Изобретение относится к области управления движением морских судов и предназначено для предотвращения опасного сближения судов в ограниченных водах, например, проливах, бухтах, заливах и морских портах, направление движения на акваториях которых строго регламентировано предписанными фарватерами.
Одной из особенностей современного морского транспорта является коллективный характер движения, который нередко, особенно в зонах транспортных путей, примыкающих к портам, принимает форму разнонаправленных потоков с предельными значениями интенсивности и динамичности движения морских судов. Это требует в интересах обеспечения безопасности движения специального управления движением судов - принятия специальных управленческих решений для предотвращения опасного сближения судов. Сближающиеся суда управляются путем изменения их курсов и скоростей таким образом, чтобы расстояние между судами не уменьшалось до недопустимо малых величин. При этом вводится понятие зоны безопасности судна, под которым понимается круг с центром в точке местоположения судна и радиусом, равным минимально допустимому расстоянию между судами. При безопасном движении не допускается вторжение в зону безопасности судна других судов.
При движении судов на акваториях, где геометрия фарватеров делает невозможным изменение линии движения судов (то есть, находясь на фарватере, судно может двигаться только вдоль линии фарватера вперед или назад), требуются специальные подходы к решению проблемы предотвращения опасного сближения судов, на что и направлен предлагаемый способ. Под линией движения в данном случае понимается прямая, вдоль которой происходит движение судна. Движение судна без изменения линии движения означает его движение только вперед или назад относительно первоначального курса движения судна.
Существующие системы управления движением судов могут предотвращать опасное сближение судов. Как правило, это происходит путем реализации способа, в котором на основе текущих координат, скорости и курса каждого судна, для каждой пары судов, находящихся на акватории, выполняется процедура распознавания судов как опасно сближающихся. Если суда распознаны как опасно сближающиеся, вычисляется вектор ускорения одного из судов. По величине и направлению этого вектора судну задается режим движения, предотвращающий опасное сближение этих судов. При этом при вычислении вектора ускорения предполагается, что суда движутся на открытой воде, то есть имеется возможность свободного изменения сближающимися судами и скорости, и курса. Однако, если сближающиеся суда движутся в ограниченных водах (на фарватерах проливов, бухт, заливов и морских портов), то есть имеются ограничения на изменение ими линии движения, то вычисленный на основе такого способа вектор ускорения одного из судов, необходимый для предотвращения опасного сближения двух судов, может оказаться непригодным для управления судном из-за недопустимого изменения его курса и, соответственно, линии движения. Поэтому при движении судов по фарватерам вычислять вектор ускорения одного из судов, необходимый для предотвращения опасного сближения двух судов, следует на основе способа, в котором с целью предотвращения недопустимого изменения линии движения судна вычисленный вектор ускорения судна был бы строго параллелен вектору скорости судна.
Известен способ «Оптимальное управление расхождением судов», описанный в статье [1], реализующий предотвращение опасного сближения двух судов путем измерения координат, скоростей и курсов движения каждого судна, вычисления минимального прогнозируемого расстояния между судами и, если это расстояние меньше минимально допустимого, вычисляющий оптимальную траекторию расхождения двух судов на основе решения оптимизационной задачи и задающий соответствующий этой траектории режим движения судов.
Основным недостатком способа «Оптимальное управление расхождением судов» является то, что оптимальная траектория расхождения судов вычисляется в предположении о движении судов на свободной воде, то есть о возможности свободного изменения сближающимися судами и скорости и курса, и, следовательно, управление движением судов для предотвращения их опасного сближения становится недопустимым для ограниченных вод, где геометрия фарватеров делает невозможным изменение линии движения судов.
Известен также способ «Алгоритм управления судном для предотвращения столкновений судов», описанный в статье [2], реализующий предотвращение опасного сближения двух судов путем измерения координат, скоростей и курсов движения каждого судна, выбора первого судна и вычисления относительных координат, относительных скоростей и относительных курсов первого судна, определения крайних значений относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна и сравнения их с текущим относительным курсом первого судна, затем формулирования вывода о возможности опасного сближения судов и в случае опасного сближения судов определения вектора ускорения первого судна, перпендикулярного направлению отрезка, проведенного между судами, и по его величине и направлению задания этому судну режима движения, предотвращающего опасное сближение двух судов.
Согласно данному способу исходными данными для него являются координаты, скорости и курсы движения двух судов, а направление вектора ускорения, необходимого для предотвращения опасного сближения двух судов, принимается перпендикулярным направлению отрезка, проведенного между судами, что требует непременного изменения курса и, соответственно, линии движения судна. По этой причине становится невозможным управление движением судов для предотвращения их опасного сближения в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов.
Таким образом, известный способ «Алгоритм управления судном для предотвращения столкновений судов» по указанной причине не может быть использован для предотвращения опасного сближения двух судов в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов, что и является его недостатком.
Известный способ «Алгоритм управления судном для предотвращения столкновений судов» по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близким к заявляемому изобретению на способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения и рассматривается в дальнейшем в качестве способа-прототипа.
В основу изобретения положена задача создания способа предотвращения опасного сближения двух судов в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов.
Поставленная задача решается тем, что в способ предотвращения опасного сближения двух судов, в котором измеряют координаты, скорость и курс движения каждого судна, выбирают первое судно и вычисляют относительные координаты, относительную скорость и относительный курс первого судна, определяют крайние значения относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна и сравнивают их с текущим относительным курсом первого судна, затем формулируют вывод о возможности опасного сближения судов и в случае опасного сближения судов определяют вектор ускорения первого судна и по его величине и направлению задают этому судну режим движения, предотвращающий опасное сближение этих судов, дополнительно вводят вычисление множества достижимых значений его курсов и скоростей, при которых направление вектора его относительной скорости не пересекает зоны безопасности второго судна, определение из этого множества достижимых значений курсов и скоростей количества и местоположения точек, лежащих на отрезке, выходящем из начала координат, имеющем направление вектора скорости первого судна и длину, равную максимальной достижимой скорости этого судна, вычисление множества значений величины вектора ускорения первого судна, параллельного вектору скорости этого судна, которое вычисляют из условия удовлетворения системе из уравнения и неравенства, экстраполирующей изменение в процессе движения судов расстояния между судами и задающей минимум этого расстояния, равный минимально допустимому безопасному расстоянию между судами, выбор из последнего множества величины вектора ускорения, с учетом величины максимально достижимого значения ускорения первого судна при работе его двигательной установки в режиме максимальной мощности, а также с учетом обеспечения минимального достаточного изменения режима работы двигательной установки первого судна, вследствие чего по выбранной величине и направлению вектора ускорения первого судна, параллельного вектору его скорости, задают последнему режим движения без изменения линии движения, предотвращающий опасное сближение двух судов в ограниченных водах.
