное время задержки сигнала управления. В остальных случаях заданной величиной угла перекладки руля становится отфильтрованное (без высокочастотной составляющей) значение расчетного угла перекладки руля.
Указанное выполнение регулятора позволяет исключить высокочастотные шумы в выходном сигнале управления и, следовательно, снизить нагрузку на привод руля. Кроме того, наличие в устройстве блоков сравнения, блока вычисления расчетного угла перекладки руля по линейному закону управления, фильтра низких частот обеспечивают зону нечувствительности при малых изменениях расчетного угла перекладки руля, в результате чего заданное значение угла перекладки руля не изменяется и дополнительно снижается нагрузка на привод руля без ухудшения точности управления движением. При значительном изменении расчетного угла перекладки руля это значение становится заданной величиной угла перекладки руля, что обеспечивает минимальное время задержки сигнала управления и уменьшение дистанции вывода судна на заданную прямолинейную траекторию. В остальных случаях заданной величиной перекладки руля становится отфильтрованное значение расчетного угла перекладки руля. Данное обстоятельство позволяет повысить быстродействие системы управления и снизить износ привода руля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА НОВЫЙ КУРС | 2012 |
|
RU2491509C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |

Изобретение относится к области приборостроения и может найти применение в системах автоматического управления продольным движением судна. Технический результат - повышение точности управления. Для достижения данного результата в устройство дополнительно введен датчик координат центра масс судна, автоматический регулятор путевого угла выполнен в виде ПИД регулятора, который снабжен блоками вычисления производной и интеграла бокового отклонения судна от заданной прямолинейной траектории, четырьмя блоками сравнения, умножителем, фильтром низких частот, блоками вычисления расчетного угла перекладки руля по линейному закону управления, вычисления заданного угла перекладки руля, вычисления сигнала управления. Наличие в устройстве блоков сравнения, блока вычисления расчетного угла перекладки руля по линейному закону управления, фильтра низких частот обеспечивает заданное значение угла перекладки руля и снижает нагрузку на привод руля без ухудшения точности управления. 2 ил.
Устройство для проводки судна по узким участкам фарватера, содержащее рулевой привод, механически связанный с рулем судна, выход руля соединен с датчиком угла перекладки руля, датчик угловой скорости поворота корпуса судна, задатчик путевого угла судна, автоматический регулятор перекладки руля с четырьмя входами, снабженный блоком вычисления бокового отклонения судна от заданной прямолинейной траектории, первый вход которого является третьим входом регулятора путевого угла, при этом первый вход регулятора путевого угла соединен с выходом датчика угловой скорости поворота корпуса судна, второй вход регулятора путевого угла соединен с выходом датчика угла перекладки руля, четвертый вход регулятора путевого угла соединен с выходом задатчика путевого угла, а выход регулятора путевого угла соединен с рулевым приводом, отличающееся тем, что введен датчик координат центра масс судна, выходом подключенный к третьему входу регулятора путевого угла, выполненного в виде ПИД регулятора, в который введены блок постоянной памяти, хранящий координаты заданной прямолинейной траектории, выход которого соединен со вторым входом блока вычисления бокового отклонения судна от заданной прямолинейной траектории, блоки вычисления производной и интеграла бокового отклонения судна от заданной прямолинейной траектории, входы которых соединены с выходом блока вычисления бокового отклонения судна от заданной прямолинейной траектории, четыре блока сравнения, умножитель, блок вычисления расчетного угла перекладки руля по линейному закону, первый и второй входы которого образуют первый и четвертый входы регулятора путевого угла, фильтр низких частот, блок вычисления заданного угла перекладки руля, блок вычисления сигнала управления, первый вход которого является вторым входом регулятора путевого угла, а выход - выходом регулятора путевого угла, причем первый вход первого блока сравнения соединен с выходом блока вычисления производной бокового отклонения судна от заданной прямолинейной траектории, выходы первого блока сравнения и блока вычисления интеграла бокового отклонения судна от заданной прямолинейной траектории подключены к входам умножителя, выход которого соединен с третьим входом блока вычисления расчетного угла перекладки руля по линейному закону, четвертый и пятый входы которого соединены с выходами блока вычисления бокового отклонения судна от заданной прямолинейной траектории и блока постоянной памяти соответственно, выход блока вычисления расчетного угла перекладки руля соединен с первым входом второго блока сравнения и с третьим входом блока вычисления заданного угла перекладки руля, первый и четвертый входы которого соединены с выходами третьего и второго блоков сравнения, а второй вход - с выходом фильтра низких частот, подключенным к первому входу третьего блока сравнения, выход которого соединен с первым входом блока вычисления заданного угла перекладки руля, выход которого подключен к первому входу четвертого блока сравнения, выходом соединенного с входом блока вычисления сигнала управления, вторые входы указанных блоков сравнения соединены с выходом блока постоянной памяти.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ И ИНДИКАЦИИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2006 |
|
RU2318187C1 |
| US 5916284 А, 29.06.1999 | |||
| JP 3279867 А, 11.12.1991 | |||
| JP 55146006 А, 14.11.1980. | |||

