Изобретение относится к области автоматического регулирования, а конкретно к приводам наведения и стабилизации инерционных объектов, обладающих значительной неуравновешенностью, например приводам наведения артиллерийского вооружения подвижных объектов.
Известны приводы [1], предназначенные для использования в качестве исполнительных в условиях значительной неуравновешенности нагрузки, в которых для компенсации неуравновешенности используется третья полость исполнительного гидроцилиндра, запитываемая постоянным давлением от гидроаккумулятора. Однако это техническое решение не обеспечивает нормальное функционирование изделия при резких колебаниях величины нагрузки на привод.
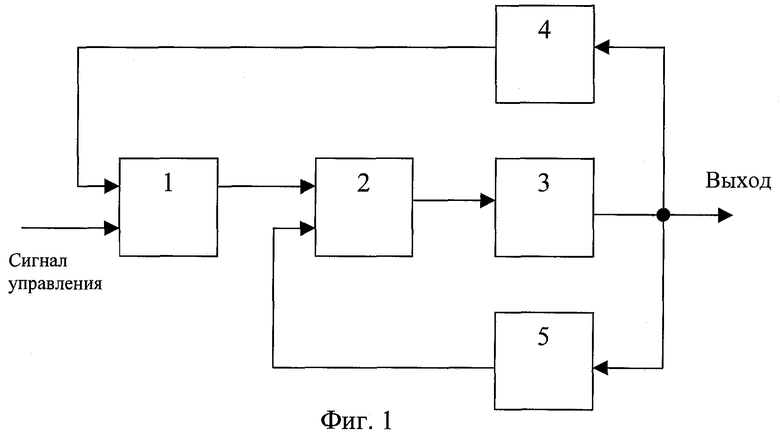
Известен следящий привод [2] (принятый за прототип), который содержит (фиг.1) последовательно соединенные сумматор 1, усилитель 2, исполнительный привод 3 и датчик положения нагрузки 4, выход которого соединен с первым входом сумматора 1. Второй вход сумматора 1 является управляющим входом. Выход исполнительного привода 3 является выходом следящего привода, на котором может устанавливаться инерционная нагрузка. Кроме того, для повышения устойчивости следящий привод содержит датчик скорости 5 нагрузки, вход которого подключен к выходу исполнительного привода 3, а выход - ко второму входу усилителя 2.
К недостатку данного привода относится отсутствие защиты от выхода из строя силовых элементов исполнительного привода в случае перегрузки привода при аварийной остановке нагрузки в процессе отработки управляющих сигналов. Аварийная остановка нагрузки может произойти:
при нештатном срабатывании тормозных устройств, предназначенных для удержания неуравновешенной нагрузки при выключенных приводах;
при заклинивании силовых редукторов;
при упоре нагрузки в случайное препятствие и т.п.
Изобретение направлено на повышение надежности следящего привода за счет введения в него защиты от недопустимой перегрузки силовых элементов привода при аварийной остановке нагрузки.
Сущность предлагаемого технического решения заключается в том, что в следящий привод, содержащий последовательно соединенные сумматор, усилитель, исполнительный привод и датчик положения нагрузки, выход которого соединен с первым входом сумматора, причем второй вход сумматора является управляющим входом, а выход исполнительного привода является выходом следящего привода, а также датчик скорости, вход которого связан с выходом исполнительного привода, а выход - с вторым входом усилителя, введены последовательно соединенные первый компаратор, схема И, реле времени и схема блокировки, выход которой соединен с вторым входом исполнительного привода, вход первого компаратора соединен с выходом сумматора, а также второй компаратор, вход которого соединен с выходом датчика скорости, а выход - со вторым входом схемы И.