В заявленном способе предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения общими существенными признаками для него и для его способа-прототипа являются:
- измерение координат, скорости и курса движения каждого судна;
- выбор первого судна и вычисление относительных координат, относительной скорости и относительного курса первого судна;
- определение крайних значений относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна и сравнение их с текущим относительным курсом первого судна, затем формулировка вывода о возможности опасного сближения судов;
- определение вектора ускорения первого судна;
- задание по величине и направлению вектора ускорения первого судна его режима движения, предотвращающего опасное сближение судов.
Сопоставительный анализ существенных признаков заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения и способа-прототипа показывает, что первый, в отличие от способа-прототипа, имеет следующие существенные отличительные признаки:
- вычисление множества достижимых значений его курсов и скоростей, при которых направление вектора его относительной скорости не пересекает зоны безопасности второго судна;
- определение из этого множества достижимых значений курсов и скоростей количества и местоположение точек, лежащих на отрезке, выходящем из начала координат, имеющем направление вектора скорости первого судна и длину, равную максимальной достижимой скорости этого судна;
- вычисление множества значений величины вектора ускорения первого судна, параллельного вектору скорости этого судна, которое вычисляют из условия удовлетворения системе из уравнения и неравенства, экстраполирующей изменение в процессе движения судов расстояния между судами и задающей минимум этого расстояния, равный минимально допустимому безопасному расстоянию между судами;
- выбор из последнего множества величины вектора ускорения с учетом величины максимально достижимого значения ускорения первого судна при работе его двигательной установки в режиме максимальной мощности, а также с учетом обеспечения минимального достаточного изменения режима работы двигательной установки первого судна;
- вычисленный вектор ускорения первого судна параллелен вектору его скорости;
- задание по величине и направлению вектора ускорения первого судна его режима движения без изменения линии движения, предотвращающего опасное сближение двух судов в ограниченных водах.
Совокупность общих существенных признаков и существенных отличительных признаков обеспечивает достижение технического результата.
Технический результат от применения заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения заключается в возможности предотвращения опасного сближения двух судов в ограниченных водах без изменения линии их движения и, тем самым, в предоставлении возможности управления судном при его движении в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов.
Данная совокупность общих и отличительных существенных признаков достаточна и необходима для достижения заявленного технического результата.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом, то есть благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, то есть оно явным образом не следует из уровня техники и пригодно для промышленного применения.
Сущность заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения поясняется чертежами:
фиг.1 - схема операций, реализующих способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения;
фиг.2 - иллюстрация модельных представлений, реализующих способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения;
фиг.3 - множество относительных скоростей движения судна с индексом 1, при которых направление вектора относительной скорости первого судна не пересекает зоны безопасности другого судна;
фиг.4 - множество значений курсов и скоростей судна с индексом 1, при которых направление его вектора относительной скорости не пересекает зоны безопасности другого судна;
фиг.5 - траектории движения двух судов, не совершающих маневра для предотвращения опасного сближения;
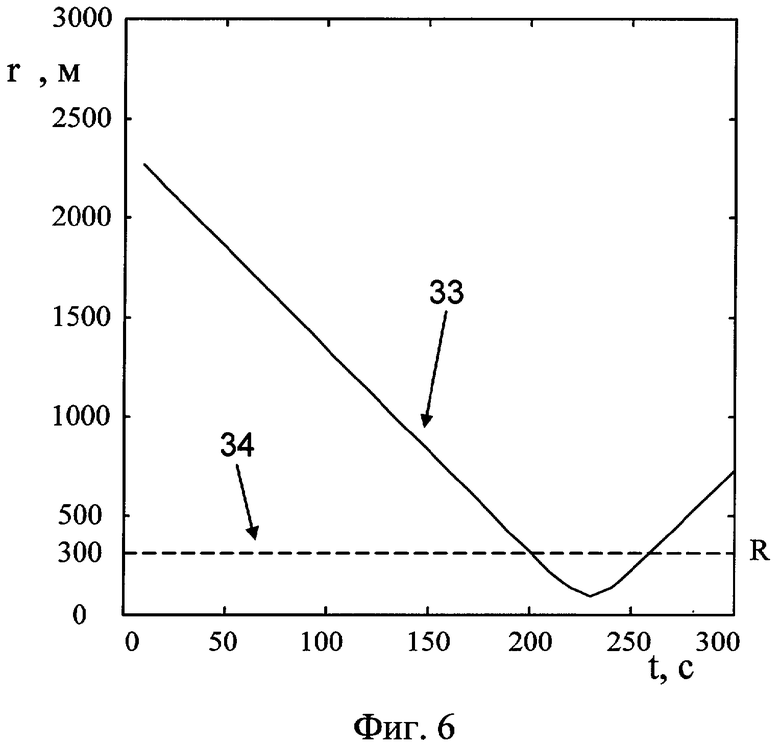
фиг.6 - изменение дистанции между судами для движения, изображенного на фиг.5;
фиг.7 - траектории движения судов, одно из которых совершает маневр для предотвращения опасного сближения согласно способу-прототипу;
фиг.8 - изменение дистанции между судами для движения, изображенного на фиг.7;
фиг.9 - траектории движения судов, одно из которых совершает маневр для предотвращения опасного сближения согласно заявленному способу;
фиг.10 - диаграмма, изображающая множество значений скоростей и курсов судна, соответствующих его безопасному движению, в момент начала маневра для предотвращения опасного сближения согласно заявленному способу;
фиг.11 - изменение дистанции между судами для движения, изображенного на фиг.9.
