Изобретение относится к землеройным машинам, а конкретнее к одноковшовым гидравлическим экскаваторам.
Известно рабочее оборудование гидравлического экскаватора, содержащее стрелу, рукоять с ковшом и силовые гидроцилиндры управления ковшом и стрелой, причем стрела прикреплена к одному концу дополнительного звена, которое другим концом прикреплено к платформе экскаватора. Звено поворачивается вокруг оси при помощи гидроцилиндра и позволяет увеличить радиус черпания, так как имеет одну степень свободы, а точка подвески стрелы перемещается по окружности (Смоляницкий Э.А. Рабочее оборудование полноповоротных гидравлических экскаваторов: обзор информ. /Э.А. Смоляницкий. - М., 1981. - 38 с. - (Экскаваторы и стреловые краны/ ЦНИИТЭстроймаш; вып.1)).
Наиболее близким техническим решением, выбранным в качестве прототипа, является рабочее оборудование экскаватора (А.с. СССР 185281, кл. Е02 3/38. Рабочее оборудование гидравлического экскаватора /М.Л.Куперман, А.А.Буланов, С.М.Беркман (СССР) - №1022639/29-14; заявл. 22.07.65; опубл. 27.09.66, Бюл. №16 - 2 с.), содержащее стрелу, рукоять, ковш, выполненное с перекидными рычагами на пяте стрелы и рукояти, обеспечивающими с помощью гидроцилиндров перемещение пяты стрелы и штока гидроцилиндра рукояти по дуге окружности из одного положения в другое.
Недостатком оборудования с точки зрения геометрии является то, что пята стрелы имеет только по одному фиксированному положению для прямой и обратной лопаты. При переводе экскаватора с прямой лопаты на обратную и наоборот точка крепления гидроцилиндра стрелы к платформе перемещается только в горизонтальной плоскости, что не способствует увеличению радиуса копания (выгрузки). Устройство упрощает переход с одного вида рабочего оборудования на другое и не рассматривает вопрос увеличения производительности. При трансформации механизма перемещается пята стрелы, тем самым изменяется положение центра тяжести рабочего оборудования, а следовательно, и устойчивость экскаватора, для корректировки которой необходимо изменять удерживающий момент противовеса. Так, например, при переводе рабочего оборудования в режим обратной лопаты увеличивается расстояние от точки крепления стрелы до оси вращения платформы, что снижает устойчивость, при этом резко уменьшается угол между стрелой и гидроцилиндром ее поворота. Уменьшение угла приводит к снижению подъемной составляющей силы гидроцилиндра и увеличению реактивных давлений, заставляющих снижать усилие на зубе ковша в момент разработки грунта.
Изобретение решает задачу повышения производительности за счет изменения угла между стрелой и гидроцилиндром ее поворота.
Указанная цель достигается тем, что рабочее оборудование одноковшового гидравлического экскаватора, включающее стрелу с рукоятью и ковшом, гидроцилиндры поворота стрелы, снабжено согласно изобретению дополнительным гидроцилиндром, один конец которого шарнирно связан с платформой, а другой с одним из плеч двуплечного рычага, который точкой качания присоединен к платформе, а другое плечо шарнирно соединено с гидроцилиндрами поворота стрелы.
Механизм позволяет перемещать точки крепления цилиндров поворота стрелы и тем самым изменять момент сил гидроцилиндров вращающих стрелу, т.е. увеличить подъемную составляющую гидроцилиндров.
Существенным отличием от прототипа является то, что установленный на платформе экскаватора дополнительный механизм дает возможность изменять расстояние между осью вращения стрелы и проушинами крепления цилиндров стрелы к механизму. Это позволяет увеличить составляющую подъема сил гидроцилиндров стрелы в требуемых зонах работы.
На фигуре 1 изображен механизм поворота стрелы. На фигуре 2 приведена схема изменения углов между стрелой и гидроцилиндром ее поворота. На фигуре 3 показан двуплечный рычаг.
На платформе 1 экскаватора расположен гидроцилиндр 2, который шарнирно связан с платформой 1 экскаватора (фиг.1). Другой конец гидроцилиндра 2 шарнирно связан с одной из проушин двуплечного рычага 3. Точкой качания двуплечный рычаг 3 шарнирно связан с платформой 1, а к другому плечу шарнирно присоединены гидроцилиндры 4 поворота стрелы 5. При перемещении штока гидроцилиндра 2 перемешаются проушины гидроцилиндров 4 поворота стрелы 5, связанные с ним через двуплечный рычаг 3, и изменяется угол α между продольной осью стрелы 5 и цилиндрами 4 ее поворота. Гидроцилиндры 4 в положении I используются преимущественно с оборудованием типа прямая лопата, а в положении II - преимущественно с обратной лопатой.