Материалы заявки поясняются чертежами, где представлены:
на фиг.1 - блок-схема следящего привода, принятого за прототип;
на фиг.2 - блок-схема предлагаемого следящего привода;
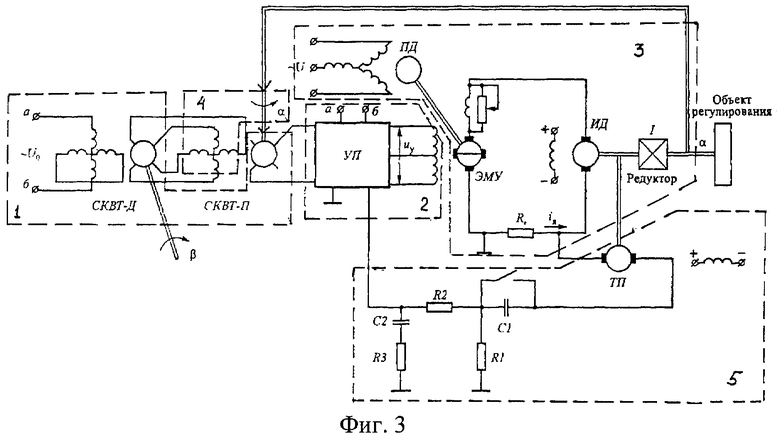
на фиг.3 - схемная реализация прототипа [2].
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше результата, изложены по блок-схеме следящего привода, представленной на фиг.2.
Предлагаемый следящий привод содержит последовательно соединенные сумматор 1, усилитель 2, исполнительный привод 3 и датчик положения нагрузки 4, выход которого соединен с первым входом сумматора 1, причем второй вход сумматора 1 является управляющим входом. Выход исполнительного привода 3 является выходом следящего привода. Следящий привод также содержит датчик скорости 5, вход которого связан с выходом исполнительного привода 3, а выход - с вторым входом усилителя 2.
Предлагаемый следящий привод отличается от прототипа (фиг.1) тем, что в него введены последовательно соединенные первый компаратор 6, схема И 7, реле времени 8 и схема блокировки 9, выход которой соединен с вторым входом исполнительного привода 3. Вход первого компаратора 6 соединен с выходом сумматора 1. Также в следящий привод введен второй компаратор 10, вход которого соединен с выходом датчика скорости 5, а выход - со вторым входом схемы И 7.
Принцип действия предлагаемого привода заключается в том, что если в процессе отработки сигналов управления случается аварийная остановка нагрузки привода, то на выходе сумматора 1 резко возрастает ошибка рассогласования. При превышении ошибкой рассогласования порога срабатывания первого компаратора 6 на его выходе появляется сигнал «1», который поступает на первый вход схемы И 7. Одновременно с этим, вследствие отсутствия движения нагрузки привода, сигнал на выходе датчика скорости 5 снижается ниже порога срабатывания второго компаратора 10 и на его выходе появляется сигнал «1». Одновременное появление сигналов «1» на входах схемы И 7 вызывает появление сигнала «1» на его выходе. Этот сигнал запускает реле времени 8 и если время аварийной остановки нагрузки превысит допустимое значение, определяемое заданной уставкой реле времени 8, на выходе реле времени 8 появляется сигнал, запускающий в работу схему блокировки 9, подключенную ко второму входу исполнительного привода 3. Схема блокировки 9 построена таким образом, что при ее срабатывании снимается силовое питание исполнительного привода 3, предотвращая выход из строя его силовых элементов. Таким образом, предлагаемое техническое решение, в случае одновременного наличия в приводе ошибки выше допуска и отсутствии движения нагрузки в течение времени, определяемого уставкой реле времени, обеспечивает отключение силового питания исполнительного привода и тем самым защиту следящего привода от недопустимых перегрузок при аварийной остановке нагрузки.
Предлагаемое техническое решение проверено математическим моделированием, а также экспериментальной проверкой макетного образца привода. Результаты проверок подтвердили надежность защиты следящего привода от недопустимых перегрузок при аварийной остановке нагрузки.
По результатам экспериментальных исследований предлагаемое техническое решение использовано в документации следящего привода модернизированного изделия Д-73М.
Литература
1. Привод изделия П-800 ПБ1.331.082РЭ, ВНИИ "Сигнал", г.Ковров, 1992 г.
2. "Следящие приводы". Под редакцией Б.К.Чемоданова, том 2, М., Издательство МГТУ им. Н.Э.Баумана, 2003, стр.245.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2318232C2 |
| Привод наведения | 2024 |
|
RU2835457C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2050686C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Следящий привод | 2019 |
|
RU2723331C1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Электропривод переменного тока | 1988 |
|
SU1636980A2 |
| Стенд для испытаний на прочность | 1985 |
|
SU1392416A1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
Изобретение относится к области автоматического регулирования, а конкретно к приводам наведения и стабилизации инерционных объектов, обладающих значительной неуравновешенностью. Технический результат изобретения заключается в повышении надежности. Достигается технический результат за счет того, что в следящий привод содержит сумматор, усилитель, исполнительный привод, датчик положения нагрузки, датчик скорости, первый компаратор, второй компаратор, схема И, реле времени и схему блокировки. 3 ил.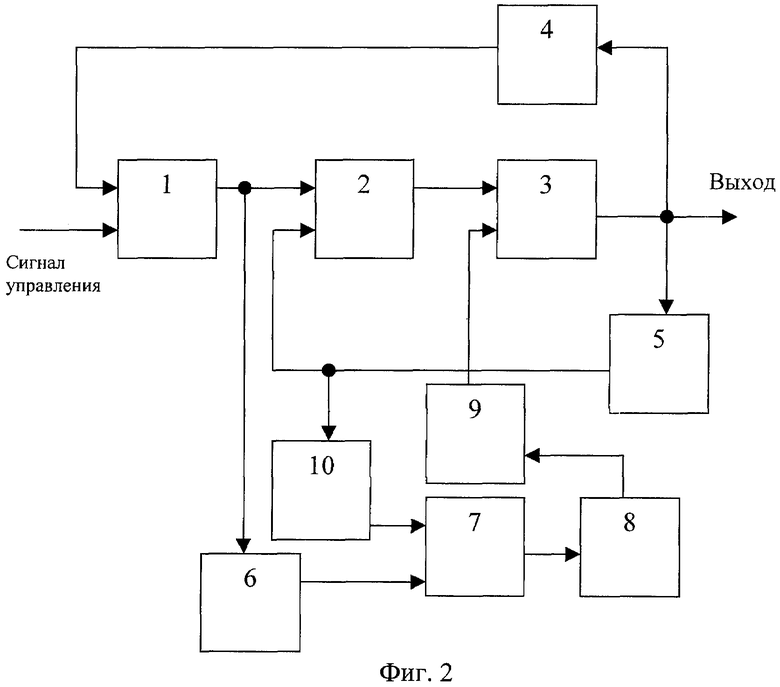
Следящий привод, содержащий последовательно соединенные сумматор, усилитель, исполнительный привод и датчик положения нагрузки, выход которого соединен с первым входом сумматора, причем второй вход сумматора является управляющим входом следящего привода, а выход исполнительного привода является выходом следящего привода, а также датчик скорости, вход которого связан с выходом исполнительного привода, а выход - с вторым входом усилителя, отличающийся тем, что в него введены последовательно соединенные первый компаратор с внутренним порогом срабатывания, схема И, реле времени и схема блокировки, выход которой соединен с вторым входом исполнительного привода, вход первого компаратора с внутренним порогом срабатывания соединен с выходом сумматора, а также второй компаратор с внутренним порогом срабатывания, вход которого соединен с выходом датчика скорости, а выход со вторым входом схемы И.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Следящий привод | 1982 |
|
SU1012198A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU851335A1 |
| WO 9807077 А1, 19.02.1998 | |||
| US 6794842 В2, 21.09.2004. | |||