Заявленный способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения включает измерение координат, скоростей и курсов каждого судна (операции 1 и 2 (фиг.1)); выбор первого судна и вычисление относительных координат, относительной скорости и относительного курса первого судна (операция 3); определение крайних значений относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна и сравнения их с текущим относительным курсом первого судна, затем формулировки вывода о возможности опасного сближения судов (операция 4); вычисление множества достижимых значений его курсов и скоростей, при которых направление вектора его относительной скорости не пересекает зоны безопасности второго судна (операция 5); определение из этого множества достижимых значений курсов и скоростей количества и местоположение точек, лежащих на отрезке, выходящем из начала координат, имеющем направление вектора скорости первого судна и длину, равную максимальной достижимой скорости этого судна (операция 6); вычисление множества значений величины вектора ускорения первого судна, параллельного вектору скорости этого судна, которое вычисляют из условия удовлетворения системе из уравнения и неравенства, экстраполирующей изменение в процессе движения судов расстояния между судами и задающей минимум этого расстояния, равный минимально допустимому безопасному расстоянию между судами (операция 7); выбор из последнего множества величины вектора ускорения с учетом величины максимально достижимого значения ускорения первого судна при работе его двигательной установки в режиме максимальной мощности, а также с учетом обеспечения минимального достаточного изменения режима работы двигательной установки первого судна (операция 8); задание по величине и направлению вектора ускорения первого судна его режима движения без изменения линии движения, предотвращающего опасное сближение двух судов в ограниченных водах (операция 9).
Реализация заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения системами управления движением судов происходит следующим образом.
Измерительным устройством (на основе радара или системы глобального позиционирования (GPS), операция 1 и 2, фиг.1) в каждый момент времени измеряют координаты х1, у1 судна с индексом 1 и x2, у2 судна с индексом 2 (в неподвижной прямоугольной системе координат, связанной с поверхностью моря), скорость v1 судна с индексом 1, скорость v2 судна с индексом 2, курс k1 судна с индексом 1, курс k2 судна с индексом 2.
Пусть в качестве первого судна без потери общности выбрано судно с индексом 1. На основе измеренных координат, скоростей и курсов судов вычисляют (операция 3, фиг.1) относительные координаты первого судна х=х2-х1, у=у2-у1, относительную скорость первого судна  , где vx=v1sink1-v2sink2, vу=v1cosk1-v2cosk2, и относительный курс первого судна k. В данном случае k это угол направления вектора с компонентами (vx, vу), который может быть вычислен, например, согласно правилам:
, где vx=v1sink1-v2sink2, vу=v1cosk1-v2cosk2, и относительный курс первого судна k. В данном случае k это угол направления вектора с компонентами (vx, vу), который может быть вычислен, например, согласно правилам:
 , если vу>0;
, если vу>0;
 , если vу<0, vx>0;
, если vу<0, vx>0;
 , если vу<0, vx<0.
, если vу<0, vx<0.
Далее на основе значений x, у, v, k определяют крайние значения относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна, и сравнивают их с текущим относительным курсом первого судна, затем формулируют вывод о возможности опасного сближения судов (операция 4, фиг.1). При этом вводится величина d, равная 1, если суда распознаны как потенциально опасно сближающиеся и 0 в противном случае. Операция 4 реализуется следующим образом.
Рассмотрим фиг.2. Здесь 10 - точка положения судна с индексом 1, 11 - точка положения судна с индексом 2; 12 - вектор с компонентами (v1sink1, v1cosk1) - вектор скорости судна с индексом 1, 13 - вектор с компонентами (v2sink2, v2cosk2) - вектор скорости судна с индексом 2; 14 - вектор с компонентами (vx, vу) - вектор относительной скорости движения судна с индексом 1; 15 - вектор с компонентами (х, у) - вектор относительных координат судна с индексом 1; 16 - окружность радиуса R (здесь R - минимально допустимое безопасное расстояние между судами), с центром в точке положения судна с индексом 2, ограничивающая зону безопасности судна с индексом 2; 17 - отрезки с началом в точке положения судна с индексом 1 и концами в точке касания с окружностью 16; q - угол между вектором 15 и отрезком 17, характеризующий крайние значения относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна, так что
h - угол между вектором 15 и вектором 14, характеризующий текущий относительный курс судна с индексом 1, так что
 .
.
Движение судов считается ведущим к опасному сближению в том случае, когда направление вектора 14 пересекает окружность 16 (как на фиг.2), то есть h<q. Результатом операции 4 является величина d, равная 1, если суда распознаны как потенциально опасно сближающиеся, и 0 в противном случае.
Операции 1, 2, 3 и 4 (заштрихованы на фиг.1) являются общими для способа-прототипа и заявленного способа.
Далее, в случае, если операцией 4 суда распознаны как опасно сближающиеся (то есть d=1), то производится вычисление (операция 5, фиг.1) множества достижимых значений курсов и скоростей первого судна, при которых направление вектора его относительной скорости не пересекает зоны безопасности второго судна. Данное вычисление происходит следующим образом.
Рассмотрим фиг.3. Введем декартову систему координат с началом в точке положения судна с индексом 1, по осям которой откладываются значения компонент вектора относительной скорости судна с индексом 1. Здесь 18 - точка положения судна с индексом 2, соответствующая точке 10, фиг.2; 19 - вектор с компонентами (vx, vy) - вектор относительной скорости движения судна с индексом 1, соответствующий вектору 14, фиг.2; 20 - лучи, соответствующие отрезкам 17, фиг.2 (т.е. с началом в точке положения судна с индексом 1 и направленные так, что отрезки 17 лежат на лучах 20); 21 (заштрихованная область) - множество точек концов вектора 19 относительной скорости движения судна с индексом 1, для которых выполняется неравенство h<q, то есть соответствующих таким направлениям вектора относительной скорости судна с индексом 1, что оно не пересекает зоны безопасности другого судна (особо подчеркнем, что множество 21 неограниченно).