Экскаватор работает следующим образом. При разработке грунта, находящегося выше уровня стоянки экскаватора, перемещением штока гидроцилиндра 2 двуплечный рычаг 3 приводится в положение I. При этом угол α между продольной осью стрелы 5 и гидроцилиндрами 4 ее поворота в зоне угла поворота стрелы, при разработке грунта выше стоянки экскаватора, будет больше, чем при традиционной схеме экскаваторов, которая должна обеспечить поворот стрелы 5 для разработки грунта как выше, так и ниже уровня стоянки экскаватора.
При работе с рабочим оборудованием типа обратная лопата необходимо обеспечить наибольшую глубину копания и выгрузку в отвал или транспорт, т.е. сектор угла поворота стрелы расположен в нижней зоне. При работе экскаватора с оборудованием типа прямая лопата, применяемого в основном для разработки грунта выше уровня стоянки экскаватора, требуется обеспечить возможно большую высоту разработки забоя и разработку грунта немногим ниже уровня стоянки, т.е. сектор поворота стрелы расположен в верхенй зоне. Изменяя с помощью дополнительного механизма расстояние между пятой стрелы и проушиной крепления цилиндра поворота стрелы к дополнительному механизму, мы изменяем угол между стрелой и цилиндрами ее поворота.
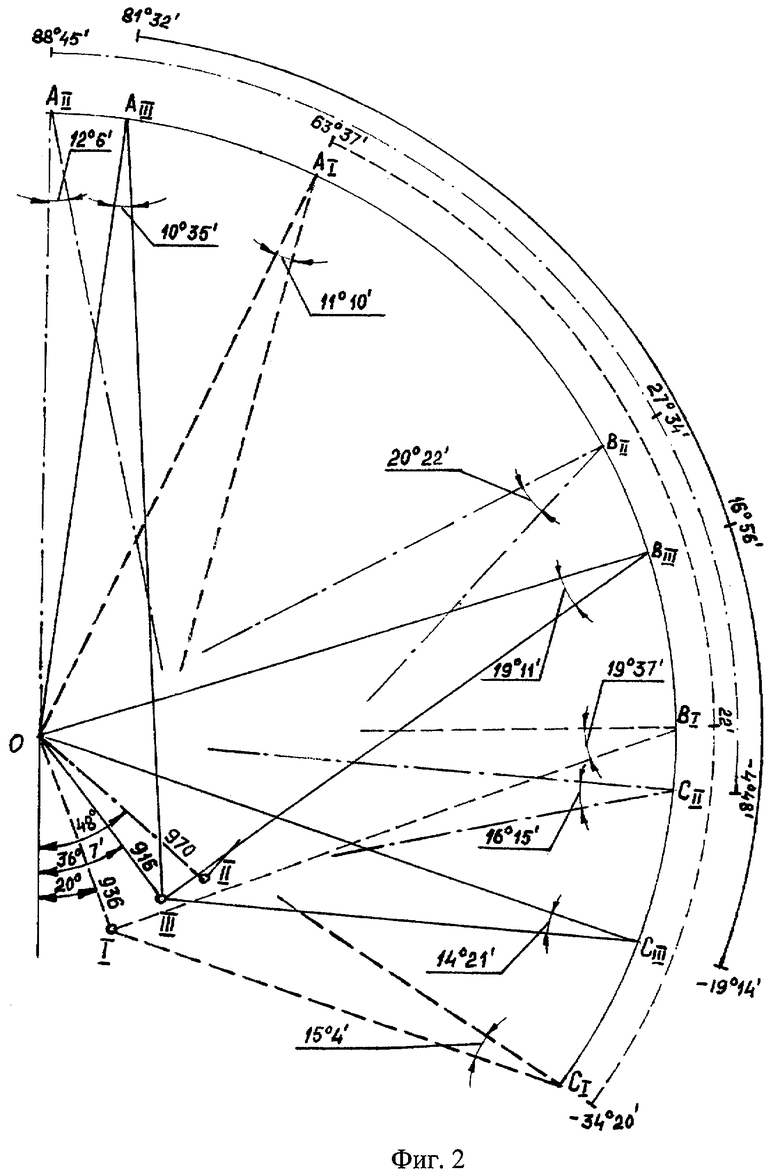
Изменение угловых параметров стрелоподъемного механизма между стрелой 5 и цилиндром ее поворота 4 приведено на фигуре 2. Для сравнения изменения углов α в пределах угла качания стрелы 5 при установке двуплечного рычага 3 в положение I или II на фигуре 2 построено дополнительное положение III, соответствующее базовой модели экскаватора V размерной группы.
