Предлагаемый способ настройки IR-компенсации в системах управления электроприводов переменного тока по косвенно определенному потокосцеплению статора предназначен для настройки систем управления электроприводов переменного тока.
Известны структуры с обратной связью по вычисленному потоку (Греков Э.Л. Автореферат диссертационной работы на соискание ученой степени кандидата технических наук «Разработка и исследование электроприводов основных механизмов экскаваторов по системе НПЧ-АД на базе эквивалентных шестипульсных схем». - Самара, 2003, стр.16), в которых также косвенно определяется потокосцепление.
В отличие от предлагаемого способа известный способ обладает следующими недостатками: необходим предварительный расчет параметров электродвигателя, отсутствует наглядность настройки, пренебрегается временное и температурное изменение активного сопротивления статора.
Прототипом предлагаемого способа является способ IR-компенсации в структурах с определением внутренней ЭДС (Эпштейн И.И. Автоматизированный электропривод переменного тока. М.: Энергоиздат, 1982, 192 с., ил., стр.18), в которых предлагается возможность ручной настройки IR-компенсации с помощью подстроечного резистора.
В отличие от предлагаемого способа известный способ обладает следующими недостатками: несмотря на возможность подстройки отсутствует критерий правильности настройки IR-компенсации, необходим предварительный расчет параметров электродвигателя.
Техническая задача, решаемая с помощью данного способа настройки IR-компенсации в системах управления электроприводов переменного тока по косвенно определенному потокосцеплению статора, состоит в обеспечении настройки системы управления без знания параметров электродвигателя, а также в наглядности настройки.
Поставленная задача решается тем, что настройка IR-компенсации осуществляется визуально по наличию колебательности в выходном модуле потокосцепления статора при установившемся режиме работы.
Структуры систем управления электроприводов переменного тока по косвенно определенному потокосцеплению статора основаны на получении информации о потокосцеплении статора из сигналов с датчиков тока и напряжения, установленных в фазах электродвигателя переменного тока.
При определении потокосцепления статора в ортогональных осях α, β оперируют выражениями (Ключев В.И. Теория электропривода. Учебник для вузов. - 2-е изд., перераб. и доп. - М.: Энергоатомиздат, 1998. - 704 с.: ил, стр.207)

где Ψ1α, Ψ1β - проекции вектора потокосцепления статора в осях α и β;
e1α, e1β - проекции вектора ЭДС в осях α и β;
U1α, U1β - проекции вектора напряжения статора в осях α и β;
i1α, i1β - проекции вектора тока статора в осях α и β;
R1 - активное сопротивление статора.
Модуль потокосцепления статора вследствие ортогональности осей α и β определяется по выражению

где |Ψ| - модуль потокосцепления статора.
Действия по выражениям 1, 2 могут быть осуществлены на базе аналоговых операционных усилителей или на микроконтроллере.
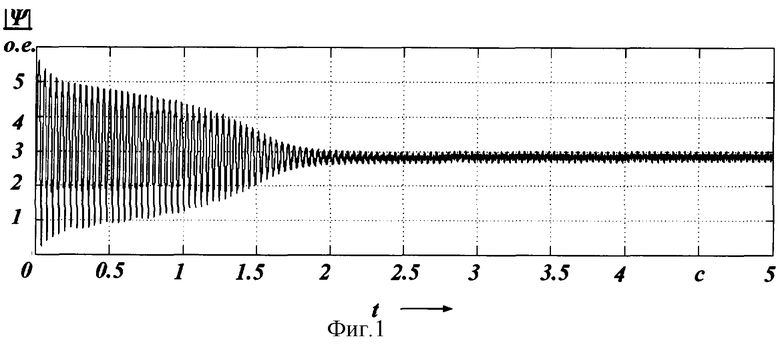
Осциллограмма модуля потокосцепления статора при точной настройке IR-компенсации имеет вид, представленный на фиг.1. Осциллограмма снята при амплитуде основного синусоидального сигнала 354 В, частоте 157 рад/с, прямом пуске и двойном моменте.
По представленной осциллограмме на фиг.1 видно, что при установившемся режиме работы колебательность модуля потокосцепления статора отсутствует.