На основании множества 21 вычислим теперь множество достижимых значений курсов и скоростей судна с индексом 1, при которых направление вектора его относительной скорости не пересекает зоны безопасности другого судна. Для этого перейдем от его относительного движения к абсолютному по правилу v1sink1=v2sink2+vx, v1cosk1=v2cosk2+vy, то есть осуществим плоскопараллельный перенос множества векторов относительной скорости 21 в направлении вектора скорости судна с индексом 2 с компонентами (v2sink2, v2cosk2) на расстояние, равное длине этого вектора, - иллюстрация на фиг.4. Здесь по осям координат откладываются значения компонент вектора скорости судна с индексом 1. 22 - точка, получаемая путем перенесения в направлении вектора скорости судна с индексом 2 с компонентами (v2sink2, v2cosk2) на расстояние, равное длине этого вектора, точки положения судна с индексом 1, т.е. точки 11, фиг.2 и точки 18, фиг.3; 23 - вектор с компонентами (vx+v2sink2, vy+v2cosk2) - вектор относительной скорости движения судов, перенесенный в направлении вектора скорости судна с индексом 2 с компонентами (v2sink2, v2cosk2) на расстояние, равное длине этого вектора, и соответствующий вектору 14, фиг.2 и вектору 19, фиг.3; 24 - лучи 20, перенесенные в направлении вектора скорости судна с индексом 2 с компонентами (v2sink2, v2cosk2) на расстояние, равное длине этого вектора; 25 - окружность с центром в начале координат и радиусом v1 max, равным максимальной (максимально возможной) скорости движения судна с индексом 1; 26 (заштрихованная область) - ограниченное окружностью 25 множество 21, перенесенное в направлении вектора скорости судна с индексом 2 с компонентами (v2sink2, v2cosk2) на расстояние, равное длине этого вектора. Множество 26 представляет собой, таким образом, множество достижимых значений курсов и скоростей судна с индексом 1, при которых направление вектора его относительной скорости не пересекает зоны безопасности другого судна. Обозначим множество 26 буквой А, именно множество А является результатом операции 5, фиг.1.
Далее, производят определение (операция 6, фиг.1) из вычисленного по результатам операции 5 множества достижимых значений курсов и скоростей количества и местоположения точек, лежащих на отрезке, выходящем из начала координат, имеющем направление вектора скорости первого судна и длину, равную максимальной достижимой скорости этого судна. Данное определение производится следующим образом.
Рассмотрим отрезок длины v1 max, выходящий из точки начала координат и имеющий направление, совпадающее с направлением вектора скорости судна с индексом 1, - на фиг.4 это отрезок 27 и вектор 28 (вектор 28 - это вектор скорости судна с индексом 1, он имеет величину V1). Введем величину g. В том случае, если на этом отрезке не найдется ни одной точки, принадлежащей множеству 26 (то есть при текущем курсе судна с индексом 1 нет таких реально достижимых значений скорости, при которых направление вектора его относительной скорости не пересекает зоны безопасности другого судна, или, другими словами, таких реально достижимых значений скорости, которые бы не допускали опасное сближение судов), то величине g присваивается значение g=1. Если на отрезке длины v1 max, выходящем из точки начала координат и имеющем направление, совпадающее с направлением вектора скорости судна с индексом 1, имеются точки, принадлежащие множеству 26 и соответствующие только значениям скорости судна с индексом 1, меньшим текущего значения v1, - как на фиг.4 (то есть при текущем курсе судна с индексом 1 нужно уменьшить его скорость, чтобы направление вектора его относительной скорости перестало пересекать зону безопасности другого судна, или, другими словами, чтобы суда перестали опасно сближаться), то величине g присваивается значение g=2. Если на отрезке длины v1 max, выходящем из точки начала координат и имеющем направление, совпадающее с направлением вектора скорости судна с индексом 1, имеются точки, принадлежащие множеству 26 и соответствующие только значениям скорости судна с индексом 2, большим текущего значения v1 (то есть при текущем курсе судна с индексом 1 нужно увеличить его скорость, чтобы направление вектора его относительной скорости перестало пересекать зону безопасности другого судна, или, другими словами, чтобы суда перестали опасно сближаться), то величине g присваивается значение g=3. Если на отрезке длины v1 max, выходящем из точки начала координат и имеющем направление, совпадающее с направлением вектора скорости судна с индексом 1, имеются точки, принадлежащие множеству 26 и соответствующие как значениям скорости судна с индексом 1, меньшим текущего значения v1, так и значениям скорости судна с индексом 1, большим текущего значения v1 (то есть при текущем курсе судна с индексом 1 можно как увеличить, так и уменьшить его скорость, чтобы направление вектора его относительной скорости перестало пересекать зону безопасности другого судна, или, другими словами, чтобы суда перестали опасно сближаться), то величине g присваивается значение g=4. Именно значение g является результатом операции 6, фиг.1.
Далее из условия удовлетворения системе из уравнения и неравенства, экстраполирующей изменение в процессе движения судов расстояния между судами и задающей минимум этого расстояния, равный минимально допустимому безопасному расстоянию между судами, вычисляют (операция 7, фиг.1) множество значений величины вектора ускорения первого судна, параллельного вектору скорости этого судна. Данное вычисление происходит следующим образом.
Пусть в момент времени t0=0 имеются координаты, скорости и курсы судов x1, y1, v1, k1 и x2, y2, v2, k2. Пусть r(t) - расстояние между судами в момент времени t, a - величина вектора ускорения судна с индексом 1. Для того чтобы выполнялось условие движения судна с индексом 1 без изменения линии движения, необходимо, чтобы вектор ускорения судна с индексом 1 был параллелен вектору скорости судна с индексом 1, или, другими словами, направление вектора ускорения судна с индексом 1 было равно или противоположно направлению вектора скорости судна с индексом 1, то есть аx=asink1, ау=acosk1, где (аx, ау) - компоненты вектора ускорения судна с индексом 1. При таком представлении положительные значения величины а соответствуют направлению вектора ускорения судна в ту же сторону, куда направлен вектор его скорости, то есть увеличению скорости судна; отрицательные значения величины а соответствуют направлению вектора ускорения судна в сторону, обратную направлению вектора его скорости, то есть уменьшению скорости судна.
Квадрат расстояния между судами в момент времени t может быть вычислен следующим образом:
r2(t)=(x2-x1+(v2sink2-v1sink1)t-asink1t2/2)2+
(y2-y1+(v2cosk2-v1cosk1)t-acosk1t2/2)2=
(x-vxt-asink1t2/2)2+(у-vyt-acosk1t2/2)2.