Контроль изменения параметров стрелоподьемного механизма (фиг.2) проводится по трем точкам А, В и С, расположенным на дуге окружности качания стрелы. Точка А соответствует верхнему положению стрелы; В - положению, при котором угол α максимальный; С - нижнему положению стрелы. Для наглядности изображения шкалы показывающие значения углов поворота стрелы для каждой из трех точек обозначены соответствующими для данных точек линиями.
Как видно из фигуры 2, значения углов качания стрелы при расположении цилиндров поворота стрелы в одной из трех точек I, II и III составляют: для I-го положения 97°57'(от - 34°20' до 63°37'), для II-го равен 93°33'(от - 4°48' до 88°45'), для III-го равен 100°46' (от - 19°14' до 81°32'). Рассматривая верхние части секторов поворота стрелы (точки А) видно, что для II-го положения угол подъема стрелы наибольший (88°45'), также наибольший угол между стрелой и цилиндром ее поворота (12°6'). Анализ углов в нижней части секторов (точки С) показывает, что наибольший угол опускания стрелы у первого положения (- 34°20') и при этом угол между стрелой и цилиндром ее поворота для I-го положения (15°4') больше, чем для базовой модели (точка СIII, угол 14°21').
Значения углов при точках В показывают, что максимальная подъемная составляющая силы гидроцилиндров поворота стрелы имеет различное значение. Таким образом, видно, что дополнительный механизм позволяет, переносить сектор угла качания стрелы по окружности, изменять величину этого сектора и изменять угол между стрелой и цилиндрами ее поворота. Это позволяет увеличить подъемную составляющую гидроцилиндров в требуемых зонах работы. Как следствие этого снижаются реактивные нагрузки на гидроцилиндры стрелы при копании поворотом ковша или рукояти, что позволяет более полно реализовать силовой потенциал экскаватора, разрабатывать более прочные грунты и в конечном счете увеличить производительность экскаватора.
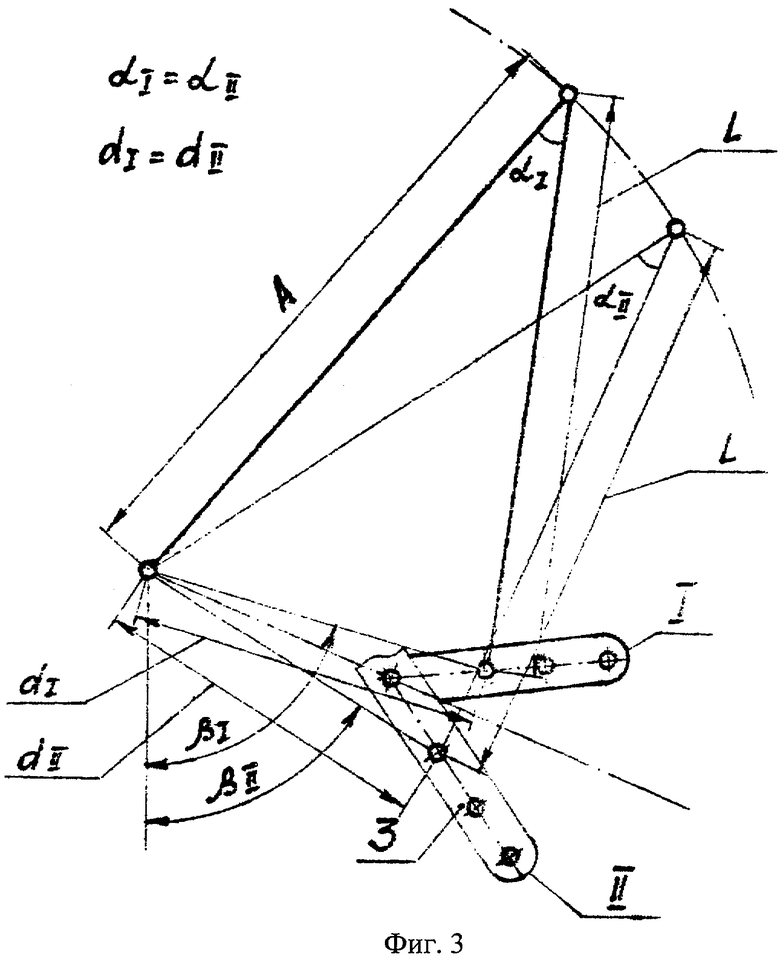
На фигуре 3 показан двуплечный рычаг 3 в двух положениях, и так как на рычаге имеется три отверстия для присоединения цилиндров стрелы, то получим соответственно шесть различных точек присоединения цилиндра стрелы относительно пяты. Обозначим расстояние между пятой стрелы и отверстием на рычаге для присоединения цилиндра стрелы через d, расстояние между пятой стрелы и местом присоединения цилиндра к стреле через А, длину цилиндра стрелы через L. По теореме косинусов получим угол α равен:
 ,
,
где А - имеет постоянное значение для каждого отдельного типа экскаваторов, пусть L=const, a d - переменная величина, которая для предлагаемого механизма изменяется в зависимости от положения рычага 3 и места присоединения на нем цилиндра стрелы. Тогда α=f(d) и для двух положений рычага 3 имеем шесть различных значений α. Для предлагаемого механизма расстояния d будут равны лишь в том случае, когда рычаг в положении I будет симметрично расположен рычагу II относительно оси, соединяющей пяту стрелы и ось поворота рычага 3. Но и в этом случае мы получим стрелоподъмный механизм с новыми параметрами, так как изменится угол наклона β отрезка d.