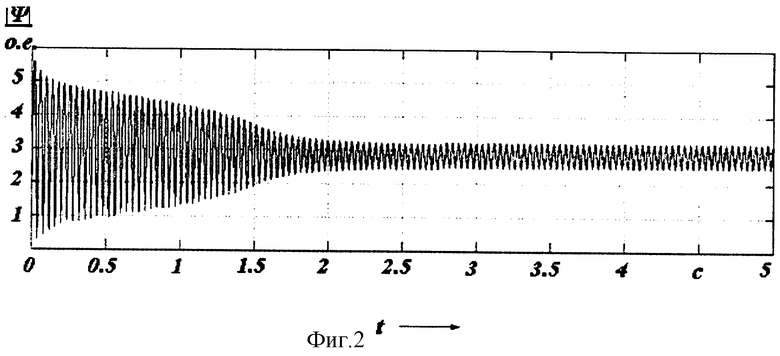
На фиг.2 представлена осциллограмма модуля потокосцепления статора при недокомпенсации на 10%. Осциллограмма снята при амплитуде основного синусоидального сигнала 354 В, частоте 157 рад/с, прямом пуске и двойном моменте.
По представленной осциллограмме на фиг.2 видно, что при установившемся режиме работы присутствует колебательность модуля потокосцепления статора. Колебательность проявляется как при недокомпенсации, так при перекомпенсации. При этом амплитуда колебаний с ростом недокомпенсации или перекомпенсации растет.
В предлагаемом способе настройки IR-компенсации в системах управления электроприводов переменного тока по косвенно определенному потокосцеплению статора в каналы токовой связи включены подстроечные резисторы. На фиг.3 представлена функциональная схема включения подстроечного резистора в канал токовой связи одной j-й фазы электродвигателя. Фиг.3 содержит резистор 1 в канале напряжения статора U1, резистор 2 в обратной связи операционного усилителя 3 и подстроечный резистор 4 в канале токовой связи минус I1. На выходе U2 функциональная схема обеспечивает суммирование сигнала напряжения статора U1 и токового сигнала статора минус I1. Регулируя подстроечный резистор 4, визуально контролируется минимум колебательности модуля потокосцепления статора при установившемся режиме работы, а следовательно, и точность настройки IR-компенсации. Резисторы 1 и 2 необходимы для согласования уровней входных и выходных сигналов операционного усилителя 3.
Использование: для настройки систем управления электроприводов переменного тока. Технический результат заключается в обеспечении простоты и наглядности настройки системы управления электроприводов переменного тока без знания параметров электродвигателя и без каких-либо расчетов. В предлагаемом способе в каналы токовой связи включены подстроечные резисторы, регулируя которые в установившемся режиме работы визуально контролируется минимум колебательности модуля потокосцепления статора, а следовательно, и точность настройки IR-компенсации. 3 ил.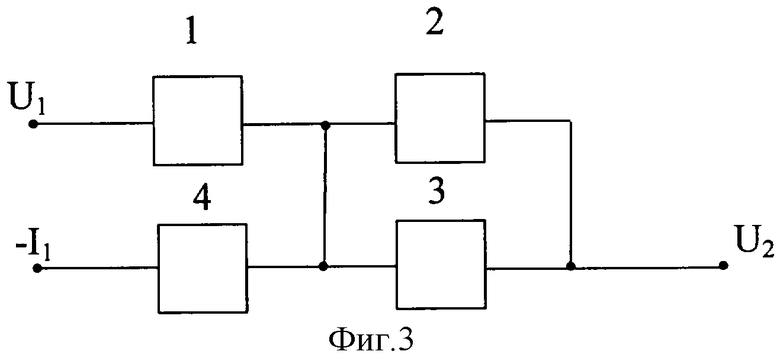
Способ настройки IR-компенсации в системах управления электроприводов переменного тока, отличающийся тем, что настройку осуществляют в установившемся режиме работы электродвигателя путем регулирования подстроечных резисторов, установленных в каналах токовой связи фаз электродвигателя, при этом по осциллограмме модуля потокосцепления статора визуально добиваются достижения минимума колебательности вышеуказанного модуля.
| ЭПШТЕЙН И.И | |||
| Автоматизированный электропривод переменного тока | |||
| - М.: Энергоиздат, 1982, с.18 | |||
| RU 2132110 C1, 20.06.1999 | |||
| Устройство для формирования составляющих опорного параметра ротора асинхронной машины с фазным ротором (его варианты) | 1980 |
|
SU1100699A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Прибор для непрерывного измерения толщины масляной пленки в подшипнике скольжения | 1950 |
|
SU91589A1 |