Данное уравнение экстраполирует изменение в процессе движения судов расстояния между ними.
Производная по времени от квадрата расстояния между судами может быть вычислена следующим образом:

Значение t, при котором  задает момент времени, в который значение r2(t), а значит и расстояние между судами r(t) достигает минимального значения. Другими словами, значение минимального расстояния между судами в течение всего процесса их движения может быть вычислено как
задает момент времени, в который значение r2(t), а значит и расстояние между судами r(t) достигает минимального значения. Другими словами, значение минимального расстояния между судами в течение всего процесса их движения может быть вычислено как
rmin=r(t*),
где t* есть решение уравнения  .
.
Для того чтобы в процессе движения суда не сблизились на недопустимо малое расстояние, необходимо выполнение условия
rmin>R
или равносильного ему условия
r2(t*)>R2,
где R - минимально допустимое безопасное расстояние между судами. Данное неравенство задает минимум расстояния между судами, равный минимально допустимому безопасному расстоянию между судами.
Таким образом, удовлетворить условие rmin>R могут только те значения а величины вектора ускорения судна с индексом 1, которые превращают в верную систему из уравнения и неравенства (то есть удовлетворяют ей) 
Обозначим эту систему из уравнения и неравенства буквой Z. Множество значений а величины вектора ускорения судна с индексом 1, удовлетворяющих системе Z, вычисляется следующим образом. Введем множество величин ai, таких что i изменяется в пределах от -N до N, причем а-N=-а1 max, aN=а1 max, ai+1-аi=Δа. Здесь а1 max - максимально достижимое значение ускорения судна с индексом 1 при работе его двигательной установки в режиме максимальной мощности, Δа - разность между «соседними» значениями ai. Будем последовательно, от i=-N до i=N, перебирать величины аi, присваивать их переменной а, входящей в систему Z, и проверять, удовлетворяет ли каждое конкретное а = ai системе Z. Для этого из второго уравнения системы Z будем находить соответствующее каждому конкретному а = аi значение t* (например, численным методом Ньютона решения алгебраических уравнений [3]). Затем каждое конкретное значение а = ai и соответствующее ему найденное значение t* будем подставлять в первое неравенство системы Z. Если при этих конкретных а = аi и t* первое неравенство системы Z будет верным, это значит, что конкретно взятое значение аi удовлетворяет неравенству Z. Все последовательно перебранные ai, удовлетворяющие неравенству Z, назовем множеством В. Именно множество В и представляет собой вычисляемое по результатам операции 7, фиг.1, множество значений величины вектора ускорения первого судна, параллельного вектору скорости этого судна, и вычисление его происходит из условия удовлетворения системе из уравнения и неравенства, экстраполирующей изменение в процессе движения судов расстояния между судами и задающей минимум этого расстояния, равный минимально допустимому безопасному расстоянию между судами. Множество В, как это следует из способа его вычисления, обладает тем свойством, что судно, движущееся с ускорением, принадлежащим соответствующему этому судну множеству В, не приблизится к другому судну на недопустимо малое расстояние.
Далее выбирают (операция 8, фиг.1) из последнего множества (то есть из множества В) величину вектора ускорения с учетом величины максимально достижимого значения ускорения первого судна при работе его двигательной установки в режиме максимальной мощности, а также с учетом обеспечения минимального достаточного изменения режима работы двигательной установки первого судна. Данный выбор производится следующим образом.
Результатом операции 8 будет значение величины вектора ускорения аc.
Введем величину аd, равную наибольшему из отрицательных значений (т.е. аd<0), принадлежащих множеству В, и величину au, равную наименьшему из положительных значений (т.е. au>0), принадлежащих множеству В. Величина аd характеризует, таким образом, минимально необходимую величину вектора ускорения судна, необходимого для его безопасного движения, параллельного вектору скорости этого судна и приводящего к уменьшению скорости судна, а величина au - минимально необходимую величину вектора ускорения судна, необходимого для его безопасного движения, параллельного вектору скорости этого судна и приводящего к увеличению скорости судна. Если множество В не содержит отрицательных величин, то добавим в него величину аd=-а1 max; если множество В не содержит положительных величин, то добавим в него величину au=a1 max.
Если g=1, то согласно операции 6, фиг.1, при текущем курсе судна с индексом 1 нет таких реально достижимых значений его скорости, при которых направление вектора его относительной скорости не пересекает зоны безопасности другого судна, или, другими словами, таких реально достижимых значений скорости, которые бы не допускали опасное сближение судов. В этом случае для предотвращения опасного сближения необходимо изменить направление движения судна с индексом 1 на реверсивное, то есть отработать двигательной установкой судна «назад» таким образом, чтобы величина вектора его ускорения ac, параллельного вектору скорости судна, стала равной какому-либо отрицательному значению из множества В. При этом отработку двигательной установкой судна необходимо начать лишь в тот момент времени, когда значение отношения  превысит некоторое наперед заданное пороговое значение f, и закончить тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=1 в случае, если
превысит некоторое наперед заданное пороговое значение f, и закончить тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=1 в случае, если  <f или d=0, то ac=0; если же >f и d=1, то аc принимает какое-либо отрицательное значение из множества В.
<f или d=0, то ac=0; если же >f и d=1, то аc принимает какое-либо отрицательное значение из множества В.
Если g=2, то согласно операции 6, фиг.1, при текущем курсе судна с индексом 1 нужно уменьшить его скорость, чтобы направление вектора его относительной скорости перестало пересекать зону безопасности другого судна, или, другими словами, чтобы суда перестали опасно сближаться. В этом случае для предотвращения опасного сближения необходимо отработать двигательной установкой судна таким образом (например, «назад», или выключить двигатель, или уменьшить его мощность), чтобы величина вектора его ускорения аc, параллельного вектору скорости судна, стала равной какому-либо отрицательному значению из множества В. Отработка двигательной установкой судна начинается в тот момент времени, когда значение отношения превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=2 в случае, если <f или d=0, то аc=0; если же >f и d=1, то аc принимает какое-либо отрицательное значение из множества В.
Если g=3, то согласно операции 6, фиг.1, при текущем курсе судна с индексом 1 нужно увеличить его скорость, чтобы направление вектора его относительной скорости перестало пересекать зону безопасности другого судна, или, другими словами, чтобы суда перестали опасно сближаться. В этом случае для предотвращения опасного сближения необходимо отработать двигательной установкой судна «вперед» таким образом, чтобы величина вектора его ускорения аc, параллельного вектору скорости судна, стала равной какому-либо положительному значению из множества В. Отработка двигательной установкой судна начинается в тот момент времени, когда значение отношения  превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=3 в случае, если
превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=3 в случае, если  <f или d=0, то ac=0; если же >f и d=1, то аc принимает какое-либо положительное значение из множества В.
<f или d=0, то ac=0; если же >f и d=1, то аc принимает какое-либо положительное значение из множества В.
Если g=4, то согласно операции 6, фиг.1, при текущем курсе судна с индексом 1 нужно или увеличить, или уменьшить его скорость, чтобы направление вектора его относительной скорости перестало пересекать зону безопасности другого судна, или, другими словами, чтобы суда перестали опасно сближаться.
Если при g=4 имеет место au>|ad|, то из множества ускорений В, которые предотвращают опасное сближение судов, меньшее по модулю значение имеет ускорение, соответствующее уменьшению скорости судна. В этом случае для предотвращения опасного сближения необходимо отработать двигательной установкой судна таким образом (например, «назад», или выключить двигатель, или уменьшить его мощность), чтобы величина вектора его ускорения аc, параллельного вектору скорости судна, стала равной какому-либо отрицательному значению из множества В. Отработка двигательной установкой судна начинается в тот момент времени, когда значение отношения превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=4 и au>|ad| в случае, если <f или d=0, то аc=0; если же >f и d=1, то аc принимает какое-либо отрицательное значение из множества В.
Если при g=4 имеет место au<|ad|, то из множества ускорений В, которые предотвращают опасное сближение судов, меньшее по модулю значение имеет ускорение, соответствующее увеличению скорости судна. В этом случае для предотвращения опасного сближения необходимо отработать двигательной установкой судна «вперед» таким образом, чтобы величина вектора его ускорения аc, параллельного вектору скорости судна, стала равной какому-либо положительному значению из множества В. Отработка двигательной установкой судна начинается в тот момент времени, когда значение отношения превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=4 и аu<|аd| в случае, если <f или d=0, то аc=0; если же  > f и d=1, то аc принимает какое -либо положительное значение из множества В.
> f и d=1, то аc принимает какое -либо положительное значение из множества В.
Если при g=4 имеет место аu=|аd|, то этот случай отрабатывается аналогично случаю au>|ad|, то есть для предотвращения опасного сближения необходимо отработать двигательной установкой судна таким образом (например, «назад», или выключить двигатель, или уменьшить его мощность), чтобы величина вектора его ускорения аc, параллельного вектору скорости судна, стала равной какому-либо отрицательному значению из множества В. Отработка двигательной установкой судна начинается в тот момент времени, когда значение отношения  превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=4 и аu=|аd| в случае, если <f или d=0, то ac=0; если же >f и d=1, то аc принимает какое-либо отрицательное значение из множества В.
превысит некоторое наперед заданное пороговое значение f, и заканчивается тогда, когда значение d, вычисленное по результатам операции 4, становится равным 0, то есть суда более не распознаются как опасно сближающиеся. Таким образом, при g=4 и аu=|аd| в случае, если <f или d=0, то ac=0; если же >f и d=1, то аc принимает какое-либо отрицательное значение из множества В.
Конкретные значения величины вектора ускорения аc судна с индексом 1 из множества В выбираются таким образом, чтобы обеспечивать минимальное достаточное изменение режима работы конкретной двигательной установки.
Далее задают (операция 9, фиг.1) по величине аc и направлению k1 вектора ускорения первого судна его режим движения без изменения линии движения, предотвращающего опасное сближение двух судов в ограниченных водах. Свойство неизменности линии движения судна следует из того, что направление вектора ускорения выбирается параллельным курсу движения первого судна k1. Если аc<0, то это значит, что вектор ускорения первого судна направлен в противоположную сторону относительно его вектора скорости. Если ac>0, то это значит, что вектор ускорения первого судна направлен в ту же сторону, что и его вектор скорости. Задание нужного режима движения происходит путем изменения режима работы двигательной установки соответствующим образом. Операция 9 (заштрихована на фиг.1) является общей для способа-прототипа и заявленного способа.
Таким образом, если в некоторый момент времени по результатам операций 1, 2, 3, 4 движение судов распознается как ведущее к их опасному сближению, то по результатам операций 5, 6, 7 и 8 вычисляется величина вектора ускорения одного из судов, параллельного вектору скорости этого судна (то есть не изменяющего линии движения судна) и обладающего тем свойством, что судно, движущееся с указанным ускорением, не приблизится к другому судну на недопустимо малое расстояние. Операция 9 обеспечивает реализацию движения судна с заданным ускорением.
Заявленный способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения обеспечивает вычисление величин g, аd, au, aс и получение, соответственно, одного из результатов:
- изменение направления движения судна на реверсивное с ускорением аc, если g=1 (и при этом  , d=1);
, d=1);
- уменьшение скорости движения судна с ускорением аc, если g=2 или если g=4 и аu≥|аd| (и при этом  >f, d=1);
>f, d=1);
- увеличение скорости движения судна с ускорением аc, если g=3 или если g=4 и аu<|аd| (и при этом  >f, d=1).
>f, d=1).
Во всех случаях при этом достигается предотвращение опасного сближения судов без изменения линии их движения.
Это обуславливает у заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения свойство предотвращать опасное сближение двух судов в ограниченных водах без изменения линии их движения и, тем самым, предоставлять возможность управления судном при его движении в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов.
В настоящее время устройство, реализующее заявленный способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения, находится в стадии численного моделирования и включает в себя:
- измерительное устройство, обеспечивающее измерение координат и скоростей судов;
- два сближающихся судна.
Модель устройства, реализующего заявленный способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения имеет следующие параметры:
- минимальное безопасное расстояние между судами R=300 м;
- максимальное значение ускорения судна а1 max=0.03 м/с2;
- максимальное значение скорости судна v1 max=20 м/с;
- оптимальный штатный режим двигательной установки судна при маневрировании соответствует значению ускорения |а1|=0.02 м/с2;
- при нахождении множества В разность между «соседними» значениями ускорений равна Δа=0.001 м/с2;
- пороговое значение f отношений и равно f=0.5.
Результаты моделирования представлены на фиг.5-11.
На фиг.5 показано движение судов, не совершающих маневра для предотвращения опасного сближения. Скорость одного из них - 29 - равна 6.5 м/с, скорость другого - 30 - равна 8 м/с. Здесь 31 - траектория судна с индексом 1, 32 - траектория судна с индексом 2.
На фиг.6 представлен график изменения дистанции между судами для движения, изображенного на фиг.5. Здесь 33 - значение минимального безопасного расстояния между судами R=300 м, 34 - значение дистанции между судами с течением времени. Видно, что в результате движения судов без маневра для предотвращения опасного сближения суда сближаются на недопустимо малую дистанцию.
На фиг.7 показано движение судов, одно из которых - 35 - совершает маневр для предотвращения опасного сближения согласно способу-прототипу. Здесь 36 - другое судно, 37 - границы участка траектории судна 35, на котором оно совершает маневр для предотвращения опасного сближения согласно способу-прототипу.
На фиг.8 представлен график изменения дистанции между судами для движения, изображенного на фиг.7. Здесь 38 - значение минимального безопасного расстояния между судами R=300 м, 39 - значение дистанции между судами с течением времени.
Из фиг.7 и 8 видно, что в результате предпринятого судном 29 маневра для предотвращения опасного сближения согласно способу-прототипу удается предотвратить опасное сближение судов. Однако такой маневр приводит к значительному изменению курса и, соответственно, линии движения судна, что при его движении в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов, оказывается неприемлемым.
На фиг.9 показано движение судов, одно из которых - 40 - совершает маневр для предотвращения опасного сближения согласно заявленному способу. Здесь 41 - другое судно, 42 - границы участка траектории судна 40, на котором оно совершает маневр (изменяя только скорость движения, без изменения линии движения) для предотвращения опасного сближения согласно заявленному способу.
На фиг.10 представлена диаграмма, изображающая множество достижимых значений курсов и скоростей судна 40, при которых направление вектора его относительной скорости не пересекает зоны безопасности судна 41, в момент начала маневра судна 40 для предотвращения опасного сближения судов 40 и 41 согласно заявленному способу. Здесь 43 (заштрихованная область) - множество достижимых значений курсов и скоростей судна 40, при которых направление вектора его относительной скорости не пересекает зоны безопасности судна 41, в момент начала маневра судна 40 для предотвращения опасного сближения судов 40 и 41 согласно заявленному способу; 44 - вектор скорости судна 40, k1 - курс судна 40, v1 - скорость судна 40. Из фиг.10 видно, что на отрезке длины v1 max=20 м/с, выходящем из точки начала координат и имеющем направление, совпадающее с направлением вектора 44 скорости судна 40, имеются точки, принадлежащие множеству 43 и соответствующие как значениям скорости судна 40, меньшим текущего значения v1, так и значениям скорости судна 40, большим текущего значения v1 (то есть при текущем курсе судна 40 для того, чтобы не допустить опасное сближение судов, можно как уменьшить, так и увеличить его скорость), то есть величина g равна в данном случае g=4. При этом в начале маневрирования вычисленные значения величины аd - наибольшего из отрицательных значений, принадлежащих множеству В, и величины au - наименьшего из положительных значений, принадлежащих множеству В, равны аd=-0.015 м/с2, аu=0.03 м/с2. Так как аu> , то необходимо согласно содержанию операции 8 уменьшить скорость судна. Ускорение, соответствующее оптимальному режиму работы двигательной установки судна при маневрировании, a1=-0.02 м/с2 принадлежит при этом множеству В. Значение отношения равно при этом 0.5, то есть соответствует выбранному в качестве параметров модели значению f.
, то необходимо согласно содержанию операции 8 уменьшить скорость судна. Ускорение, соответствующее оптимальному режиму работы двигательной установки судна при маневрировании, a1=-0.02 м/с2 принадлежит при этом множеству В. Значение отношения равно при этом 0.5, то есть соответствует выбранному в качестве параметров модели значению f.
На фиг.11 представлен график изменения дистанции между судами для движения, изображенного на фиг.9. Здесь 45 - значение минимального безопасного расстояния между судами R=300 м, 46 - значение дистанции между судами с течением времени.
Из фиг.9 и 11 видно, что в результате предпринятого судном 40 маневра (с изменением только скорости и без изменения линии движения) для предотвращения опасного сближения согласно заявленному способу удается предотвратить опасное сближение судов. Следовательно, реализация заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения приводит к предотвращению опасного сближения двух судов в ограниченных водах без изменения линии их движения и, тем самым, предоставляет возможность управления судном при его движении в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов.
Из вышеизложенного следует, что реализуется поставленная заявленным способом задача предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения.
Описание способа и результаты макетирования, приведенные относительно судна с индексом 1, в равной мере могут быть отнесены и к судну с индексом 2, что вкупе с тем, что описанная процедура реализуется в реальном масштабе времени, подтверждает достижение технического результата от применения заявленного способа предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения.
Источники информации
1. Чуркин В.И. Оптимальное управление расхождением судов. Изв. АН. Теория и системы управления. 1999. №2.
2. Р.А. Wilson, C.J. Harris and X. Hong A Line Of Sign Counteraction Navigation Algorithm For Ship Encounter Collision Avoidance // The Journal Of Navigation, 2003, Vol.56, pp.111-121 - прототип.
3. Амосов А.А., Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров. М.: Высш. шк. 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ МАНЕВРИРУЮЩИХ СУДОВ | 2005 |
|
RU2309083C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ | 2004 |
|
RU2262466C1 |
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| ШТУРМАНСКИЙ ПРИБОРIВсесоюзная; riR^'^-HTHo-ToxistHf _.;{ая--•^^L-_«.jii.ьиолнотека• | 1969 |
|
SU243855A1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2334996C2 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| СИСТЕМА РАЗДЕЛЕНИЯ ВОЗДУШНЫХ СУДОВ ПРИ ДВИЖЕНИИ | 2012 |
|
RU2601968C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |









Изобретение относится к области управления движением судов и предназначено для предотвращения опасного сближения судов в ограниченных водах. Способ реализуется тем, что измеряют координаты, скорость и курс движения каждого судна, выбирают первое судно и вычисляют относительные координаты, скорость и курс первого судна. Затем определяют крайние значения относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна и сравнивают их с текущим относительным курсом первого судна и формулируют вывод о возможности опасного сближения судов. В случае опасного сближения судов вычисляют множество достижимых значений его курсов и скоростей, определяют из этого множества количество и местоположение точек, лежащих на отрезке, выходящем из начала координат, имеющем направление вектора скорости первого судна и длину, равную максимальной достижимой скорости этого судна. Определяют множество значений величины вектора ускорения первого судна, из этого множества выбирают величину вектора ускорения. По выбранной величине и направлению вектора ускорения первого судна задают последнему режим движения без изменения линии движения, предотвращающий опасное сближение двух судов в ограниченных водах. Техническим результатом изобретения является предотвращение опасного сближения двух судов без изменения линии их движения и, тем самым, возможность управления судами при их движении в ограниченных водах, где геометрия фарватеров делает невозможным изменение линии движения судов. 11 ил.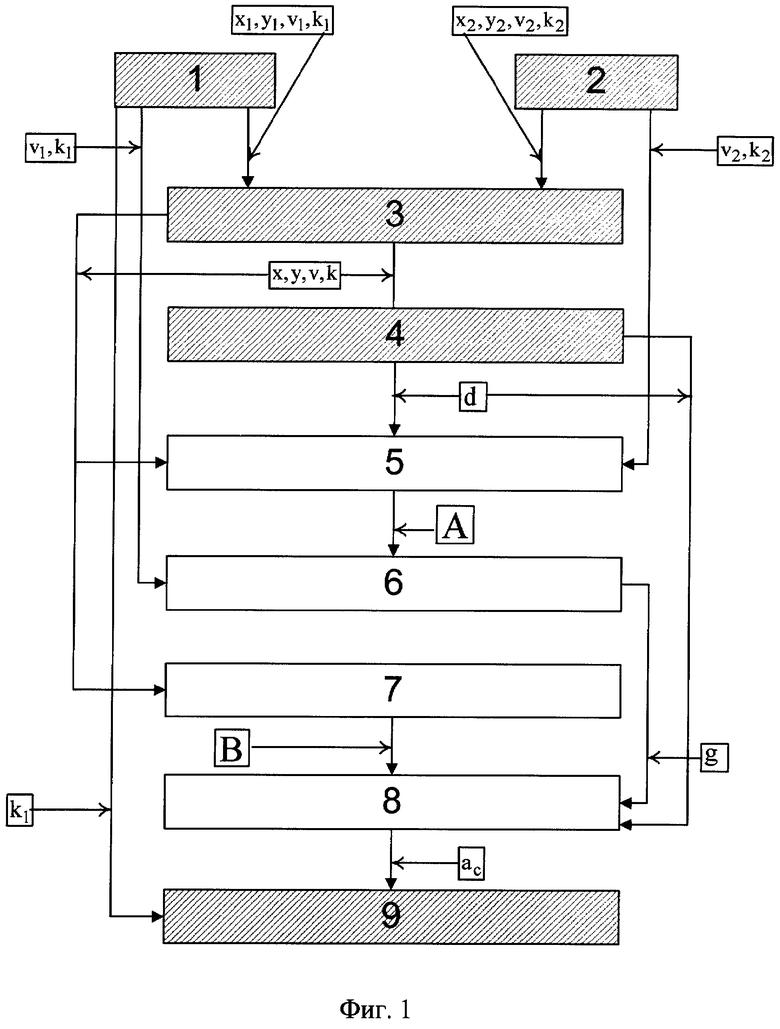
Способ предотвращения опасного сближения двух судов в ограниченных водах без изменения линии движения, в котором измеряют координаты, скорость и курс движения каждого судна, выбирают первое судно и вычисляют относительные координаты, относительную скорость и относительный курс первого судна, определяют крайние значения относительных курсов первого судна, соответствующих пересечению с направлением его вектора относительной скорости зоны безопасности второго судна и сравнивают их с текущим относительным курсом первого судна, затем формулируют вывод о возможности опасного сближения судов и в случае опасного сближения судов определяют вектор ускорения первого судна и по его величине и направлению задают этому судну режим движения, предотвращающий опасное сближение этих судов, отличающийся тем, что определяют вектор ускорения первого судна путем вычисления множества достижимых значений его курсов и скоростей, при которых направление вектора его относительной скорости не пересекает зоны безопасности второго судна, определяют из этого множества достижимых значений курсов и скоростей количество и местоположение точек, лежащих на отрезке, выходящем из начала координат, имеющем направление вектора скорости первого судна и длину, равную максимальной достижимой скорости этого судна, множество значений величины вектора ускорения первого судна, параллельного вектору скорости этого судна, вычисляют из условия удовлетворения системе из уравнения и неравенства, экстраполирующей изменение в процессе движения судов расстояния между судами и задающей минимум этого расстояния, равный минимально допустимому безопасному расстоянию между судами, выбирают из последнего множества величину вектора ускорения с учетом величины максимально достижимого значения ускорения первого судна при работе его двигательной установки в режиме максимальной мощности, а также с учетом обеспечения минимального достаточного изменения режима работы двигательной установки первого судна, по выбранной величине и направлению вектора ускорения первого судна задают последнему режим движения без изменения линии движения, предотвращающий опасное сближение двух судов в ограниченных водах.
| Вычислительная система "Антикон" для предотвращения столкновения судов | 1983 |
|
SU1136178A1 |
| US 3717873 A1, 20.02.1973 | |||
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ЧАСТОТЫ СИГНАЛА С НЕИЗВЕСТНОЙ НАЧАЛЬНОЙ ФАЗОЙ | 1990 |
|
RU2012011C1 |