Тем самым даже при равных значениях d сектор угла поворота стрелы, оставаясь постоянным, имеет другое расположение на окружности вращения стрелы относительно пяты.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2010 |
|
RU2425927C1 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА ПРЯМАЯ ЛОПАТА | 2010 |
|
RU2428546C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1976 |
|
SU604914A1 |
| Рабочее оборудование прямая лопата гидравлического экскаватора | 2024 |
|
RU2829702C1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1979 |
|
SU897967A1 |
| Рабочее оборудование гидравли-чЕСКОгО эКСКАВАТОРА | 1979 |
|
SU831903A1 |
| Гидравлический экскаватор | 1986 |
|
SU1370190A1 |
Изобретение относится к землеройным машинам, а конкретнее к одноковшовым гидравлическим экскаваторам. Технический результат - повышение производительности за счет изменения угла между стрелой и гидроцилиндром ее поворота. Рабочее оборудование одноковшового гидравлического экскаватора включает стрелу с рукоятью и ковшом, гидроцилиндры поворота стрелы, при этом оно снабжено дополнительным гидроцилиндром, один конец которого шарнирно связан с платформой, а другой с одним из плеч двуплечного рычага, который точкой качания присоединен к платформе, а другое плечо шарнирно соединено с гидроцилиндрами поворота стрелы. 3 ил.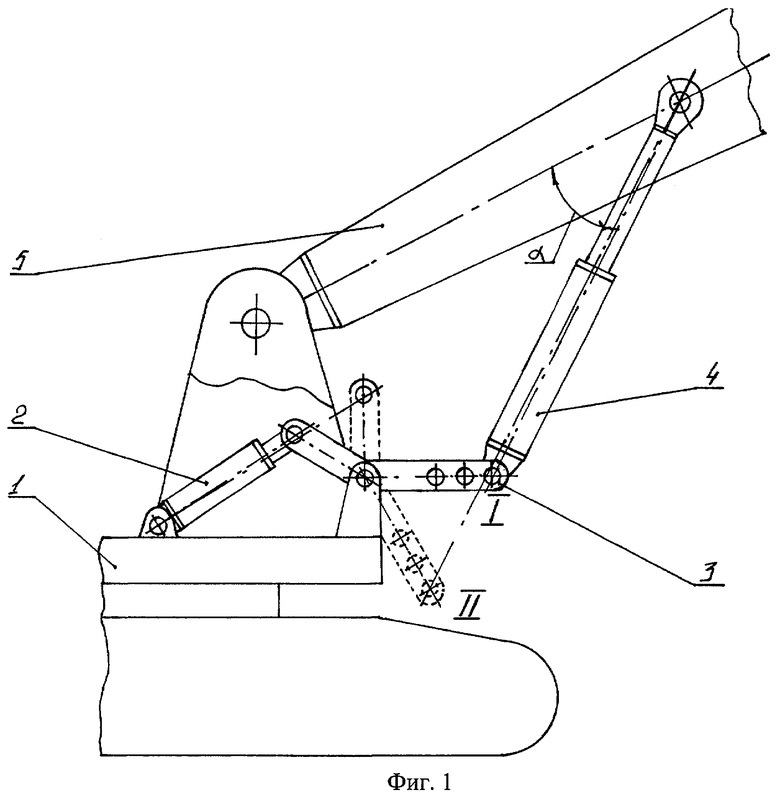
Рабочее оборудование одноковшового гидравлического экскаватора, включающее стрелу с рукоятью и ковшом, гидроцилиндры поворота стрелы, отличающееся тем, что оно снабжено дополнительным гидроцилиндром, один конец которого шарнирно связан с платформой, а другой - с одним из плеч двуплечного рычага, который точкой качания присоединен к платформе, а другое плечо шарнирно соединено с гидроцилиндрами поворота стрелы.
| 0 |
|
SU188908A1 | |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 0 |
|
SU185281A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 0 |
|
SU210755A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 0 |
|
SU339630A1 |
| Гидравлический экскаватор | 1975 |
|
SU646927A3 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |

